<응용논문> pISSN 2508-4003 eISSN 2508-402X
3차원 다물체동역학 시뮬레이션 기반 자기부상열차와 3경간 연속교 동적상호작용 해석
한종부1 · 김기정2†
1충남대학교 메카트로닉스공학과, 2충남대학교 첨단수송체연구소
Dynamic Interaction Analysis of Maglev and 3 Span Continuous Guideway Based on 3 D Multibody Dynamic Simulation
Jong-Boo Han1 and Ki-Jung Kim2†
1Dept. of Mechatronics Engineering, Chungnam Nat’l Univ.
2Research Institute for High-Technology Transportation, Chungnam Nat’l Univ.
Received 20 September 2016; received in revised form 13 October 2016; accepted 17 October 2016
ABSTRACT
This study aims to investigate dynamic interaction characteristics between Maglev train and 3 span continuous guideway. The integrated model including a 3D full vehicle model based on multibody dynamics, flexible guideway by a modal superposition method, and levitation electro- magnets with the feedback controller is proposed. The proposed model was applied to the Incheon Airport Maglev Railway to analyze the dynamic response of the vehicle and guideway from the numerical simulation. Using field test data of air gap and guideway deflections, obtained from the Incheon Airport Maglev Railway, the analysis method is verified. From the results, it is confirmed that Maglev railway system are designed and constructed safely accord- ing to the design criteria.
Key Words: Electromagnetic suspension, Maglev railway, Modeling and simulation, Multibody dynamic, Vehicle-structure interaction
1. 서 론
일반적으로 철도시스템은 바퀴식 방식이 주를 이루어왔으나 최근 마찰 저항이 거의 없으며 승 차감이 좋은 장점을 가진 자기부상 방식의 철도 시스템이 국내외에 활발히 도입되고 있다. 자기부 상철도는 지난 30여년간 연구가 활발히 이루어
졌으며, 독일, 일본, 중국에서 상용화되어 운영되 고 있다. 특히 국내에서는 인천공항에 자기부상철 도시스템이 건설되어 2016년 초에 개통되어 현재 운영되고 있다. 이러한 자기부상철도시스템은 차 량-궤도-제어기의 연성시스템으로 이루어지며 서 로 동적인 상호작용을 하게 되며, 이에 대한 연구 는 차량의 차량의 주행성능 향상과 최적의 구조 물 설계에 필수적이라 할 수 있다.[1] 또한 이 연성 시스템의 동역학적 특성은 차량 측면에서는 대차, 궤도 측면에서는 선로의 불규칙 형상과 구조물 유
†Corresponding Author, [email protected]
© 2016 Society for Computational Design and Engineering
연성에 의하여 주로 결정된다. 그러므로 차량의 주행 성능 향상을 위한 핵심 기술은 대차 시스템 설계와 차량과 궤도구조물의 상호작용 해석 및 평 가 기술에 달려있다고 할 수 있다.[1,2] 이러한 차량 과 궤도의 동적 상호작용 해석 기술은 저자유도 해석적 모델링에서 다 자유도 동역학 모델링 접 근법으로 연구가 수행되어 왔으나, 종방향 자유도 를 구속시킨 2차원 모델링이 다수를 차지하고 있 다.[3] 따라서 다양한 주행 환경과 대차 메커니즘 을 고려한 공간적 주행 시뮬레이션을 수행하기 위 해 운동 구속이 최소화된 정밀한 해석 모델이 요 구된다. 한편, 차량과 궤도 구조물의 동적 상호작 용 해석 기술은 저자유도 해석적 모델링, 다자유 도 동역학 모델링, FEM을 이용한 구조동역학 모 델링 그리고 가상시제 기반 동역학 모델링 접근 법으로 연구가 수행되어 왔다. 저자유도 해석적 모델링 기법은 제어기의 설계 및 평가를 목적으 로 하며 이론적 접근으로 설계변수의 영향을 신 속히 평가할 수 있는 장점이 있다.[4] 다자유도 동 역학 모델링 기법은 전체차량을 대상으로 하지 만 종방향을 구속시킨 2차원 수직운동에 대한 모 델링이 일반적이며 부상제어기, 승차감 그리고 차 간 연결기 평가 등에 이용될 수 있으며 궤도 구조 물은 주로 Euler-Bernoulli 단순 유연보 모델을 주 로 사용한다.[4,5] FEM을 이용한 구조동역학 모델 링은 모든 부품을 유연체로 표현할 수 있는 장점 을 가지며 부상력은 주로 선형화된 스프링-댐퍼로 표현한다. 하지만 제어기와 궤도의 불규칙도를 반 영하기 어려운 단점을 가지고 있다.[7] 그러므로 다 양한 주행환경과 대차 메커니즘을 고려한 공간적 시뮬레이션을 수행하기 위해 운동 구속이 최소화 되고 가상시제 기반의 정밀 모델이 요구된다. 본 논문에서는 가상시제 기반의 3차원 전체차량, 제
어기와 부상력 그리고 3경간 연속 궤도 구조물의 운동방정식을 하나로 통합 연성된 모델을 통해 인 천공항 자기부상철도 시스템에 적용하여 성능을 평가하는데 목적이 있다.
2. 모델링
2.1 자기부상열차 시스템 모델
본 논문의 저자는 이전연구에서는 실제적이고 정확한 동특성 해석을 위해 자기부상열차 시스템 에 대한 다물체 동역학 모델을 개발하여 단경간 궤도구조물 (single span guideway) 만을 대상으로 연구를 다수 수행하였다.[1,2,8] 본 논문에서는 인천 공항에서 운영 중인 3경간 연속교(3 span continuous guideway)의 동특성 모델을 기존 연성모델에 통합 하여 모델링 하고 연성 해석을 수행하고자 한다.
본 논문에서 제안한 모델링 기법과 해석 과정을 Fig. 2에서 보여주고 있다. 여기서 다물체 동역학 해석 프로그램은 Virtual Lab. Motion 프로그램을 이용하였으며, 모드중첩법을 이용한 3경간 연속 교, 전자석, 제어기들의 운동방정식을 별도의 사 용자 정의 서브루틴(user define subroutine)로 수 식화하고 차량모델과 연성으로 해석을 수행하게 된다. 해석 과정은 차량의 동역학 모델에서 위치, 속도, 가속도가 결정하게 되면 서브루틴에서는 공 극을 계산하게 된다. 그 다음에는 부상제어기와 전 자석 운동방정식을 이용하여 제어 전류 및 부상력 을 계산하고 그 힘들을 차량에 적용하게 된다. 이 때 궤도 운동방정식에도 부상력이 적용되어 처 짐, 속도, 가속도를 계산하게 되며 처짐은 다시 차 량에 외란으로 작용하게 된다.
2.2 차량
본 연구에서 대상으로 하는 자기부상열차는 2량1편성 전체차량이며, 차량 1편당 4개의 대차로 부착되며, 대차당 좌우 및 상하 4코너에 각각의 전 자석이 부착되어 차량시스템을 이루게 된다. 이러 한 구조로 바퀴식 열차와는 달리 분포하중을 궤도 구조물에 가해게 되므로 이 분포하중을 표현하기 위해 전자석 하나 당 21개로 이산화하여 부상력과 안내력을 표현할 수 있는 전자석 모델링을 수행하 였다. 또한 각각의 전자석은 제어가 독립적으로 이 루어지게 된다. 자세한 모델링에 대한 내용은 본 저자의 이전연구를 참조하기 바란다.[8]
Fig. 1 Maglev vehicle running on 3 span continuous guideway at the Inchon Airport
3. 전자석
본 논문에서 적용하고 있는 상전도흡인식 (Electromagnetic suspension system) 자기부상열차 는 전자석을 흡인력을 이용하여 부상하며 능동 제 어기를 이용하여 일정 부상공극(Vertical air gap) 을 유지하며 주행하게 된다.
자기부상열차를 제어하기 위한 전자석의 부상 력 Fz(t)은 식 (1)과 같이 평형상태에서의 부상력, F0(i0, c0)와 변화된 공극을 제어하기 위한 힘, 의 합으로 표현할 수 있다. 또한 Kirchhoff law에 의해 제어입력 전압의 변화량, ∆v 의 식을 으로 식 (2)와 같이 나타낼 수 있다.[9]
(1)
(2)
여기서,
, ,
F0 : 평형상태 부상력(N)
∆Fz : 제어 전자석 힘(N) i0 : 공칭점 전류(A) c0 : 공침점 공극(m)
식 (1)의 부상력은 궤도와 전자석의 위치에 따 라 부상력이 작용하는 수직방향과 횡방향의 분력 을 식(3), (4)와 같이 계산할 수 있다.[9]
(3)
Fz(Δi t( ),Δc t( )) Δ
i· ( )t Δ
0 0 0
2 2
0 0
0
( ) ( , ) ( ( ), ( )) ( ) ( ) 4
z z
z i
F t F i c F i t c t AN i k c t k i t
c µ
= + Δ Δ Δ
= ⎛ ⎞⎜ ⎟ + Δ − Δ
⎝ ⎠
0 0
( ) c ( ) ( ) 1 ( )
i
k R
i t c t i t v t
k L L
Δ& = Δ& − Δ + Δ
2 0 0
2 0
L N A c
= µ 0 22 0
2 0
i N Ai
k c
= µ 0 23 03
2 0
c N Ai
k c
= µ
2 tan 1 m
c d
Fy F
πω − c
⎡ ⎛ ⎞⎤
= × −⎢⎣ ⎜ ⎟⎝ ⎠⎥⎦ Fig. 2 Modeling and simulation process
(4) 여기서,
Fy: 안내력(N), c: 부상공극(m), Fz: 부상력(N), d: 횡공극(m), ωm: 전자석 폭(m)
식 (3-4)에서의 부상공극 c, d을 계산하기 위해 Fig. 3과 같이 전자석과 궤도의 좌표를 설정 하고, 정의된 벡터에 의해 식 (5)와 같이 부상 공극을 계 산할 수 있는 기구학식으로 정의할 수 있다.[8]
(5) 또한 제어 전류의 변화량을 계산하기 위한 부상 공극 속도 는 식 (5)를 미분하여 식 (6)과 같 이 유도할 수 있다. [8]
(6) 여기서, At, Am은 각각 궤도 좌표계와 전자석 좌표 계에서 기준좌표계로의 변환 행렬을 의미한다.
부상제어는 부상 공극 변화량 ∆c(t)을 허용 범위 내로 유지하기 위해 5개의 관측 상태변수를 이용 한 전압 ∆v(t)을 제어하는 방법을 이용한다.[1,2,8]
(7) 여기서, 는 관측 가속도, 는 관측 속
도, 는 관측 위치, 는 관측 공극, (t) 는 관측 공극 속도이며, 그리고 k1, k2, k3, k4, k5는 제어 게인들이다.
5개의 관측 상태 변수는 관측기에 의해서 계산 된다. 이 관측기는 차량에 부착된 전자석의 수직 방향 가속도와 공극의 크기를 측정하여 입력으로 사용하고, dynamic filter에 의해서 추정된다.
2.4 3 경간 연속교 모델
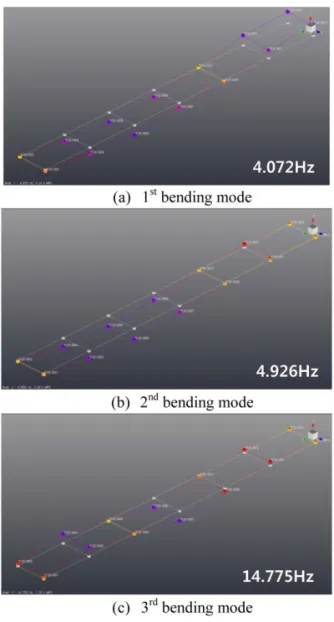
일반 바퀴식 열차와 마찬가지로 자기부상열차 도 장경간화(Long span guideway)가 필연적이므 로 인천공항 시범노선에도 3경간 연속교가 건설 되었다. 이에 본 논문은 3경간 연속교를 모델링하 여 그에 대한 동적응답을 예측하고 분석하고자 한 다. 본 논문에서 대상으로 하는 3경간 연속교는 인 천공항 자기부상열차 시범노선 중 직선 최고 속도 구간이며, Fig. 4와 같이 경간 사이는 35 m이며, 총 길이 105 m이다. 유한요소 모델링을 통해 모 드 해석을 수행하였으며 수직 1차 굽힘 모드의 고유진동수는 3.958 Hz, 모달 매스(Modal mass) 는 340.45 ton으로 측정되었다. 2차 수직 굽힘모 드의 고유진동수는 4.991 Hz이고 모달 매스는 232.57 ton으로 측정되었으며 3차 수직 굽힘모드 에서는 고유진동수는 15.417 Hz, 모달 매스는 340.83 ton으로 측정되었다. 유한요소 모델의 신뢰성을 확 보하기 위해 인천공항 3경간 연속교의 구간에 대 해 모달 시험을 수행하였다. Fig. 5에서 보는 바와 같이, (a)는 수직 1차 굽힘 모드이며 고유진동수는 4.072 Hz, 감쇠비(damping ratio)는 0.15%으로 측정되었다. (b)는 2차 수직 굽힘모드 형상이며, 고유진동수는 4.962 Hz이고 감쇠비는 0.59%으로 측정되었다. (c)는 3차 수직 굽힘모드를 보여주고 있으며, 고유진동수는 14.775 Hz, 감쇠비는 1.70%
으로 측정되었다. 굽힘모드 외에 상행선과 하행선 복선으로 서로 가로보로 연결되어 있는 구조로 인 해 뒤틀림 모드도 나타났으며, 9 Hz 부근의 고유 진동수를 갖는 것을 확인하였다. 하지만 본 논문 2 2 1
1 tan
m m
c d c
Fz F
πω πω d
⎡ − ⎛ ⎞⎤
= × +⎢⎣ + ⎜ ⎟⎝ ⎠⎥⎦
' '
tm= −t m= ot+ t ot− om− m om
r r r r A s r A s
( ) c t&
' '
' ' ' '
tm t m ot t ot om m om
ot t t ot om m m om
= − = + − −
= + − −
r r r r A s r A s r A ω s r A ω s
& &
& & & & &
& % & %
1 2 3
4 5
ˆ ˆ ˆ
( ) ( ) ( ) ( ) ˆ( ) ˆ( ) v t k z t k z t k z t
k c t k c t Δ = Δ + Δ + Δ
+ Δ + Δ
&& &
&
z tˆ( )
Δ&& Δ&z tˆ( )
z tˆ( )
Δ Δc tˆ( ) Δˆc&
Fig. 3 Definition of air gap and coordinate
Fig. 4 Schematic of 3 span continuous guideway
에서는 1, 2, 3차의 굽힘 모드만 반영하였으며 향 후 정확한 해석을 위해 뒤틀림 모드를 반영한 해 석을 수행할 예정이다. 유한요소 모델과 비교해보 면 고유진동수와 모드형상이 거의 유사함을 알 수 있으며 Table 1에 수치적으로 비교 제시하였다.
3경간 연속교의 운동방정식을 유도하기 위하여 식 (8)과 같이 일반좌표계, qn(t)와 진동 모드, φn(xijkl)의 곱으로 표현하였다. 이때 궤도와 차량과 의 동적상호작용을 고려한 동방정식은 식 (9)와 같다.
(8)
(9)
여기서, ,
는 식 (4)의 부상력이다. 궤도와 차량 모델을 연성 시키기 위해서 식 (9)를 상태 공간 방정식으로 변 환하여 시스템 통합모델에 적용하였다. 결과적인 궤도의 운동방정식은 식 (10)과 같다.[8]
(10)
여기서, 는 궤도의 일반화된 좌
표의 위치 및 속도이며, 는 각 모 드에 따른 궤도 중앙부 처짐, 속도, 가속도를 의미 한다.
A, B, C, D는 각각 다음의 행렬을 의미하며, M 은 각 모드 별 질량행렬, K는 각 모드 별 강성행 렬 그리고 C는 각 모드 별 감쇠행렬을 나타낸다.
,
,
3. 해 석
3.1 선로 불규칙도
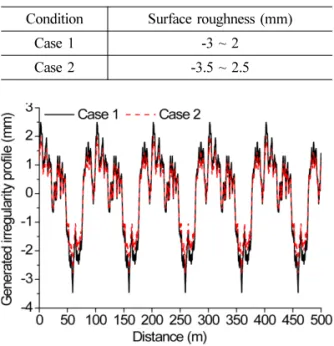
서론에서 언급한대로 자기부상철도 시스템의 부 상안정성과 승차감 등의 동특성은 궤도 측면에서 는 선로의 불규칙 형상과 구조물 유연성에 의하여 주로 결정된다. 본 논문에서는 차량과 3 경간 연 속교의 동적상호작용의 특성을 분석하는 것이므 로 궤도의 처짐과 불규칙도를 고려하였다. 본 논 문에서는 인천공항 선로의 불규칙도가 설치 공차 기준이 ±3 mm 이내인 점을 감안하여 Table 2에 제시된 2가지 최대 편차를 가지는 표면 조도 형상 을 외란 입력으로 사용하며, 이산적인 표면 조도 형상 데이터를 보간법을 이용하여 연속 형상화한
1
( , ) N n( ) ( )n n
u x t q tφ x
=
=
∑
( , )
T
n n n n n n n
M q&& +C q& +K q =φ P x t
0
1 1 1 1
( , ) NcarNbogieNems discretForceN ( , )
i j k l
P x t F x t
= = = =
=
∑ ∑ ∑ ∑
F x t0( , )( ) ( ) ( , ) ( , ) ( ) ( , ) x t Ax t BP x t y x t Cx t DP x t
= +
= +
&
[ ( ), ( )]n n T
x= q t q t&
[ n, ,n n]T
y= u u u& &&
1 1
0
n n n n
A I
M K− M C−
⎛ ⎞
= ⎜⎝− − ⎟⎠ 1
0 B n
M−
⎛ ⎞
= ⎜ ⎟
⎝ ⎠
1 1
0 0
n
n
n n n n n n
C
M K M C
φ
φ
φ − φ −
⎛ ⎞
⎜ ⎟
= ⎜⎜⎝− − ⎟⎟⎠ 1
0 0
n n
D M φ −
⎛ ⎞
⎜ ⎟
= ⎜ ⎟
⎜ ⎟
⎝ ⎠
Fig. 5 Vibrational mode shapes
Table 1 Comparison of vibration mode between analysis and test
1st mode 2nd mode 3rd mode Mode analysis 3.96 Hz 4.99 Hz 15.4 Hz Field modal test 4.07 Hz 4.92 Hz 14.77 Hz
다. 생성된 랜덤 표면 조도 형상을 Fig. 4에서 보 여주고 있다.
3.2 3경간 연속교 동적 응답
가이드웨이 처짐에 대한 분석을 하고자 Fig. 7 에 각 속도별 중앙부 최대 처짐 응답을 보면 10 km/h 기준 좌우 측면 구간은 4.19 mm, 중앙 구 간은 2.18 mm 처짐이 측정되었다. 최고속도인 110 km/h에서는 좌우 측면 구간은 4.26 mm, 중앙 구간은 2.22 mm로 계산되어 속도에 따른 동적 증 폭 효과는 거의 없는 것을 알 수 있다. 여기서 주 목할 점은 3경간 연속교의 경우 측면 구간에서의 처짐이 더 발생하는데 차량이 중앙 구간에서 위치 한 경우 궤도의 질량의 효과를 볼 수 있지만, 측면 구간에서는 그 만큼 질량 효과를 볼 수 없기 때문 이라고 판단된다.
참고문헌[10] Table 3에 인천공항 3경간 연속교의 처짐을 실제 측정한 데이터가 속도별로 제시되어 있다. 대상 궤도구조물의 중앙부 처짐을 측정한 데 이터와 본 논문에서 해석을 통한 데이터를 Table 3에 비교하여 제시하였다. 그 결과 0.3~0.4 mm 의 오차가 발생하였다. 이러한 오차는 실제 3경간 연 속교는 상행선과 하행선의 복선으로 이루어져 있 으며 서로 가로보로 연결되어 있기 때문에 한쪽 주행 시 뒤틀림 모드가 발생하므로 이를 반영하지 않은 결과라 판단된다. 즉 비틀림 모드에 의해 실
제 측정에서의 처짐이 더 발생한 것이라 할 수 있다.
3.3 차량의 동적 응답
선로의 불규칙도와 궤도의 처짐에 따른 차량의 부상공극 응답을 평가하였다. 대표적인 예시로 인 천공항 자기부상철도 시스템의 설계 최고 속도인 110 km/h에서의 부상공극 응답 시간이력을 Fig. 8 에 제시하였다. 설계된 부상공극 제어 기준인 3 mm Table 2 Condition of input disturbance
Condition Surface roughness (mm)
Case 1 -3 ~ 2
Case 2 -3.5 ~ 2.5
Fig. 6 Surface roughness of guiderail
Fig. 7 Deflections of 3 span continuous guideway
Table 3 Comparison of analysis and test
Velocity Test Analysis
10 km/h 2.61 mm 2.18 mm
30 km/h 2.55 mm 2.18 mm
50 km/h 2.56 mm 2.2 mm
70 km/h 2.55 mm 2.2 mm
90 km/h 2.56 mm 2.2 mm
110 km/h 2.62 mm 2.22 mm
Fig. 8 Air gap time histories, 110 km/h
이내를 만족하는 결과를 보이고 있다.
해석의 부상응답 결과를 시험과 비교하여 해석 의 타당성을 확보하고자 부상 공극의 변동 최대값 을 취하여 Fig. 10에 나타내었다. 해석과 시험 결 과 모두 속도가 증가함에 따라 부상공극의 최대값 은 증가하는 경향을 보여주었으며, 시험을 통한 부 상공극 최대 응답은 case 1과 case 2 조건의 해석 결과 범위 내에 있는 것을 알 수 있다. 결론적으로 시험과 시뮬레이션 부상공극 응답 결과를 통해 유 사성을 확인하였으며, 시뮬레이션 결과의 신뢰성 을 확보하였다.
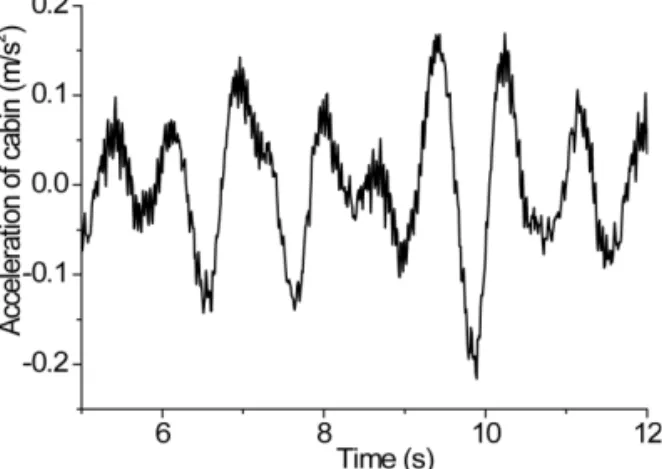
일반적으로 열차의 동적 거동을 평가하는데 있 어 승차감은 중요한 지표이므로 본 논문에서 차량 의 수직 가속도 값을 측정하여 평가하고자 한다.
주행 설계 최고 속도인 110 km/h에서의 차량의 수 직 가속도 시간 이력을 Fig. 10에 보여주는 바와 같이 최대값은 0.216 m/s2 를 나타내고 있다. 속도 에 따른 차체의 수직방향 최대 가속도 크기를 취 하여 그래프로 나타내었다. 차체의 수직 가속도는 Fig. 11에 나타난 바와 같이 속도가 증가함에 따라 증가함을 알 수 있다. 차체 설계 최고속도인 110 km/h 주행 시 차체 가속도는 저속인 10 km/h 의 주행 시 보다 약 10배 정도 큰 가속도 값을 보 이고 있다. 이는 저속에서는 처짐이 발생하더라도 표면조도와 같이 외란 형상에 따라 완만하게 전자 석이 추종하기 때문에 진동이 크지 않지만 고속에 서는 전자석의 추종오차 즉 부상공극 변동이 커지 므로 차체 가속도에도 영향을 주는 것을 알 수 있 다. 결론적으로 같은 처짐 조건에서는 속도가 증 가함에 따라 처짐에 따른 전자석의 추종성이 나빠
져 차량의 승차감에 영향을 준다고 할 수 있다.
4. 결 론
본 논문에서는 인천공항 자기부상철도 시스템 의 성능평가를 위해 다물체동역학 기반의 3차원 차량과 3경간 연속교량의 동적상호작용 모델이 제 안되었다. 제안된 모델은 3차원 전체 차량, 모달중 첩에 의한 2차원 유연가이드웨이, 피드백 부상제 어기 및 가이드웨이 불규칙도를 하나의 시스템으 로 통합한 모델이다. 제안된 통합 해석 모델이 시 험과 유사한 동특성을 갖는 것이 부상공극과 궤도 의 처짐을 비교하여 검증되었다. 해석을 통해 도 출된 결론은 부상안정성 평가 지표인 부상공극은 설계 최고속도인 110 km/h에서 제어 가능한 공극 인 3 mm 이내를 보였으며 승차감 평가에서도 역 시 매우 좋은 승차감을 보임을 확인했다. 궤도의 동특성 평가인 처짐은 속도에 따른 동적 증폭 효 과는 거의 없음이 밝혀졌으며, 설계기준인 L/3000 Fig. 9 Comparison of test and analysis
Fig. 10 Cabin acceleration response, 110 km/h
Fig. 11 Peak of cabin acceleration
(=11.67 mm) 이내를 충분히 만족하고 안정성을 반 영하여 설계 및 시공되었음을 알 수 있었다.
감사의 글
본 연구는 국토교통부 철도기술연구사업의 연 구비지원(과제 15RTRP-B070556-03)에 의해 수행 되었습니다.
본 연구의 내용 중 ‘2. 4의 3경간 연속교의 진동 시험’은 국토교통부에서 시행하는 “도시형자기부 상열차 실용화사업” 중 세부과제인 “인천공항 자 기부상철도 선로구조물 성능평가” 과제로부터 지 원을 받아 수행한 연구 결과입니다.
References
1. Kim, K.J., Han, J.B., Han, H.S. and Yang, S.J., 2015, Coupled Vibration Analysis of Maglev Vehicle-guideway While Standing Still or Mov- ing at Low Speeds, Vehicle System Dynamics, 53(4), pp.587-601.
2. Han, J.B., Han, H.S., Kim, S.S., Yang, S.J. and Kim, K.J., 2016, Design and Validation of a Slender Guideway for Maglev Vehicle by Sim- ulation and Experiment, Vehicle System Dynamics, 54(3), pp.370-385.
3. Meisinger, R., 1979, Simulation of Maglev Vehi-
cles Riding over Single and Double Span Guide- ways, Mathmatics and Computers in Simulation, XXI, pp.197-206.
4. Popp, K., 1981, Mathmatical Modeling and Con- trol System Design of Maglev Vehicles, Con- ference on Dynamics of High Speed Vehicles, pp.333-363.
5. Cai, Y., Chen, S.S., Rote, D.M. and Coffey, H.T., 1994, Vehicle/guideway Interaction for High Speed Vehicles on a Flexible Guideway, Journal of Sound and Vibration, 175(5), pp.625- 646.
6. Dai, H.G., 2005, Dynamic Behavior of Maglev Vehicle/guideway System with Control, Ph.D.
Dissertation, Case Western Reserve University.
7. Han, H.S., 2003, A Study on the Dynamic Mod- eling of a Magnetic Levitation Vehicle, JSME International, 46(4), pp.1497-1501.
8. Kim, K.J., Han, H.S. and Yang, S.J., 2013, Analysis of Dynamic Interaction between Maglev Vehicle and Guideway, Trans. Korean Soc. Mech.
Eng A, 37(12), pp.1559-1565.
9. Sinha, P.K., 1987, Electromagnetic Suspension Dynamics & Control, Peter Peregrinus Ltd, Lon- don, United Kingdom.
10. Lee, J.H., Kim, L.H. and Kim, S.L., 2014, Ver- ification of an Analysis Method for Maglev Train-guideway Interaction Using Field Mea- surement Data, Journal of the Korean Society of Railway, 17(4), pp.233-244.
한 종 부
2009년 충남대학교 기계·기계설계·
메카트로닉스 공학과 학사 2012년 동 대학원 메카트로닉스
공학과 석사
2012년~현재 동 대학원 박사과정
김 기 정
2009년 충남대학교 메카트로닉스 공학과 공학사
2011년 충남대학교 메카트로닉스 공학과 공학석사
2014년 충남대학교 메카트로닉스 공학박사
2014년 3월~현재 충남대학교 첨단 수송체 연구소 연구교수