大 韓 土 木 學 會 論 文 集 第29卷 第2D 號·2009年 3月 pp. 295~303
鐵 道 工 學
선로특성이 능동제어 자기부상열차의 주행성에 미치는 영향
Effect of Guideway Characteristics on Runnability of Actively Controlled Maglev Vehicle
이준석*·김문영**·권순덕***·여인호****
Lee, Jun-Seok·Kim, Moon-Young·Kwon, Soon-Duck·Yeo, In-Ho
···
Abstract
The purpose of present study is to examine the effect of guideway characteristics on runnability of low and medium speed maglev vehicle. Dynamic governing equation for 2-dof vehicle and optimal feedback control scheme are developed. And then the effect of vehicle speed, rail roughness, guideway deflection, continuity of spans, each span length on dynamic response of the UTM-01 maglev vehicle are investigated. From the numerical simulation, it is found that the gap between bogie and guide- way does not increase greatly within design velocity of the vehicle. The response of vehicle are mostly affected by the guide- way deflection rather than rail roughness. As a result of the present study, the runnability of maglev vehicle can be improved by reducing the maximum deflection of guideway and adopting the continuous girder systems.
Keywords :maglev, guideway, roughness, runnability, active control
···
요 지
본 연구에서는 가이드웨이의 특성이 중저속 자기부상열차의 주행성에 미치는 영향을 파악하는데 목적을 두고 있다. 이를 위하여 자기 공극의 피드백을 포함한 2자유도 차량에 대한 운동방정식을 구성하고, 최적능동제어기법을 적용하여 수치해석을 수행하였다. 매개변수 연구로 차량 속도, 레일조도, 교량 처짐, 경간의 연속성, 경간장 등이 UTM-01 자기부상열차의 응답에 미치는 영향을 파악하였다. 해석 결과를 보면, 차량 설계속도 내에서는 차량의 응답이 크게 증가하지 않고 일정한 수준을 유지하였으며, 차량의 응답은 주로 가이드웨이 처짐에 의하여 지배를 받은 것으로 나타났다. 결론적으로 차량 공극의 변화를 줄여서 주행성을 향상시키려면 가이드웨이의 최대 처짐을 작게 하고, 단순거더 보다는 연속거더 구조로 구성하는 것이 유리 한 것으로 나타났다.
핵심용어
:자기부상열차, 가이드웨이, 조도, 주행성, 능동제어
···
1. 서 론
도로교량과는 달리 철도교량은 일정한 간격을 갖는 축하중 이 반복작용하므로 공진의 발생가능성이 항상 존재한다. 유 럽이나 일본과 같은 철도선진국에서는 이와같은 주행열차하 중에 의한 공진발생 가능성을 염두에 두고 처짐, 교량의 고 유진동수, 상판의 수직가속도 등에 대하여 실열차 시뮬레이 션에 의한 교량 동적해석을 설계기준으로서 명문화(ERRI,
Eurocode, UIC, CTRL
등)하고 있다.
자기부상열차는 독일과 일본에서 주로 개발되어 최근에 최 고 주행속도가 500km/h를 넘고 있다. 그러나 대부분의 선진 국은 이미 철도 인프라가 구축되어 있고, 바퀴를 사용한 고 속열차 시스템도 갖추어져 있다. 따라서 새로운 선로 건설이
필요한 자기부상열차는 시험선을 제외하고는 경제성이나 호 환성 때문에 제대로 건설되지 못하고 있다. 이러한 이유로 독일에서 개발된 초고속 자기부상열차인 Transrapid도 자국 에서 상용화되지 못하고 중국 상하이에 건설되었다. 이런 측 면에서 우리나라도 KTX가 이미 건설되어 있으므로 도시지 역의 경전철 등을 대신할 수 있는 최고속도 100km/h의 중 저속 도시형 자기부상열차사업을 현재 진행중에 있다.
기존 자기부상열차 관련 연구를 보면, 주로 전자기력에 의 한 EMS(Electro Magnetic Suspension)를 등가의 강성과 감쇠를 가진 선형화된 수동계로 치환하여 모델링한 연구가 다수를 차지하고 있다(Hedrick 등, 1975; Cai 등, 1994).
그 외 기계 혹은 전자 분야 연구자들이 차량과 가이드웨이 의 간격을 감지하여 제어하는 능동시스템을 연구하였으나
*성균관대학교건설환경연구소연구원·공학박사 (E-mail : [email protected])
**정회원·성균관대학교 사회환경시스템공학과 교수·공학박사 (E-mail: [email protected])
***정회원·교신저자·전북대학교토목공학과부교수·공학박사 (E-mail : [email protected])
****정회원·한국철도기술연구원 선임연구원·공학박사 (E-mail: [email protected])
(Kusagawa
등, 2004; Dai, 2005; Zheng 등, 2000) 교량의 영향을 고려한 연구는 드물다. 자기부상열차 신규사업에서 가이드웨이 교량을 건설하는데 전체 사업비의 약 40~80%의 소요된다고 추정되므로(Thornton 등, 2004; Cai 등, 1994) 차량의 개발과 아울러 경제성이 뛰어난 가이드웨이 교량의 개발도 매우 중요하다.
이러한 측면에서 경제적 및 기술적으로 적절한 가이드웨이 교량의 설계는 자기부상열차사업의 성패를 가를 수 있는 요 소중의 하나이다. 그런데 가이드웨이 교량의 여러 가지 특성 들이 거꾸로 자기부상차량의 주행성에 영향을 미치므로 이 를 평가하여 적절한 설계기준을 만들 필요가 있다. 본 연구 에서는 선로의 여러 특성이 능동제어되는 자기부상차량의 주 행성에 미치는 영향을 정량적으로 파악하여 가이드웨이 교 량의 설계기준을 만들기 위한 기초 자료를 제시하는데 목적 을 두고 있다. 이를 위하여 자기 공극의 피드백을 포함한 2 자유도 차량에 대한 운동방정식을 구성하고, 최적능동제어기 법을 적용하여 수치해석을 수행하였다. 해석 예제로 노면조 도, 차량 속도, 최대 처짐비, 연속 경간의 구성, 경간장 등 과 같은 선로시설물의 특성이 국내에서 개발된 UTM-01차량
(그림 1)의 공극 변화에 미치는 영향을 파악하였다.
2. 제어계의 지배방정식
2.1
자기부상력
자기부상열차는 보기(Bogie)에 설치된 전자석으로부터 부 상력을 얻어서 가이드웨이 위를 떠서 지나게 된다. 이렇게 보기와 가이드웨이 사이에 설치된 전자기력을 발생시키는 시 스템을 EMS(Electro-Magnetic Suspension)라 하며, 자기부 상열차의 핵심적이 요소이다. 자기부상열차에서는 초당 수천
번씩 보기와 가이드웨이의 간격을 측정하고, 이를 바탕으로 전자기력을 조정한다. 따라서 이러한 피드백 구조를 적절히 모델링해야 자기부상열차의 거동을 표현할 수 있다.
EMS
에서 발생하는 자기부상력과 입력 전류의 관계는 비 선형이다. 하지만 정지 부상 간격(e
20)이 확보된 다음에는 아 래 식과 같이 선형화가 가능하다(Sinha, 1987).
(1) (2)
(3)
여기서, i
0,∆i: 초기 및 변동 입력전류, A
m:자석 면적, µ
0:진공에서 투과계수, N
m:코일수, F
m0:정적 평형상태에서의 자력, F
m:총 자력, ∆F
m:변동 자력, e
20과 ∆e
2:그림 2에 표시된 정적 평형 공극 및 상대 공극, k
i과 k
e:전류와 공 극에 비례하는 등가 강성이다.
식 (3)을 보면 k
e앞에 (-)부호가 있으므로 공극이 커질수 록 부상력은 약해지나, 제어에 의해서 입력전류의 세기를 키워서 부상력을 벌충하게 된다. 한편 입력전류의 변화량과 공극 및 전압은 다음 식 (4)와 같은 관계가 있다(Sinha,
1987).(4)
여기서, R
0:자석의 릴럭턴스, L
0:자석의 인덕턴스, ∆v: 제 어전압이며 인덕턴스는 다음과 같이 나타낸다(Sinha, 1987).
(5)
본 논문에서는 실제 차량을 1지점 이동으로 단순화하였고 따라서 차량은 단순히 연직방향운동(bouncing) 만을 한다고 고려하였다. 또한 교량의 질량 등에 의한 동특성 등을 고려 하지 않으며 교량의 처짐을 미리 가정하여 차량의 속도에만 영향을 가진다고 가정하였다.
2.2
운동방정식
자기부상열차는 부상력과 관련된 수직방향 거동이 중요하 므로 본 연구에서는 자기부상열차를 객차와 보기로 구성된
Fm=Fm0+
∆
FmFm0
µ
0NmAm2i02 4e202 ---=
Fm
∆ µ
0Nm2Ami0 2e202--- i t
∆ ( ) µ
0Nm2Ami02 2e203--- e
∆
2( )
t –=
ki
∆ t() k
i – i∆ t()
e2=
i·
∆
ke ki ---- e·∆
2R0 L0 --- i
∆
– 1
L0 --- v
∆
+=
L0
µ
0Nm2Am 2e20 ---=
그림
1.중저속 자기부상열차
UTM-01그림
2.자기부상열차
-가이드웨이 해석모델
2
자유도계로 단순화하였다. 그림 2와 같이 자기부상열차의 객 차와 보기 사이에는 2차 현수장치인 에어스프링이 설치되어 있고, 가이드웨이와 보기 사이에는 EMS가 작용한다.
이동하중의 경우에 가이드웨이의 동특성을 전체 운동방정 식에 포함시키면 감쇠 및 강성 행렬이 시간에 따라 변하는 시스템이 되어서 제어계를 구성하기가 쉽지 않게 된다. 또한 지점(가이드웨이)이 움직이면 자기부상력을 선형화하는데도 어려움이 있다. 그래서 Morita(2004)나 Fang(2004) 등은 교 량의 정적 처짐을 차량의 지점 가진으로 입력하는 간접적인 방법을 사용하였다. 본 연구에서도 이와 유사하게 가이드웨 이 교량의 동특성을 운동방정식에 포함하지 않고, 미리 계산 된 처짐 형상을 일종의 조도처럼 입력하였다.
자기부상열차와 가이드웨이의 진동을 표현하기 위하여 절 대좌표계 대신에 상대좌표계를 사용하면 편리하다. 아울러 차량이나 가이드웨이의 절대 변위는 계측이 불가능하므로 피 드백 제어를 위해서도 상대좌표계가 유리하다. 이러한 점을 고려하여 그림 2의 자유물체도와 식 (1)을 사용하여 상대좌 표계로 운동방정식을 구하면 식 (6)과 같다.
(6)
여기서, m
1, m2:객차와 보기의 질량, k
s, cs: 2차 현수장치 의 강성 및 감쇠, y, : 보기 밑의 가이드웨이 처짐 및 가 속도, r, : 보기 밑의 레일 조도 및 그 가속도
e1=e10+∆e1:객차와 보기 사이의 정적 평형 및 변동 상대변 위, e
2=e20+∆e2:보기와 가이드웨이 사이의 정적 평형 및 변동 상대변위(공극).
식 (6)을 상태방정식의 형태로 나타내면 다음 식 (7)과 같다.
(7)
2.3
능동제어 알고리즘
식 (7)의 운동방정식을 간략히 표현하면 아래와 같이 쓸 수 있다.
(8)
여기서, A: 상태 행렬, B: 제어기의 위치 행렬, u: 제어 력 벡터, f: 외력 벡터, H: 외력의 작용 위치 행렬, z =
.
식 (8)에서 상태 벡터는 상대 변위와 한번 미분치인 상대 속도 그리고 전류로 실제로 계측이 가능한 항목이다. 따라서 능동제어시 출력 되먹임 제어를 하지 않고 전체 상태 되먹임 제어(full state feedback control)도 가능하다. 본 연구에서 사용한 최적제어이론은 식 (8)의 제약조건하에서 응답과 제 어력의 성능지수를 최소화시켜고, 행렬 Riccati 방정식을 풀 어서 최적 제어 이득(G)을 구하였다(Soong, 1990). 이렇게 구한 이득을 사용하여 전체 시스템을 제어하는 과정은 그림
3에 나타내었으며 MATLAB(2004)을 사용하여 구현하였다.
3. 해석 예제
3.1
차량의 제원
그림 1에 나타난 만차시의 UTM-01 중저속 자기부상열차 제원은 표 1과 같다. UTM-01은 하나의 객차와 세 개의 보 기로 구성되며, 하나의 보기에는 양쪽에 각각 4개씩 전자석 이 설치되어 있다(정정훈, 2006). 그림 2와 같은 해석모델을 사용하므로 보기의 제원은 3개를 통합하여 나타내었고, 정지 부상간극은 11mm이다.
자기부상열차에 작용하는 외력은 크게 레일조도, 선로처짐, 풍하중으로 나눌 수 있다. 본 연구에서는 이중에서 풍하중을 제외하고 레일조도와 선로처짐을 식 (7)의 외란으로 입력하였다.
3.2
레일조도
본 연구에서 사용한 레일 조도는 측정치에 바탕을 두고 있
m1m20 m2 e··1
∆
e··2⎩ ∆ ⎭
⎨ ⎬
⎧ ⎫ c
s 0 cs– 0
e·1
∆
e·2⎩ ∆ ⎭
⎨ ⎬
⎧ ⎫ k
s 0 ks – –kee1
∆
e2⎩ ∆ ⎭
⎨ ⎬
⎧ ⎫
+ +
m1 – y··
m2 – y··
⎩ ⎭
⎨ ⎬
⎧ ⎫
–m1r··m2 – r··
⎩ ⎭
⎨ ⎬
⎧ ⎫
0 ki⎩ ⎭
–⎨ ⎬ ⎧ ⎫
∆
i+ +
=
y··
r··
e·1
∆ e·2
∆ e··1
∆ e··2
∆ i·
⎩∆ ⎭
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨ ⎬
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎧ ⎫ 0 0 1 0 0
0 0 0 1 0
ks⁄m1+ks⁄m2
( )
– k–e⁄ m2–(cs⁄m1+cs⁄m2) 0 ki⁄m2 ks⁄m2 ke⁄m2 cs⁄m2 0 –ki⁄m2
0 0 0 ke⁄ki–R0⁄L0 e1
∆ e2
∆ e·1
∆ e·2
∆
∆i
⎩ ⎭
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨ ⎬
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎧ ⎫
=
0 0 0 0 1 L⁄ 0
⎩ ⎭
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨ ⎬
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎧ ⎫
∆v 0 0 0 y·· r··– –
⎩ 0 ⎭
⎪ ⎪
⎪ ⎪
⎨ ⎬
⎪ ⎪
⎪ ⎪
⎧ ⎫
+ +
z··=Az Bu Hf t+ +
( )
e1
∆ ∆e2∆e·1∆e·2∆i
[ ]T
표
1. UTM-01의 제원
항 목 값 항목 값
차체질량(m
1)
20,000kg진공중투자율( µ
0)
4π×10-7 H/m보기질량(m
2)
9,300kg전자석코일수(N
m)
6802차현가장치강성(k
s)
451.8kN전자석넓이(A
m)
0.022m22차현가장치감쇠(c
s)
56.28kN/m공칭부상공극(e
20)
0.011m전기저항(R
0)
24.72Ω공칭부상전류(i
0)
21A그림
3.제어 다이어그램
다. 한국기계연구원(KIMM) 자기부상열차 시험선로에서 측정 한 가이드웨이의 고도 정보로부터 측정된 조도는 다음 그림 4 와 같다. 시험선 레일조도는 측정구간 146.8m 및 184.9m에 서 최대 및 최소가 나타나고 변동률은 -3.2mm~+4.1mm이다.
3.3
선로처짐
선로처짐은 미리 정적해석을 통하여 산정한 보기 아래의 교량 변위를 사용하였다. 가이드웨이에 집중이동하중을 재하 한 후 보기 바로 아래의 변위를 구하고, 차량 이동에 따른 속도를 고려하여 보기 바로 아래의 교량의 연직 가속도를 수치미분으로 산정하였다. 해석에 사용한 가이드웨이 교량의 단면은 그림 5와 같이 콘크리트 박스로 가정하였으며 이는
자기부상 시험노선인 한국 기계연구원(KIMM) 자기부상시험 선로의 PSC 박스형 단면의 형상과 유사하다. 이때 단면폭은
1.35m,
웹과 플랜지의 폭은 각각 20cm, 압축강도는 50MPa,
추가하중은 자중의 20%로 가정하였다.
그림 6(a)에서는 경간장이 25m이고 처짐비(L/δ
max)가
2000인 단순보의 보기 하부 연직처짐곡선을 나타내었다. 그 림 6(b)은 단순보와 동일한 휨강성을 가진 3경간 연속보의 처짐곡선을 나타냈다. 그리고 그림 6(c)와 6(d)는 각각 총경 간장 1000m인 단순보와 3경간 연속보를 차량이 주행할 때 보기 하부의 처짐 PSD 함수이다.
그림
4.측정된 레일 조도
그림
5.가이드웨이 교량의 가정 단면
그림
6.차량 보기 하부의 가이드웨이 처짐곡선
(경간장
25m,처짐비
2000)4. 변수에 따른 영향
4.1
검토 변수의 선정
일반적으로 열차의 주행성에 영향을 미치는 변수로는 차량 속도, 레일의 불규칙도(게이지, 레벨, 단차 포함)와 교량의 처짐이 있다(Garg, 1984). 자기부상열차도 비슷한 경향을 보
일 것으로 판단되므로 차량속도, 레일 조도와 가이드웨이 처 짐을 검토 변수로 먼저 선정하였다.
가이드웨이 교량의 구조적 특성도 자기부상열차의 주행성 에 영향을 미칠 수 있다. 예를 들면 단순교와 연속교는 진 입부 꺾임각이 다르고 처짐형상도 다르다. 또한 경간장의 차 이도 영향을 미칠 수 있는 변수이다. 아울러 가이드웨이 교
그림
7.레일조도만을 고려한 차량속도에 따른 차량응답의 시간이력해석 결과
그림
8.레일조도와 속도에 따른 차량 응답의 변화
량의 고유진동수와 차량/교량 질량비와 같은 동특성도 영향 을 줄 수 있다.
이를 정리하면, 자기부상열차의 주행성에 영향을 미칠 가 능성이 있는 변수로 차량속도, 레일 조도, 가이드웨이 교량 처짐, 경간 연속 여부, 경간장을 선택하여 각 변수가 차량의 갭변위나 응답에 미치는 영향을 평가하였다. 해석에서는 자 기부상열차가 그림 3과 같은 능동제어를 받으면서 총 500m 를 주행하는 동안의 응답을 구하였다.
4.2
레일조도 및 차량 속도의 영향
그림 7은 차량속도가 30km/h와 110km/h일 때 구한 차체
-보기의 상대변위(∆e
1),보기-가이드웨이의 상대변위(부상공 극, ∆e
2),제어전압, 그리고 EMS회로의 전류의 변화를 차량 의 이동경로에 따라 그린 것이다. 그림에서 보듯이 차량위치
145m
및 185m 구간에서 응답이 최대가 되는 것을 알 수
있다. 이는 앞서 레일조도의 최대 및 최소 위치와 유사하다.
레일조도와 차량속도에 의한 차량의 응답을 보다 자세히 조사하기 위해서 그림 8에 차량속도에 따른 차량의 최대응 답 및 RMS(Root Mean Square, 평균제곱근)응답을 나타 냈다.
그림 8에서 보듯이 차체-보기의 상대변위는 차량의 속도에 영향을 비교적 적게 받으며, 부상공극의 변화는 저속구간(시 속 80km/h 이하 구간)에 비해서 고속구간에서는 영향이 비 교적 작다. 또한 자기부상열차의 부상제어기의 제어전압은 속도에 비례해서 증가하고 있으며, 입력전류의 경우는 부상 공극의 크기와 입력경향이 거의 일치하는 것으로 나타난다.
4.3
교량 처짐비의 영향
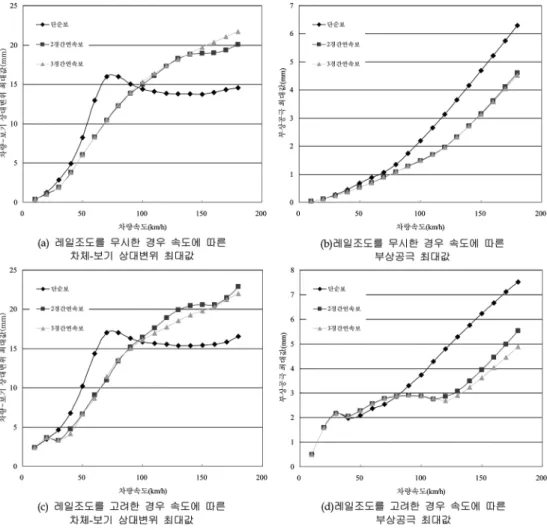
그림 9는 레일조도를 무시한 경우 처짐비 1:1500, 경간장
25m의 선로를 주행하는 차량의 응답이다. 가이드웨이 처짐 이 조화함수와 유사하므로 공극, 차체-보기의 상대변위, 전 류, 전압과 같은 차량 응답도 아주 규칙적인 조화함수의 형 태로 나타났다. 그림 9(b)는 동일한 조건에 그림 4의 레일조 도를 고려한 경우이다. 그림에서 보듯이 레일조도의 영향과 가이드웨이 처짐의 영향이 동시에 고려됨을 알 수 있다.
그림 10은 처짐비에 따른 차량 속도별 차체-보기의 상대변 위 및 부상공극의 응답을 레일조도를 고려한 경우와 고려하 지 않은 경우에 대해서 비교한 것이다. 차체-보기의 상대변 위의 경우 시속 70km/h 근처에서 응답이 크게 발생하고 있 는데 이는 차량 고유주파수와 조화함수로 입력되는 교량과 의 공진에 의한 영향이다. 연직방향으로만 운동하는 본 논문 의 차량 모델의 경우에는 다음 식 (9)와 같이 미리 가정된 교량을 주행시 차량의 공진속도가 계산 가능하다.
(9)
식 (9)에서 V
cr은 차량의 공진속도, Ω
vehicle는 차량의 고유 주파수(Hz)이다. 해석에 사용된 차량의 고유주파수는 다음과 같다.
따라서 차량의 공진속도 V
cr은 식 (9)로부터 다음과 같다.
경간장이 25m인 경우:
한편 부상공극에는 이러한 공진효과가 나타나지 않고 있다.
그림 10(b)와 10(d)를 비교하면 레일조도와 처짐이 동시에 작용할 경우 저속구간에서는 레일조도에 의한 영향이 크게 작용하나 고속구간에서는 교량의 처짐에 지배를 받는 것으 로 나타났다. 부상공극을 줄이기 위해서는 레일조도의 크기 를 줄이고, 처짐비를 줄여 강성을 키워야 하나 현실적으로 레일조도의 경우 인위적으로 줄이는데 한계가 있으며 처짐 비를 줄여 강성을 키울 경우 교량의 경제성과 관련이 된다.
4.4
연속경간의 영향
그림 11에서는 한 경간장이 25m인 가이드웨이가 500m 있을 때 연속교 형식에 따른 차량의 응답값을 보여주고 있 다. 단순보의 경우 처짐비를 1:1500으로 하였고 연속교의 경
Vcr=
Ω
vehicle×
LΩ
vehicle1 2π--- ks
mc
--- 0.75Hz
= =
Vcr=0.75 25
×
=18.75m/s=67.5km/h그림
9.레일조도와 처짐 작용시 차량 응답의 시간이력해석 결과
(V=110km/h)우 단순보와 동일한 단면을 가지는 가이드웨이에 집중이동 하중을 재하한 후 보기 바로 아래의 변위를 구하였다.
레일조도를 무시할 경우 부상공극의 크기가 단경간 > 2경 간연속 > 3경간연속의 순으로 나타났다. 동일한 단면으로 구 성된 교량의 경우 2경간이나 3경간 연속교가 공극을 줄이는 데 유리한 것으로 판단되나 레일조도를 고려할 경우 저속구 간에서는 레일조도의 영향에 지배적이고 고속구간에서는 교 량처짐에 지배적이 됨을 알 수 있다. UTM-01의 설계속도인 시속 110km/h에서는 단순보의 경우 최대 4.3mm의 부상공 극이 발생하나 동일한 단면으로 구성된 2경간연속보 교량의 경우 2.8mm가 발생하여 약 35%정도의 부상공극 감소효과 를 나타냈다.
4.5
경간장의 영향
단순보의 경간장이 25m, 30m, 40m로 달라질 때 차량의 응답량을 그림 12에 나타냈다. 레일조도를 무시한 그림
12(b)
에서 보듯이 부상공극의 크기는 경간장 25m > 30m >
40m
순으로 작은 것으로 나타났다. 하지만 레일조도의 영향 이 고려된다면(그림 12(d)) 저속구간에서는 레일조도의 영향
이 지배적이 되며 시속 약 80km/h 이상에서 경간장의 영향 이 두드러진다. UTM-01의 설계속도 110km/h에서 레일조도 와 경간장의 영향을 고려하면 경간장 25m일 경우 최대
4.3mm
의 부상공극이 발생하고 경간장 30m일 경우 3.5mm
가 발생하여 약 20%정도 줄어드는 것을 알 수 있고 경간 장 40m의 경우에는 경간장 30m의 경우와 크게 차이가 없 는 것으로 나타났다.
따라서 현실적으로 동일한 처짐비를 갖는 장지간의 교량의 경우에는 단면이 커지고 비경제적일 수 있으므로 적절한 경 간장을 선택하기 위해서는 시공성, 경제성을 따져서 파악해 야 할 것으로 판단된다.
한편 그림에서 보듯이 차체-보기의 상대변위가 특정구간에 서 튀는 것을 알 수 있다. 이는 앞서 설명한 차량의 공진속 도에 의한 영향으로 파악된다. 이해를 돕기 위해서 경간장이
30m인 경우와 40m인 경우의 공진속도를 다음과 같이 계산 하였다.
경간장이 30m인 경우:
Vcr=0.75 30
×
=22.5m/s=81km/h그림
10.처짐비에 따른 속도별 차량 응답의 변화
그림
11.속도와 교량의 연속교형식에 따른 차량응답
그림
12.속도와 경간장에 따른 차량응답
경간장이 40m인 경우:
계산된 차량의 공진속도가 그래프의 경향과 거의 일치하는 것을 알 수 있다.
5. 결 론
본 연구에서는 도시지역의 대체 교통수단으로 현재 개발중 인 중저속 자기부상열차용 가이드웨이 교량 설계 기준 작성 을 위한 기초 자료를 확보하기 위하여, 자기 공극의 피드백 을 포함한 2자유도 차량에 대한 운동방정식을 구성하고, 최 적능동제어기법을 적용하여 수치해석을 수행하였다. 매개변 수 연구로 차량 속도, 레일조도, 교량 처짐, 연속 경간의 구 성, 경간장 등과 같은 선로시설물의 특성이 국내에서 개발된
UTM-01
자기부상열차의 주행중 응답에 미치는 영향을 파악
하였다.
해석 결과를 보면, 다른 이동하중과 마찬가지로 자기부상 열차에서도 응답이 최대가 되는 설계속도보다 낮은 공진속 도가 존재하였다. 해석결과 다음과 같은 결론을 얻을 수 있 었다.
1.
차량 부상공극은 저속구간(시속 80km/h 이하)에서는 레일 조도의 영향에 지배적이나 그 이상의 고속구간에서는 교 량의 처짐비에 지배적이다.
2.
차량 부상공극의 크기는 단경간 > 2경간연속 > 3경간연속의 순으로 나타났으며 2경간이상의 교량을 주행시 매우 효과 적인 주행성능을 얻을 수 있다.
3.
경간장이 길수록 차량 부상공극의 크기는 줄어들지만 이 는 시속 80km/h 이상의 고속구간에 한정되며 저속구간에 서는 여전히 레일조도의 영향에 지배된다. 차량 시속
110km/h,
처짐비 1:1500의 단경간 교량을 기준으로 했을
때 25m의 경간장을 가지는 교량에 비해서 30m 경간장을 가지는 교량의 경우 부상공극이 약 20% 줄어들지만 40m 경간장의 교량의 경우는 그 효과가 크지 않다. 경간장이 짧아지면 시공비용이 높은 교각의 설치간격이 줄어들어 비 경제적일수 있고, 경간장이 길어지면 부상공극이 줄어들긴 하나 거더단면이 커질 수 있으므로 또한 비경제적일 수 있다. 따라서 시공성, 경제성 및 주행성을 고려해서 적절 한 경간장을 선택하는 것이 바람직하다.
본 논문은 차량의 단순화된 모델과 가이드웨이와의 동적상 호작용이 고려되지 않은 상태에서 교량의 파라메타에 대한
연구를 수행한 것으로 해석결과는 다소 제한적이다. 따라서 향후 추가할 연구로는 가이드웨이-자기부상열차의 상호작용 을 고려한 동해석, 차량의 정교한 3차원 모델링, 바람 및 지진 등의 환경하중 고려 등이 있다.
참고문헌
정정훈, 한형석, 성호경, 허영철, 김병현(2006) 자기부상열차
UTM01의 궤도 형상에 따른 동특성 해석.
2006한국철도학 회 추계학술발표회 특별세미나
.특별세션, 한국철도학회, pp.
219-227.
한형석, 임봉혁, 이남진, 문석준, 정정훈(2007) 전자석 현가 시스 템의 부상 공극 주파수 응답 해석.
2007년도 한국철도학회 추계학술발표회, 한국철도학회, pp. 912-917.
Cai, Y., Chen, S.S., Rote, D.M., and Coffey, H.T. (1994) Vehicle/
guideway interaction for high speed vehicles on a flexible guide-way. J. of Sound and Vibration, Vol. 175, No. 5, pp. 625- 646.
Dai, H. (2005) Dynamic Behavior of Maglev Vehicle/Guideway System with Control, Ph.D. Dissertation, Case Western Reserve University.
Fang, J., Ardovinsky, A., and Montgomery, D.B. (2004) Dynamic modeling and control of the Magplane vehicle. Maglev2004, Shanghai, China, pp. 935-941.
Garg, V.K. and Dukkipati, R.V. (1984) Dynamics of Railway Vehi- cle Systems, Academic Press.
Hedrick J.K, Ravera R.J, Anderes J.R. (1975) The effects of ele- vated guideway construction tolerances on vehicle ride quality.
J. of Dynamic Systems, Measurement and Control, ASME, Vol. 97, No. 4, pp. 408-416.
Kusagawa, S. et al. (2004) Multipurpose design optimization of EMS-type magnetically levitated vehilce based on genetic algorithm, IEEE Transactions on Applied Superconductivity, Vol. 14, No. 2, pp. 1922-1925.
MATLAB (2004) Control System TOOLBOX, The Math Works Inc.
Morita, M., Iwaya, M., and Fujino, M. (2004) The characteristics of the levitation system of Linimo(HSST system), Maglev2004, Shanghai. pp. 525-532.
Sinha, P.K. (1987) Electromagnetic Suspension Dynamics & Con- trol, Peter Peregrinus, London, U.K.
Soong, T.T. (1990) Active Structural Control: Theory and Practice, Addison-Wesley.
Thornton, R. et al. (2004) MagneMotion Urban Maglev, US DOT.
Zheng, X.J., Wu, J.J., and Zhou, Y.H. (2000) Numerical analysis on dynamic control of five-degree-of-freedom maglev vehicle moving on flexible guideways. J. of Sound and Vibration, Vol.
235, No. 1, pp. 43-61.
(