構 造 工 學
大 韓 土 木 學 會 論 文 集第26卷 第4A 號·2006年 7月 pp. 639 ~ 645
Hybrid FRP Rod의 변형률을 이용한 축방향 변위추정 모형 개발
Development of Estimated Model for Axial Displacement of Hybrid FRP Rod using Strain
곽계환*·성배경**·장화섭***
Kwak, Kae-Hwan · Sung, Bai-Kyung · Jang, Hwa-Sup
···
Abstract
FRP (Fiber Reinforced Polymer) is an excellent new constructional material in resistibility to corrosion, high intensity, resistibility to fatigue, and plasticity. FBG (Fiber Bragg Grating) sensor is widely used at present as a smart sensor due to lots of advantages such as electric resistance, small-sized material, and high durability. However, with insufficiency of mea- suring displacement, FBG sensor is used only as a sensor measuring physical properties like strain or temperature. In this study, FRP and FBG sensors are to be hybridized, which could lead to the development of a smart FRP rod. Moreover, developing the estimated model for deflection with neural network method, with the data measured through FBG sensor, could make conquest of a disadvantage of FBG sensor - uniquely used for sensing strain. Artificial neural network is MLP (Multi-layer perceptron), trained within error rate of 0.001. Nonlinear object function and back-propagation algorithm is applied to training and this model is verified with the measured axial displacement through UTM and the estimated numer- ical values.
Keywords : hybrid, FRP, neural network, back-propagation, fiber bragg grating sensor
···
요 지
FRP(Fiber Reinforced Polymer)
는 부식의 저항성
,고강도
,피로저항 능력 및 성형성 등에서 우수한 건설 신소재이다
.광 섬유 브래그 격자
(Fiber Bragg Grating; FBG)센서는 전자기 저항
,작은 소재의 크기
,그리고 높은 내구성 등의 이점으로
smart sensor
로서 현재 많이 사용되고 있다
.하지만
FBG센서의 변위 측정 기술 능력의 부족으로 현재까지는 변형률
,온도 등의 물리량 측정센서로서 활용되고 있는 실정이다
.본 연구에서는
FRP와
FBG센서의 기능 복합화
(Hybrid)를 통하여
smart FRP Rod를 개발 한 후 인장시험을 실시하였다
.또한
, FBG센서에 의해 측정된 변형률 데이터를 신경망
(Neural Network)기법을 이용하여 변위 추정 모형을 개발함으로서
FBG센서 단점인 변형률 계측만을 위한 센싱 역할을 극복하고자 한다
.인공신경망 모형은
MLP(Multi-layer Perceptron)로
,오차범위
0.001에 수렴 될 수 있도록 학습
(training)을 실시하였다
.학습 에는 비선형 목적함수와 역전파 학습
(Back-propagation)알고리즘을 적용하였으며 모형의 검증은
UTM에서 측정된 변위 값 과 수치해석에 의한 결과 값을 비교함으로서 실시하였다
.핵심용어 :
Hybrid, FRP,신경망
,역전파
,광섬유 브래그 격자센서
···
1. 서 론
FRP(Fiber Reinforced Polymer) 는 부식의 저항성 , 고강도 ,
피로저항 능력 및 성형성 등에서 우수한 건설 신소재로서 인장거동에서 파괴시까지는 선형적 탄성 - 응력 변형률 관계를 나타내고 있다 (Z. Zhou, J. P. and B. Wang, 2005). 광섬유 브래그 격자 (Fiber Bragg Grating; FBG) 센서는 전자기 저 항 , 작은 소재의 크기 그리고 높은 내구성 등의 이점으로
스마트 센서로서 현재 많이 사용되고 있다 ( 김기수 , 2002).
두 재료의 이러한 장점으로 인하여 두 재료의 복합화
(Hybrid) 를 통하여 새로운 smart 재료로 활용하려는 연구가
현재 활발히 진행되고 있다 . Abdeldjelil Belarbi(2001) 는 취 성적인 FRP 의 단점을 개선한 연성적 FRP-rebar 에 FBG 센서
를 부착하여 실험을 실시한 후 FBG 센서의 건전도 모니터
링 능력을 검증하였다 . Z. Zhou(2005) 는 GFRP, CFRP 에
FBG 센서를 부착하여 보를 제작한 후 정적시험을 실시하여
LVDT 와의 계측 값을 비교하였다 .
FBG 센서의 많은 장점에도 불구하고 실험에 중요한 변수인
변위의 측정이 현재까지의 기술에서는 그 한계점에 직면해 있다 .
이에 본 연구에서는 FRP 와 FBG 센서를 복합화 하여
smart HFRP Rod 를 국내기술로 제작 한 후 인장시험을 실
*
정회원·원광대학교토목환경,
도시공학부교수ㆍ주저자(E-mail : [email protected]) **
원광대학교토목환경공학과박사과정***
정회원·원광대학교토목환경공학과박사과정시하였다 . 또한 , FBG 센서의 의해 계측된 변형률 데이터를 신경망 (Neural Network) 기법을 이용하여 축방향 변위 추정 모형을 개발함으로서 FBG 센서의 단점인 변형률 계측만을 위한 센싱 역할을 극복하고자 하였다 . HFRP Rod 시편은 총 4 개를 제작하여 실험을 실시하였으며 , 그 중 2 번째 시편 이 실험시 오류로 인하여 모형 추정의 자료로는 활용을 할 수 없었다 . 나머지 HFRP Rod 시편 중 Rod 1, 3 번째 시 편을 모형추정을 위한 학습 자료로 Rod 4 번을 개발된 모형 의 검증자료로 활용하였다 .
측정된 FBG 센서의 변형률을 독립변수 (independent) 로 ,
축방향 변위를 종속변수 (dependent) 로 선정하고 다양한 학습
변수 ( 은닉층수 , 은닉마디 , 오차범위 등 ) 로 학습을 수행한 후 최적의 신경망 모형을 추정하였다 . 결론적으로 , 최적의 신경 망 모형으로 MLP(Multi-layer Perceptron) 로 추정되었다 . 이
MLP 모형의 학습알고리즘은 현재 공학적으로 가장 많이 사 용되고 있는 역전파 학습 알고리즘 (Back-Propagation) 을 적 용하였으며 , 이때 오차범위는 0.001, 초기 모멘텀은 0.9 를 적용하였다 .
즉 , 본 연구에서는 컴퓨터에 의한 학습 및 시뮬레이션을
통해 FBG 센서에 의해 계측된 변형률 데이터를 이용하여
smart HFRP Rod 의 축방향 변위를 추정할 수 있는 모형을
개발하였다 . 이렇게 개발된 모형을 적용하여 FRP 의 Health
monitoring 능력을 검증할 수 있는 자료의 초석으로 활용되
고자 한다 .
2. 신경망 모형(Neural Networks)에 대한 이론적 고찰
2.1 신경망 이론
신경망 모형 (Neural Network) 은 신경 생리학 분야에서
두뇌의 활동을 이해하고자 하는 목적으로 신경의 작업을 설명하려는 시도에서 출발하였다 . 그림 1 에 도식적으로 나 타낸 바와 같이 생물학적인 프로세스를 컴퓨터를 이용하 여 모형화 하려는 노력에서 비롯된 것으로 인간 두뇌의 신경망을 흉내내어 실제 자신이 가진 데이터로부터의 반 복적인 학습 과정을 거쳐 데이터에 숨어 있는 패턴을 찾 아내는 모델링 (Modeling) 기법이다 . 특히 , 신경망 모형은 매우 복잡한 구조를 가진 방대한 데이터 사이의 연관 관 계나 패턴을 찾아내고 이를 이용하여 향후 예측하는 경우 에 유용하다 .
2.2 Neural Network 의 종류
신경망에는 여러 가지 다양한 모형이 있으나 , 그중에서도 자
료 분석을 위해 가장 널리 쓰이는 모형은 MLP(Multilayer
Perceptron, 다층인식자 ) 신경망이다 . 그 외에도 MLP 에 비해 서 그다지 자주 사용되지는 않지만 RFB(Radial Basis Function, 원형기준함수 ), EBF(Elliptical Basis Function, 타 원형기준함수 ) 가 있다 . 본 연구에서는 그림 2 의 MLP 모형 을 사용하여 변위 추정 모형을 개발하고자 한다 .
2.3 학습 알고리즘
목적함수를 최적화하는 방법으로는 역전파 (Back-propagation),
레벤버그 - 마퀴르트 (Levenberg-Marquardt), 준 뉴턴 (Quasi-ne wton), 결합기울기 (Conjugate gradient) 와 같은 다양한 알고 리즘 중 가장 간단하고 널리 쓰이는 역전파 알고리즘을 본 연구에 적용하였으며 , 역전파학습 알고리즘을 단계별로 정리 하면 다음과 같다 .
단계 1 : 가중치 ( W
ki, W
ji), 바이어스 (
θj,
θk), 학습률 (
η)
및 모멘텀 (
α) 값의 초기값을 설정한다 .
단계 2 : 출력층에서의 일반화된 오차 (
δk) 를 계산한다 .
단계 3 : 은닉층과 출력층 사이의 가중값을 다음의 식에
의해 학습한다 .
여기서 , k는 반복단계 ,
η는 학습율 ,
α는 모멘텀 , y
i는 은닉 층의 출력값을 의미한다 .
단계 4 : 은닉층에서의 일반화된 오차 (
δj) 를 계산한다 .
단계 5 : 출력층과 은닉층 사이의 가중값을 학습한다 .
단계 6 : 오차함수를 체크하여 주어진 목표값에 미달하면
단계 1~5 를 반복한다 .
3. HFRP Rod 시험체 제작 및 인장실험
3.1 실험체 제작
FRP 보강근은 철근을 대체하는 재료로써 성능뿐만 아니라
비용의 문제를 고려하여 GFRP(Glass Fiber Reinforced Plastic) 를 기본으로 하였다 .
그림 3 은 개발된 HFRP(Hybrid Fiber Reinforced Polymer)
W
kj( k 1 + )
∆ =
ηδky
i+
αW
kj( ) k
δj
= y
j( 1 y –
j) δ
∑ kW
kjW k 1 ( + )
∆ =
ηδjx
i+
αW
ji( ) k
그림 1. 뉴런의 형상
그림 2. 다층퍼셉트론 구조
Rod의 상세도를, 그림 4에는 HFRP Rod의 제작 과정 개요 도를 나타내고 있다. HFRP Rod는 철근에 비해 약 10배 이상의 강도를 보유한 복합체이다. 이것은 구조적 모체 역할 을 하는 FRP내에 FBG Sensor를 인발성형시 함께 부착하 여 FRP와 일체거동을 이루도록 하였으며, Rib와 FRP에 의 해 보호되고 있다. 또한 FRP표면의 Rib는 구조물간의 부착 성능을 확보하기 위해 미세섬유인 Milled Fiber로 제작된 인공의 Rib를 사용하였으며 최종 완성된 Rod를 그림 5에 나타내었다.
3.2 인장실험 방법
FRP의 인장실험은 철근과 달리 매우 어렵다. 따라서 본 실험에서는 인장시험시 grip부에서 발생하는 응력집중을 피
하기 위하여 시험편의 양단에 유리섬유를 길이 방향의 수직 으로 감아서 탭(tap)을 형성한 후 선반으로 테이퍼(tapper)가 공을 하여 시험편의 grip부분과 형상을 같게 하였다. 인장시 험은 만능재료시험기(UTM) 를 사용하여 변위제어 하였으며, 실험기로부터 자동으로 획득한 결과와 FBG센서 장비로 입 력된 신호를 통한 실험결과와 비교 평가하였다. 그림 6, 그 림 7에 FBG센서에 의해 계측된 변형률 데이터 수집장비와 인장실험 광경을 나타내고 있다.
그림 3. 개발된 HFRP 단면
그림 4. HFRP Rod 제작 개요도
표 1. HFRP Rod 의 물성치
제조사 표면형태 사용재료 직경
Fiber Vol.Fraction(%)
DS
사
DR(Deformed Rod) Glass Fiber 9mm 50
그림 5. Hybrid FRP Rod의 시험체
그림 6. 실험 장비 및 계측장비
그림 7. 실험 광경
4. 인장실험 결과 및 분석
총 4 개의 HFRP 시편을 제작하여 인장특성 시험을 실시
한 결과를 표 2 에 정리하였으며 , 그림 8-11 에는 하중과 변 형률 관계를 그림 12 에는 하중과 축방향 변위 관계를 나타 내었다 .
HFRP Rod 1 시편의 경우 ( 그림 8), 13881 kN 까지 선형 적 증가 추세를 나타내고 있으나 tapper 부분의 sliding 현
상으로 HFRP Rod 의 항복까지는 실험을 실시하지는 못하였
다 . 이때의 UTM 의 최대변형률은 4215.112, FBG 센서의 최 대변형률은 4216, 최대 축방향 변위는 5.138 mm 이었다 . HFRP Rod 2 시편의 경우 ( 그림 9), 인장 실험 시 기계조작 의 실수로 인하여 정확한 변형률 값과 변위 값을 측정할 수
없었으나 UTM 에 의해 측정된 변형률 값과 FBG 센서에
의해 측정된 변형률 값이 잘 일치하고 있음을 확인 할 수 있었다 . HFRP Rod 3 시편의 경우 ( 그림 10) 에는 19894.1
kN 까지는 정확한 실험이 이루어 졌으나 , 이후에는 역시
sliding 현상으로 더 이상의 실험은 진행할 수가 없었으며
이때의 UTM, FBG 센서의 최대변형률 값은 각각 8009.2, 8501, 최대 축방향 변위 값은 5.824 mm 로 측정되었다 . HFRP Rod 4 시편은 ( 그림 11) 최대하중 18897 kN 까지 실험이 이루어 졌으며 , 이때의 최대변형률 값은 6280.5, 6267, 최대 축방향 변위 값은 5.65 4mm 이었다 .
본 연구의 목적은 FRP 의 FBG 센서를 이용한 Health monitoring 의 능력으로서 , 비록 FRP 의 높은 인장강도로 인 하여 파괴거동까지의 실험은 실시하지 못하였으나 , UTM 에
의해 계측된 변형률 값과 FBG 센서에 의해 계측된 변형률
값의 오차율이 최소 0.02%, 최대 6.14% 로 거의 일치하고 있
어 smart 재료로서 검증할 수 있었다 . 부가적으로 추후
FRP Rod 의 인장시험을 위한 특수 장비가 개발되어야 할
것으로 판단된다 .
그림 8. HFRP Rod 1 하중-변형률 관계
그림 9. HFRP Rod 2 하중-변형률 관계
그림 10. HFRP Rod 3 하중-변형률 관계
그림 11. HFRP Rod 4 하중-변형률 관계
그림 12. 하중과 변위관계 표 2. HFRP Rod의 인장시험 결과
구 분 최대하중
(kN)변형률
(UTM)최대
변형률 최대
(FBG)
최대변위
(mm)비 고
HFRP 1 13881 4215.112 4216 5.138 Sliding HFRP 2 7013.2 3740.01 3730 2.356 Error HFRP 3 19894.1 8009.2 8501 5.824 SlidingHFRP 4 18897 6280.5 6267 5.654 Sliding
5. 변위 추정을 위한 신경망 모형의 구성
5.1 최적의 신경망 모형 구성
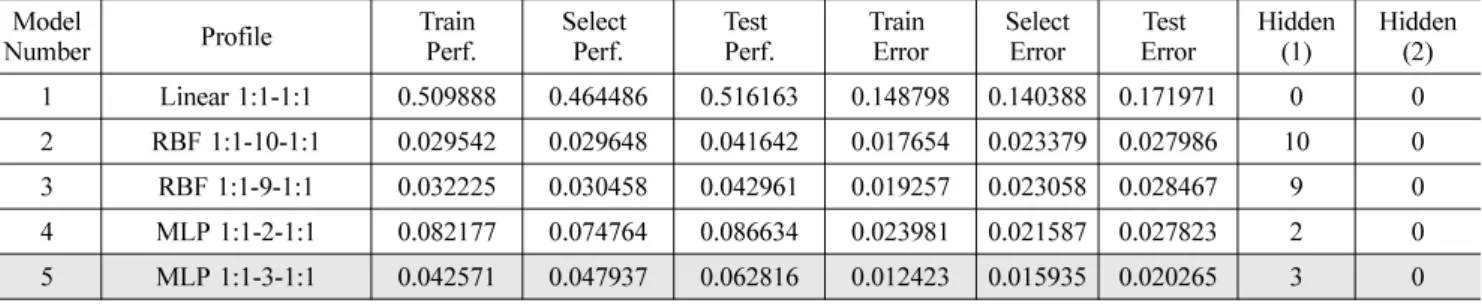
FBG 센서에 의해 계측된 변형률 값의 정확성이 검증된바 이에 최적의 신경망 모형을 구성하기 위하여 주어진 HFRP Rod1, 3시편의 인장 실험시 FBG 센서에 의해 측정된 변형 률 값을 입력층, 축방향 변위 값을 출력층으로 하여 모형을 구성하였다. 또한, HFRP Rod 4의 변형률과 축방향 변위는 검증자료로 활용하였다. 최적의 신경망 모형을 개발하기 위 하여 선형모형, 확률통계모형, MLP모형을 가지고 은닉층과 은닉마디를 변경하면서 학습을 수행한 결과의 분석값이 표 3, 그림 13에 나타내었다.
그림 13에서 x축의 Expt. deflection 값은 인장 시험시 계측된 축방향 변위 값을, y축의 Pred. deflection 값은 다 양한 모형에 의해 추정된 축방향 변위 값을 나타내고 있다.
분석결과 MLP(Multi-layer Perce ptron)이 주어진 변형률과
축방향 변위와의 관계분석에 가장 적합한 것으로 조사되었 다. 따라서, MLP 모형으로 주어진 변수에 대한 오차율 0.001을 수렴 할 수 있도록 충분한 학습을 하였고, 역전파 학습 알고리즘을 적용하였으며 목적함수는 비선형 함수를 사 용하였다.
추정된 MLP 모형의 순서도를 도식적으로 나타내면 그림 14와 같다. 첫 번째 layer층에 FBG센서에서 계측된 변형률 값을 입력하고, 은닉층에서의 축방향 변위추정을 통하여 세 번째 layer층에서 추정된 축방향 변위 값을 나타내게 된다.
순서도의 순서에 따라 학습을 수행한 결과 MLP 모형에 의하여 추정된 변위 값과 실험에 의하여 측정된 변위 값의 상관계수가 R
2=0.9816, 수정 상관계수
ρ2=0.9815로 비교적 높게 분석되었다.
5.2 모형 검증
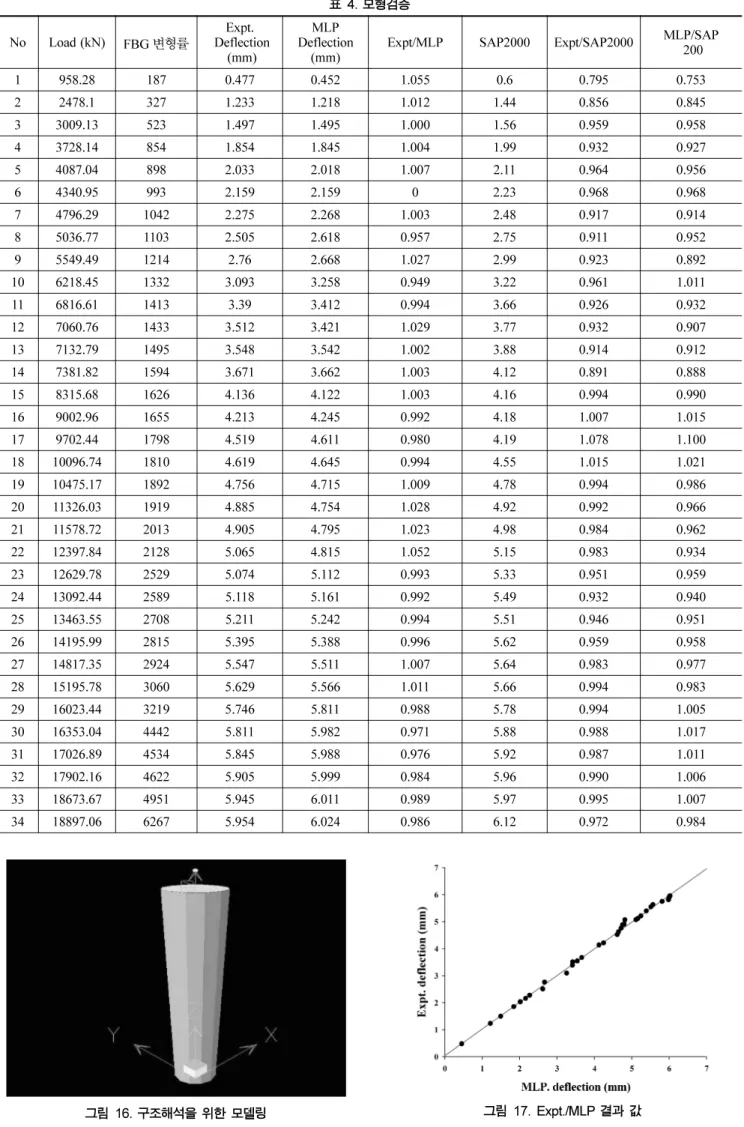
개발된 MLP 모형의 검증은 HFRP Rod 4의 인장실험에 서 측정된 변형률 값과 축방향 변위 값을 이용하였다. MLP 모형의 입력층 변형률 값을 input한 후 MLP 모형에 의해 output된 변위 값과 실 실험에서 측정된 변위 값을 비교함을 실시하였다. 또한, 구조해석 프로그램인 SAP 2000을 이용하 여 해석한 결과 값과도 비교하였다.
표 4에 나타난 바와 같이 MLP 모형에 의해 추정된 축방 향 변위 값과 실험에 의해 측정된 변위 값이 거의 일치하고 있음을 확인할 수 있었으며, 구조해석을 통하여 구한 축방향 변위 값과도 잘 일치하고 있었다.
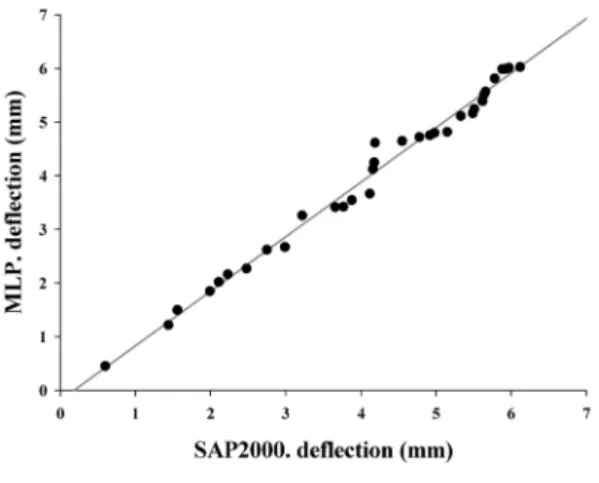
모형 검증 결과을 그림 17, 19에 나타냈다. 이 결과 MLP 모형에 의하여 추정된 변위값과 실험에 의해 계측된 변위 값과는 상관계수 R
2=0.997, 수정 상관계수
ρ=0.997로 표 3. 최적의 신경망 모형 개발을 위한 분석 결과 값
Model
Number Profile Train
Perf. Select
Perf. Test
Perf. Train
Error Select
Error Test
Error Hidden
(1) Hidden (2)
1 Linear 1:1-1:1 0.509888 0.464486 0.516163 0.148798 0.140388 0.171971 0 0
2 RBF 1:1-10-1:1 0.029542 0.029648 0.041642 0.017654 0.023379 0.027986 10 0
3 RBF 1:1-9-1:1 0.032225 0.030458 0.042961 0.019257 0.023058 0.028467 9 0
4 MLP 1:1-2-1:1 0.082177 0.074764 0.086634 0.023981 0.021587 0.027823 2 0
5 MLP 1:1-3-1:1 0.042571 0.047937 0.062816 0.012423 0.015935 0.020265 3 0
주
) Profile : <type> <input> : <layer1>-<layer2>-<layer3> : <outputs>, Train Perf./Select Perf./Test Perf. : Train, Select, Test수행횟수
그림 13. 모형 추정 값과 실험값 비교
그림 14. 개발된 MLP 모형의 흐름도
그림 15. MLP 모형 추정 값과 실험 계측값 비교
표 4. 모형검증
No Load (kN) FBG
변형률
Expt.Deflection (mm)
DeflectionMLP
(mm) Expt/MLP SAP2000 Expt/SAP2000 MLP/SAP
200
1 958.28 187 0.477 0.452 1.055 0.6 0.795 0.753
2 2478.1 327 1.233 1.218 1.012 1.44 0.856 0.845
3 3009.13 523 1.497 1.495 1.000 1.56 0.959 0.958
4 3728.14 854 1.854 1.845 1.004 1.99 0.932 0.927
5 4087.04 898 2.033 2.018 1.007 2.11 0.964 0.956
6 4340.95 993 2.159 2.159 0 2.23 0.968 0.968
7 4796.29 1042 2.275 2.268 1.003 2.48 0.917 0.914
8 5036.77 1103 2.505 2.618 0.957 2.75 0.911 0.952
9 5549.49 1214 2.76 2.668 1.027 2.99 0.923 0.892
10 6218.45 1332 3.093 3.258 0.949 3.22 0.961 1.011
11 6816.61 1413 3.39 3.412 0.994 3.66 0.926 0.932
12 7060.76 1433 3.512 3.421 1.029 3.77 0.932 0.907
13 7132.79 1495 3.548 3.542 1.002 3.88 0.914 0.912
14 7381.82 1594 3.671 3.662 1.003 4.12 0.891 0.888
15 8315.68 1626 4.136 4.122 1.003 4.16 0.994 0.990
16 9002.96 1655 4.213 4.245 0.992 4.18 1.007 1.015
17 9702.44 1798 4.519 4.611 0.980 4.19 1.078 1.100
18 10096.74 1810 4.619 4.645 0.994 4.55 1.015 1.021
19 10475.17 1892 4.756 4.715 1.009 4.78 0.994 0.986
20 11326.03 1919 4.885 4.754 1.028 4.92 0.992 0.966
21 11578.72 2013 4.905 4.795 1.023 4.98 0.984 0.962
22 12397.84 2128 5.065 4.815 1.052 5.15 0.983 0.934
23 12629.78 2529 5.074 5.112 0.993 5.33 0.951 0.959
24 13092.44 2589 5.118 5.161 0.992 5.49 0.932 0.940
25 13463.55 2708 5.211 5.242 0.994 5.51 0.946 0.951
26 14195.99 2815 5.395 5.388 0.996 5.62 0.959 0.958
27 14817.35 2924 5.547 5.511 1.007 5.64 0.983 0.977
28 15195.78 3060 5.629 5.566 1.011 5.66 0.994 0.983
29 16023.44 3219 5.746 5.811 0.988 5.78 0.994 1.005
30 16353.04 4442 5.811 5.982 0.971 5.88 0.988 1.017
31 17026.89 4534 5.845 5.988 0.976 5.92 0.987 1.011
32 17902.16 4622 5.905 5.999 0.984 5.96 0.990 1.006
33 18673.67 4951 5.945 6.011 0.989 5.97 0.995 1.007
34 18897.06 6267 5.954 6.024 0.986 6.12 0.972 0.984
그림 16. 구조해석을 위한 모델링 그림 17. Expt./MLP 결과 값
잘 일치하고 있었다. 또한, 구조해석에 의하여 구한 변위 값 과도 상관계수 R
2=0.985, 수정 상관계수
ρ=0.984로 잘 일 치하고 있음을 확인할 수 있어 본 연구에서 개발한 MLP 모형의 신뢰성을 검증하였다.
6. 결 론
본 연구는 HFRP Rod를 특수 제작하여 인장실험을 실시 하여 FBG 센서와 전기저항식 센서의 하중과 변형률 관계를 분석함으로서 FBG 센서의 정확성을 입증하였다. 또한, FBG 센서에 의해 측정된 변형률을 이용한 축방향 변위 추정을 신경망 이론을 적용하여 모형을 개발하여 다음과 같은 결론 을 얻었다.
1. Hybrid FRP Rod를 이용한 축방향 변위추정에 관한 모 형을 개발하였다. 모형개발은 MLP 모형으로 학습에서 오 차0.001에 수렴 할 수 있도록 training 시켰으며, 학습알고 리즘은 역전파 학습알고리즘을 적용하였다. 처음 모멘트텀 은 0.9를 적용하고 목적함수는 비선형 함수를 사용하였다.
2. 신경망 학습에 필요한 독립변수인 변형률과 종속변수인 축방향 변위를 가지고 다양한 학습조건을 가지고 학습을 수행한 결과 가장 적합한 모형은 1개의 은닉층(Hidden layer)와 3개의 은닉마디(Hidden Unit)를 가지고 있는 MLP(Multi-layer Percertron)으로 추정되었다.
3. 모형 검증 결과 MLP 모형에 의하여 추정된 변위 값과
실험에 의해 계측된 변위 값과는 상관계수 R
2=0.997, 수 정 상관 계수
ρ=0.997로 잘 일치하고 있었다.
4. HFRP Rod 의 시험체 제작시 FRP와 FBG 센서의 부착 시 온도의 영향으로 FBG 센서의 파손 및 손상이 발생하 므로 유의하여 제작을 해야 한다.
5. 총 4개의 HFRP Rod 시험체를 개발하여 인장실험을 실 시한 결과 3개의 시편에서 tapper 부분의 sliding 현상으 로 항복점까지는 실험을 할 수 없었으나, FBG 센서와 UTM에 의해 측정된 변형률 값이 비교적 잘 일치하고 있 었다. 추후, FRP의 높은 인장응력에 맞는 인장실험 방법 이 개발 될 필요가 있다고 사료된다.
감사의 글
본 연구는 한국건설교통기술평가연구원 지정 R&D(03-산 학연 A02-04)연구비와 2005년도 원광대학교 교비 지원에 의해 연구되었습니다.
참고문헌
김기수
(2002)광섬유 센서를 이용한 첨단 계측 시스템
,한국전산 구조공학회
, Vol. 16, No. 2, p.p. 445-452.김인수
,이종헌
,양동석
,박선규
(2002)신경망을 이용한 콘크리트 배합요소 및 압축강도 추정
,한국콘크리트학회 논문집
,한국 콘크리트학회
, Vol. 14, No. 4, pp. 457-466.심종성
,김규선
(2000)건설분야에서의
FRP의 활용
,한국콘크리트
학회지, 한국콘크리트학회
,제
12권
6호
, pp. 37-43.정환진
(1996)신경망을 이용한 구조물의 손상평가
,석사학위논문
,한국과학기술원
.Abdeldjelil Belarbi, Steve E Watkins., and K Chandrashekhara, (2001) Smart fiber-reinforced polymer rods featuring improved ductility and health monitoring capabilities, Smart Mater.
Struct. 10, pp. 427-431.
Maculloch, W. and Pitts, W. (1943) A logical calaulus of the ideas immanent, Bulletin of Mathematical Biophysis 5, pp
.
115-133.Zhou, Z. Ou, J.P., and Wang, B. (2005) Smart FRP-OFGB bars and their application in reinforced concrete beams, smart structures and materials 2005: smart structures and Integrated systems, proceedings of the SPIE, Vol. 5765, pp
.
668-677.(