using Robotic Applanation Tonometry Sensor
Young-Min Kim1,+
Abstract
In this paper, a novel measurement method of radial artery pulse waveform using robotic applanation tonometry (RAT) was present to reduce the errors by the pressing direction of the vessel. The RAT consisted of an array of pressure sensors and 2-axis tilt sensor, which was attached to the universal joint with a linear spring and five-DOF robotic manipulator with a one-axis force sensor. Using the RAT mechanism, the pulse sensor could be manipulated to perpendicularly pressurize the radial artery. A pilot experimental result showed that the proposed mechanism could find the optimal pressurization angles of the pulse sensor within ±3°standard deviations.
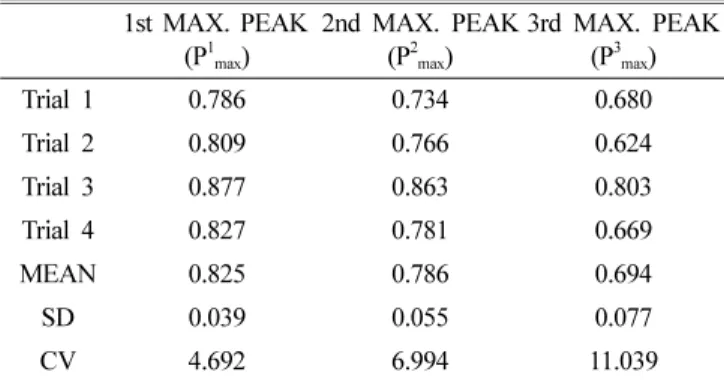
Coefficient values of variation of maximum pulse peaks extracted from the pulse waveforms were 4.692, 6.994, and 11.039 % for three channels with the highest magnitudes. It is expected that the proposed method can be helpful to develop more precise tonometry system measuring the pulse waveform on the radial artery.
Keywords: Robotic applanation tonometry, Radial artery, Precise pulse measurement, Perpendicular pressurization
1. 서 론
토노메트리 방식을 이용한 요골동맥의 맥파 측정은 심혈관계 의 위험도를 예측하는데 유의미한 정보를 제공한다[1-2]. 특히, 한의학에서는 환자의 기혈 상태를 판별하고 변증하는데 맥진을 주요 진단요소로 활용하고 있다[3]. 최근에는 U-healthcare 시스 템과 통합의학의 융합 연구 분야에서 맥측정의 활용도가 높아 지고 있다.
맥파 측정의 정확도를 저해하는 주요 요인 중 하나는 맥센서 가 요골 동맥을 정확한 각도로 압박하지 못하는 것이다. 정창진 연구진[4]은 맥센서가 혈류 진행방향에 수직으로 압박하지 못하 고 ±6도 이상 벗어나면, 맥파의 주요 특징인 최대압맥파 측정
시 두 배 이상의 오차가 생기는 것을 실험을 통해 확인하였다.
전민호 연구진[5]은 혈관 방향과 센서의 정렬 방향과의 차이가 맥파 변동성을 증가시킨다고 보고하였다.
따라서, 맥센서가 피부와 요골 사이에 놓인 혈관의 위치를 정 확하게 찾아 혈류 진행 방향의 수직 방향으로 가압하여 맥파를 읽어내는 것이 중요하다. 그러나, 기존의 펜타입형 토노미터는 조작자의 훈련 정도에 따라 정교한 가압 각도 조절이 어려워 재 현성 저하의 문제가 보고되고 있다[6]. 또한, 일반적인 커프 기 반의 가압 방식은 공압 제어를 이용한 1 자유도 구동 방식이기 때문에 정확한 가압 위치(3자유도)와 방향(2자유도) 제어에 필 요한 5자유도 이상의 구동 조건을 만족하지 못한다.
본 논문에서는 로봇 매니퓰레이터를 이용해 맥센서의 혈관 가 압 각도를 정밀제어하는 방법을 소개하고 인체에서의 파일럿 측 정을 통해 실현 가능성을 타진해보았다.
2. 로보틱 토노메트리 센서 시스템
2.1 전체 시스템
Fig 1에서 보듯이 로보틱 토노메트리 센서 시스템은 크게 여 섯 개의 주요 컴포넌트(압저항형 맥센서, 2축 기울기 측정 센 서, 스프링-유니버설조인트, 5축 가압 로봇 매니퓰레이터, 1축
한국한의학연구원 한의기반연구부 (KM Fundamental Research Division,Korea Institute of Oriental Medicine (KIOM))
KM Fundamental Research Division, Korea Institute of Oriental Medicine (KIOM), 1672 Yuseongdaero, Yuseong-Gu, Deajeon, 305-811, Republic of Korea
+Corresponding author: [email protected]
(Received: Feb. 13, 2016, Revised: Mar. 28, 2016, Accepted: Mar. 29, 2016)
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/
licenses/bync/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
정밀 가압 모터, 1축 힘센서)로 구성된다.
압저항형 맥센서는 맥 파형을 측정하기 위해 반도체 압저항 형 센서 (C33, 절대압방식, EPCOS, Germany) 6개를 일렬로 배 열하고 외부 압력에 저항하기 위해 센서의 표면을 코팅한 구조 로 Fig. 2(a)과 같이 제작하였다[4]. 맥 측정 시의 중력 방향에 대한 센서 기울기는 2축 기울기 센서를 (SCA100T-D01, Murata Manufacturing Co., Japan) 통해 측정하였고 Fig. 2(b) 처럼 맥 센서 후면에 일체형으로 부착하였다. 2축 기울기 측정 조인트는 맥센서가 피부층에 기울어져 가압될 때 발생하는 각도 변화에 순응하여 움직이고 센서가 피부에서 떨어지면 원위치로 복귀될 수 있도록 2축 유니버셜 조인트와 스프링으로 구성되어 있다.
Fig. 2(c) 는 기울기 측정 조인트부의 구조를 보여주고, Fig 2(d) 는 센서의 입사각도 변화시 피부층의 저항력에 의해 발생하는 조인트의 움직임 예를 보여준다. 로보틱 가압 매니퓰레이터는 맥센서가 가압 각도를 자유롭게 제어할 수 있도록 5축(3축 선 형이송, 2축 회전이송)의 모터 시스템으로 구성되고, 최적의 가 압 각도를 찾은 후에 안정적으로 미세 가압력을 제어할 수 있 Fig. 1. Overall description of robotic tonometry sensor system
Fig. 2. Structure of tonometry sensors for measurement of the radial artery pulse. (a) Frontal view of array structure of piezo-resis- tive sensors. (b) Side view of the pressure sensor and location of inclinometer. (c) The sensor mounted on the end-effector of the robot. (d) Working mechanism of the spring-universal joint when the sensor contacts on the skin.
Fig. 3. Coordinate description for kinematics and inverse kinematics
solution of RAT system
위한 정기구학 및 역기구학 문제는 이 구동좌표계를 기반으로 DH 파라미터를 정의한 후 동차 변환 행렬 관계식을 통해 구했다[7].
2.2 센서 신호 전처리
측정된 압저항형 센서의 신호는 맥파형의 특성을 고려하여 설 계된 아날로그 회로를 통해 0.1-30Hz의 차단주파수로 밴드패스 필터링하였고, 16배 전처리 증폭 후 필터 후단에서48배 증폭하 여 최적의 신호를 획득하였다. 6채널 맥 측정 신호와 2축 기울 기 신호는 아날로그디지털 변환기(NIUSB-6218, National Instruments, USA)를 통해 1kHz의 sampling rate(SR)로 저장하 여 분석에 활용하였다[4]. 2축 기울기 센서 신호는 0 Hz 정밀도 성능을 보장하도록 2차 Butterworth 필터를 이용해 3Hz Cutoff 이하로 저역통과시켰다. 구현된 기울기 센서의 측정 분해능은
±0.1도 이하로 구현된 시스템의 가압 기울기 제어 범위인 ±18 도를 180분해능으로 제어할 수 있는 성능이다. 힘센서 신호 역 시 NIUSB-6218을 이용해 1KHz SR 로 획득하였고, 최대500gf 까지 ±1%의 비선형성 성능으로 측정할 수 있어 맥센서가 피부 에 닿는 시점을 ±5gf의 오차 범위에서 파악할 수 있다.
2.3 정밀 맥파 측정 방법
인체마다 요골의 구조, 혈관의 두께, 피부조직의 기계적 특성 및 요골동맥을 둘러싼 조직(힘줄, 근육)등의 기하적 구조가 다 르다. 이로 인해, 요골 동맥 주변부의 기계적 특성을 해석적으 로 모델링하는 것은 요원하다. 본 연구에서는 로봇 끝단의 미세 한 반복적 움직임을 통해 맥센서의 기울어짐을 측정하고 이를 비교분석하여 최적의 가압각도를 유추하는 방법을 고안하였다.
Fig 4에서 보듯이 10단계의 주요 과정을 거쳐 정확한 혈관 가 압 방향을 찾게 된다.
Step 1 ( 준비단계) : 오퍼레이터는 검지손가락 끝을 이용해 피 험자의 맥동 위치를 찾고, 맥센서 끝단에 부착된 레이저 포인터 마커를 맥동 위치에 오도록 위치시킨다.
Step 2 ( 이송단계) : 맥센서와 레이저 포인터 마커의 상대위치 를 계산하여 맥센서 중심(좌표축 6의 중심)이 맥동에 위치하도 록 매니퓰레이터를 선형이송시킨다.
Step 3 ( 가압 초기화 단계) : 맥센서가 피부에 닿을 때까지 (Fz 6 >10gf) 매니퓰레이터를 –x 6 축 방향으로 선형이송시킨다.
Step 4 ( 가압 방향 계산 단계) : 가압 초기화 위치에서 맥센서 중심을 D + 과 D - 로 이동시켜 그 때의 기울기 변화량 (α + - α - ) 과 (β + -β - )을 계산한다.
Step 5 (수렴 조건 단계) : 맥센서면의 수직방향(z e 축)과 피부 층을 포함한 요골동맥의 지지면(Fig 5에서 L-T축으로 이루어진 면)이 이루는 방향이 수직을 이룬다면(z e 축과 V축이 일치) 기울 기 변화량은 0으로 수렴한다고 가정한다. 이와 같은 가정에 기 반해 기울기 변화량이 오차 범위 이내에 머무는지를 판단하여 최적의 가압 방향을 추정할 수 있다. 이때 수렴 조건문은 다음 과 같다. Err
α는 T축 방향으로의 가압 방향 오차 허용 범위를 나타내고, Err
β는 L축 방향으로의 가압 방향 오차 허용 범위를 나타낸다.
If | α + −α
−|<Err
α& | β + −β - |<Err
β, Go to ‘Step 8’, Else Go to ‘Step 6’
Step 6 ( 제어입력 계산 단계) : Steady state error가 0이 되도 Fig. 4. Control flow for finding optimal direction of pressurizing the
radial artery
록 하기 위해서 Step 4,5에서 계산한 기울기 변화량에 직접 비 례이득을 곱하여 제어입력을 산출한다. 각 제어 입력은 즉, 아 래 식처럼 4,5번 좌표축의 회전각인 q 4 , q 5 에 즉각 대응한다.
Δθ 4 =K a *(α + −α - ) Δθ 5 =K b *(β + −β - )
Step 7 (역기구학 계산 단계) : Dq 4 , Dq 5 회전이 맥센서 중심 인 e 축의 원점 이동 없이 이뤄질 수 있도록 d 1 ,d 2 ,a 2 의 이송량 을 계산하여 이동한다. 이후 Step 3으로 이동해 Step 5의 수렴 조건이 만족할 때까지 Iteration을 수행한다.
Step 8 ( 맥 가압 시작위치 이송 단계) : 수렴 조건을 만족하 면, 6번 축에 장착된 선형 이송 액추에이터를 이용하여z e 축방 향으로 미세 이송을 시작한다. 이때, 맥센서 표면이 피부층에 접 촉하는 시점(Fz 6 >10gf) 에 이송을 정지한다.
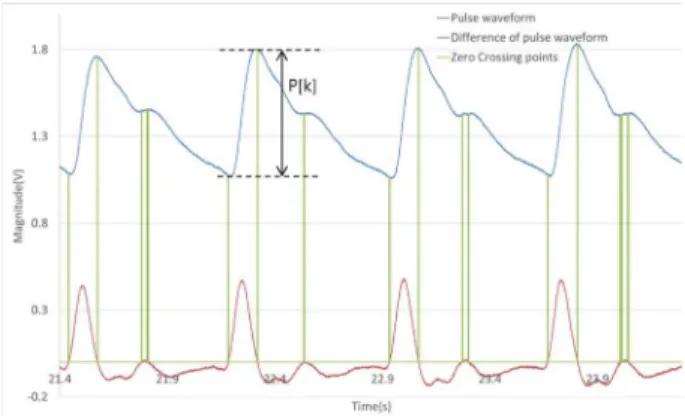
Step 9 ( 최대 압맥파 검출 단계) : 혈관을 서서히 가압해가면 서 맥파 미분파의 zero crossing points(ZCPs)지점에서의 맥파 값(p[k])을 실시간으로 계산한다. 이때 K max = argmax k (p[k]-p[k- 1]) 인 시점 K max 를 찾아 최대 맥파 p max = p[K max ]-p[K max -1] 를 획
득한다. Fig. 7은 맥파(푸른색)와 미분파(붉은색) 및 탐색한 ZCPs ( 녹색) 결과를 보여준다.
Step 10 ( 종료) 최대맥파를 검출하면 맥측정을 종료한다.
Fig. 6은 제안한 측정 및 제어 방법에 따른 로보틱 토노메트 리 메커니즘의 구동 예시를 보여준다. 즉, 로봇 끝단이 동일한 변량(|D + |=|D - |)으로 좌우로 움직일 때, 맥센서면이 피부와 접촉 하면서 기울어지는 각도의 차이(α + -α - ) 가 제어입력으로 되먹임 되는 과정이 보여진다.
3. 실험 결과 및 고찰
3.1 실험 절차 및 분석 방법
본 시스템의 정밀 측정 성능을 평가하기 위해 인체를 대상으 로 한 파일럿 실험을 수행하였다. 본 실험은 피험자 1인(30대, 남성, 정상인)을 대상으로 왼팔 손목 ‘관’ 부위(맥진에서 요골이 가장 두드러지게 드러난 부분에서의 맥동이 느껴지는 위치[8,9]) Fig. 5. Coordinates definition for ideal pressurization posture of the
pulse sensor.
Fig. 6. Example of working mechanism of the tonometry sensor to find the proper pressurization angles (q 4 ) rotated along the axis T.
Fig. 7. Example of pulse waveform signals measured from the sub- ject, and the definition of the p[k]
Fig. 8. Experimental setup for a pilot study
맥파 중 최고값 순으로 3개의 채널에 대해 CV를 계산하여 비 교 분석하였다.
3.2 실험 결과 및 분석
파일럿 실험을 통해 획득한 맥파의 시계열 원데이터 신호는 Fig 9 와 같다. 6개의 채널 중에서 상위 3개의 최대 p[k]를 갖는
3,4,5 번 채널에 대해 p[k]의 변화를 보여준다. 그림에서 보듯이 혈관이 완전히 닫히는 시점 이전에 최대 p[k]를 탐색한 후 최적 의 가압값으로 가압력을 복귀시켜 최대 맥파를 일정 가압으로 측정 저장하는 것을 확인할 수 있다.
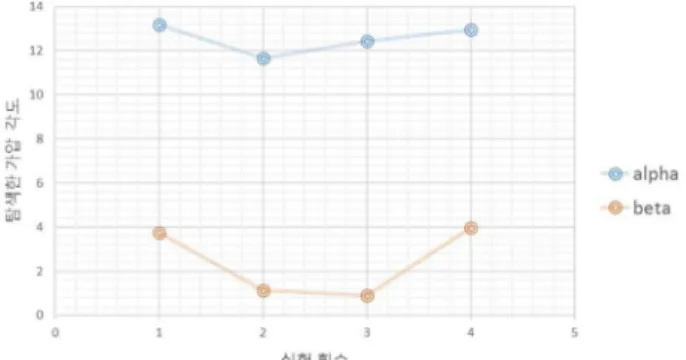
매니퓰레이터가 최적의 가압 방향을 찾기 위해서 평균 5~6회 의 Iteration을 수행하였고, Fig 10과 Table 1에서 보는 것처럼 a=±0.58°, b=±1.42° 의 오차 범위(STD) 안에서 안정적으로 최적 의 가압 각도를 찾았다. 본 연구결과는 정창진 연구진[4]이 제 안한 바와 같이, 맥파의 측정 변동성을 최소화시키기 위해 필요 한 가압 각도 오차 허용 범위(±3°)이내에 든다. 즉, 파일럿 스터 디를 통해 본 메커니즘이 정밀 맥파 획득을 위한 정교한 혈관 가압 성능을 만족함을 확인하였다.
Table 2에서 보듯이 상위 3개의 최대 맥파(P k max , k=1,2,3)는 3,4,5번 채널, 즉, 중심 채널 주변에서 획득되었고, 이는 본 시스 템의 맥 센서 중심이 혈관의 중심을 정확하게 가압하고 있다고 판단할 수 있다. 최고 P 1 max 의 CV값은 4.692 %로 가장 높은 정 밀도를 나타냈다. 이 값은 일반적인 의료기의 측정 변동성 기준 인 CV(=5%) 성능을 만족하는 수치이다. 두번째, 세번째로 높은 P 2 max , P 3 max 의 경우 각각 6.994, 11.039 %의 CV 성능을 보였 다. 혈관 중심에서 맥파가 벗어날수록 측정 정밀도가 낮아진 가 장 큰 요인으로 x e 축방향 회전각이 제어되지 않은 것을 들 수 있다. 즉, 혈관이 L축 방향으로 평행하게 놓여있는 것을 가정하 였으나, 실제 임상에서는 혈관 방향이 일치하지 않을 가능성이 Fig. 9. Examples of raw sensor signals acquired from multi array
pulse sensor and the p[k]s extracted from the three channels with the highest peak values.
Fig. 10. Control results of pressurization direction of radial artery obtained for four trials
Table 1. Results of pressurizing direction control of the robotic mechanism obtained for four trials
Alpha Beta
Trial 1 13.164 3.749
Trial 2 11.646 1.137
Trial 3 12.443 0.913
Trial 4 12.937 3.966
MEAN 12.5475 2.44125
STD 0.582109 1.420536
MEAN : mean, SD : standard deviation
높고, 현재 개발한 시스템의 경우 x e 축방향 제어를 위한 엑추에 이터가 장착돼있지 않다. 이러한 구조적 불확실성과 가압 축 방 향 회전 제어를 하지 않아 발생하는 각도 오차는 최대 맥파의 오차를 유발하게 된다. 전민호 연구팀[5]에 의하면 이 각도 오 차에 따라 P max 가 10 ± 0.45 %까지 변화될 수 있다고 보고하고 있다. 이 같은 오차를 줄이기 위해서 x e 축 방향 회전 액츄에이 터를 추가 장착하거나, 다채널 맥센서를 이용해 회전 각도를 추 정하여 해소하는 방법을 이용할 수 있다. 이 같은 방법을 통해 본 시스템을 보완하면 보다 정확한 맥파를 획득할 수 있을 것 으로 기대한다.
4. 결 론
본 논문에서는 로보틱 토노메트리 센서의 가압 방향 제어를 위한 새로운 방법을 제안하고, 파일럿 실험을 통해 그 가능성을 확인하였다. 실험 결과 두 가압 방향에 대해 ±3°이내 범위에서 최적의 가압 방향을 획득할 수 있었고, 최대 맥파를 추출하여 변동성을 평가한 결과 최대 피크에 대해서는 5%이내의 변동 성 능을 확보하였다.
좀 더 정밀한 맥파 획득을 위해서는 아래와 같은 추후 연구 가 필요하다.
- 최적의 가압 방향을 찾기 위한 Iteration 횟수를 최소화하여 측정 시간을 줄이는 제어 알고리즘 개발이 필요. 이때, 의료 기의 특성상 외란(특이적인 손목 형상 구조, 측정시 사용자 의 움직임 등)에 강인한 성능 확보.
- 참조 혹은 표준 맥파 재현 장치 등을 활용한 정확도 성능 평 가. 표준 혈압계와 같이 맥파의 기준값을 제공할 수 있는 장 치를 활용해 정확도와 정밀도를 동시에 평가할 수 있어야 하고, 의료기 조작자에 대한 의존성도 함께 고려되어야 함.
- 인체 대상 임상시험을 통해 심혈관계 질환 및 한의학적 변
증과의 상관성 평가 필요. 임상 대상(성별, 나이, BMI 등)의 확대 및 심혈관계 질환과 관련된 주요 지표(AIx, 혈압, PWV 등)의 측정 정확도 분석 필요
본 연구에서 제안한 정밀 맥파 측정 방법을 통해 향후 토노 메트리 맥 측정 기기의 완성도를 높이고, 요골 동맥파의 한양방 적 임상 유용성을 확보할 수 있기를 기대한다.
감사의 글
This work was supported by a grant (K17022) from the Korea Institute of Oriental Medicine (KIOM), funded by the Korean government.
REFERENCES