논문 2016-53-10-15
영상 소나를 이용한 수중 물체 외형 복원에 관한 기초 실험
( Experimental results on Shape Reconstruction of Underwater Object Using Imaging Sonar )
이 영 준
*
, 김 태 진*
, 최 진 우*
, 최 현 택*
( Yeongjun Lee, Taejin Kim, Jinwoo Choi, and Hyun-Taek Choi
ⓒ)
요 약
본 논문은 수중에서 사용되는 영상 소나를 이용하여 수중 물체의 외형 복원을 수행하여 보고 그 결과를 분석한다. 일반적으 로 해양 측량에 많이 사용되는 다중빔 해양 측심기(Multi-beam echo sounder, MES)보다 더 자세한 수중 환경 관찰이 가능한 영상 소나는 상하 방사영역 정보의 불확실성으로 인해 3차원 복원 연구로 활용되기에 어려움이 있다. 이에 본 논문에서는 소 나 영상에서 얻는 물체에 대한 3차원 높이 정보의 불확실성을 줄이기 위해 영상 소나의 상하 방사영역을 좁게 조정하여 영상 소나의 3차원 물체 외형 복원의 어려움을 극복하고자 한다. 또한, 음향 채널별 잡음 제거 필터를 적용하고, 음향 채널별 상호 보완 거리값 검출 방법의 적용을 통해 3차원 위치 정보의 정확도를 높이고자 한다. 제안한 수중 물체 외형 복원 방법은 3가지 물체(원뿔, 구, 기둥)에 대해 3차원 복원 실험을 수행하여 보고 그 결과를 분석하였다.
Abstract
This paper proposes a practical object shape reconstruction method using an underwater imaging sonar. In order to reconstruct the object shape, three methods are utilized. Firstly, the vertical field of view of imaging sonar is modified to narrow angle to reduce an uncertainty of estimated 3D position. The wide vertical field of view makes the incorrect estimation result about the 3D position of the underwater object. Secondly, simple noise filtering and range detection methods are designed to extract a distance from the sonar image. Lastly, a low pass filter is adopted to estimate a probability of voxel occupancy. To demonstrate the proposed methods, object shape reconstruction for three sample objects was performed in a basin and results are explained.
Keywords : 3D Reconstruction, Acoustic, Imaging Sonar, Underwater, AUV
*
정회원, 한국해양과학기술원 부설 선박해양플랜트연구 소 수중로봇연구실(Marine Robotics Lab, Korea Research Institute Of Ships & Ocean Engineering)
ⓒ
Corresponding Author (E-mail : [email protected])
※ 본 연구는 한국해양과학기술원 부설 선박해양플랜 트연구소의 “자율 수중 로봇을 위한 SLAM 기초 기술과 MOOS-IvP 환경 구축” 과제 및 산업통상자 원부의 “수중 인공 구조물의 국소지역 정밀탐사가 가능한 1.0m 위치 오차를 갖는 수중로봇 자율유영 기술개발” 과제 지원을 받아 연구 되었습니다.
Received ;
June 20, 2016Revised ;
August 22, 2016Accepted ;
August 26, 2016Ⅰ. 서 론
수중 로봇 연구 분야에서 수중 환경에 대한 3차원 정 보는 수중 탐사, 인식, 항법 등에 넓게 활용되고 있다[1~7].
수중에서 3차원 정보를 얻을 수 있는 장비로는 측면 주 사 소나(Side Scan Sonar), 다중빔 음향 측심기(Multi- beam Echo Sounder), 그리고 영상 소나(Imaging Sonar) 등이 있다. 이 가운데 영상 소나는 다른 장비에 비해 자 세한 수중 환경 검출이 가능하여 3차원 복원 연구로 활 용하기에 효과적이다.
영상 소나는 음향을 사용하여 수중 환경을 인지하고 광학 영상과 유사한 소나 영상을 출력한다. 하지만 소 나 영상은 광학 영상과 달리 가로축(row)은 소나로부터 상대적인 방향각, 세로축(column)은 소나로부터 상대적 인 거리를 의미한다. 이를 통해 어떠한 물체가 소나 영 상에 존재할 경우 소나로부터 물체까지의 거리와 방향 을 알 수 있다. 하지만 물체의 3차원 위치를 알기 위해 추가로 필요한 높이 정보는 알기가 어렵다. 이러한 이
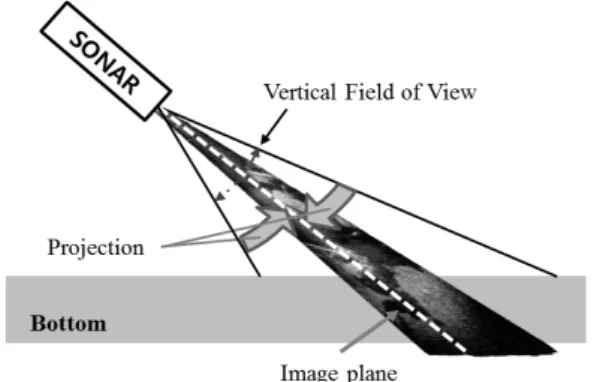
유는 그림 1에서 보는 것과 같이, 소나에서 음향이 송 출되는 상하/좌우 방사영역 중 상하 방사영역(Vertical field of view) 내 물체에서의 음향 반사가 모두 한 곳 의 영상 평면(image plane)으로 투영되어 영상에 표현 되기 때문이다. 이에 따라 소나 영상에 나타나는 각 화 소는 거리와 방향은 알 수 있으나 3차원 높이는 영상 소나의 상하 방사영역 내에 위치한다고 추정만 할 수 있을 뿐이다.
그림 1. 3차원 정보의 소나 영상 좌표계 변환 (세로방향) Fig. 1. Coordinate transformation from 3D information to
sonar image. (vertical view)
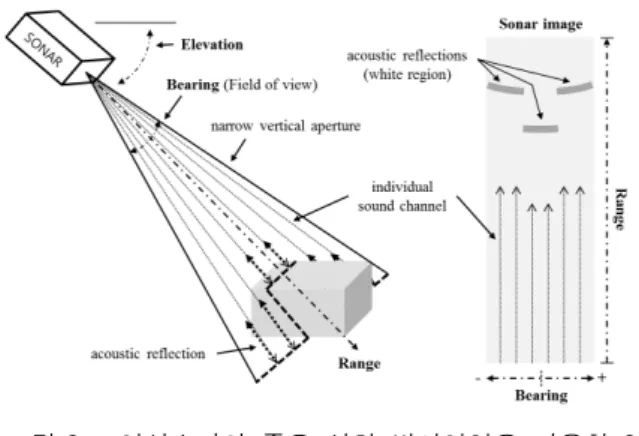
그림 2. 소나 잡음 및 거짓 정보의 발생 Fig. 2. Acoustic noise and false information.
소나는 피사체로부터 반사되어오는 음향을 검출하기 때문에 음향의 특징이 소나 영상에도 나타난다. 대표적 으로 나타나는 특징은 영상 잡음과 거짓 정보의 발생
현상이다[8~9]. 첫 번째, 영상 잡음은 수중 상태에 따라
음향의 전달 손실, 온도, 주변 소음, 흡수, 미세 먼지 (floater) 등으로 인해 음향이 왜곡되어 영상에 나타는 것으로 화소 값의 편차가 심하거나 영상에서 흰색 반점
(speckle)과 같은 잡음으로 나타나게 된다. 두 번째, 거 짓 정보의 발생은 수중에서 음향의 다중 반사 또는 다 중 경로에 의해 잘못된 정보가 소나에 탐지되게 되고 영상에서 일정한 형상이 반복적으로 나타나거나 이로 인해 잘못된 거리 정보를 얻는 원인이 되는 현상이다.
그림 2는 이러한 현상이 발견되는 소나 영상의 예이다.
이에 본 논문에서는 소나 영상을 이용한 수중 3차원 물체 의 외형 복원을 위하여 보다 실질적인 방법을 적용하여 복원을 수행하고자 한다. 소나 영상을 통해 얻는 물체의 3차원 높이 불확실성을 줄이기 위해 영상 소나의 상하 방 사영역을 줄여 음향이 반사되는 위치를 정확히 추정 가 능하도록 하고, 잡음 및 거짓 정보 문제를 해결하기 위해 음향 채널별 필터링 기법의 적용 방법을 제안하고자 한 다. 제안한 방법을 토대로 다양한 외형을 갖는 수중 물체 의 3차원 복원 실험을 수행하여 보고 이를 통해 외형 복 원 성능을 검증하고자 한다.
Ⅱ. 본 론
1. 소나 영상 정보의 3차원 위치 변환
소나 영상은 2차원 위치 정보를 포함하고 있다. 영상 의 개별 화소()가 갖는 정보는 식(1)에서 보는 것과 같이 화소의 가로(), 세로 위치()와 화소값(), 그리 고 영상 소나와의 상대적인 방향각()과 거리()를 갖 는다. 그리고 이러한 화소는 3차원 공간에서 영상 소나 의 상하 방사영역() 내에 존재한다.
(1) 영상 소나는 구면 좌표계를 기준으로 방향과 거리가 같고 소나의 상하 방사영역(± )내 모든 3차원 영역에 서 반사되는 음향의 크기를 하나의 화소에 나타낸다.
이는 반대로 영상에서 각 화소의 3차원 높이( ) 정보는 소나의 상하 방사영역 내 임의의 위치가 될 수 있음을 의미하며 이러한 불확실성은 3차원 위치 변환을 어렵게 하는 요인이 된다. 하지만 이것은 영상 소나의 상하 방 사영역()를 하드웨어적으로 매우 좁게 수정하여 해결 할 수 있다. 이러한 하드웨어 수정 방법은 영상 소나에 따라 방법의 차이가 있을 수 있다. 본 논문에서 사용된 영상 소나(Soundmetrics, DIDSON)의 경우 소나 전방 에 음향 렌즈를 장착하여 상하 방사영역의 수정이 가능 하다.
상하 방사영역을 좁게 조정하게 되면 음향 반사는 3 차원공간상의 매우 좁은 영역 또는 하나의 위치에서만
그림 3. 영상소나의 좁은 상하 방사영역을 이용한 3차원 위치 검출 방법
Fig. 3. 3D location extractor using narrow vertical aperture of imaging sonar.
나타나게 될 것이라 가정할 수 있고, 결과적으로 개별 화소의 높이는 소나의 지향각과 동일하다고 추정할 수 있다. 그림 3의 왼쪽은 좁은 상하 방사영역을 갖는 영 상 소나를 통해 수중 물체에서 소나 영상을 획득하는 개념도이다. 개별 음향 채널은 소나에서 하나의 음향 트랜스듀서에서 방사되는 음향을 의미하며 이는 영상에 서 각 세로줄(column)에 정보가 나타나게 된다.
그림 3의 오른쪽과 같이 얻어진 소나 영상은 영상 전 처리를 통해 각 음향 채널별로 거리 값을 검출할 수 있다.
결과적으로 개별 음향 채널의 방향과 소나의 지향각, 물체까지의 거리값을 알게 되면 식(2)와 같은 간단한 3 차원 위치 변환을 통해 직관적으로 위치 추정이 가능한 직교 좌표계로 변환할 수 있다. 여기서 , , 는 영 상 소나의 3차원 전역 위치이고, , , 는 각 화소 의 추정된 3차원 전역 위치이다.
cos
sin
(2)
2. 잡음 제거 방법
그림 3의 오른쪽과 같은 소나 영상을 얻은 후에 ‘띠 (white region)’의 정확한 위치를 검출해야만 물체의 정 확한 3차원 위치를 얻을 수 있다. 하지만 그림 2에서 보 는 것과 같이 소나 영상은 주변 환경 및 음향 신호의 간섭 등으로 인한 많은 잡음과 거짓 정보의 발생이 나 타난다. 이러한 현상들은 3차원 위치 계산 정확도에 영 향을 미치므로 사전 전처리 과정이 필요하다. 이를 위 해 본 논문에서는 두 가지 전처리 기법을 적용하였다.
첫 번째, 소나 영상에서 거리 정보는 각 세로줄마다 얻
을 수 있으며 이는 영상 소나에서 개별 음향 채널을 의 미한다. 그러므로 효과적인 잡음 제거를 위해서는 소나 영상의 세로줄마다 개별적인 전처리 기법의 적용이 필 요하다. 이를 위해 잡음 제거로 많이 사용되는 평활화 필터인 가우시안 필터를 각 영상의 세로줄에 적용하였다. 두 번째, 개별 음향 채널은 주변 음향 채널과 비교하여 유 사한 거리를 갖는 물체 또는 지역에 반사 될 것으로 가 정할 수 있다. 이는 주변 채널과 유사한 거리 값이 측정 되어야 함을 의미하며 이러한 가정을 토대로 주변 거리 값과 비교하여 유사하도록 보정하는 필터링을 적용할 수 있다. 이를 위해 본 논문에서는 중앙값 필터(median filter)를 적용하여 모든 거리 측정값을 보정하였다.
3. 거리값()의 검출
좁은 상하 방사영역을 갖는 영상 소나를 통해 물체를 관측하면 그림 3의 오른쪽과 같이 소나 영상에는 실제 거리 값이 나타나는 것이 아닌 음향이 반사되어 온 곳 의 위치가 ‘흰 띠’처럼 나타난다. 이러한 ‘띠’를 영상에서 검출하여 거리 값을 알 수 있다.
‘흰 띠’는 주변 영역에 비해 화소 값이 큰 영역이다.
이를 통해 개별 음향 채널별로 최대값 검출 방법을 사 용하면 쉽게 하얀 띠 부분을 검출할 수 있다. 하지만 그 림 2의 오른쪽과 같이 거짓 정보의 문제가 발생한다면 같은 음향 채널에서도 흰 부분이 2개 이상 검출 될 수 있다. 예를 들어 그림 2의 오른쪽은 2개의 흰 부분 중 실제 거리로 측정되어야 할 곳은 아래쪽에 있는 첫 번 째 음향 반사이다. 이러한 두 가지 문제를 상호 보완하 기 위해 최대값 검출기와 first return 검출기가 조합된 거리 검출기를 설계하였다. 표 1은 이러한 검출기의 알 고리즘을 보여준다.
T
Functions
1
find 1
stmaximum value
, (0< <max row)
(
is -th channel data array)
2Set zero the intensity in
between to ,
( is range, user parameter)
3find 2
ndmaximum value
4
if ×
>
, ( is weight, user parameter)
is real range value.
else
is real range value.
표 1. 거리검출을 위한 상호보완 알고리즘
Table1. Pseudo code about distance calculator.
4. 3차원 공간의 추정
수중 물체의 3차원 가상공간 외형 복원을 위해 3차원 격자 지도를 활용한다. 영상 소나로부터 물체의 외형에 대한 3차원 위치 정보를 검출 한 후 해당 공간의 점유 유무를 판별해야 한다. 격자 지도의 개별 단위 공간은 점유 확률의 추정을 통해 점유 유무를 판단한다. 점유 확률()은 단위 공간과 연결된 소나 영상의 화소값 ()에 의해 추정된다. 식(3)은 점유 확률의 추정을 위 해 사용되는 저주파 통과 필터 형식의 계산식이다. 기 존의 공간 점유 확률( )과 현재 입력된 화소값() 를 가중치 파라미터(
)와의 연산을 통해 현재의 공간 점유 확률()을 추정한다. 본 논문에서 사용된 는 0.6이다.
× × (3) 식(3)을 통해 얻은 점유 확률은 일정한 임계값 이상 이면 해당 단위 공간은 물체가 존재하는 것으로 판단할 수 있는데 본 논문에서 사용된 임계값은 0.7이다. 이러 한 공간 추정 결과에 따라 얻어진 수중 물체의 외형은 단위 정육각형 공간의 집합으로 복원됨을 알 수 있다.
Ⅲ. 검증 실험
1. 실험 환경
제안하는 수중 물체 외형 복원 방법의 성능 검증을 위해 선박해양플랜트의 소형 수조에서 실험을 수행하였다.
실험에 사용된 영상 소나는 Soundmetrics의 DIDSON (Dual-frequency Identification Sonar)이다. 본 영상 소 나의 좌우 음향 방사영역은 28.8°, 상하 음향 방사영역 은 14.0°다. 앞서 언급하였듯이, 3차원 위치 정보 추정의 불확실성을 감소하기 위한 영상 소나의 상하 방사영역 을 줄이기 위해 소나 전면에 음향 렌즈를 장착하여 약 1°의 좁은 상하 방사영역이 될 수 있도록 조정 하였다.
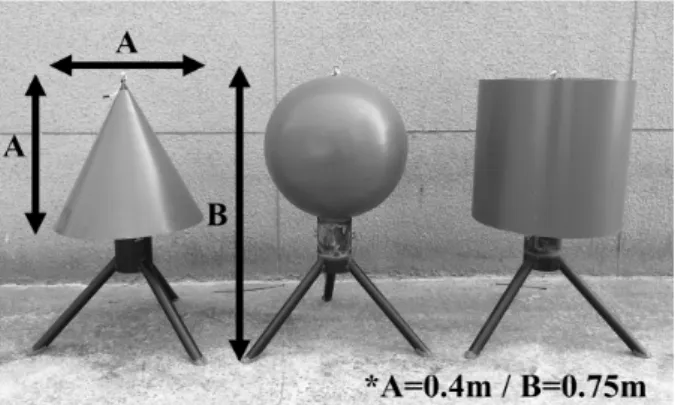
3차원 수중 물체의 스캐닝을 위해 영상 소나를 팬틸트 (Pan-tilt) 장비에 장착하여 실험을 수행하였다. 팬틸트 장비에서 출력되는 틸트(tilt) 정보를 통해 영상 소나의 지향각을 얻을 수 있다. 실험에 사용된 수중 물체는 그 림 4에서 보듯이 원뿔, 구, 원기둥의 다양한 외형을 갖 는 철제 구조물이다.
검증 실험은 그림 5에서 보듯이 실험 대상 물체를 수 조의 중앙에 설치하고 영상 소나가 총 6곳의 위치에서 –40.0°에서 10.0°까지 상하 동작을 반복하며 소나 영상
그림 4. 실험에 사용된 물체 (원뿔, 구, 원기둥) Fig. 4. Experimental object. (Cone, sphere, cylinder)
그림 5. 실험 환경 및 영상 취득 위치 Fig. 5. Experimental environment.
을 취득한다. 영상 소나가 갖는 6개의 위치는 미리 알 고 있고, 이를 바탕으로 3차원 외형 복원은 실시간으로 수행된다.
2. 실험 결과
가. 외형
모든 실험용 물체에 대한 3차원 외형 복원을 수행한 결과를 보면 전체 외형은 실험 물체와 유사하게 복원되 었음을 볼 수 있다. 외형 복원된 결과를 통해서도 본래 실험에 사용된 물체가 무엇이었는지 추정이 가능하며 각기 다른 모양을 갖는 상부와 받침대로 구성된 하부까 지 안정적으로 복원되었음을 확인할 수 있다.
그림 6은 제안한 방법에 의해 외형 복원된 원뿔이다.
원뿔은 격자 지도의 최소 단위를 0.02m로 설정하여 복 원을 수행하였고 구와 원기둥은 0.01m로 복원을 수행하 였다. 이에 따라 원뿔은 다른 외형 복원된 물체와 비교 하여 전체 형상이 거칠게 복원된 것을 볼 수 있다. 하지 만 물체 상부에서 아래로 내려갈수록 서서히 둘레가 커 지며 외형이 매끄럽게 이어지고 있음을 알 수 있고, 이 는 제안한 방법으로부터 얻는 외형에 대한 정보가 격자
그림 6. 3차원 외형 복원 결과 (원뿔)
Fig. 6. Experimental result of 3D shape reconstruction.
(Cone)
그림 7. 3차원 외형 복원 결과 (구)
Fig. 7. Experimental result of 3D shape reconstruction.
(Sphere)
그림 8. 3차원 외형 복원 결과 (원기둥)
Fig. 8. Experimental result of 3D shape reconstruction.
(Cylinder)
크기에 관계없이 매우 안정적으로 검출, 복원되고 있음 을 확인할 수 있는 결과이다. 이는 구와 원기둥 복원 결 과에서도 동일하게 확인된다.
그림 7에 나타난 구형 물체에 대한 외형 복원 결과를 보면, 구에 대한 전체 외형이 빈틈없이 복원된 것처럼 보이나 오른쪽 하단의 옆모습을 확인하여 보면 중앙 부 분이 복원되지 않았음을 볼 수 있다. 실험 과정에서 영 상 소나는 물체의 전, 후방 6곳에서만 영상을 획득하였 다. 이런 이유로 영상 소나의 좌우 방사영역이 닿지 않 는 범위는 복원이 수행되지 못하였다.
모든 물체의 하단부에는 상부를 지지하는 지지대가 놓여 있다. 실제 지지대는 지름이 약 0.02m인 원기둥 형태이다. 격자 공간 단위가 0.02m인 원뿔 복원 결과에 서는 지지대의 모양이 끊겨 있거나 그 형태를 알아보기 힘들다. 하지만 격자 공간 단위가 0.01m인 구와 원기둥 복원 결과를 보면 지지대가 끊어지지 않으며 상부를 받 치고 있는 것을 명확하게 확인할 수 있다. 이는 격자 공 간 단위가 작을수록 물체를 더욱 자세하게 표현할 수 있음을 보여준다.
나. 잡음 제거
본 실험에서는 소나 영상에 나타나는 다양한 잡음을 제거하기 위해 개별 음향 채널별 가우시안 필터와 주변 채널 간의 측정거리에 따른 중간값 필터를 사용하였고, 다중 경로 현상으로 인한 거짓 정보의 제거를 위한 상 호 보완 거리값 검출기가 사용되었다.
전체적으로 복원된 외형은 매끄럽게 검출되고 있으 나 잡음 제거를 위한 전처리가 수행되었음에도 복원된 물체의 주변에는 많은 잡음을 갖고 있다. 잡음 제거는 매 영상마다 수행되며 잡음이 제거된 2차원 영상을 보 면 몇 개의 화소를 제외하고는 효과적으로 잡음이 제거 된 것을 볼 수 있었다. 하지만 3차원 외형 복원 결과를 확인하여 보면 2차원 영상에서 발견된 작은 잡음 요소 가 3차원 공간에 누적되어 굉장히 많은 잡음으로 나타 나는 것을 볼 수 있다.
모든 복원된 실험 물체의 중간 부분에는 매우 많은 잡음이 나타나는 것을 볼 수 있다. 이것은 주변에 복잡 하게 구성된 물체 형상으로 인해 음향이 서로 반사, 간 섭되어 나타나는 현상이다.
Ⅳ. 결 론
본 논문은 수중 영상 소나를 이용하여 3차원 물체 외
형 복원에 현실적인 방법을 제안하고, 이와 관련된 기 초적인 실험 결과를 논하였다. 수중에서 사용되는 영상 소나는 다른 소나에 비해 정확도와 정밀도가 매우 높으 며 이러한 장점을 이용하여 3차원 복원을 수행하기에 매우 효과적이다. 하지만 소나 영상이 주는 3차원 정보 의 불확실성과 잡음 및 거짓 정보 등은 3차원 외형 복 원을 하는데 어려움을 준다. 이에 본 논문은 영상 소나 의 상하 방사영역을 매우 좁게 조정하고 가우시안 및 중간값 필터, 상호보완 거리값 검출기를 적용하여 영상 소나를 이용한 3차원 외형 복원 방법을 제안하였고, 검 증 실험을 통해 성능을 확인하였다. 검증 실험에서는 3 가지 다른 외형을 갖는 물체에 대해 실시간 외형 복원 을 실시하였다. 그리고 제안한 방법이 실제 물체와 유 사하며 안정적인 외형을 갖는 3차원 복원 물체를 생성 하였음을 확인하였다. 그리고 격자 공간 단위의 크기에 따라 복원된 물체의 세세함이 다름도 알 수 있었다. 잡 음 제거 결과에서는 2차원 영상에서 제거되지 않은 작 은 잡음이 3차원 공간에 복원, 누적되면서 큰 잡음으로 나타났다. 이는 2차원 잡음 제거와 함께 3차원 공간에 서의 잡음 제거가 필요함을 알 수 있었다. 실험 과정에 서 영상 소나가 미치지 못하는 범위는 외형 복원이 수 행되지 못하였다. 이를 위해 수중 항법 정보와의 융합 을 통해 영상 소나의 전역 위치를 추정하면서 이와 동 시에 영상을 취득하며 3차원 외형 복원을 수행할 필요 가 있음을 알 수 있었다.
향후 계획은 본 논문에서 사용된 좁은 상하 방사영역 을 갖는 영상 소나 측정 모델이 아닌 기존의 불확실성 을 갖는 측정 모델을 통해 3차원 공간을 추정해보고자 한다. 그리고 본 논문에서 제안한 방법과 수정된 방법 간의 비교를 수행해보고자 한다. 또한 수중로봇과 결합 하여 보다 넓은 범위에 대한 3차원 공간 복원을 수행할 계획이다.
REFERENCES
[1] SC. Yu, “Development of real-time acoustic image recognition system using by autonomous marine vehicle,” Journal of ocean engineering, vol.25, no. 1, pp. 90-105, 2008.
[2] M. VanMiddlesworth, M. Kaess, F.S. Hover and J.J. Leonard, “Mapping 3D Underwater Environments with Smoothed Submaps,” Conf. on Field and Service Robotics (FSR), pp. 17-30, Brisbane, Australia, 2013.
[3] H. Kawano and T. Ura, “Navigation algorithm for autonomous underwater vehicle considering cruising mission using a side scanning SONAR in disturbance,” Conf. on Oceans, pp. 403-408, 2001.
[4] I. T. Ruiz, S. Raucourt, Y. Petillot, and David M. Lane, “Concurrent mapping and localization using sidescan sonar,” Journal of Oceanic engineering, vol.29, no.2, pp. 442-456, 2004.
[5] B. Zerr, G. Mailfert, A. Bertholom, and H.
Ayreault, “Sidescan sonar image processing for AUV navigation,” Conf. on Oceans, vol.1, pp.
124-130, 2005.
[6] H. Kang, “Identification of Underwater Object using Sonar image,” Journal of the Institute of Electronics and Information Engineers, vol. 53, no. 3, pp. 91-98, 2016.
[7] B. On, S. Kim, W. Moon, S. Im, and I. Seo,
“Detection of an Object Bottoming at Seabed by the Reflected Signal Modeling,” Journal of the Institute of Electronics, vol. 53, no. 5, pp. 55-65, 2016.
[8] F. Chaillan, C. Fraschini, P. Courmontagne, “Speckle noise reduction in SAS imagery”, Signal process, vol.87, pp. 762-781, 2007.
[9] John PF and H Arnold Carr, “Sound underwater images : A guide to the generation and interpretation of side scan sonar data,” Lower cape Pub Co, 1990.
저 자 소 개 이 영 준(정회원)
2009년 충남대학교 메카트로닉스 공학과 학사 졸업.
2014년 충남대학교 메카트로닉스 공학과 석사 졸업.
2011년∼현재 한국해양과학기술원 부설 선박해양 플랜트연구소 기술원.
<주관심분야 : 소나 영상처리, 영상소나, 수중로봇>
김 태 진(정회원)
2011년 KAIST 전기 및 전자공학 과 학사 졸업.
2014년 KAIST 로봇공학학제전공 석사 졸업.
2014년∼현재 한국해양과학기술원 부설 선박해양 플랜트연구소 연구원.
<주관심분야 : 무인수상선, 자율항법>
최 진 우(정회원)
2003년 포항공과대학교 기계공학과 학사 졸업.
2005년 포항공과대학교 기계공학과 석사 졸업.
2011년 포항공과대학교 기계공학과 (로보틱스) 공학박사.
2013년∼현재 한국해양과학기술원 부설 선박해양 플랜트연구소 선임연구원.
<주관심분야 : 수중로봇, 위치인식, SLAM>
최 현 택(정회원) - 교신저자 1991년 한양대학교 전자공학과 학
사 졸업.
1993년 한양대학교 전자공학과 석 사 졸업.
2000년 한양대학교 전자공학과(제 어 및 로보틱스)공학박사.
1993년∼1995년 KT 연구개발원 S/W 연구소 전 임연구원.
2000년∼2003년 하와이 주립대학교 기계공학과 Post-Doc.
2003년∼현재 한국해양과학기술원 책임연구원.
<주관심분야 : 수중로봇, 해양시스템, 강인제어>