자동차 동력원별(ICEV, PHEV) 연비산출 모델개발 및 이의 검증
김주환
*
ㆍ박정민*
ㆍ김탁규*
ㆍ이진욱*,†
Verification and Development of Simulation Model for Fuel Consumption Calculation between ICEV and PHEV
J. W. Kim, J. M. Park, T. K. Kim and J. W. Lee
Key Words: Fuel consumption rate(연비), Chassis dynamometer(차대동력계), Real driving condition(실주행 조건), Driving cycle(주행 사이클), Vehicle power(차량출력)
Abstract
CO2 emission regulation will be prescribed and main issue in automotive industry. Mostly, vehicle’s fuel efficiency deeply related to CO2 emission is regulated by qualified driving test cycle by using chassis dynamometer and exhaust gas analyser.
But, real driving fuel consumption rate depends so much on the individual usage profile and where it is being driven: city traffic, road conditions. In this study, vehicle model of fuel consumption rate for ICEV and PHEV was developed through co-simulation with CRUISE model and Simulink based on driving control model. The simulation results of fuel consumption rate were analysed with on-road vehicle data and compared with its official level.
약어설명
ICEV : Internal Conbustion Engine Vehicle PHEV : Plug-in Hybrid Electric Vehicle
1. 서 론
1.1 연구 배경
자동차의 성능을 판단할 때 중요한 기준의 하나가 바 로 연비(자동차 단위 연료당 주행 거리의 비율)이다(1). 국내에서는 1988년부터 승용자동차 연비표시제도 수립
및 시행을 시작으로 매년 실정에 맞도록 수정 및 보안 이 진행되고 있으나, 표시연비에 있어 주행여건, 주행거 리, 교통여건, 외기온도, 기상여건 및 운전자 주행습관 등에 따라 실주행 연비와의 차이가 발생하는 부분에 대 해서는 마땅한 해결방안이 제시되지 못하고 있는 실정 이다(2-4).
따라서 2012년 승용차에 대한 ‘신연비 제도’의 도입 을 통해 기존의 도심연비(FTP-75모드) 외에 고속도로연 비(HWFET모드)가 추가로 반영된 복합연비가 도입되었 다. 따라서 현재 국내 연비제도는 자동차 도심연비, 고 속도로 연비 및 복합연비와 이 연비에 따라 부여되는 등급정보, 대표적 온실가스인 이산화탄소의 배출량을 표시토록 하여, 소비자에게 보다 연비가 우수하고 친환 경적인 자동차를 구매하고, 제작사에게는 고효율 자동 차를 제작 및 판매토록 하고 있다. 또한 다양한 조건의 운전 환경이 연비에 미치는 영향을 고려하기 위한 5- Cycle 보정식도 함께 적용중이다.
이러한 제도하에 자동차의 공인 연비는 ‘카본밸런스
(Recieved: 18 Jan 2017, Recieved in revised form: 7 Mar
2017, Accepted: 8 Mar 2017)
*
숭실대학교 대학원 기계공학과
†
교신저자, 숭실대학교 기계공학과
E-mail : [email protected]
TEL : 02-820-0929
법(Carbon-Balance)'을 적용하여 측정하고 있다. 쉽게 말 해, 자동차 사용자가 연비를 측정할때처럼 연료를 채워 가면서 측정하는 것이 아니라, 차량실험실에서 자동차 를 차대동력계에 올려놓고 모의 주행(특정시험모드 적 용)을 하며, 이 때 배출되는 탄소성분을 수집해 연료 소 비를 측정하는 방식이다. 즉, 실제로 도로를 달리는 것 은 아니고 실험실에서 일정한 환경을 구성해서 소비된 연료량을 측정하는 것이다. 하지만 이러한 공인 연비의 수치는 자동차 사용자가 실제 주행을 통해 느끼는 체감 연비와 다소 격차가 있다.
1.2 연구 목적 및 내용
자동차 공인 연비와 체감 연비간의 격차를 해소하고 소비자와 자동차 제작사간의 연비 공감대가 마련될 수 있도록 체계적인 연구가 필요한 실정이며, 본 연구는 이 의 일환으로 수행되었다.
따라서 자동차 공인 연비에 미치는 비동력계 요소의 영향을 종합적으로 분석하기 위한 연구프로젝트의 사전 연구단계(feasibility study step)로서, 본 논문에서는 실도 로 주행데이터를 활용한 자동차 2개 동력원별(내연기관 차량, PHEV) 연비 산출 모델 개발을 통한 시뮬레이션 및 이를 공인 연비와 비교한 결과를 먼저 보고하고자 한다. 참고로 이를 통해 향후 다양한 비동력계 요소들에 대한 시뮬레이션 및 실제 차량시험 데이터와 상호 상관 성 분석을 체계적으로 수행할 예정이다.
2. 연비산출 해석모델 개발
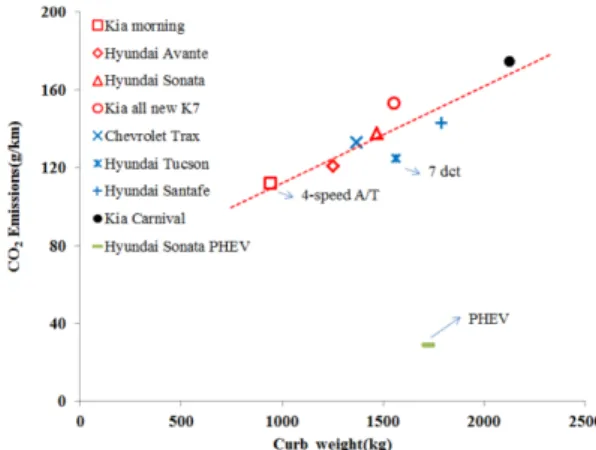
본 연구에서 차량용 연비산출은 내연기관차량과 플러 그인 하이브리드차량을 대상으로 수행하였는데, 먼저 내연기관차량으로는 S사의 2.2L급 싱글터보형 과급방 식 SUV경유차량을 선정하였다. 이는 향후 차량내 PEMS 탑재와 실도로 주행조건 등을 감안하였다(5). 그 리고 공인 연비제도에 영향을 미치는 신기술 적용차량 으로는 하이드리드자동차와 순수전기자동차의 특성을 모두 가지고 있는 플러그인 하이브리드차량(PHEV)을 선정하였으며, H사 PHEV가 현재 국내에서 생산 및 시
Fig. 1 Correlation between CO2 emissions and vehicle curb weight of ICEV and PHEV on sale in Korea
Fig. 2 Vehicle co-simulation circuit under AVL CRUISE
판(2016년)되는 유일한 차량이기에 이를 적용하였다.
차량의 연비특성을 포함한 차량 주행모델 기반의 상 용 소프트웨어인 AVL사 CRUISE프로그램을 사용하여 Fig. 2와 같은 차량 모델(변속기, 토크 컨버터, 4기통 디 젤엔진, 전륜구동시스템)을 개발하였다(6). AVL CRUISE 프로그램은 차량연비/배기 및 동력 성능 시뮬레이션 도 구로써, 차량의 제어모델에는 다소 취약하다. 따라서 본 연구에서는 Matlab Simulink를 제어기 모델(Fig. 2내 controller)로 활용함으로써 실제 차량에 가까운 주행제 어를 할 수 있었다(7). 즉, CRUISE프로그램과 연동되는 차량주행 제어모델의 Co-simulation 해석기반을 구축한 특징이 있다.
그리고 차량 시뮬레이션에 필용한 주행정보를 얻기 위해 OBD-II 규정에서 제공하는 차량의 정보만으로는 실제 차량에 가까운 모델을 개발하기에는 어려움이 있 다. 하지만 OBD-II 이외의 차량 CAN 정보는 제작사에 서 제공하고 있지 않아 CAN 데이터 분석을 통해 별도 로 취득해야 한다(8). Table 1은 본 연구 대상 차량에서 취득할 수 있는 OBD-II 이외의 V-CAN 데이터 목록을 나타낸 것이다. 본 연구에서는 필요한 정보에 따라 각각 의 개별 시스템 혹은 동시에 여러 시스템에서 데이터를 받아 해석시뮬레이션에 적용하였다.
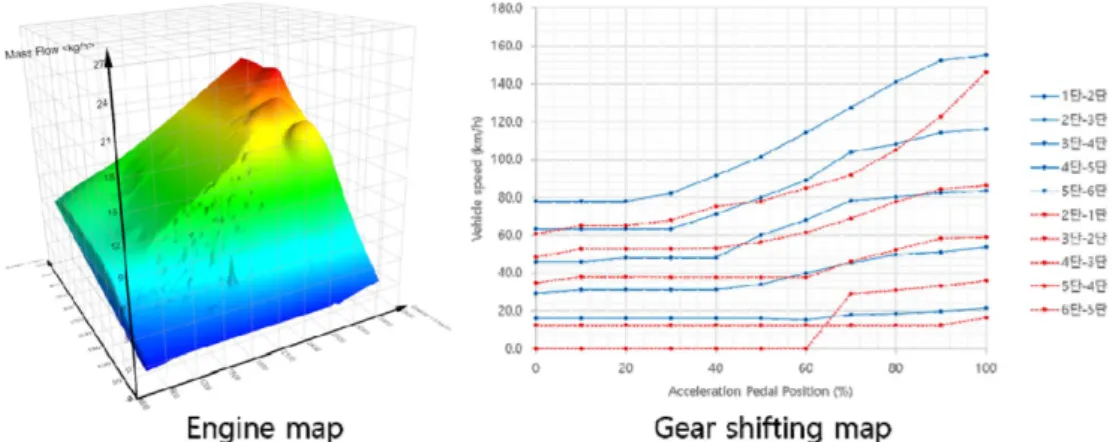
그리고 Fig. 3은 효율적인 실제 도로 주행 연비 특성 분석을 위한 차량 시뮬레이션 모델 개발을 위한 차량의 주행 중 V-CAN에서 취득한 정보를 사용하여 계산한 엔 진맵과 변속포인트맵을 나타낸 것이다.
2.1 ICEV 차량 모델(9,10)
본 연구에서는 ICEV차량의 CRUISE 모델을 Simulink 변속모델과 함께 구성하여 개발하였다.
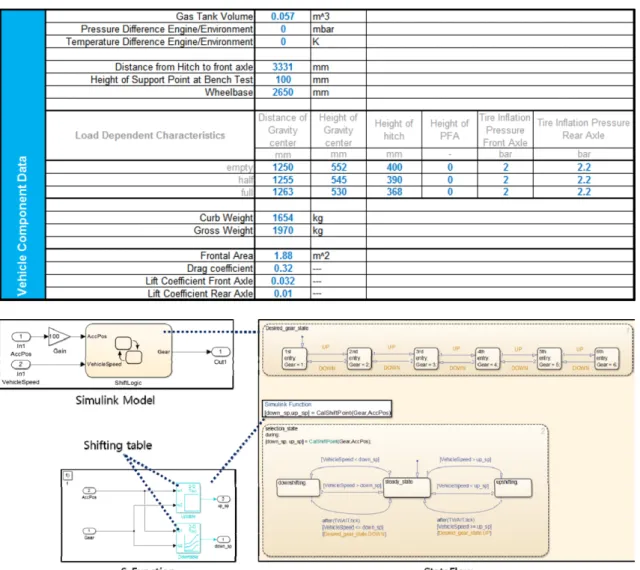
차량 모델은 실제 주행 중에 작용하는 동력 특성에 대한 차량 제원 정보를 획득, 요구되는 요소들을 산정하 여 적용한 특징이 있다. 그리고 변속모델의 경우 차량모 델의 차속과 엑셀포지션의 정보를 통하여 변속모델에서 원하는 기어로 변속하도록 하였으며, 이와 같은 동력시 스템 모델링을 통해 엔진에서 구동되어야 하는 운전점 을 적용하였다. Fig. 4는 Simulink 변속모델로 차속 및 엑셀포지션 정보를 사용하여 현재 기어 단수와 엑셀 포지 션에서의 up/down shifting의 차속 한계점을 계산하여 변 속하도록 모델링한 것을 나타낸 것이다. 그리고 CRUISE
Table 1. List of V-CAN data used in this study
System Unit Sensor
ECU
RPM Idle speed RPM Engine speed
Nm Engine torque (MAP) km/h Vehicle speed
- Gear ratio
mg/st Fuel injection quantity
Brake/ABS/
ESP
- FL wheel speed - FR wheel speed - RL wheel speed - RR wheel speed
° Steering angle sensor
Steering
RPM Vehicle speed filtering RPM Engine speed filtering
° Steering wheel angle
Fig. 3 Engine and T/M gear shifting map data calculated by V-CAN
모델은 차량, 엔진, 변속기, 브레이크, 휠, 토크컨버터 등 으로 이루어져 있고 각각의 입력 변수는 Table 2의 차량 입력데이터와 같이 세부항목으로 구성하였다.
2.2 PHEV 차량 모델(11)
Fig. 5는 PHEV 차량의 CRUISE 차량모델로써 ICEV 모델과 같이 Simulink 활용하여 변속모델을 개발하였다.
차량의 배터리 충전량을 최대한 사용하는 특징이 있는 PHEV의 경우, 주동력원인 엔진과 드라이브라인 도메인 간의 모듈을 통합한 알고리즘을 통해 EV모드, HEV모 드, 엔진모드, 회생제동모드별 주행특성을 반영할 수 있
도록 제어기를 고려하였다. 또한 본 연구에서의 PHEV 차량의 주행패턴은 배터리 SOC(state of charge) 하한치 까지 방전될 동안 EV모드로 구동을 하고, 남은 구간에 서는 엔진모드로, 회생과 방전을 번갈아하며 차량을 주 행하도록 구성하였다.
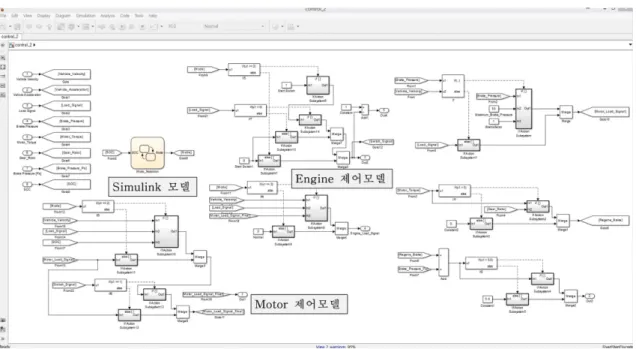
따라서 본 연구에서는 PHEV용 엔진(2.0 GDI, 최대 출력 156 PS, 최대토크 19.3 kgm)과 전기구동모터(최 고출력 50 kW, 최대토크 205 Nm) 제어를 위한 모델 과 회생제동을 위한 모델을 각각 개발하였으며, 이를 Fig. 6에 나타내었다. 본 연구에서 개발한 Simulink 기 반의 PHEV차량 전체 제어 모델은 배터리의 SOC, Table 2. Input data in CRUISE S/W for ICEV
Fig. 4 Gear shift control model based on Simulink
차속, 부하, 브레이크압, 모터토크, 기어비 등에 따라, 전기주행모드, 하이브리드주행모드, 엔진모드, 회생제
동모드를 결정하고 이에 따라 구동모터와 엔진을 제어 하도록 구성하였다.
Fig. 5. Numerical simulation model circuit for PHEV
Fig. 6. Full-circuit for Motor/Engine control model based on Simulink (PHEV)
3. 결과 및 고찰
시뮬레이션의 연비 해석 결과와 실제 연비의 비교·검 증을 위해 본 연구에서는 차량의 엔진 구동상태를 나타 내는 파라미터인 엔진회전속도를 적용하였다.
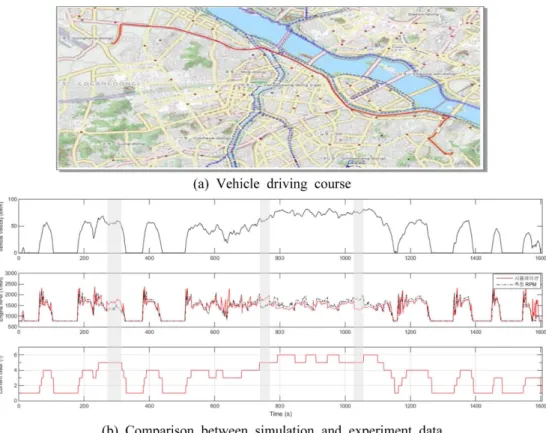
Fig. 7은 RDE만족 시험코스(공항동–노들로–상도역) 를 실제 차량으로 주행하여 얻은 차속 프로파일을 본 연구에서 개발한 CRUISE 모델에 입력하여 얻은 시뮬 레이션 결과를 나타낸 것이다. 그림에서 보듯이 시뮬레 이션 결과 차속은 실제 차속 프로파일과 정확히 일치하 였으며, 엔진회전속도를 비교해본 결과 음영 구간에서 실 도로조건의 영향이 관찰되었으며, 대부분 주행 구간 에서 매우 일치함을 알 수 있었다.
Table 3은 ICEV 모델의 인증모드에서의 해석 결과 산 출된 연료 소모량을 나타낸 것이다. 이를 바탕으로 현재 의 연비 보정식을 적용한 실제 차량의 표시 연비와 비 교할 수 있었다.
Table 4에 나타나는 결과와 같이 시뮬레이션을 통해 취득한 연비가 표시연비보다 6~9% 작게 나타남을 알 수 있었다.
앞서 언급한 것처럼, 본 연구에서 CRUISE 모델에 사 용한 연비맵이 CAN 데이터에서 측정한 연료 분사량을 바탕으로 구성되어져 있기에, 향후 차량 탑재형 이동식 연료 소모량 측정 시스템을 활용하여 실제 연료소모량 을 바탕으로 연비맵을 구현할 경우, 이의 영향은 파악할
Fig. 7 Vehicle simulation result of ICEV
Table 3. Simulation result for two driving mode Driving
Mode
Fuel consumption (L)
Driving range (km)
FTP-75 1.28 17.8
Highway 0.85 16.5
Table 4. Comparison result for fuel consumption Fuel consumption rate
(km/l) Urban Highway Combination Official level 11.4 15.1 12.8
Simulation 10.7 13.6 11.9 Deviation (%) 6.14 9.93 7.03
계 인자들에 대한 차량 연비 영향을 분석하는데 큰 문 제는 없을 것으로 판단할 수 있었다.
PHEV 시뮬레이션에 적용하기 위해 실험을 통해 측 정한 주행 데이터와 본 연구에서 개발한 CRUISE 모델 에 입력하여 얻은 시뮬레이션 결과를 Fig. 8에 나타내었 다. PHEV 차량 모델을 초기 SOC(state of charge) 90%
조건에서 주행을 시작하여 FTP-75모드 주행시험을 수 행한 결과, 전기구동만으로 가능한 주행거리가 37 km로 나타남을 알 수 있었다. 그리고 37 km구간 이후 SOC가 30%에 도달하여 엔진과 함께 구동하여 HEV 모드로 구 동함을 또한 알 수 있었다.
이를 통해 실제 PHEV 차량의 전기모터모드 최대 주 행 거리는 44 km(1회 충전시)로 표시(공인값)되어 있어, 이와 시뮬레이션 결과는 약 7 km의 차이가 있음을 알 수 있었다. 이러한 차이는 SOC 제어특성 즉, 전류의 상
태별 구동상태(EV, HEV, 엔진) 및 BMS(battery manage- ment system)의 제어로직 영향 등으로 판단되기에, 향후 이에 대한 면밀한 분석이 필요한 것으로 판단할 수 있 었다.
4. 결 론
본 연구는 차대동력계 실험을 통해 산출된 자동차에 표시된 연비와 실 주행 연비와의 격차를 분석하기위한 사전 연구의 일환으로 수행된 것으로서, 실도로 주행데 이터를 활용한 CRUISE 기반 차량 연비 해석 모델링을 통해 서로 다른 2개 동력계통 실차 대상(ICEV, PHEV) 으로 산출된 연비를 표시연비와 비교·분석한 결과를 도 출할 수 있었다. 특히, 실제 차량에 가까운 주행제어를 Fig. 8 Vehicle simulation result of PHEV
위해 Matlab Simulink를 제어기 모델로 활용함으로써 CRUISE프로그램과 연동되는 차량 주행 제어 모델의 Co-simulation 해석이 가능하여 비교적 정확한 연비 시 뮬레이션을 수행할 수 있었다. 본 연구를 수행한 결과, 다음과 같은 결론을 얻을 수 있었다.
(1) RDE만족 시험코스를 실제 차량으로 주행하여 얻 은 차속 프로파일을 본 연구에서 개발한 CRUISE 모델 에 입력하여 시뮬레이션을 통해 취득한 연비가 표시연 비보다 6~9% 작게 나타남을 알 수 있었다. 이는 본 연 구에서 CRUISE 모델에 사용한 연비맵이 CAN 데이터 에서 측정한 연료 분사량에 기인한 것으로, 향후 PEMS 기반 연비측정값과의 비교가 필요한 것으로 사료된다.
(2) 하이브리드자동차와 순수전기자동차의 주행특징 을 모두 가지는 PHEV 시뮬레이션 결과, 전기모터모드 최대 주행 거리는 약 7 km의 차이가 있음을 알 수 있었 다. 이는 SOC상태 및 BMS 제어로직 등의 영향으로 판 단된다.
후 기
본 연구는 2016년도 정부(산업통상자원부)의 재원으 로 에너지기술개발사업 지원을 받아 수행된 것이며, 이 에 깊은 감사를 드립니다.
참고문헌
(1) Ericsson, E., “Variability in urban driving patterns”, Transportation Research Part D, 5(5), 337-354, 2000.
(2) Real Driving Emission of Vehicles, European Com- mission, CARS 21 Working Group 4, 2011.
(3) Lee, T. Y., Park, S. W. and Son, J. W., “Real-time Driving Style Assessment Algorithm for Reducing Fuel Con-
sumption”, KSAE 2010 Annual Conference, KSAE10- A0352 (pp. 2035-2039), 2010.
(4) An, F., and Ross, M., “A Model of fuel Economy and Driving Patterns”, SAE Technical Paper 930328, 1993.
(5) M. Weiss, P. Bonnel, R. Hummel, U. Manfredi, R.
Colombo, G. Lanappe, P. L. Lijour and M. Sculati,
“Analyzing On-road Emissions of Light-duty Vehicles with Portable Emission Measurement Systems (PEMS)”, EUR 24697 EN ISBN 978-92-79-19072-8, 2011.
(6) Lee, S. M., Park, T. H., Son, J, H., Won, K. H. and Lee, H. C., “Development of a driver model for the analysis of fuel economy”, KSAE12-A0436, KSAE Annual Confer- ence, 2012.
(7) Lu Xi, Xu Xiangyang, Liu Yanfang, “Simulation of Gear- shift algorithm for automatic transmission based on MATLAB”, World congress on software engineering, 2009.
(8) Yoshiharu H., Mizuho, F., and Yoichi, K., “Computer Simulation of Vehicle Fuel Economy and Performance”, SAE Technical Paper 860364, 1986.
(9) P. Srinivasan, U. M. Kothalikar, “Performance Fuel Economy and CO2 Prediction of a Vehicle using AVL Cruise Simulation Techniques”, SAE Technical paper 2009-06-15, 2009.
(10) P. Srinivasan, K. S. Umashankar, U. M. Kothalikar, Anirudh Deshpande, “Optimization of Performance and CO2 Emission of a Common Rail DI Diesel Oper- ated Vehicle Using AVL Cruise”, SAE Technical paper 2010-05-05, 2010.
(11) F. Sangtarash, V. Esfahanian, H. Nehzati, S. Haddadi, M. Amiri Bavanpour, B. Haghpanah, “Effect of Differ- ent Regenerative Braking Strategies on Braking Perfor- mance and Fuel Economy in a Hybrid Electric Bus Employing CRUISE Vehicle Simulation”, SAE Tech- nical Paper 2008-06-23, 2008.