* 한국종합기술 도로공항부 상무 (Korea Engineering Consultants Corp. ․ [email protected]) ** 정회원 ․ 한양대학교 건설환경공학과 박사과정 (Hanyang University ․ [email protected]) *** 정회원 ․ 한양대학교 건설환경공학과 박사과정 (Hanyang University ․ [email protected])
**** 종신회원 ․ 교신저자 ․ 한양대학교 건설환경공학과 정교수 (Corresponding Author ․ Hanyang University ․ [email protected]) Received July 13, 2018/ revised July 21, 2018/ accepted July 27, 2018
Copyright ⓒ 2018 by the Korean Society of Civil Engineers
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/3.0)
DOI: https://doi.org/10.12652/Ksce.2018.38.5.0721
www.kscejournal.or.kr
공사 현장에서의 Machine Guidance 적용에 관한 사례연구
김완봉*ㆍ박상일**ㆍ이리호***ㆍ서종원****
Kim, Wanbong*, Park, Sangil**, Lee, Riho***, Seo, Jongwon****
A Case Study on the Application of Machine Guidance in Construction Field
ABSTRACT
Manpower in domestic construction sites is becoming more and more aging. Various methods have been devised to prevent productivity and quality deterioration of construction due to absence of skilled workers and difficulty in supplying manpower.
Especially, many researchers study various methods such as Machine Guidance (MG) and Remote Machine Control to improve productivity and quality. Although many prior studies have been conducted since the advent of MG, There is lack of field test in a difficult site to stakeout. In this study, field test of MG excavator was carried out at difficult site to stakeout, and productivity analysis and quality evaluation were conducted. As a result of the analysis of productivity, the minimum value was 20.5%, the maximum value was 56.9%, and the average productivity in 4 days was 38.3% higher than the standard product. As a result of the analysis of quality, the horizontal error ± 1cm and the vertical error ± 2cm confirmed in the previous study were verified.
Key words : Machine guidance, 3D modeling, Earthwork, Productivity 초 록
국내 건설현장의 인력은 점점 더 고령화 되고 있다. 건설기능인력의 부재 및 인력수급의 어려움으로 인한 건설공사의 생산성 및 품질저하를 막기 위한 다양한 방법들이 고안되고 있다. 특히 건설공사에 필수적인 중장비와 관련해서 Machine Guidance (MG), Remote Machine Control 등 다양한 방법을 적용하여 생산성 제고 및 품질 향상을 도모하고 있다. MG의 등장 이래로 많은 선행연구가 진행되었으나, 측설(공사 등에 있어 서 굴착 경계면, 기준선 중심선 등을 표기하는 것)이 힘든 환경에서의 현장 테스트는 아직까지 부족한 상황이다. 본 연구에서는 측설이 복잡한 현 장을 대상으로 MG 굴삭기의 현장 테스트를 진행하고 생산성 분석, 품질평가를 수행하였다. MG 굴삭기를 적용한 후 생산성을 분석한 결과 최 솟값은 20.5%, 최댓값은 56.9%, 4일 평균 생산성은 표준품셈 대비 38.3% 증가하였다. 또한 품질평가를 진행한 결과 선행연구 결과 대비 수평 오차 ±1cm, 수직 오차 ±2cm로 검증되었다.
검색어 : Machine guidance, 3D modeling, 토공사, 생산성
Construction Management
시공관리1. 서 론
1.1 연구의 배경
건설기능직에 대해서 일반적으로 3D (Difficult, Dirty, Dangerous) 직업이라는 인식이 만연하다. 이러한 인식 때문에 건설현장에서 신규인력 공급이 부족하고 기능 인력의 고령화에 따른 생산성 저하, 품질 저하 등이 발생하고 있는 실정이다(Lee et al., 2006).
2004년 185만명 이였던 건설업 취업자 수는 2012년 말 175만명으 로 약 10만명이 감소하였다. 또한 2012년 건설기능 인력 중 40대 이상이 80.7%인 것으로 조사되었다. 40대 이상 건설기능 인력의 비율은 2004년 58.8%에서 2012년 80.7%로 12년 동안 21.9%나 증가하였다(Fig. 1). 이는 기능 인력의 질적인 약화로 인한 건설현장 의 생산성 및 품질 감소를 야기할 수 있다(Sim, 2013).
앞으로 건설기능 인력의 수급은 점점 더 힘들어 질 것이다.
따라서 숙련된 건설기능 인력 감소로 인한 건설공사의 생산성 및 품질저하를 막기 위해 다양한 방법들이 고안되고 있다. 특히 건설공사에 필수적인 중장비와 관련해서 Machine Guidance (MG), Remote Machine Control 등 다양한 방법을 적용하여 생산성 제고 및 품질 향상을 도모하고 있다.
1.2 굴삭기 머신가이던스
건설공사에서 토공사는 약 20%정도를 차지하는 중요한 공정임 에도 불구하고 지난 100년간 측량, 측설, 굴착, 운반, 성토, 다짐과 같은 기본적인 절차를 통해 진행되어 왔다(Han et al., 2005).
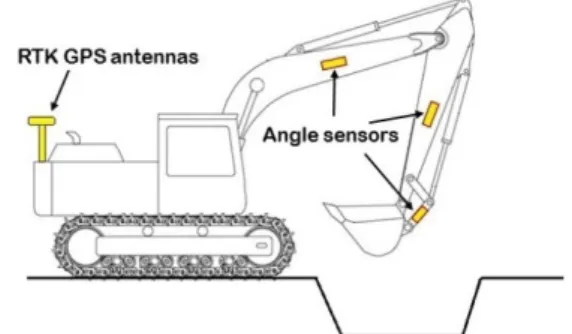
최근에 GPS장비를 활용한 MG가 등장함에 따라 측량-측설-굴착으 로 이루어지는 기존 굴착 프로세스가 더 정밀해지고 효율적인 프로세스로 변해가고 있다. 굴삭기 MG는 3차원으로 설계된 도면을 활용하여 정확한 시공을 도와주는 기술이다. 장비기사는 MG가 GPS (Global Positioning System) 위성으로부터 받은 위치정보를 바탕으로 현 위치에서 얼마나 많은 흙을 옮기는지 또는 계획 레벨까 지 얼마나 더 굴착해야하는지 등의 정보를 실시간으로 받는다
(Barrett, 2008). 굴삭기 MG의 구성은 케빈 뒤편에 설치되어 있는 GSP안테나 2개와 굴삭기 운전기사가 참고하는 모니터 단말기, 버킷 및 암에 설치되어 있는 Angle sensor로 구성된다(Yoon et al., 2016)(Fig. 2).
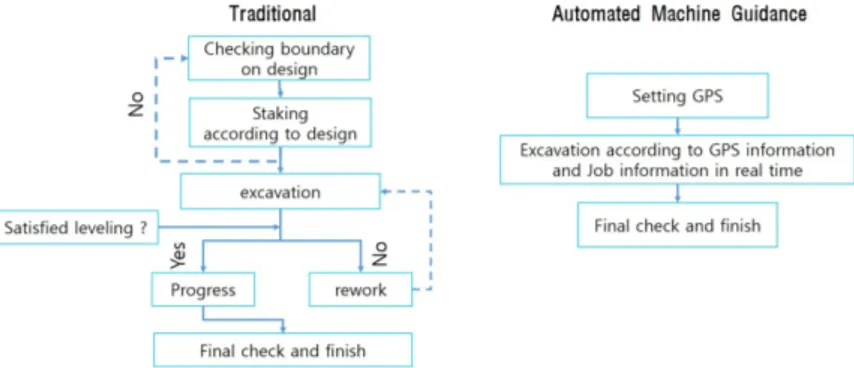
일반 굴착 프로세스와 비교할 때 MG굴삭기를 활용한 작업 프로세스는 매우 간소하다. 기본 굴착 프로세스는 측량기사가 2D 설계도면을 바탕으로 굴착경계를 체크한다. 그 후 측설을 통해서 굴착경계면을 확정 짓고 굴착을 진행한다. 굴착이 진행됨에 따라 보조인원이 굴착이 계획레벨에 도달했는지 지속적으로 체크한다.
계획레벨에 도달하지 못했거나 과굴착이 되었을 경우, 계획레벨로 맞추기 위한 제작업이 반복 진행된다. 반면에 MG의 굴착 프로세스 는 GPS장비를 굴삭기에 설치 한 후, 부착된 GPS로부터 받는 정보를 바탕으로 굴착을 수행한다. MG는 굴착작업 시작 전 별도의 측량 및 측설 작업이 필요 없으며, 시공 중에도 굴착이 계획레벨까지 잘 이루어지고 있는지 수시로 체크할 필요 없이 장비기사는 MG가 제공하는 정보에 따라 굴착을 진행하면 된다. MG 굴삭기와 일반적 인 굴삭기의 작업 프로세스는 다음과 같다(Fig. 3).
일반적으로 토공사의 계획 및 굴착작업은 현장 관리자, 장비 운전기사 그리고 측량기사의 경험 및 숙련도에 따라 생산성 및 효율이 달라진다. 대부분의 재작업은 그들이 작업을 할 때 생기는 오차에 의해서 발생하고 이는 원가 증가, 공기지연 그리고 생산성 감소로 이어진다(Han et al., 2005). 이런 단점들은 MG를 적용하여 해결할 수 있다. MG를 적용하였을 때의 장점은 다음 두 가지로 정리될 수 있다.
첫 번째, 일반적인 굴착 프로세스는 시공 전에 측량 및 측설 작업이 시행된다. 이런 작업들은 2D 설계도면을 바탕으로 진행되기 때문에 오류가 발생할 수 밖에 없다. 오류가 발생할 시 재작업을 진행해야한다. 하지만 MG 굴착 프로세스는 GPS를 통해서 실시간 으로 위치 정보 및 작업정보를 전달받기 때문에 측량 및 측설 작업이 필요하지 않다.
두 번째, 기존의 굴착은 시공 중에 지속적인 계획레벨을 확인하여
Fig. 1. Age Trend of Construction Manpower (Sim, 2013) Fig. 2. Composition of Machine Guidance System (Azar and Kamat, 2017)
야 한다. 이는 굴삭기의 유휴시간(Idle Time)을 유발하여 굴삭기의 생산성을 감소시키고, 과굴착을 할 경우 계획레벨을 맞추기 위해서 재작업이 진행되기 때문에 비용 증가 및 공기가 늘어난다. 또한 계획레벨 확인을 위해 지속적으로 시공 중 측량을 해야 하기 때문에 보조 인원이 투입되어야 한다. MG 굴착의 경우 GPS로부터 작업정 보를 실시간으로 받기 때문에 시공 중 측량을 할 필요가 없으며 측량을 위한 보조 인원이 필요 없다. 또한 재작업 발생 가능성이 줄어들고 작업의 생산성이 증가하며 굴착의 일정한 품질을 유지할 수 있다.
이를 종합하면, 기존의 굴착 프로세스와 비교해 볼 때 MG 굴착 프로세스는 굴착 작업 중 측량기사 및 보조인원 같은 인력이 줄어든다. 또한 레벨측량이 불필요하기 때문에 작업의 유휴시간을 최소화 하여 작업의 생산성이 증가한다. 마지막으로 작업의 일정한 품질을 유지할 수 있어, 재작업이 줄어들고 이는 공기 증가를 막을 수 있다(Bradley et al., 1995).
1.3 연구의 범위 및 목표
본 연구에서는 MG의 현장적용을 위해 3D 설계도면 작성부터 MG 굴삭기 투입 후 생산성 체크 및 분석, 품질 평가를 진행 하였다.
Research process는 첫 번째 MG 굴삭기에 적용할 3D 설계도면 을 만들기 위해 현장지형을 대상으로 GPS측량을 진행하였다. 측량 으로 얻어진 점 데이터를 활용하여 TIN (Triangulated Irregular
Network) 표면을 만든 후 2D 설계도면을 기반으로 시공기면을 작성한다. TIN 표면과 시공기면을 활용하여 Surface-Surface method를 통해 MG용 3D 설계도면을 작성한다(Vennapusa et al., 2015). 3D 설계도면을 작성할 때 기존 상용 프로그램이 아닌 3차원 토공모델을 만들기 위해 개발한 독자적인 모듈을 사용하였다.
3D 설계도면을 MG 굴삭기에 적용한 후 굴착 작업을 시작한다.
생산성 체크를 위해서 굴착작업을 작업시간, 유휴시간, 제외시간 (굴착을 제외한 타 작업)으로 나누어 기록한다. 굴착작업이 완료된 후 대상 지역에 레이저스캐닝을 진행하고 3D 설계도면과 레이저스 캐닝 모델을 비교하여 품질평가를 진행하였다(Fig. 4).
본 연구의 생산성 분석에 있어서 동일 현장에서 서로 다른 굴삭기 의 비교가 아닌 MG 굴삭기와 건설공사 표준품셈(KICT, 2017)을 바탕으로 계산한 굴삭기의 생산성을 비교한 것이다.
2. 관련연구
2.1 Development of Machine Guidance
1980년대부터 개인을 위한 GPS (Global Positioning System) 장비의 등장과 laser technology의 발전덕분에 측량기술은 빠르게 발전하였다(Bernold, 2002). GPS 기술은 다양한 분야에서 안정적 이고 정밀도 높은 위치정보를 즉시 제공할 수 있다(Tserng et al., 2013). 또한 real-time kinematic (RTK) GPS를 활용하여
Fig. 3. Process of Traditional Excavation and Automated Machine Guidance ExcavationFig. 4. Research Process
측량, Automated Machine Guidance, Machine Control 등에 활용되고 있다.
초기 굴삭기 MG의 연구 중 CAD-intergrated Excavation and pipe laying (Huang et al., 1997)에서는 굴삭기에 실시간으로 위치정보 및 작업정보를 주기 위해서 long range three-dimensional (3D) laser-based position measurement tool을 활용하여 초기 굴삭기 MG 모델인 Laser Guidance를 구상하였다(Fig. 5). 그러나 Laser Guidance는 3D 레이저 수신기가 레이저 전송기의 시야 상에 있어야 한다는 치명적인 단점이 있다. 예를 들어 굴삭기에 장착된 레이저 수신기가 레이저 전송기의 시야에서 사라진다면 굴삭기로 가는 실시간 정보가 중단되게 된다. 이런 단점을 해결하기 위해서 1999년 Trimble에서는 GPS 기술을 접목시킨 GPS 머신가 이던스가 개발하였다(Jonasson et al., 2002). 2000년에는 Leica에 서 RTK-GPS 기술을 접목한 머신가이던스를 출시하였다. 이후 MG 와 관련된 생산성 분석 및 경제성 분석에 관련된 연구들이 수행되었다.
2.1 Research on productivity and quality of Machine Guidance
Janasson et al.(2002)는 그레이더를 대상으로 기존의 방식과 Ultrasonic, 2D laser, 3D laser, GPS 를 머신가이던스에 접목한 방식을 각각 비교하여 생산성 분석 및 경제성 분석을 수행하였다.
이 연구에 의하면 GPS가 생산성 및 경제성이 가장 높은 것으로 분석되었다. Han et al.(2005)는 도저와 그레이더를 대상으로 simulation methodology 를 활용하여 기존의 굴착방식과 MG의 비교를 통해 생산성 분석 및 경제성 분석을 수행하였고 그 결과 생산성은 32.48%, 경제성은 22.88% 상승한 것으로 분석되었다.
Rezazadeh Azar et al.(2012)는 도저와 굴삭기를 현장에 투입하여 현장 테스트를 진행하였다. 그 결과 도저는 작업 여건에 따라 6%부 터 34%까지 생산성이 증가하였고 굴삭기는 장비의 종류에 따라 생산성이 19%부터 23%까지 생산성이 증가하였다. 또한 작업 중 측량 때문에 필요한 시간이 기존의 굴착방식에서는 작업시간의 21% 내지 30%정도 이지만, MG 굴착방식에서는 작업시간의 5%정 도 소요되었다.
MG 굴삭기의 품질평가와 관련하여 다양한 연구들이 진행되어 왔다. Miyauchi et al.(1998)의 Development of Virtual Survey Marking System for Remote Control of Construction Machinery II의 연구는 RTK GPS기반 원격 굴삭기를 활용하여 사면 시공에서 의 정확도를 테스트 하였다. 그 결과 최대 86%, 최소 78%로 측정되었으며 그 이유는 굴삭기 운전자가 현장에서 직접 운전한 것이 아닌 원격으로 조정하여 오차가 크게 발생하는 것으로 파악되 었다. Yoon et al.(2016)의 굴삭기 머신가이던스를 활용한 토공작
업 테스트 및 성능평가 연구에서 오픈-컷 굴착 방식의 수직 오차는 2.7cm로 산출되었다.
MG 의 등장 이래로 많은 선행연구가 진행되었음에도 불구하고, MG의 강점 중 하나인 측설이 힘든 환경에서의 현장 테스트는 부족한 상황이다. 본 연구에서는 측설이 복잡한 현장을 대상으로 MG 굴삭기의 현장 테스트를 진행하고 생산성 분석, 품질평가를 수행하였다.
3. Case Study : Machine Guidance 현장적용
3.1 Machine Guidance 구축
본 연구는 OO역 오염토 치환공사를 대상으로 MG 굴삭기 생산성 분석 및 품질평가를 진행하였다. MG 굴삭기 구성은 1.2절에서 언급한 것과 같이 굴삭기에 붐에 장착된 IMU (Inertial Measurement Unit) 센서, 굴삭기 몸체에 장착된 GPS 안테나 및 GPS 컨트롤러 (Fig. 5), 굴삭기 운전석에 장착된 디스플레이 장치(Fig. 6), 그리고 굴삭기의 위치정보 보정신호를 전송해주는 기지국으로 구성되어 있다.
3.2 Site overview
MG 굴삭기 투입현장은 기존의 터파기와 다르게 지표로부터 오염토를 치환할 깊이까지 굴착이 진행한다. 전반적으로 현장의 지표면이 기울기를 갖기 때문에 시공기면 역시 기울기를 갖게
Fig. 5. GPS Controller & GPS Antenna
Fig. 6. Display Device
된다. 또한 공사 유형의 특징 상 터파기의 면이 비정형적인 모양이 고 도면에 맞춰서 터파기를 진행해야하는 어려움이 있다. 비정형적 인 굴착경계는 측설 하는데 난해하고 시간 소모도 클 것으로 예상되 어 MG 굴삭기 투입에 있어서 최적의 조건을 갖는 현장이라고 판단된다.
적용 현장의 개요는 다음 Table 1과 같다.
3.3 3D model for Machine Guidance
MG 굴삭기를 현장에 투입하기 전, 적용현장을 대상으로 MG 굴삭기용 3차원 도면을 작성하였다. 3차원 도면을 작성하기 위해서 적용현장의 점군 데이터를 획득한 후 TIN으로 구성된 원지형(Fig.
7)을 작성하여야 한다. 원지형 데이터를 작성하고 2차원 설계도면 (Fig. 8)을 바탕으로 시공기면(Fig. 9)을 작성한다. 적용현장의 경우 오염토 치환공사의 특성상 원지반의 형상과 시공기면의 형상 이 동일하다. 따라서 2차원 설계도면에 형성되어 있는 시공기면(z값 제외)과 중복되는 등고선의 높이 값을 각 절점에 입력한 후, 해당 심도만큼 쉬프팅(Shifting)하여 작성하였다. 시공기면의 정확성을 높이기 위해서 등고선의 주 간격 10cm, 보조 간격 5cm로 설정하였
다. 3차원 도면을 작성하기 위한 순서는 다음 Fig. 10과 같다.
원지반과 시공기면이 준비한 후, 3차원 토공모델을 작성하기 위해 개발한 별도의 모듈을 활용하여 3차원 모델을 작성하였다.
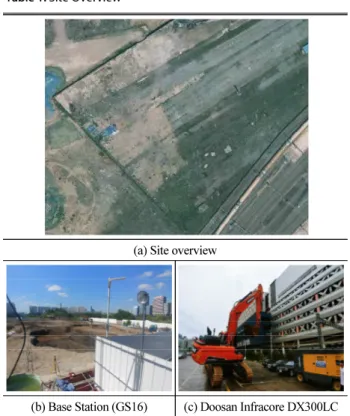
Table 1. Site Overview
(a) Site overview
(b) Base Station (GS16) (c) Doosan Infracore DX300LC 1. Location : OO-gu, Seoul, Republic of korea (a)
2. Input equipment: Base station (GS 15) (b), Doosan Infracore DX300LC with MG (c)
3. Special: Excavation boundary as presented in 2D drawing, excavation proceeds from the surface to the final depth.
Fig. 7. TIN Surface
Fig. 8. 2D CAD Design
Fig. 9. Formation Level
Fig. 10. Process of 3D Design
이 모듈은 Polyline으로 작성된 폐합도형을 TIN으로 구성된 3차원 면으로 변환한 후 시공기면으로부터 원 지형까지의 거리를 계산하 고 시공기면의 경계를 나타내기 위한 벽을 만들어 MG 굴삭기 운전기사에게 편의성 있는 도면을 제공한다(Fig. 11).
3.4 Productivity about Machine Guidance excavator 위와 같은 프로세스를 거쳐 만들어진 3차원 설계도면을 MG 굴삭기에 적용하여 현장적용 사례연구를 진행하였다. 현장 작업은 굴착지역에서 굴삭기(Doosan Infracore DX300LC)가 15ton 덤 프트럭에 직접 상차를 하는 방식으로 진행되었다. 생산성 분석 프로세스는 다음 Fig. 12과 같다.
MG 굴삭기의 생산성 분석에 앞서 기존 방식의 굴삭기의 생산성 을 건설공사 표준품셈(KICT, 2017)을 참고하여 계산하였다(Eq.
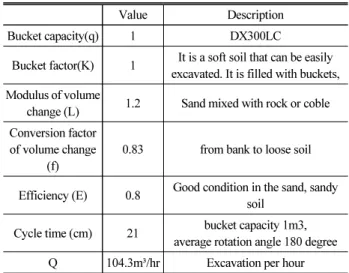
(1)). 적용현장을 고려하였을 때 각 계수의 값은 다음 Table 2와 같이 결정하였다. 굴삭기의 작업량에 관련된 변수 들은 표준품셈 및 장비의 제원을 참고하여 설정하였는데, 버킷용량의 경우 1m
3, 버킷용량과 회전각을 고려하여 1회 싸이클 시간은 23초, 굴착 구간이 용이하게 굴착할 수 있는 연한 토질로서 버킷에 산적으로 가득 찰 때가 많은 조건이 좋은 모래여서 K=1, L=1.2,로 설정하였다.
또한 작업효율은 토사의 상태가 양호하기에 0.85로 설정하였으나 터파기 공사의 경우 0.05를 감해주어 최종적으로 0.80으로 설정하였 다. 위 값들을 사용하여 산출된 시간당 작업량은 104.3m
3/hr이다.
× × × × (1)
sec
굴착한 흙의 물량은 건설공사 표준품셈(KICT, 2017)을 참고하 여 15ton 덤프트럭의 운반횟수를 역산하여 계산하였다(Eq. (2)).
적용현장을 고려하였을 때 각 계수의 값은 다음 Table 3과 같이 결정하였다. 덤프트럭의 단위 운반량에 관련된 변수 들은 현장 값 및 표준품셈 값을 사용하였는데 단위중량 같은 경우 현장에서 제공받은 값 γ
t=1.8t/m
3을 사용하였고, 현장의 지반의 대부분은 모래 및 자갈이 섞인 모래였다. 체적변화율 같은 경우 현장 지반이 암괴나 호박돌등이 섞인 모래로 구성되어 있어 표준품셈에서 제시 한 값 L = 1.2를 사용하였다. 위의 조건들을 토대로 덤프트럭의
Fig. 11. 3D Design at Depth 1mFig. 12. Process of Productivity
Table 2. Factor of Productivity According to Korean Standard
Value Description
Bucket capacity(q) 1 DX300LC
Bucket factor(K) 1 It is a soft soil that can be easily excavated. It is filled with buckets, Modulus of volume
change (L) 1.2 Sand mixed with rock or coble Conversion factor
of volume change (f)
0.83 from bank to loose soil
Efficiency (E) 0.8 Good condition in the sand, sandy soil
Cycle time (cm) 21 bucket capacity 1m3, average rotation angle 180 degree Q 104.3m³/hr Excavation per hour
Table 3. Factor of Capacity of Dump Truck According to Korean Standard
Value Description Unit weight of soil in nature 1.8 Value in field
Load weight of dump truck 15ton 15ton dump truck Conversion factor of volume
change 1.2 Sand mixed with rocks or hump stones Load capacity of dump truck 10m3 Calculated according to
Standard
1 회 적재량 m
3은 10m
3로 계산되었다.
×
(2)
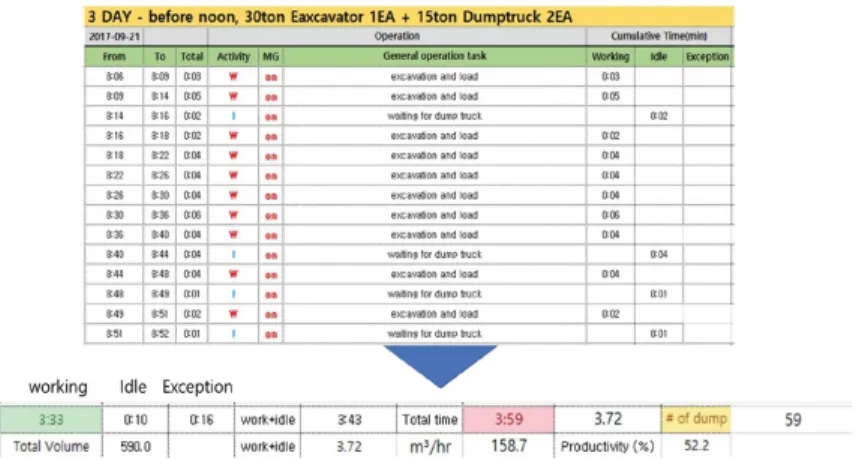
현장에 MG 굴삭기를 투입한 후 각각 작업시간, 유휴시간, 제외
시간으로 구별하여 작업 시간을 체크하였다. 작업시간은 굴삭기가 굴착작업을 하여 덤프트럭에 상차하는 시간, 유휴시간은 굴착 작업 을 한 후 덤프트럭이 돌아올 때 까지 대기하는 시간, 정지 시간 및 굴착구역으로 이동하는 시간이다. 그리고 제외시간은 굴삭기가 굴착작업과 관계없는 작업을 하는 시간이다. 다음 Fig. 13을 보면 현장 작업 시간을 각각 구별하여 기록하고 상차 회수를 기록한 것을 확인할 수 있다. 이를 바탕으로 MG 굴삭기의 시간당 작업량을 계산하였다. 생산성 체크는 총 4일간 진행되었으며 투입 장비군은 굴삭기 한 대와 덤프 두 대 또는 굴삭기 한 대와 덤프 한 대가 투입되었다. 생산성을 분석한 결과 최솟값은 20.5%, 최댓값은 56.2%, 4 일 평균 생산성은 표준품셈 대비 38.3% 증가하였다.
자세한 값은 다음 Table 4와 같은 결과를 산출되었다.
Fig. 13. Working, Idle, Exception Time for Calculating Productivity
Table 4. Result of Analysis of Productivity (Continue)
Date Equipment combination Working Idle Exception
First day before noon
Excavator+15ton dump 2 2:40 0:03 1:23
Working # of dump Volume of excavation Q(m3/hr) Productivity
2:43 34 340 m3 125.2 20.0%
Date Equipment combination Working Idle Exception
First day after noon
Excavator+15ton dump 2 3:55 0:06 0:10
Working # of dump Volume of excavation Q(m3/hr) Productivity
4:51 54 540m3 134.4 28.9%
Date Equipment combination Working Idle Exception
Second day before noon
Excavator+15ton dump 2 3:46 0:10 0:21
Working # of dump Volume of excavation Q(m3/hr) Productivity
3:56 57 570m3 144.9 38.9%
Date Equipment combination Working Idle Exception
Second day after noon
Excavator+15ton dump 1 0:49 0:24 1:38
Working # of dump Volume of excavation Q(m3/hr) Productivity
1:13 16 160m3 131.5 26.1%
생산성 분석 결과 값으로 유추해 볼 때, MG 굴삭기의 생산성에 영향을 끼치는 요인들은 3가지가 있다.
첫 번째, 운전자의 MG 적응도이다. MG 굴삭기 투입 첫날 생산성 은 25.3%로 산출되었는데, 2일차에는 35.9%, 3일차에는 53.9%로 비약적으로 증가함을 알 수 있다. 이는 굴삭기 운전자의 MG에 적응도가 생산성에 영향을 끼치는 요인이라는 것을 의미한다.
두 번째, 장비 조합에 따른 유휴시간이다. 2일차 오전 굴삭기 한 대와 덤프 두 대가 투입되었을 때 MG의 생산성은 38.9%였지만, 2 일차 오후 굴삭기 한 대와 덤프 한 대가 투입되었을 때 MG의 생산성은 26.1%로 약 13%정도 하락하였다. 이는 장비조합으로 인한 유휴시간의 증가 때문인 것으로 판단되며, MG의 생산성에 영향을 끼치는 요인 중 하나가 장비 조합군이라는 것을 의미한다.
세 번째, 굴착지형의 복잡도이다. 1, 2, 3일차는 복잡하지만 좁고 깊은 구덩이를 파는 작업이였다면, 4일차에는 넓고 얕은 구덩 이를 파는 작업 이였다. 1, 2, 3일차와는 다르게 4일차는 지속적으로 굴착구간의 경계면을 잡아가며 작업이 진행하였기에 3일차에 비해 서 생산성이 감소하였다. 이는 측설의 복잡성과 유사하며 MG의 생산성에 영향을 끼치는 요인 중 하나라는 것을 의미한다.
결론적으로, MG 굴삭기 투입에 있어서 기존 표준품셈 대비 4일간 평균 38.3% 생산성이 증가하였고 생산성에 영향을 끼치는 요인들은 굴삭기 운전자의 MG 적응도, 장비조합, 굴착지형의 복잡
도로 파악된다.
3.5 Quality about Machine Guidance excavator MG의 정확도를 검증하고자 MG 굴삭기가 시공한 굴착 구간에 대해서 품질평가를 진행하였다. MG의 정확도를 검증하기 위해서 먼저 굴착이 완료된 구간을 대상으로 레이저 스캐닝을 진행하였다.
레이저 스캐닝으로 얻은 모델과 3D 설계도면을 단면, 부피, 깊이에 관해서 비교 분석하였다. Fig. 14는 품질평가를 진행하기 위한
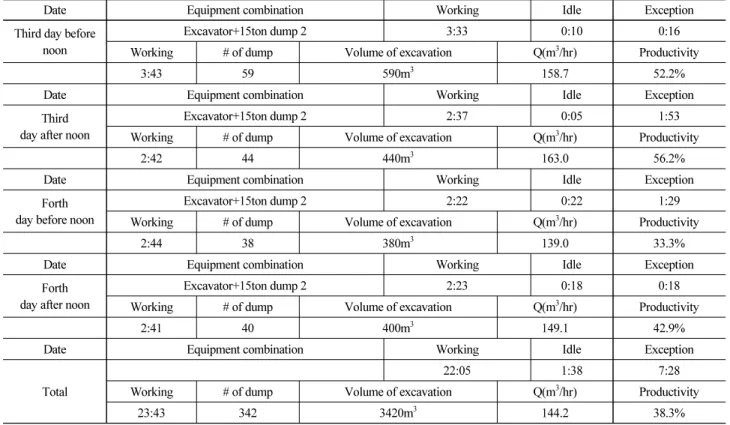
Table 4. Result of Analysis of Productivity (Continue)Date Equipment combination Working Idle Exception
Third day before noon
Excavator+15ton dump 2 3:33 0:10 0:16
Working # of dump Volume of excavation Q(m3/hr) Productivity
3:43 59 590m3 158.7 52.2%
Date Equipment combination Working Idle Exception
Third day after noon
Excavator+15ton dump 2 2:37 0:05 1:53
Working # of dump Volume of excavation Q(m3/hr) Productivity
2:42 44 440m3 163.0 56.2%
Date Equipment combination Working Idle Exception
Forth day before noon
Excavator+15ton dump 2 2:22 0:22 1:29
Working # of dump Volume of excavation Q(m3/hr) Productivity
2:44 38 380m3 139.0 33.3%
Date Equipment combination Working Idle Exception
Forth day after noon
Excavator+15ton dump 2 2:23 0:18 0:18
Working # of dump Volume of excavation Q(m3/hr) Productivity
2:41 40 400m3 149.1 42.9%
Date Equipment combination Working Idle Exception
Total
22:05 1:38 7:28
Working # of dump Volume of excavation Q(m3/hr) Productivity
23:43 342 3420m3 144.2 38.3%
Fig. 14. 3D Design Model
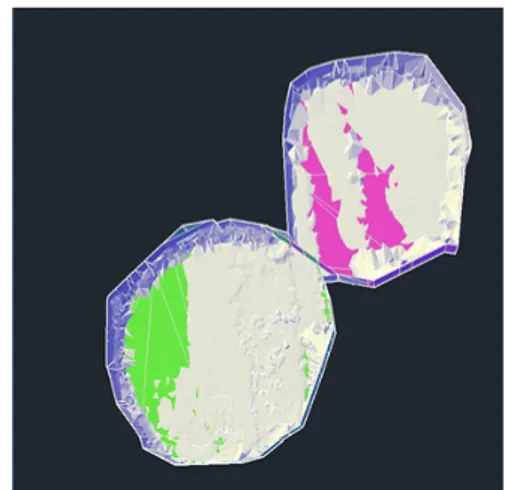
시공 구간의 3D 설계도면이고 Fig. 15는 시공이 완료된 후 레이저 스캐닝을 수행한 후 획득한 레이저 스캐닝 모델이다. 두 모델을 중첩하여 굴착이 어떻게 진행되었는지 확인해 보았다(Fig. 16).
Fig. 16을 보면 3D 설계도면과 레이저 스캐닝 두 모델을 겹쳐보았을 때 거의 일치함을 확인하였다. 또한 3D 설계도면과 레이저 스캐닝 의 부피를 비교해보았을 때 그 차이는 64.97m
3으로 산출되었다 (Fig. 17). 부피 차이 산출 값이 fill로 나오는 것은 3D 설계도면을 기준으로 레이저 스캐닝 모델을 비교했을 때 산출 프로그램이 부족한 부분을 메꾸는 것으로 인식했기 때문이다. 단면과 부피로 품질평가를 진행했을 때 MG 굴삭기에 의한 시공품질의 정확도는 각각 99.9%, 93.3%로 분석되었다. 단면의 경우 3D 설계도면과 레이저 스캐닝 모델이 수치적으로 일치함을 확인하였고 부피의 경우 6.7%의 오차를 확인하였다(Table 5).
부피를 비교할 때 오차가 6.7%가 난 원인은 해당 굴착 구간이 3m 의 깊이를 갖는 구간인데, 지반의 대부분이 모래였기에 사면
붕괴를 막기 위해서 약간 기울기를 주어 굴착하였고, 이러한 이유 때문에 오차가 발생한 것으로 판단된다. 3D 설계모델과 레이저 스캐닝 모델을 비교하여 확인해볼 때 굴착경계 부분이 덜 파진 것을 확인할 수 있었다(Fig. 18).
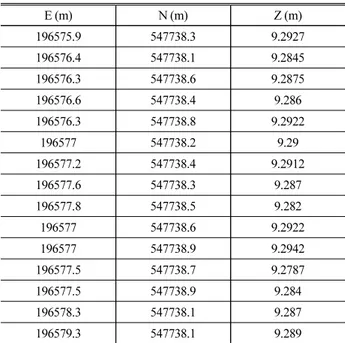
수직 정확도에 대한 평가는 해당 굴착구역의 중심부를 기준으로 3D 설계도면과 레이저 스캐닝 모델을 비교하였다. 3D 설계도면의 평균 깊이는 9.260m (Fig. 19)고 레이저 스캐닝 모델의 Z값은 Table 6에서 확인할 수 있다.
3D 설계도면과 레이저 스캐닝의 Z 값의 품질평가를 진행하였을 때 오차는 약 0.02m로 확인되었다. 두 모델을 비교해 보면, 3D 설계도면의 평균값은 9.26m. 레이저 스캐닝 모델의 최댓값은 9.2927m, 최솟값은 9.2787m, 평균값은 9.28788m로 오차는 약 0.02m 더 굴착 한 것으로 계산되었다.
품질평가를 종합하면, 3D 디자인 모델과 레이저 스캐닝 모델의 면적은 거의 비슷했으나, 부피에서 약 6.7%의 오차가 발생되었고
Fig. 15. Laser Scanning Model Fig. 16. Overlap Laser Scanning on 3D Design ModelFig. 17. Comparing 3D Design Model with Laser Scanning Model
Table 5. Result of Quality of Volume and Area
Area (m2) Volume (m3) Quality of Area (%) Quality of volume (%)
Design 324.92 974.76
99.9% 93.3
Laser sanning 324.91 909.79
수직 오차에서 약 +0.02m 의 차이를 보였다. 본래 시공 시 사면의 안식각을 고려하여 설계를 해야지만 현장의 특이성(오염토 치환을 위해서 조사기관에서 나온 결과 그대로 굴착)으로 안식각을 고려하
지 않고 설계하였다. 이러한 이유로 모래로 구성된 지반에서 3m 깊이로 굴착을 할 경우 사면의 붕괴가 우려되어 일정부분 사면을 주어 시공을 진행하였기 때문에 오차가 발생하였다.
4. 결 론
본 연구에서는 기존 사례연구에서 검증이 부족했던 측설이 어려 운 비정형 단면에서의 MG 현장적용 사례연구를 진행하였다. 현장 투입을 위해서 등고선 데이터를 활용하여 2차원 설계도면 데이터에 Z값을 기준으로 5cm 마다 절점을 부여하여 시공기면을 작성하고 3D 디자인 모델을 작성하였다. 이는 시공기면이 원지형과 동일한 형태로 구성되며 기울기를 갖는 면으로 작성된다. 또한 오염토 치환현장의 특성상 굴착 단면의 모양이 일정하지 않아 측설이 어려운 토공현장에서의 MG 굴삭기의 성능을 평가하기에는 최적의 현장이다.
MG 투입한 후 생산성을 분석한 결과 최솟값은 20.5%, 최댓값 은 56.9%, 4일 평균 생산성은 표준품셈 대비 38.3% 증가하였고 이를 통해 MG의 생산성에 영향을 끼치는 요인들을 파악할 수 있었다. 첫 번째 사용자의 MG에 대한 적응도이다. 이는 MG 굴삭기 투입 후, 시간이 지남에 따라 생산성이 증가하는 것을 토대로 추측할 수 있다. 두 번째는 장비조합의 중요도이다. 이는 기존의 굴삭기 또한 마찬가지지만, MG 굴삭기의 경우 이 점은 더욱 강조된다. MG 굴삭기는 별도의 측량 및 측설에 대한 시간을 감소시킬 수 있기 때문에 최적의 장비 조합군을 도출해 내어 굴삭기 가 멈추지 않게 하는 것이 기존의 굴삭기보다 더욱 중요하다.
마지막으로 굴착 단면이 복잡할수록 생산성은 감소하게 될 것이다.
이는 측설이 복잡한 구간에서 측설을 할 때 시간 소모가 더 큰 것과 같은 이유이다.
MG 굴삭기가 시공한 구간을 대상으로 품질평가를 진행하였을 때 선행연구에서 확인했던 수평 오차 ±1cm는 굴착 단면으로 검증하 였고, 수직 오차 ±2cm는 굴착 깊이로 검증하였다.
감사의 글
이 성과는 2018년도 정부(과학기술정보통신부)의 재원으로 한 국연구재단의 지원을 받아 수행된 연구임(No. NRF-2018R1A 5A1025137).
Fig. 18. Cause of Error About Difference Volume
Fig. 19. Height of 3D Design Model
Table 6. Value of Z About Mid of Laser Scanning Model
E (m) N (m) Z (m)
196575.9 547738.3 9.2927
196576.4 547738.1 9.2845
196576.3 547738.6 9.2875
196576.6 547738.4 9.286
196576.3 547738.8 9.2922
196577 547738.2 9.29
196577.2 547738.4 9.2912
196577.6 547738.3 9.287
196577.8 547738.5 9.282
196577 547738.6 9.2922
196577 547738.9 9.2942
196577.5 547738.7 9.2787
196577.5 547738.9 9.284
196578.3 547738.1 9.287
196579.3 547738.1 9.289
Table 7. Result of Quality of Height
Max (m) Min (m) Mean (m) Error
Design 9.260 About
0.02m Laser scanning 9.2927 9.2787 9.28788