1. 서 론
수상함에서는 수중에서 각종 활동을 위하여 어떠한 예인체를 투 하하여 사용하고 비사용 시에는 선체로 다시 인양하며, 이를 위해 투하/인양을 위한 장치가 필요하다. 이 장치를 overboarding unit라 고 하며 건설, 조선, 컨테이너의 적재, 수중 로봇의 투하 및 인양 등의 다양한 목적으로 사용되는 크레인(crane) 구조가 적용된다.
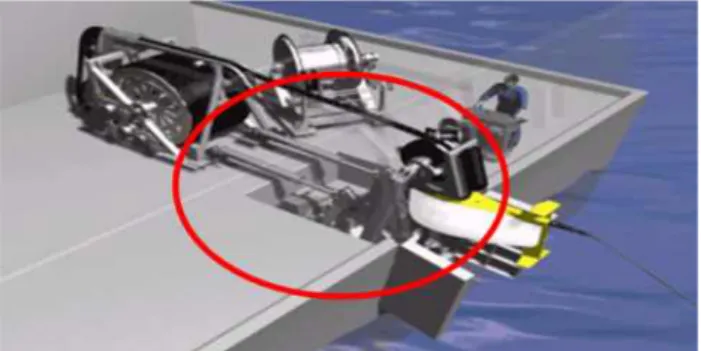
프랑스, 독일, 미국 등 해외에서는 투하/인양 장치를 이미 개발하 여 보유한 국가가 존재하나 국내에서는 아직 이러한 장치에 대하여 설계 및 개발이 진행 중인 상태이다. Fig. 1은 크레인 구조가 적용 된 overboarding unit가 동작하는 모습을 나타낸다.
Fig. 1에서, ①과 같이 피스톤 로드(piston rod)가 전진하면 ②와 같이 링크가 회전하고 ③과 같이 끝단의 링크가 아래로 내려간다.
내려간 상태에서 피스톤 로드를 후진시키면, 반대로 끝단의 링크가 Special Issue : SNUT Capstone Design
예인체의 투하 및 인양 자동화를 위한 사변형 Overboarding Mechanism의 최적설계
강석정a, 정원지a*, 박성학a, 최종갑a, 김효곤b, 이준구cOptimal Design of Quadrilateral Typed-Overboarding Mechanism for Drop/Lift Automation of Towed Object
Seok Jeong Kanga, Won Jee Chunga*, Seong Hak Parka, Jong Kap Choia, Hyo Gon Kimb, Jun Ku Leec
a School of Mechanical Engineering, Changwon National University, 20-1, Changwondaehak-ro, Uichang-gu, Changwon, Gyeongnam-do, 51139, Korea
b Field Robotics R&D Division,
39, Jigok-ro, Nam-gu, Pohang, Gyeongbuk-do, 37666, Korea
c Agency for Defense Development,
Jinhae P.O. Box 18, Jinhae-gu, Changwon, Gyeongnam-do, 51678, Korea
ARTICLE INFO ABSTRACT
Article history: A crane is typically used as a means to lift and load equipment or materials. A surface vessel uses a towed object for underwater activity. Such a mechanism for dropping and lifting of equipment is necessary, and is called an overboarding unit. The present study is focused on the overboarding unit used for a crane structure. This paper deals with new overboarding mechanism design and GA-based MATLAB® optimization. By using a quadrilateral link mechanism, it is possible to set the constraint function for optimizing the GA method. The optimization with MATLAB® is followed by the SolidWorks® simulation and verification. When applying the proposed mechanism, the operator is expected to have a big advantage in safety and efficiency of operations. Furthermore, the technology developed in this study will be helpful in similar circumstances and in the proposed mechanism.
Received 25 October 2016 Revised 19 December 2016 Accepted 29 December 2016
Keywords:
Genetic algorithm (GA) Quadrilateral linkage Optimization
Overboarding mechanism
* Corresponding author. Tel.: +82-55-213-3624 Fax: +82-55-263-5221
E-mail address: wjchung@changwon.ac.kr (Won Jee Chung).
올라간다.
액추에이터 로드(actuator rod)의 전/후 움직임으로 링크 구조물 이 기울어지는 것을 볼 수 있다. 링크 구조물은 갑판(deck)의 바닥 면에 고정되어 있기 때문에 가로 및 세로 방향의 움직임은 고려하 지 않고, 기울어지는 각도에 따른 링크 구조물의 높이가 설계조건 이 된다.
대표적인 overboarding unit로는 ATLAS사의 장비[1], THALES 사의 장비[2], Rolls-Royce사의 장비[3]가 있으며, 서로 다른 메커니 즘(mechanism)과 링크 구조(linkage)를 가지고 있다. Table 1은 각 장비를 비교하여 나타내고 있으며, 각 장비의 모습은 Fig. 2, Fig. 3, Fig. 4에서 나타내고 있다.
ATLAS 장비는 1-link type으로 구성되어 있기 때문에 링크 구 조물의 구동 시 하나의 액추에이터만 사용하여 액추에이터 파워팩 과 제어해야 하는 수가 적고, 4절 링크를 이용하여 링크 구조물의 동작 각도가 180° 이내이기 때문에 특이점이 발생하지 않는다. 선 미 실외에 설치됨에 따라 최대 높이의 제한이 없지만 선박의 종류 에 따라 해수면으로부터의 높이가 높아질 수가 있기 때문에 이 경 우 단일 링크만을 이용하여 해수면까지 내리기 위해서는 링크의 길이가 길어져야 한다는 단점이 있다. 장비가 선박 안쪽으로 들어 오지 않기 때문에 예인체에 cable을 연결하는 작업을 할 때의 위험 성도 존재한다.
THALES 장비는 1-link + sliding type으로 구성되어 있다.
Fig. 5와 같이 선박 안쪽으로 링크 구조물이 들어갈 수 있게 추가되 어 있어 ATLAS 장비의 단점인 예인체에 cable의 연결 작업 수행 시의 위험성을 해결하였다. 실내에 설치되어 있지만 액추에이터가 지렛대 원리로 적용되어 링크 구조물의 구동 시 높이의 제한이 없 고 링크 구조물의 동작 각도가 90° 이내이기 때문에 특이점이 발생 하지 않는다. 다만 해수면까지 닿기 위해서는 링크의 길이가 길어 져야 한다는 단점이 있다.
Rolls-Royce 장비는 2-link type으로 ATLAS 장비의 링크 길 이가 길어져야 된다는 단점을 보완한 장비이다. 실내공간에 설치 시 천장 높이 제한의 해결을 위해 하나로 되어있던 링크를 한번
꺾어 2-link type으로 만든 방식으로 높이 제한에 자유롭다는 장점 이 있다. 하지만 예인체 인양 시 선체 실내공간으로 완전히 넣기 위해 두 번째 링크를 뒤쪽으로 충분히 넣어야 실내 공간 안으로 수납이 가능하며, 완전 수납을 위해 두 번째 링크가 만족해야 하는 동작 범위가 커져야 한다. 동작 범위가 너무 커지면 특이점이 발생 하여 완전수납이 불가능하다는 단점이 있다. 또한 2-link type으로
ATLAS’s Equipment
THALES’s Equipment
Rolls-Royce’s Equipment Install location Ship outside Ship interior Ship interior
Link
mechanism 1-link 1-link + Sliding 2-link Range of
motion Within 180° Within 90° More than 180°
Table 1 Analysis of existing overboarding units
Fig. 2 ATLAS’s overboarding unit
Fig. 3 THALES’s overboarding unit
Fig. 4 Rolls-Royce’s overboarding unit Fig. 1 Operation of the overboarding mechanism
사용하게 되면 해수면까지의 높이를 만족하지 못해 선체 바닥을 파는 등의 선박개조가 필요하다는 단점이 있다.
본 논문은 위에서 언급하였던 세 가지 대표적인 장비의 장점은 살리고 단점은 보완하는 overboarding unit의 설계 및 최적화에 대한 방안을 제시하고자 한다. 구체적으로 수상함에 장착되는 사변 형 형태의 크레인 구조 overboarding unit를 설계하며, 완전히 수 납되고 선체 환경에 간섭이 없으면서 최적의 토크-각도 특성을 가 질 수 있도록 MATLAB®을 이용한 GA(genetic algorithm) 방식 으로 최적화된 메커니즘을 제안한다.
2. 사변형 메커니즘 설계
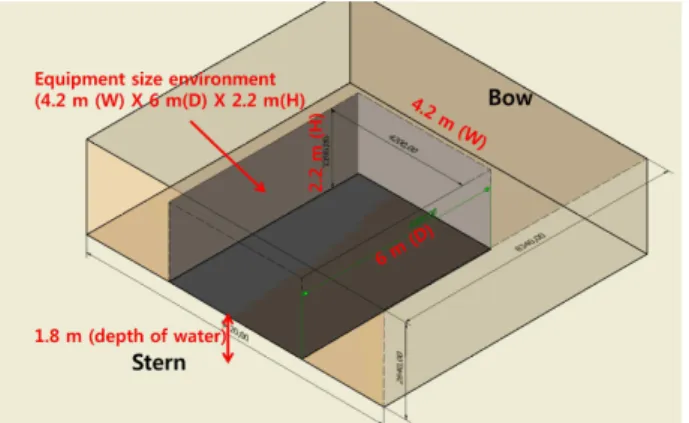
Fig. 5는 overboarding unit가 설치될 선박의 실내 제원을 나타 낸다. 실내 공간의 크기는 4.2 m(W)×6 m(D)× .2(H)이고 해수면 으로부터의 높이는 1.8 m이다. 선체의 구조 변경 없이 선체 실내 공간에 설치할 수 있고, 예인체를 실내 공간 안으로 완전히 수납 이 가능한 overboarding mechanism을 개발하면 장비의 운용 및 유지관리의 효율성을 크게 개선할 수 있다.
본 논문에서는 이러한 이점을 가진 메커니즘을 Fig. 6과 같이 제안한다. 제안하는 overboarding mechanism은 사변형링크 구조 를 이용한 장비로 예인체의 투하/인양 작업 시 선체 내부 천장(2.2 m)과의 간섭이 없고 최대한 예인체를 해수면(1.8 m)까지 내릴 수
있는 구조로 되어 있다. 기존의 2개의 액추에이터를 이용하는 방식 (Rolls-Royce 장비)의 단점을 보완하고 윈치의 작동에 대한 간섭 을 제거하기 위하여 사변형 메커니즘이 고안되었고, 단일 액추에이 터만으로도 안정적으로 운용이 가능하게 하였다.
3. 메커니즘 기구학 모델 설계
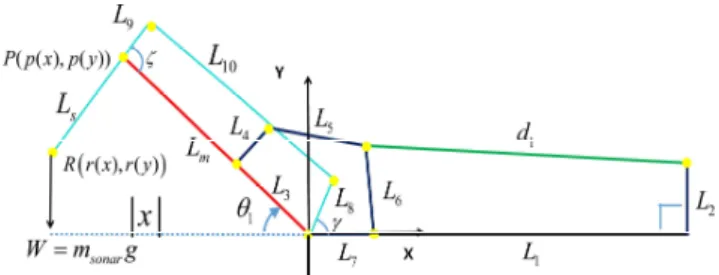
Fig. 7은 메인링크의 기구학적 설계를 위하여 일반화한 그림 이다. 여기서 ~ 은 메인 링크 및 4절 링크를 나타낸다. 은 메인 링크의 액추에이터 로드의 길이를 표현한 것이며, 4장에서 최 적화를 진행할 때 액추에이터 로드의 최소 길이인 에서 최대 신 장 길이인 까지 움직이면서 그에 따라 메커니즘이 움직이기 위 해 필요하다.
Fig. 7에서 값의 길이 변화에 따른 메인링크 각도 은 식 (1)과 같다.
(1) 여기서,
cos
cos
tan
여기서,
tan
cos
cos Fig. 5 Installation space of the overboarding mechanism
Fig. 6 Simple model of new overboarding mechanism Fig. 7 Schematic drawing and kinematic parameters of main link
액추에이터의 출력 토크는 식 (2)와 같으며, 큰 값의 토크암 (torque-arm)을 가지는 메커니즘을 이용하면 큰 출력 토크를 구할 수 있기 때문에 토크암을 크게 하는 값을 찾을 수 있도록 목적함수 를 설정한다. 액추에이터 로드암(rod-arm)에 대한 토크암은 식 (3) 과 같으며, 최적화를 수행할 때의 목적함수로 토크암을 크게 하는 값을 찾기 위하여 사용된다.
∙ (2)
여기서, 는 예인체의 무게를 나타낸다.
sin
sinsin
(3)
여기서,
cos
cos
사변형링크 메커니즘에서 보았을 경우, 식 (4)~(6)과 같이 3가지 경우로 나누어 볼 수 있다.
(4)
(5)
(6)
식 (4)와 같은 경우, 사변형 메커니즘의 기구학적 설계를 위해 일반 화한 그림은 Fig. 8과 같다. 점에서 지면에 수직으로 선을 내리고, 이 선이 와 이루는 각도를 라 하면 는 식 (7)과 같이 나타낼 수 있다.
(7)
여기서,
여기서,
cos
cos
cos
여기서,
cos 한편, 끝점 에 대한 수식은 식 (8)과 같다.
sin
(8)
cos
끝점 를 구하기 위해서는 점 가 필요 하고, 이는 점 를 이용하여 구할 수 있다. 점
의 좌표는 식 (9)와 같이 나타낼 수 있다.
cos
(9)
sin 여기서,
여기서,
cos
여기서,
cos 사변형링크 메커니즘이 식 (5)와 같은 경우, 사변형 메커니즘을 일반화 도시한 그림은 Fig. 9와 같다. 이때의 에 대한 수식은 식 (7)과 같으나, 에 대한 수식은 식 (10)과 같이 변환된다.
Fig. 8 Schematic drawing and kinematic parameters of quadrilateral link (θ1<π-g)
(10) 나머지 , , , 에 대한 계산식은 식 (7)과 동일하다.
사변형링크 메커니즘이 식 (6)과 같은 경우, 사변형 메커니 즘을 일반화 도시한 그림은 Fig. 10과 같다. 이때의 에 대한 수식은 식 (7)과 같으나, 에 대한 수식은 식 (11)과 같이 변환 된다.
(11)
여기서,
cos
cos
여기서,
4. 최적화를 위한 구속 함수(constraint function) 설정
제안한 메커니즘이 선체의 환경에서 메커니즘의 설치 및 구동에 대하여 간섭이 없으면서 높은 효율의 토크-각도 특성을 갖도록 링 크 길이(, , , , , , , , , , , ) 및 각도 ()와 액추에이터 길이()를 최적화해야 할 필요가 있다.
Fig. 11은 제안하는 메커니즘을 목적함수에 대하여 나타내고 있 으며, 구조물의 설계변수는 식 (12)와 같다.
(12)
는 (액추에이터의 스트로크 길이)에 대한 함수이며, 은 액추에 이터 로드의 값을 나타낸다. 특히 의 최소값과 최대값은 식 (13) 으로 표현된다.
min
(13)
max
는 액추에이터에서 스트로크 길이에 포함되지 않는 상수로 본 연구에서는 0.3 m로 설정하였다.
예인체의 하중에 따른 부하 토크가 최대가 되는 지점은 식 (8)에 서 x의 절댓값이 최대가 되는 지점이다. 이 때 액추에이터의 토크 암()을 식 (14)와 목적함수로 두어 요구 부하 토크가 최대가 될 때 액추에이터가 출력하는 토크가 최대화되게 유도하였다.
(14)
여기서,
max
max는 의 절대값이 최대일 때 의 값을 의미한다. 투하 /인양 작업에 대하여 선체에 대한 간섭이 없도록 하기 위해 식 (15)~(18)과 같이 최적화 구속 함수를 정의한다.
Fig. 9 Schematic drawing and kinematic parameters of quadrila- teral link (θ1<π-g)
Fig. 10 Schematic drawing and kinematic parameters of quadrila- teral link (θ1<π-g)
Fig. 11 Drawing on the parameters of the objective function of the new overboarding mechanism
이때, 설치 공간 천장까지의 높이와 해수면으로부터의 높이는 각각 2.2 m, 1.8 m로 설정하였고, 예인체의 크기는 너비를 2.0 m, 높이 를 1.1 m로 설정하였다.
구체적인 구속 함수(constraint function)로 예인체가 해수면까 지 도달하기 위한 구속 함수는 식 (15)와 같다.
(15)
여기서,
max
예인체를 인양하였을 때, 선박 안으로 충분히 수납하기 위한 조건 의 구속 함수는 식 (16)과 같다.
(16)
여기서,
min
예인체를 투하하였을 때, 선박에서 확실하게 거리를 두어 간섭 방 지를 위한 조건의 구속 함수는 식 (17)과 같다.
(17)
여기서,
max
마지막으로 예인체를 투하하거나 인양할 때, 천장에 닿지 않게 하 기 위한 조건의 구속 함수는 식 (18)과 같다.
max (18)
5. 사변형 메커니즘 최적화 및 설계 결과
구속 함수를 바탕으로 MATLABⓇ의 GA(Genetic algorithm) 방식[4]을 이용하여 식 (14)에 주어진 14개의 설계변수를 최적화한 다. GA 방식을 이용하면 기존의 시작점에 의존하여 최적의 답을 찾는 방법[5]에 비해 전역해(global optimum) 값을 찾을 가능성이 높다[6]. GA의 여러 가지 방법 중 엘리트카운트(elitecount)를 이용 하는 방법으로 elitecount를 200으로, 개체군크기(population- size)를 5000으로 설정하고 최적화를 진행하였으며, elitecount 및 population-size의 수를 늘리면 시간이 오래 걸리나 좀 더 정확 한 결과 값을 볼 수 있었다. 다만 최적화 과정에서 선정되는 elitecount에 따라 제한 조건을 만족하지 않는 결과가 나오기도 하
였기 때문에, Fig. 12와 같이 SolidWorksⓇ를 이용하여 직접 2D 스케치를 수행한 뒤 (액추에이터 로드)의 길이 변화에 따라 메커
Fig. 12 Test of quadrilateral mechanism with SolidWorksⓇ
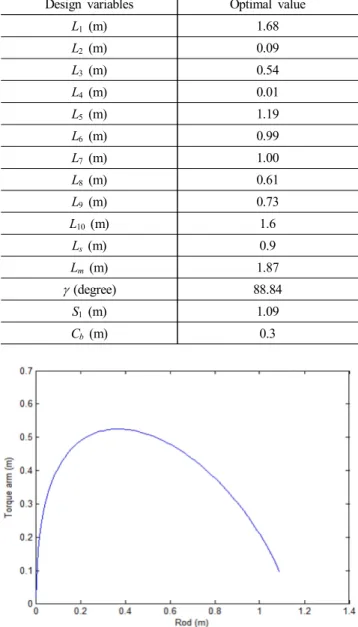
Design variables Optimal value
L1 (m) 1.68
L2 (m) 0.09
L3 (m) 0.54
L4 (m) 0.01
L5 (m) 1.19
L6 (m) 0.99
L7 (m) 1.00
L8 (m) 0.61
L9 (m) 0.73
L10 (m) 1.6
Ls (m) 0.9
Lm (m) 1.87
g (degree) 88.84
S1 (m) 1.09
Cb (m) 0.3
Table 2 Optimal design variables of quadrilateral mechanism
Fig. 13 Torque arm (r) according to actuator length (d)
니즘이 원활히 동작하는지 확인한 후에 결과 값을 선정하였다 (Fig. 12는 Table 2의 설계변수 값을 적용한 상태). Table 2는 GA 를 이용하여 얻은 최적화된 설계변수가 최종적으로 선정된 값을
정리하여 나타낸 것이다.
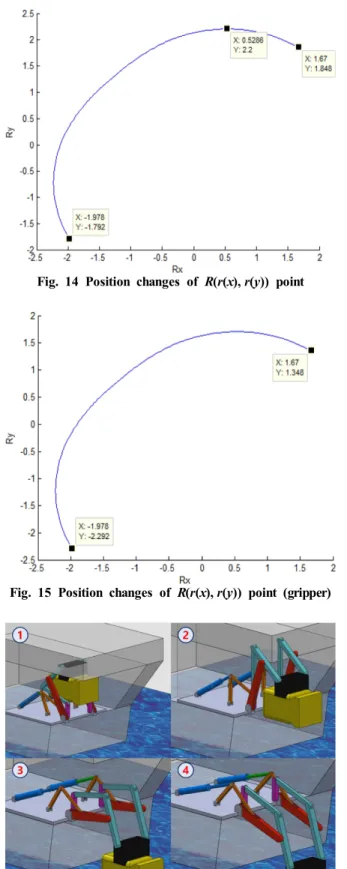
Table 2의 결과 값을 식 (3)과 식 (8)에 적용하여 그 결과를 Fig.
13~Fig. 15의 그래프로 나타내었다. Fig. 13은 로드암에 대한 토 크암을 나타내고 있으며, Fig. 14는 메인링크에서의 종점 (end-point)인 를 식 (8)에 적용하였을 때
의 위치 변화를 나타낸다. max일 때
)의 값은 (-1.98, -1.8)로 식 (15)와 식 (17)을 만족하고, 방향 최 고 정점이 의 값이 2.2 m로 식 (18)을 만족하며, min일 때
의 값이 1.67로 식 (16)을 만족한다. Fig. 15는 예인체 그리퍼 (gripper)의 길이를 0.5 m로 감안하였을 경우의 end-point의 위치 변화를 나타낸다.
Fig. 16은 SolidWorksⓇ를 이용하여 최적화된 치수로 3D 모델 링(modeling) 및 어셈블리(assembly)를 실시하여 설치 환경의 제 약 조건과 메커니즘의 작동 조건을 만족하는지 최종적으로 시뮬레 이션 하는 것을 나타낸다. 시뮬레이션을 통하여 설계된 사변형 메 커니즘이 모든 조건을 만족하는 것을 확인할 수 있었다.
5. 결 론
본 논문에서는 제한적인 환경에서 효율적인 메커니즘 개발을 위 해 기존 장비의 설치 환경 및 작업 범위 등의 장단점에 대하여 분석 하였고, 이를 바탕으로 기존 장비보다 효율적인 메커니즘을 설계 및 제안하였다. 설계된 메커니즘이 설치 환경(4 m(width)×6 m (depth)×2.2 m(height))에 간섭이 없으며 작업 범위를 만족시키는 좋은 토크-각도 특성을 갖도록 링크 길이 및 액추에이터 길이를 GA 방법을 이용하여 최적화를 진행하였다.
최적화를 적용하였을 때 해수면 높이(1.8 m) 및 천장과의 높이 (2.2 m) 제한을 만족하였으며 선박 안으로 충분히 들어올 수 있 음을 확인하였다. 제안한 메커니즘을 적용 시, 작업자의 안전과 작업 효율에서 큰 이점이 있을 것으로 기대되며, GA를 통한 문제 해결 방법은 제안한 메커니즘뿐만 아니라 실제 운용되는 장비에 대해서도 제한된 환경을 만족할 수 있도록 적용이 가능할 것으로 판단된다.
후 기
본 연구는 국방과학연구소의 지원을 받아 수행되었으며, 이에 감 사드립니다.
References
[1] Naval Open Source INTelligence, 2014, viewed 10 July 2016, ACTAS Fig. 14 Position changes of R(r(x), r(y)) point
Fig. 15 Position changes of R(r(x), r(y)) point (gripper)
Fig. 16 Quadrilatreral mechanism with SolidWorksⓇ simulation
Sonar System for the Indian Navy, <http://nosint.blogspot.kr/2014/
12/actas- sonar-systems-for-indian-navy.html>.
[2] Naval Analyses, n.d., viewed 8 August 2016, Bergamini Class (FREMM) Frigate of the Italian Navy, <http://navalanalyses.
blogspot.kr/2014/08/bergamini-class-fremm-frigates-of.html>.
[3] ODIM Spectrum, n.d., viewed 22 August 2016, ODIM Specturem Ltd.
achieves ISO 9001-200 registration, <http://www.odimspectrum.
com/news.html>.
[4] MathWorks, n.d., viewed 10 September 2016, Global Optimization
Toolbox, <http://kr.mathworks.com/help/gads/performing-a-genetic- algorithm-optimization.html>.
[5] MathWorks, n.d., viewed 10 September 2016, Global Optimization Toolbox,<http://kr.mathworks.com/ help/optim/ug/fmincon.html>.
[6] Kim, H. G., Park, S. D., 2014, Design of a Novel Knee Joint for an Exoskeleton with Good Energy Efficiency for Load-Carrying Augmentation, Journal of Mechanical Science and Technology, 28:11 4361-4367.