Journal of Institute of Control, Robotics and Systems (2013) 19(5):481-487
http://dx.doi.org/10.5302/J.ICROS.2013.12.1842 ISSN:1976-5622 eISSN:2233-4335
모델링 불확실성을 갖는 이산구조 비선형 시스템을 위한 유한 임펄스 응답 고정구간 스무딩 필터 및 DR/GPS
결합항법 시스템에 적용
FIR Fixed-Interval Smoothing Filter for Discrete Nonlinear System with Modeling Uncertainty and Its Application to DR/GPS Integrated
Navigation System
조 성 윤
*
, 김 경 호(Seong Yun Cho 1 and Kyong-Ho Kim 1 )
1
IT Convergence Technology Research Laboratory, Electronics and Telecommunications Research Institute
Abstract: This paper presents an FIR (Finite Impulse Response) fixed-interval smoothing filter for fast and exact estimating state variables of a discrete nonlinear system with modeling uncertainty. Conventional IIR (Infinite Impulse Response) filter and smoothing filter can estimate state variables of a system with an exact model when the system is observable. When there is an uncertainty in the system model, however, conventional IIR filter and smoothing filter may cause large errors because the filters cannot estimate the state variables corresponding to the uncertain model exactly. To solve this problem, FIR filters that have fast estimation properties and have robustness to the modeling uncertainty have been developed. However, there is time-delay estimation phenomenon in the FIR filter. The FIR smoothing filter proposed in this paper makes up for the drawbacks of the IIR filter, IIR smoothing filter, and FIR filter. Therefore, the FIR smoothing filter has good estimation performance irrespective of modeling uncertainty. The proposed FIR smoothing filter is applied to the integrated navigation system composed of a magnetic compass based DR (Dead Reckoning) and a GPS (Global Positioning System) receiver. Even when the magnetic compass error that changes largely as the surrounding magnetic field is modeled as a random constant, it is shown that the FIR smoothing filter can estimate the varying magnetic compass error fast and exactly with simulation results.
Keywords: IIR filter, FIR filter, IIR smoothing filter, FIR smoothing filter, DR/GPS, magnetic compass error estimation
I. 서론
현재까지 획득한 측정치를 사용하여 현재의 상태변수를 추정하는 필터(filter) 및 미래의 상태변수를 추정하는 추정기 (predictor)와 비교하여 스무딩(smoothing) 필터는 현재까지 획 득한 측정치를 사용하여 과거의 상태변수를 추정하는 것으 로 구분되며 추정하는 시점을 기준으로 필터보다 더 많은 측 정치를 사용함으로써 더 정확한 상태변수를 추정할 수 있다[1].
스무딩 필터는 상태변수 추정 시점과 측정치 이용 방법에 따 라 고정구간(fixed-interval), 고정시점(fixed-point), 고정지연(fixed- lag) 스무딩 필터로 분류되며[1] 이 세가지 스무딩 필터는 모두 IIR (Infinite Impulse Response, 무한 임펄스 응답) 형태를 갖는다.
무한 임펄스 응답 필터는 모델링 불확실성이 없고, 입력 오차 가 백색잡음으로만 이루어져 있으며, 가관측성(observability)이 좋은 경우 시간에 따라 오차가 영 근처로 수렴하는 장점을 갖는다. 그러나 이 조건을 만족하지 않는 경우 최적의 추정 치를 획득하기 어렵다. 특히 모델링 불확실성이 존재하는 경
우 필터의 오차가 수렴하지 않는 불안정한 상태가 된다. 이 런 문제를 해결하기 위해 FIR (Finite Impulse Response, 유한 임펄스 응답) 형태의 필터 연구가 이루어졌다[2-11].
유한 임펄스 응답 필터는 일정한 구간(horizon) 또는 확장 구간 동안의 측정치만을 사용하여 상태변수를 추정하는 형 태로 구성되며 RHKF (Receding Horizon Kalman FIR) 필터 [3,4,8], Moving Horizon 필터[9,10] 등으로 불리어진다. 유한 임 펄스 응답 필터는 모델링 불확실성 및 일시적인 외란 (disturbance) 등에 강인한 특성을 갖는 반면 수렴 특성이 나 쁘며 계산량이 무한 임펄스 응답 필터에 비해 크다는 단점을 갖는다[3,4]. 이런 단점을 보완하기 위한 MRHKF (Modified RHKF) 필터가 개발되었다[4]. 또한 유한 임펄스 응답 스무딩 필터도 연구되었다[12-14]. 그러나 지금까지 발표된 연구결과 는 대부분 선형시스템에 적용 가능한 유한 임펄스 응답 스무 딩 필터이다.
비선형 시스템에 적용할 수 있는 스무딩 필터[15] 및 유한 임펄스 응답 필터는 각각 독립적으로 연구되었다. 본 논문에 서는 비선형 시스템에 적용할 수 있는 유한 임펄스 응답 스 무딩 필터를 제시한다. 이 스무딩 필터는 오프라인(off-line) 뿐 아니라 지연허용(delay tolerant) 시스템에도 사용할 수 있 으며 유한 임펄스 응답 필터의 단점을 보안한 MRHKF 필터 [4]를 기반으로 스무딩 필터를 설계하였다. 스무딩 필터의 형 태는 고정구간 스무딩 필터이다. 현 단계에서 설정된 구간 Copyright© ICROS 2013
* 책임저자(Corresponding Author)
Manuscript received November 14, 2012 / revised March 4, 2013 / accepted March 27, 2013
조성윤, 김경호: 한국전자통신연구원 융합기술연구부문 ([email protected]/[email protected])
※ 본 연구는 지식경제부 산업융합기술개발사업의 일환으로 수행하
였음[운전 안전성 및 편의성 향상을 위한 운전자 시야 중심 차량
용 증강현실 정보제공 시스템 기술 개발].
조 성 윤, 김 경 호 482
안에서 정방향필터(forward filter)를 구동하고 구간 끝에서 역 방향필터(backward filter)를 시작하여 구간 내에서 구동하며 두 필터의 결과를 역방향으로 융합(fusion)함으로써 스무딩 결과를 획득하게 된다. 제안된 유한 임펄스 응답 스무딩 필 터의 성능 검증을 위해 모델링 오차를 갖는 간략화된 DR/GPS 시스템[4]에 적용하였으며 그 성능을 시뮬레이션 기 반으로 검증하였다. 이 유한 임펄스 응답 스무딩 필터는 오 프라인 구동 또는 지연허용 시스템에서 사용할 수 있으며 저 가형 센서로 구성된 시스템에서 센서 오차를 정확하게 모델 링 하기 어려운 경우에 유용하게 사용될 수 있다.
본 논문의 구성은 II 장에서 이산구조 비선형 시스템을 위 한 유한 임펄스 응답 고정구간 스무딩 필터를 기술하고 III 장에서 이 유한 임펄스 응답 스무딩 필터를 DR/GPS 시스템 에 적용한 다음 그 결과를 시뮬레이션을 통해 보인다. 마지 막으로 IV 장에서 결론을 맺는다.
II. 비선형 유한 임펄스 응답 고정구간 스무딩 필터 비선형 시스템을 위한 유한 임펄스 응답 고정구간 스무딩 필터는 유한 임펄스 응답 필터의 구조에서 고정구간 스무딩 필터와 같이 고정구간 내에서 역방향필터를 구동하며 정방 향필터와의 융합을 통해 상태변수를 추정한다. 기본 구조는 그림 1과 같다. 유한 임펄스 응답 필터의 구조는 MRHKF 필 터를 기본으로 한다. 유한 임펄스 응답을 위한 정상적인 측 정치 구간을 N 으로 한다. 이를 기반으로 후퇴구간(receding interval)의 크기도 N 으로 설정한다. 그리고 비활성구간 (hidden section)과 활성구간(active section)의 크기 또한 N 으로 설정한다. 비활성구간은 상태변수 추정을 하지 않고 정보행 렬(information matrix) 형태로 필터를 구동한다. 먼저 이산구조 비선형 시스템을 다음과 같이 정의한다.
1
( )
( )
k k k
k k k
x f x Gw
y h x v
+
= +
= + (1)
여기서 k 는 이산시간을 의미하며, x Î Â 는 상태변수, 그
L리고 y Î Â 는 출력을 의미한다.
qw Î Â 와
k pv Î Â 는 각
k q각 공정잡음과 측정잡이며 각각 오차 공분산을 Q 와 R 을 갖는다. 그리고 함수 f 와 h 는 연속 미분가능한 함수이다.
정보행렬은 다음과 같이 상태변수 오차 공분산( P )의 역행 렬로 정의된다.
그림 1. 유한 임펄스 응답 고정구간 스무딩 필터 개념도.
Fig. 1. Concept of FIR fixed-interval smoothing filter.
1 k
P
k-W = (2)
정보행렬의 측정치갱신과 시간전파 식 그리고 칼만 이득 식은 다음과 같다[4].
1 T k k-
H R H
k k- kW = W + (3)
1 1
(
T)
k
I
kG
k-
- -
W = - G Y (4)
1 T 1
k k k
K = W
-H R
-(5)
여기서
1 T k
F
k- kF
k-Y = W (6)
1 1
(
T)
k k
G Q
-G
kG
-G = Y + Y (7)
k k
x x
F f
x
=*= ¶
¶ (8)
k k
x x
H h
x
=*= ¶
¶ (9)
여기서 x
k*는 비선형함수의 선형화를 위한 공칭점(nominal point)으로 다음과 같이 정의된다.
k k k
x
*= x -
dx (10) 비활성구간에서는 상태변수는 추정하지 않으므로 공칭점 은 초기값에서 다음과 같이 시간전파 한다.
(
1)
k k
x
*= f x
*-(11) (10)에서 공칭점 오차는 필터에서 추정되어 보상된다. 측정 치갱신 식은 다음과 같다.
( )
( )
( ) ( )
{ }
( )
{ }
1 1
1 1 1
1 1
ˆ ˆ ( ) ˆ
ˆ ( ) ˆ
ˆ ( )
ˆ ( )
k k k k k k k
T
k k k k k k k
T T
k k k k k k k k
T
k k k k k k
x x K z h x H x
x H R z h x H x
H R H x H R z h x
x H R z h x
d d d
d d
d d
- * -
- - - * -
- - - - *
- - - - *
= + - -
= + W - -
= W W - + -
= W W + -
(12)
여기서 z 는 측정치이다.
k초기 정보행렬은 0
L L´으로 설정한다. 일반적으로 필터가 가관측한 경우 비활성구간의 크기가 시스템 차수인 L 보다 큰 경우 정보행렬의 역행렬을 구할 수 있게 된다. 즉 비활성 구간 중간에는 정보행렬의 역행렬 계산이 안되므로 (12)를 통해 공칭점 오차의 측정치갱신을 할 수 없다. 이 문제를 해 결하기 위해 새로운 상태변수를 다음과 같이 설정한다.
k k
x
kx
= W
d(13)
(13)을 (12)에 대입하여 정리하면 다음과 같다.
( )
( )
1
1
ˆ ˆ ( )
ˆ ( )
T
k k k k k k
T
k k k k
x H R z h x
H R z h x
x d
x
- - - *
- - *
= W + -
= + -
(14)
(4), (6)을 (14)에 대입하여 새로운 상태변수의 시간전파 식을 다음과 같이 정리할 수 있다.
Seong Yun Cho and Kyong-Ho Kim
모델링 불확실성을 갖는 이산구조 비선형 시스템을 위한 유한 임펄스 응답 고정구간 스무딩 필터 및 DR/GPS 결합항법 시스템에 적용 483
1 1 1 1
1
1 1 1 1 1 1
1 1 1 1
1 1 1
ˆ ˆ
ˆ
( )
( ) ˆ
( ) ˆ
( ) ˆ
k k k
T
k k k k
T T
k k k k k k
T T
k k k k
T T
k k k
x
I G F x
I G F F F x
I G F x
I G F
x d
d d d x
- - -
- - - -
- -
- - - -
-
- - - -
-
- - -
= W
= - G Y
= - G W
= - G W
= - G
(15)
비활성구간의 끝에서 정보행렬의 역행렬을 계산할 수 있 으므로 다음과 같이 공칭점의 오차를 추정할 수 있다.
1
ˆ ˆ
N N Nd
x = W
-x(16)
(14)와 (15)를 통해 새로운 상태변수의 측정치갱신과 시간전 파를 수행하며 (3)과 (4)를 통해 정보행렬의 측정치갱신과 시 간전파를 비활성구간 동안 수행한다. 첫 번째 영역의 비활성 구간 끝에서 (10)과 (16) 그리고 (2)를 통해 다음과 같이 활성 영역의 초기 상태변수와 오차 공분산 행렬을 결정한다.
ˆ
kx = x
N*+
dx ˆ
N(17)
1
N N
P = W
-(18)
활성구간의 정방향필터는 EKF(Extended Kalman Filter)로 구 동되며 이를 위한 초기 공칭점을 (17)로 설정한다. 그리고 이 구간에서는 상태변수를 추정( ˆ , x
FNx ˆ
NF+1, L , x ˆ
2FN)하여 제공할 수 있다.
ˆ
kF kF k(
k k kF)
x = x
*+ K z - H x
*(19)
( )
F F
k k k k
P = I - K H P
-(20)
여기서
( )
1F T F T
k k k k k k
K = P
-H H P
-H + R
-(21)
1 1 1
F F T
k k k k
P
-= F P F
- - -+ Q (22) (
1)
F F
k k
x
*= f x
-*(23) 스무딩 필터에서 융합을 위해서 이 구간 동안 오차 공분산 행렬( P
NF, P
NF+1, L , P
2FN)을 저장하여 둔다. 활성구간의 끝에 서 추정한 상태변수와 오차 공분산 행렬을 사용하여 역방향 필터의 초기값을 다음과 같이 설정한다.
ˆ
2BNx = x ˆ
2FN(24)
2 B
P
N= P
2FN(25) 여기서 상위첨자 F 와 B 는 각각 정방향필터와 역방향필터 를 의미한다.
역방향필터는 일반적인 칼만필터를 사용할 수도 있으며, 역공분산 행렬인 정보 행렬의 형태를 사용하기도 한다. 비선 형 시스템에서는 정방향필터는 EKF를 사용하고 역방향필터 는 LKF (Linearized Kalman Filter)를 사용하여 구성하기도 한다.
본 논문에서는 역방향필터 또한 EKF를 사용하여 구동하며 역방향 시간으로 상태변수( x ˆ
2BN-1, x ˆ
2BN-2, L ˆ , x )와 오차 공
NB분산 행렬( P
2BN-1, P
2BN-2, L , P )을 추정한다.
NB구간 내 시간 t 에서 정방향필터와 역방향필터의 융합은
k다음과 같이 이루어진다.
ˆ
kSx = P
kS{ ( P
kF)
-1x ˆ
Fk+ ( P
kB)
-1x ˆ
kB} (26) 여기서 상위첨자 S 는 융합을 통한 스무딩을 의미하며,
{ ( )
1( )
1}
1S F B
k k k
P = P
-+ P
- -(27)
활성구간과 새로운 유한 임펄스 응답 영역의 비활성구간 을 동시에 독립적으로 구동한다. 비활성구간의 끝에서 활성 구간의 초기치를 (17), (18)을 사용하여 설정하는 동시에 새로 운 유한 임펄스 응답 영역의 비활성구간의 초기치를 다음과 같이 설정한다.
F
ˆ
FN N
x
*= x (28)
F
0
N L L
P =
´(29)
유한 임펄스 응답 필터의 특성을 위해서는 새로운 유한 임 펄스 응답 영역의 초기값은 이전 유한 임펄스 응답 영역과는 독립적으로 설정해야 한다. 그러나 비선형 시스템을 위한 필 터에서는 초기 공칭점의 큰 오차는 필터의 불안정성을 유발 하여 필터의 수렴을 불가능하게 할 수 있으므로 (28)에서 초 기 비활성구간의 공칭점을 이전 유한 임펄스 응답 영역의 마 지막 활성구간의 추정된 상태변수로 설정함으로써 이 문제 를 해결한다. 그러나 유한 임펄스 응답 필터의 특성을 부여 하기 위해 (29)와 같이 새로운 유한 임펄스 응답 영역의 초 기 공분산 행렬을 영 행렬로 초기화 하는 것이 중요하다.
III. DR/GPS 결합항법시스템 및 유한 임펄스 응답 스무딩 필터 적용
1. DR/GPS 결합항법 시스템
본 논문에서 제안된 유한 임펄스 응답 스무딩 필터의 성능 을 검증하기 위하여 모델링 불확실성을 갖는 간략화된 DR/GPS 결합항법 시스템에 적용해 보았다. DR 시스템은 그 림 2에서 나타낸 것과 같이 지자기 센서 모듈을 사용하는 것 으로 한다. 여기서 적용하는 DR/GPS 결합항법 시스템은 본 논문에서 제안된 필터의 성능 검증을 목적으로 이용된 것으 로 간략화된 것을 사용한다. 즉, 롤각과 피치각의 변화는 없 다고 가정한다. 또한 필터의 모델 불확실성에 대한 성능 분 석을 위해 지자기 센서의 오차를 랜덤 상수(random constant) 로 설계하고 시뮬레이션 시 다양한 오차요인을 넣어 이에 대 한 필터의 추정 성능을 분석한다.
먼저 지자기 센서 모듈에 내장되어 있는 가속도계를 사용 하여 다음과 같이 차량의 전진방향 속도를 계산한다.
그림 2. 지자기 센서 모듈 기반 DR 시스템.
Fig. 2. Magnetic compass module based DR system.
FIR Fixed-Interval Smoothing Filter for Discrete Nonlinear System with Modeling Uncertainty and Its Application to DR/GPS Integrated...
조 성 윤, 김 경 호 484
, , 1 ,
b b b
x k x k x k
V = V
-+ A D k (30) 여기서 A 는 차량의 전진방향으로 정렬된 가속도계 출력을
bx나타낸 것이다.
계산된 차량의 전진방향 속도와 지자기 센서의 방위각 출 력 정보를 사용하여 다음과 같이 속도와 위치를 계산한다.
,
cos sin
n b k
k x k
k
V V
yy
é ù
= ê ú
ë û
(31)
1
n n n
k k k
P = P
-+ V D k (32) 여기서 상위첨자 n 과 b 는 각각 항법좌표계(navigation frame) 와 동체좌표계(body frame)를 의미하며 k D 는 시간전파 주기 를 의미한다.
가속도계와 지자기 센서의 오차는 백색잡음 외에 다음과 같이 추정해야 할 랜덤상수로 정의한다.
, , 1
,
, 0~ (0, )
b b b
x k x k x accel
A A A N P
d
=
d - d(33)
1
,
0~ (0, )
k k
N P
mcdy
=
dy - dy(34)
이 센서 오차로 인해 전진방향 속도와 항법좌표계 상의 위 치는 다음과 같은 계산 오차를 산출하게 된다.
, , 1 ,
b b b
x k x k x k
V V A k
d
=
d -+
dD (35)
1 ,
cos sin
sin cos
k k
n n b
k k x k k
k k
P P
yk V
yk
d d d dy
y y
-
é ù é - ù
@ + ê ú D × + ê ú D ×
ë û ë û
(36)
이 식들을 기반으로 스무딩 필터를 설계할 수 있다. 측정 치는 GPS 수신기로부터 획득되는 위치와 속도정보를 사용하 는 경우 시스템 및 측정치 식은 다음과 같다.
1
, ~ (0, )
, ~ (0, )
k k k k k
k k k k
x F x w w N Q
y Hx v v N R
+
= +
= + (37)
여기서
n n b b T
N E x x
x = ë é P P V
dA
dyù û (38)
1 0 cos 0 sin
0 1 sin 0 cos
0 0 1 0
0 0 0 1 0
0 0 0 0 1
k k
k k
k
k k
k k
F k
y y
y y
× D - × D
é ù
ê × D × D ú
ê ú
ê ú
= D
ê ú
ê ú
ê ú
ë û
(39)
[
3 30
3 2]
H
k= I
´ ´(40)
시스템 차수가 L = 5 이므로 유한 임펄스 응답을 위한 정 상적인 측정치 구간을 N = 5 로 설정한다.
2. 시뮬레이션 기반 성능 분석
본 논문에서 제시한 비선형 유한 임펄스 응답 고정구간 스 무딩 필터의 성능을 검증하기 위하여 DR/GPS 복합항법 시 스템에 적용한 시뮬레이션을 수행하였다. DR은 그림 2와 같 이 구성하며 시간전파는 10Hz로 하며 GPS 측정치를 활용한 측정치갱신은 1Hz로 하는 것으로 가정하였다. 가속도계 오차 는 (33)을 고려하여 다음과 같이 설정하였다.
2 2 2 2
(1 / ) , (0.1 / )
accel accel
P = m s Q = m s (41)
지자기 센서의 오차는 주위 환경의 자기장 영향을 받아 변 한다[4,16]. 다음과 같이 점프(jump)오차와 램프(ramp)오차, 그 리고 랜덤워크(random walk) 오차가 있는 것으로 가정하였다.
2
1
, (0.3 )
k k
a
kb
kQ
mcdy
=
dy -+ + =
o(42)
여기서
(
2)
~ 0, (0.1 )
a
kN
o(43)
10 , 6
10 , 20
10 , 40
10 , 60
0.2 , 80 85
0.2 , 95 100
0 ,
k
k k k
b k
k k
k k
otherwise
ì =
ï - =
ï
ï - =
ï ï
= í =
ï D £ £
ï
ï- D £ £
ï ï î
o
o
o
o
o
o
(44)
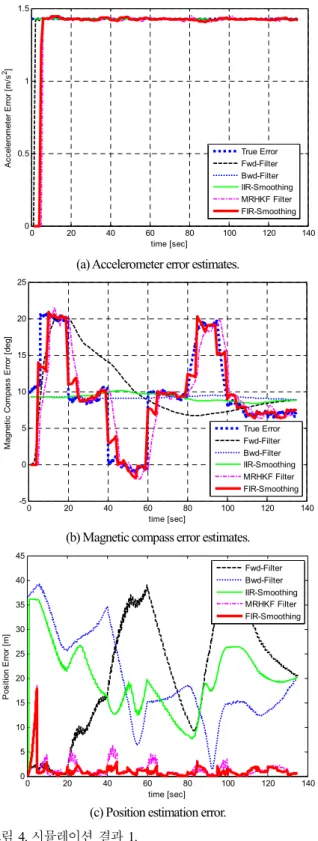
운항 궤적과 지자기 센서 오차는 그림 3과 같다. 지자기 센서 오차는 (43)에서 나타낸 것과 같이 랜덤워크 오차에 의 해 생성되는 일 예이다. 그러나 지자기 센서의 오차를 (35)와 같이 랜덤상수로 모델링 하였다. 즉 센서 오차 모델링에 불 확실성이 존재하는 경우이다. 이 경우 무한 임펄스 응답 필 터와 무한 임펄스 응답 스무딩 필터, 그리고 유한 임펄스 응 답 스무딩 필터의 성능을 비교/분석하였다.
-300 -200 -100 0 100 200 300 400 500 600
-600 -500 -400 -300 -200 -100 0 100 200 300
East [m]
North [m]
Start
(a) Trajectory.
0 20 40 60 80 100 120 140
0 5 10 15 20 25 30
time [sec]
Magnetic Compass Bias [deg]
(b) Magnetic compass error.
그림 3. 운항궤적 및 지자기 센서 오차.
Fig. 3. Trajectory and magnetic compass error.
모델링 불확실성을 갖는 이산구조 비선형 시스템을 위한 유한 임펄스 응답 고정구간 스무딩 필터 및 DR/GPS 결합항법 시스템에 적용 485
0 20 40 60 80 100 120 140
0 0.5 1 1.5
time [sec]
Accelerometer Error [m/s2]
True Error Fwd-Filter Bwd-Filter IIR-Smoothing MRHKF Filter FIR-Smoothing
(a) Accelerometer error estimates.
0 20 40 60 80 100 120 140
-5 0 5 10 15 20 25
time [sec]
Magnetic Compass Error [deg]
True Error Fwd-Filter Bwd-Filter IIR-Smoothing MRHKF Filter FIR-Smoothing
(b) Magnetic compass error estimates.
0 20 40 60 80 100 120 140
0 5 10 15 20 25 30 35 40 45
time [sec]
Position Error [m]
Fwd-Filter Bwd-Filter IIR-Smoothing MRHKF Filter FIR-Smoothing
(c) Position estimation error.
그림 4. 시뮬레이션 결과 1.
Fig. 4. Simulation result 1.
표 1. 시뮬레이션 1 - 추정오차 (평균).
Table 1. Simulation 1 - estimation error (mean).
IIR 필터
역방향 필터
IIR 스무딩
FIR 필터
FIR 스무딩 ˆ [ / ]
bx 2A m s
d
0.00118 0.00111 0.00097 0.00685 0.00583 ˆ [ ]
dy
o 5.62809 3.56273 3.66293 1.86895 0.88415 ˆ [ ]
nP m
d
24.40773 17.52426 18.44067 1.24842 0.85749
시뮬레이션 결과를 그림 4와 5에 나타내었다. 먼저 그림 4 는 (44)와 같이 지자기 센서 오차가 주위 자기장의 영향을 받아 변하는 경우의 시뮬레이션 결과이다. 그림에서 파선 (dashed line)은 무한 임펄스 응답 필터로 EKF의 결과이며 이 결과는 무한 임펄스 응답 스무딩 필터에서 정방향필터로 사 용된다. 점선(dotted line)과 실선은 무한 임펄스 응답 스무딩 필터에서 역방향필터의 결과와 융합된 결과를 각각 나타낸 다. 일점쇄선(dash-dotted line)은 유한 임펄스 응답 필터인 MRHKF 필터의 결과이며 굵은 실선은 유한 임펄스 응답 스 무딩 필터의 결과이다. 가속도계 오차는 랜덤상수로 필터와 스무딩 필터, 그리고 무한 임펄스 응답과 유한 임펄스 응답 구분없이 잘 추정하는 것을 볼 수 있다. 수렴 특성은 유한 임펄스 응답 보다 무한 임펄스 응답이 좋으며 또한 필터보다 스무딩 필터가 좋은 것을 표 1에서 확인할 수 있다. 그림 4(b)와 같이 변하는 지자기 센서 오차를 무한 임펄스 응답 필터는 잘 추정하지 못하는 것을 볼 수 있다. 이것은 모델링 불확실성이 있는 경우 무한 임펄스 응답 필터에서 나타나는 일반적인 특성이다. 역방향 필터 또한 가관측성의 특성에 의 해 오차 공분산이 작아진 상태에서 변하는 센서 오차를 추정 하기에는 역부족인 것을 볼 수 있다. 이 두 필터의 융합을 한 무한 임펄스 응답 스무딩 필터의 결과 변하는 오차를 잘 추정하지 못하는 것을 볼 수 있다. 따라서 기존의 무한 임펄 스 응답 형태의 필터 및 스무딩 필터는 모델링 불확실성이 있는 경우 해당 불확실성 파라미터를 잘 추정하지 못하는 것 을 확인할 수 있다. 이에 반해 유한 임펄스 응답 필터는 변 하는 오차를 잘 추정하는 것을 볼 수 있다. 그러나 추정치의 시간지연(time delay) 현상이 존재하는 것을 알 수 있다. 이 시 간지연 특성의 일부를 유한 임펄스 응답 스무딩 필터가 보상 하는 것을 확인할 수 있다. 이 영향으로 인해 그림 (c)에서 나타낸 것과 같이 위치오차를 유발한다. 즉 지자기 센서 모 듈 기반의 DR과 GPS를 결합한 항법에서 GPS 정보를 잘 수 신할 수 있는 구간에서도 기존의 무한 임펄스 응답 필터 및 무한 임펄스 응답 스무딩 필터를 사용하는 경우 큰 위치오차 를 발생시키게 된다. 이에 반해 유한 임펄스 응답 필터와 유 한 임펄스 응답 스무딩 필터는 좋은 위치추정 결과를 확보할 수 있으며 본 논문에서 제시한 유한 임펄스 응답 스무딩 필 터는 유한 임펄스 응답 필터의 오차를 감소시키는 것을 확인 할 수 있다.
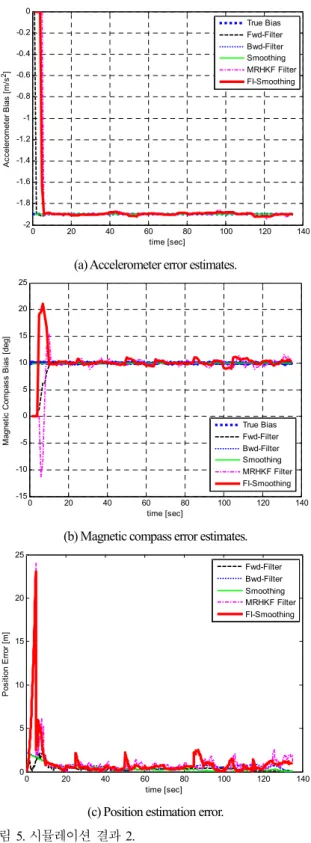
그림 5는 주위 자기장의 변화가 없는 환경에서 지자기 센 서 오차가 고정된 경우의 시뮬레이션 결과이다. 지자기 센서 오차와 가속도계 오차가 모두 랜덤상수인 경우 무한 임펄스 응답 필터와 유한 임펄스 응답 필터 그리고 스무딩 필터의 랜덤상수 오차 추정이 잘 이루어지는 것을 볼 수 있다. 또한 위치도 잘 추정하는 것을 알 수 있다. 그러나 랜덤상수 오차 의 경우 유한 임펄스 응답 필터보다는 무한 임펄스 응답 필 터의 성능이 다소 우수한 것을 볼 수 있으며 이것은 무한 임 펄스 응답 필터의 수렴 특성이 유한 임펄스 응답 필터보다 좋기 때문이다. 유한 임펄스 응답 스무딩 필터의 추정오차는 유한 임펄스 응답 필터보다 근소하게 작은 것을 볼 수 있다.
이런 경우 무한 임펄스 응답 필터/스무딩 필터의 추정 성능
이 유한 임펄스 응답 필터/스무딩 필터보다 좋으나 저가형
조 성 윤, 김 경 호 486
0 20 40 60 80 100 120 140
-2 -1.8 -1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0
time [sec]
Accelerometer Bias [m/s2]
True Bias Fwd-Filter Bwd-Filter Smoothing MRHKF Filter FI-Smoothing
(a) Accelerometer error estimates.
0 20 40 60 80 100 120 140
-15 -10 -5 0 5 10 15 20 25
time [sec]
Magnetic Compass Bias [deg]
True Bias Fwd-Filter Bwd-Filter Smoothing MRHKF Filter FI-Smoothing
(b) Magnetic compass error estimates.
0 20 40 60 80 100 120 140
0 5 10 15 20 25
time [sec]
Position Error [m]
Fwd-Filter Bwd-Filter Smoothing MRHKF Filter FI-Smoothing
(c) Position estimation error.
그림 5. 시뮬레이션 결과 2.
Fig. 5. Simulation result 2.
표 2. 시뮬레이션 2 - 추정오차 (평균).
Table 2. Simulation 2 - estimation error (mean).
IIR 필터
역방향 필터
IIR 스무딩
FIR 필터
FIR 스무딩 ˆ [ / ]
xb 2A m s
d
0.00134 0.00113 0.00102 0.01025 0.00873 ˆ [ ]
dy
o 0.07787 0.08565 0.07583 0.39849 0.36794 ˆ [ ]
nP m
d