CopyrightⒸ2015 KSAE / 137-10 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2015.23.4.436 Transactions of KSAE, Vol. 23, No. 4, pp.436-443 (2015)
PHEV 시스템의 분석을 통한 신 PHEV 동력 시스템 제안
김 진 성․박 영 일
*서울과학기술대학교 기계시스템디자인공학과
Proposal of a Novel Plug-in-hybrid Power System Based on Analysis of PHEV System
Jinseong Kim․Yeongil Park
*Department of Mechanical System Design Engineering, Seoul National University of Science and Technology, Seoul 139-743, Korea
(Received 9 March 2015 / Revised 25 May 2015 / Accepted 25 May 2015)
Abstract : In order to develop the PHEV(plug-in hybrid electric vehicle), the specific power transmission systems considering the PHEV system characteristics should be applied. A PHEV applied to series-parallel type hybrid power transmission system is a typical example. In this paper, the novel hybrid power systems are proposed by analyzing the existing PHEV system. The backward simulation program is developed to analyze the fuel efficiency of hybrid power system. Quasi-static models for each components such as engine, motor, battery and vehicle are included in the developed simulation program. To obtain an optimal condition for hybrid systems, an optimization approach called the dynamic programming is applied. The simulation is performed in various driving cycles. A weakness for the existing system is found through the simulation. To compensate for a discovered weakness, novel hybrid power systems are proposed by adding or moving the clutch to the existing system. Comparing the simulation results for each systems, the improved fuel efficiency for proposed systems are verified.
Key words : Plug-in hybrid electric vehicle(PHEV, 플러그인 하이브리드 전기 차량), PHEV power transmission system(PHEV 동력전달계), Backward simulation(후방향 시뮬레이션), Clutch(클러치), Fuel efficiency(연비효율)
1. 서 론
1)최근 자동차 산업은 환경오염과 지구 온난화로 인한 배출 가스에 대한 규제와 자원 고갈 문제로 인 한 유가 상승은 소비자들의 친환경 고효율 차량에 대한 관심을 불러일으키고 있으며, 이에 따라 세계 적인 자동차 업체들은 친환경 하이브리드 차량의 개발에 박차를 가하고 있다.
하이브리드 자동차의 연구 분야는 일반적으로 새 로운 동력전달계 구조 적용, 동력원의 최적 용량 매 칭, 최적화된 주행제어 전략 개발 그리고 각 단품에
*Corresponding author, E-mail: [email protected]
대한 성능 최적화로 구분할 수 있다.
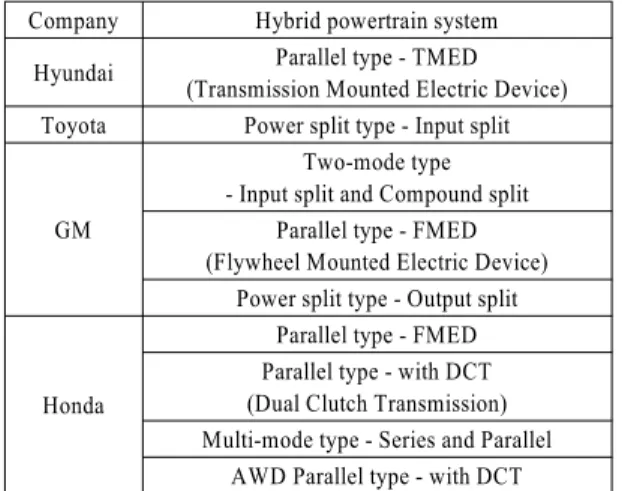
1)특히 하이브리드 차량은 시스템 특성에 맞는 동 력전달계 구조 선정이 선행되어야 한다. 주요 자동 차 업체들은 다양한 형태의 하이브리드 동력전달계 를 개발 적용하고 있고 Table 1은 적용되고 있는 하 이브리드 동력전달계이다.
특히 최근 주요 차량 제작사들이 자동차 전시회 에서 가정이나 건물의 전기를 이용하여 외부에서 배터리를 충전할 수 있는 PHEV (Plug-in Hybrid Electric Vehicle)시스템을 개발하여 소개하고 있다.
PHEV는 고성능 배터리를 사용하여 배터리만으로
일정거리를 주행하고 배터리의 SOC가 일정이하에
PHEV 시스템의 분석을 통한 신 PHEV 동력 시스템 제안
Table 1 Hybrid powertrain systems
Company Hybrid powertrain system Hyundai Parallel type - TMED
(Transmission Mounted Electric Device) Toyota Power split type - Input split
GM
Two-mode type - Input split and Compound split
Parallel type - FMED (Flywheel Mounted Electric Device)
Power split type - Output split
Honda
Parallel type - FMED Parallel type - with DCT (Dual Clutch Transmission) Multi-mode type - Series and Parallel
AWD Parallel type - with DCT
서는 엔진을 이용한 하이브리드 주행이 가능한 시 스템이다.
전기 주행 비중이 큰 PHEV 시스템은 특히 순수 전기 주행시 시스템의 효율의 극대화가 필요하다.
PHEV 시스템의 개발은 기존 HEV 시스템에 고성능 배터리와 외부 충전기능을 추가하고 동력전달계를 보완하여 구성하거나 PHEV 시스템에 적합한 별도 의 동력전달계를 구성하는 것이다.
본 논문에서는 기존의 PHEV 시스템에 대한 연비 해석을 수행하고 시스템이 가지는 문제점을 보완하 여 새로운 구조의 PHEV 시스템을 제안하고자 한다.
2. 연비 해석을 위한 시뮬레이터 개발 하이브리드 시스템의 성능 평가에 적합한 방법은 시스템 모델링을 통해 적용 차량의 연비 해석을 수 행하고 각 구성 요소의 거동을 분석하는 것이다. 동 력전달계 설계 시에는 시스템의 전영역 최적 결과 를 얻을 수 있는 동적계획법(Dynamic Programming) 기반의 후방향 시뮬레이션으로 연비평가를 수행하 여 분석하는 방법이 이용되고 있다.
2)2.1 적용 차량 제원
PHEV 시스템을 적용하기 위한 차량은 소형 차량 으로서 적용된 차량의 제원은 Table 2와 같다.
2.2 후방향 시뮬레이션
후방향 시뮬레이션은 모델의 출력 거동을 알고
Table 2 Vehicle specification
Engine 1396 [cc] / 67 [kW]
Motor & Generator 50 [kW]
Gear ratio 1 2.045
Gear ratio 2 0.893
Final drive ratio 3.83
Tire radius 0.278 [m]
Rolling resistance coefficient 0.01
Drag coefficient 0.33
Frontal area 2.5 [m2]
있을 때 최적의 입력을 알아내기 위한 방법이다.
하이브리드 차량의 후방향 시뮬레이션은 하나의 출력인 요구 동력을 만족하고 정해진 사이클 동안 연료 소모량을 최소화하기 위한 엔진과 모터 등 두 가지 이상의 입력 조합을 찾는다. Bellman의 최적성 의 원리에 기반한 동적 계획법을 이용하면 이러한 최적화 문제를 풀이할 수 있다. 이를 통해 최적의 연 료 소모량과 각 구성요소의 거동을 구할 수 있다.
2.3 구성 요소 모델링
후방향 시뮬레이션을 수행하기 위해서는 차량을 구성하는 각 요소들의 모델링이 요구된다. 연비 해 석을 할 때에는 구성 요소들을 상세하게 모델링하 기 보다는 룩업 테이블로 구성된 준정적 모델을 사 용하여도 충분한 결과를 얻을 수 있다.
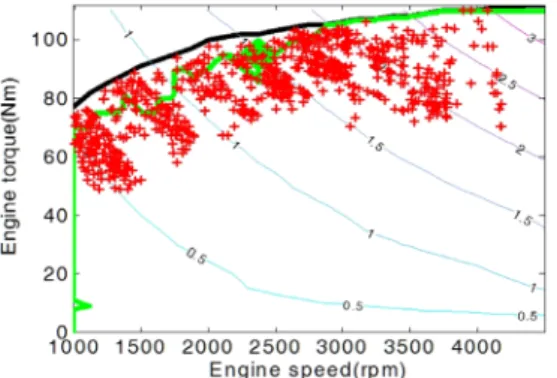
2.3.1 엔진 모델
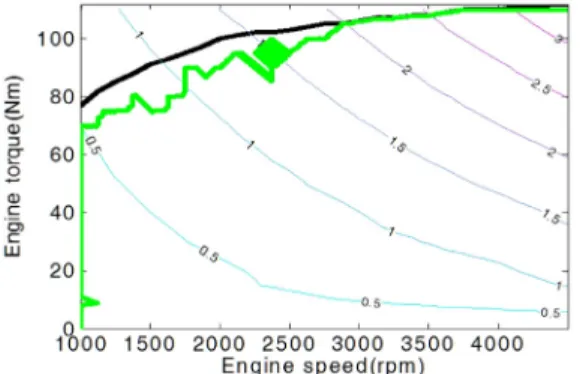
엔진 모델의 입력 값은 요구 토크와 회전 속도이 며 출력되는 값은 순간 연료소비율이고 식 (1)과 같 이 표현될 수 있다. 시뮬레이션에 사용된 엔진의 OOL(Optimal Operating Line)과 준정적 맵은 Fig. 1 과 같다.
(1)
where
: Instant fuel consumption (g/s)
: Torque of engine (Nm)
: Speed of engine (rad/s)
2.3.2 모터 & 발전기 모델
모터와 발전기는 동일한 제원과 동일한 모델을
사용하였다. 모터와 발전기 모델의 입력 값은 요구
토크와 회전 속도이며 출력되는 값은 전기적 요구
Jinseong Kim․Yeongil Park
Fig. 1 Engine map for simulation
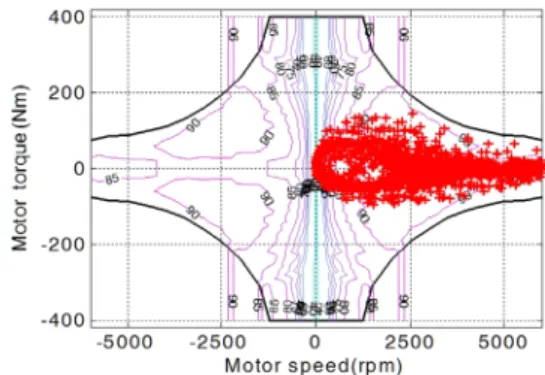
동력이고 식 (2)로 표현될 수 있다. 시뮬레이션에 사 용된 모터와 발전기의 준정적 맵은 Fig. 2 와 같다.
⋅
⋅(2) where
: Electric power of motor (W)
: Torque of motor (Nm)
: Speed of motor (rad/s)
: Efficiency of motor (%)
Fig. 2 Motor & generator map for simulation
2.3.3 배터리 모델
배터리 모델은 내부저항 모델을 이용하였고 배터 리의 SOC 변화량은 식 (3)을 통해 계산될 수 있다.
배터리 전압과 내부 저항은 SOC의 함수로서 Fig. 3 과 같은 준정적 맵을 사용하였다.
⋅
(3)
Fig. 3 Battery map for simulation
where
: Capacity of battery (Ah)
: Open circuit voltage of battery (V)
: Internal resistance (Ω)
: Output power of battery (W)
2.3.4 인버터 모델인버터는 단순한 고정 효율을 적용하여 식 (4)와 같이 계산하였다.
(4) where
: Efficiency inverter (%)
2.3.5 주행 부하
평지에서의 주행부하는 관성력, 구름 저항력, 공 기 저항력을 적용하였으며 식 (5)와 같다.
(5) where
: Load road (N)
: Mass of vehicle (kg)
: Acceleration of vehicle (m/s
2)
: Coefficient of rolling resistance
: Gravity (m/s
2)
: Air density (kg/m
3)
: Frontal area of vehicle (m
2)
: Coefficient of aero dynamic drag
: Velocity of vehicle (m/s)
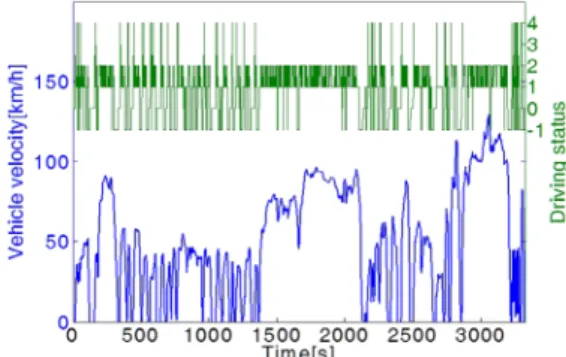
2.4 주행모드와 주행 부하
연비 분석을 위해서 특정 주행모드에 대한 결과
보다는 다양한 주행 패턴에 대한 특성 분석을 위해
Proposal of a Novel Plug-in-hybrid Power System Based on Analysis of PHEV System
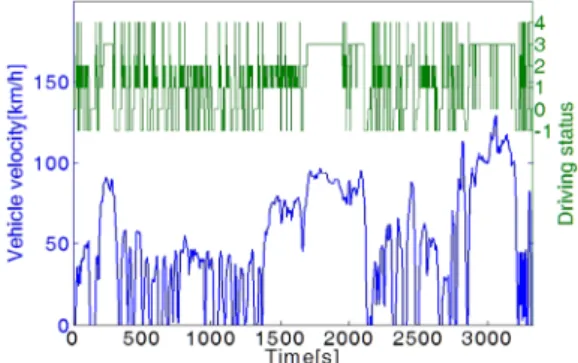
Fig. 4 Driving cycle for simulation
UDDS, HWFET, SC03, US06 등 4개의 사이클을 조 합하여 Fig. 4와 같은 주행 사이클을 구성하여 사용 하였다.
3. PHEV 시스템 분석
PHEV 시스템 특성에 적합하도록 개발되어 적용 된 H사의 PHEV 시스템 구조를 소개하고 주행시 구 성요소의 작동 특성을 분석하였다.
기존 PHEV 시스템은 전기구동이 많은 시스템의 특성을 살려 특히 전기구동 모드에서의 효율이 우 수하도록 개발된 시스템이다.
3.1 기존의 하이브리드 시스템
기존 시스템은 클러치를 통해 직렬형 시스템과 병렬형 시스템 간의 전환이 가능한 구조로 개발되 었으며 직렬형과 병렬형 시스템의 장점을 활용할 수 있고 동력전달 구조는 Fig. 5와 같다.
이 시스템은 구동 모터가 일반 차량의 2단 기어 수준에 연결되어 있으며, 발전기와 엔진은 5단 기어 수준에 연결되어 있다. 기본적으로 저속에서는 클 러치가 해제된 상태에서 순수 전기 구동이나 직렬 형 시스템으로 구동되며 고속에서 클러치가 연결된 상태의 병렬형 시스템으로 구동된다. 구동 모터는 회생제동시에는 발전기로서 활용될 수 있지만 발전
Fig. 5 Structure of series-parallel system
기는 구조상 구동 모터로서 활용될 수 없고 순수하 게 발전용으로 사용된다.
3.2 주행 특성 분석
주행 사이클에서 일부 구간에서 요구 성능을 만 족하지 못하였고 이 구간을 제외하고 시뮬레이션으 로 계산된 연비는 23.59 [km/l]이다.
Fig. 6 ~ Fig. 8은 엔진과 모터 그리고 발전기의 작 동점을 나타낸다. 모터의 속도 범위의 한계로 인해 엔진은 약 2600[RPM] 이하에서 주로 하이브리드 모 드로 구동되었으며, 약 2600[RPM] 이상에서는 엔진 만으로 작동되었음을 알 수 있다. 엔진의 작동은 엔 진의 OOL 과는 거리가 있는 작동점이 많이 존재하 며 특히 고속 영역에서는 연비 효율이 낮은 저토크 영역이 많이 사용되고 있음을 알 수 있다. 구동용 모 터는 구동과 회생 제동, 충전 등으로 구동되었으며 전 속도 영역에서 사용되므로 큰 용량의 고성능 모 터의 사용이 요구된다. 발전기는 직렬형 모드에서 만 구동되므로 효율이 좋은 지점에서 발전용으로만
Fig. 6 Operating point of engine for series-parallel system
Fig. 7 Operating point of motor for series-parallel system
김진성․박영일
Fig. 8 Operating point of generator for series-parallel system
Fig. 9 Driving mode for series-parallel system
쓰이는 결과를 보이고 있고 전체 작동 시간은 매우 적은 편으로 발전기 용량이 크게 적용된 것으로 판 단된다.
Fig. 9는 주행모드에 대하여 차량의 구동 모드를 나타내는 그림이다. -1은 회생 제동 모드, 0은 정지 모드, 1은 전기 구동 모드, 2는 병렬형 하이브리드 모 드, 3은 엔진 구동 모드, 4는 직렬형 하이브리드 모드 를 나타낸다. 클러치의 동적 거동이 고려하지 않았 으나 각 모드의 작동 과정에 대한 분석이 가능하다.
3.3 기존 PHEV 시스템의 취약점
하이브리드 시스템은 다양한 구동이 가능해질수 록 더 좋은 연비 성능을 가질 가능성이 더 높아진다.
그러나 기존 PHEV 시스템은 구동용 모터는 차량의 구동 뿐 아니라 회생 제동이나 충전 모드 등을 통해 발전기로서도 많이 사용되고 있지만 발전기는 오직 발전용으로만 사용되어 사용량이 비교적 적은 편이 다. 구동용 모터는 넓은 작동 영역에서 사용되어야 하므로 모터의 용량도 커야 하고 고성능이어야 한
다. 엔진의 경우에는 OOL에서 멀리 떨어진 작동점 이 많이 존재하여 연비성능에 좋지 않은 영향을 미 치고 있음을 알 수 있다.
4. 신 PHEV 동력전달 시스템 제안 기존 PHEV 시스템이 가지는 단점을 보완할 수 있는 새로운 시스템을 제안하고자 한다.
4.1 제안 PHEV 시스템 - I
기존의 PHEV 시스템에서 발견된 단점을 보완하 기 위해 Fig. 10과 같이 엔진과 발전기사이에 클러치 를 추가하였다. 추가된 클러치는 엔진과 발전기를 기계적으로 분리해주는 역할을 하여 발전용 모터는 엔진과 독립적인 구동이 가능해진다. 전기 구동 모 드는 기존의 구동용 모터를 이용하는 저속 전기 구 동 모드와 발전용 모터를 이용하는 중속 전기 구동 모드로 분리될 수 있고, 고속영역에서는 엔진 만의 구동 또는 하이브리드 모드로 고속엔진 구동 모드 의 구현이 가능하게 된다. 구동용 모터의 부담이 줄 어 비교적 작은 용량의 적용이 가능해 진다. 병렬형 하이브리드 모드는 엔진과 구동용 모터와 발전용 모터를 같이 활용하므로 보다 효율적인 구동이 가 능해진다.
회생제동시에는 구동용 모터와 발전용 모터가 모 두 사용될 수 있으며 저속과 고속 기어비를 통해 2 단으로 회생제동 효율을 향상시킬 수 있다.
요구 성능을 만족하며 전체 주행사이클 주행이 가능하였고 계산된 연비는 29.04[km/l]이다.
Fig. 11에 나타난 엔진 작동점은 기존 PHEV 시스 템과 달리 약 2600[RPM] 이상에서도 엔진의 효율이 좋은 OOL에 근접하는 작동점에서 작동하였다. Fig. 12 와 같이 구동용 모터의 작동점도 보다 효율적인 작 동되고 있고 용량의 여유가 있어 비교적 작은 용량 을 사용하여도 된다. 이는 Fig. 13에서 보듯 구동용
Fig. 10 Structure of proposed system - I
PHEV 시스템의 분석을 통한 신 PHEV 동력 시스템 제안
Fig. 11 Operating point of engine for proposed system - I
Fig. 12 Operating point of motor for proposed system - I
Fig. 13 Operating point of generator for proposed system - I
모터의 저토크 영역에서 작동되던 부분을 고단의 기어에 연결된 발전용 모터가 대신 작동함으로서 전기구동 모드의 효율을 향상시키고 있고 발전용 모터의 사용량이 증가하였음을 알 수 있다.
Fig. 14를 보면 직렬형 구동보다는 병렬형 구동이 더 지배적이라는 것을 확인할 수 있고 발전용 모터 를 구동에 활용하게 되어 엔진만으로 구동되던 엔 진 구동 모드가 감소하였다.
Fig. 14 Driving mode for proposed system - I
4.2 제안 PHEV 시스템 - II
앞서 제안된 제안 PHEV 시스템-I의 분석을 통해 활용도가 낮은 직렬형 구동을 포기하는 구조를 새 로운 PHEV 시스템-II로 제안하고자 한다. 이 PHEV 시스템은 Fig. 15와 같이 직렬형 구동을 위해 필요했 던 발전용 모터와 구동계 사이의 클러치를 제거하 여 구현할 수 있다.
제안 PHEV 시스템-II도 구동용 모터를 이용하는 저속 전기 구동 모드와 발전용 모터를 이용하는 중 속 전기 구동 모드 그리고 고속 엔진/하이브리드 구 동 모드의 구동이 가능하다. 회생제동에 서도 저속 과 고속 기어비로 2단으로 회생제동 효율을 향상시 킬 수 있다.
제시된 주행 사이클 안에서 모든 요구 성능을 만 족하였으며 계산된 연비는 28.98[km/l]이다. 직렬 형 구동을 포기하였으나 제안 PHEV 시스템-I과 큰 차이가 없는 연비가 산출되었다. 이것은 실제로 연 비에 대한 직렬형 구동의 효과가 미비함을 시사한 다. Fig. 16 ~ Fig. 18은 제안 시스템-I의 해석 결과와 비교하여 눈에 띄는 차이가 없다. Fig. 19를 살펴보 면 직렬형 하이브리드 모드가 없어진 것을 확인할 수 있다.
이 시스템은 클러치를 하나 제거함으로써 시스템 구성비용 절감과 차량의 중량 감소를 통한 효과와
Fig. 15 Structure of proposed system - II
Jinseong Kim․Yeongil Park
Fig. 16 Operating point of engine for proposed system - II
Fig. 17 Operating point of motor for proposed system - II
Fig. 18 Operating point of generator for proposed system - II
함께 하이브리드 제어 및 클러치 제어가 단순해지 는 효과도 기대된다.
해석 결과를 통해 검토된 시스템의 취약점은 차 량이 저속으로 주행할 때 엔진을 사용할 수 없는 것 이지만 일반적으로 저속에서는 엔진을 단독으로 사 용하지 않기 때문에 제어를 통해 모터를 적절하게 사용하면 극복이 가능한 취약점으로 판단된다.
Fig. 19 Driving mode for proposed system - II
5. 결 론
본 논문에서는 기존의 PHEV 시스템에 대한 분석 을 통해 시스템이 지니고 있는 문제점을 보완한 새 로운 구조의 PHEV 시스템을 제안하였으며 연구 결 과를 정리하면 다음과 같다.
1) 기존 PHEV 시스템에 대한 주행 특성 해석을 수 행한 결과, 발전용 모터는 직렬형 모드의 발전용 으로만 사용되며 엔진과 구동용 모터의 작동점 이 효율이 좋지 않은 영역을 많이 사용한다는 기 존 시스템의 취약점이 발견되었다.
2) 발견된 기존 PHEV 시스템의 취약점을 극복 할 수 있도록 클러치 하나를 추가한 제안 PHEV 시 스템-I을 제안하고 주행 특성 해석을 수행하였 다. 제안 시스템-I은 저속에서 두 개의 모터가 구 동을 분담하고 엔진도 효율이 좋은 영역을 사용 하게 되었으며 연비는 기존 시스템에 비하여 27% 의 연비 증대 효과가 발생하였다.
3) 제안 PHEV 시스템-I에서 직렬형 구동을 포기하 기 위하여 발전용 모터와 구동계 사이의 클러치 를 제거한 제안 PHEV 시스템-II의 주행 특성 해 석을 수행하였다. 연비 성능에서 약간의 저하가 발생하였으나 제안 PHEV 시스템-I과 큰 차이가 없었다. 클러치를 하나 제거하여 경제적인 효과 와 제어에서의 장점을 가질 수 있게 된다. 그러나 이 시스템은 엔진이 저속 주행시에 동력을 전달 할 수 없다는 취약점을 가지고 있다.
향후에 제안 시스템의 최적 동력원 용량 매칭과
최적의 기어비를 선정함으로서 최적의 시스템 구성
이 가능할 것으로 생각된다.
Proposal of a Novel Plug-in-hybrid Power System Based on Analysis of PHEV System