Copyright
Ⓒ2015 KSAE / 134-14 pISSN 1225-6382 / eISSN 2234-0149
DOI http://dx.doi.org/10.7467/KSAE.2015.23.1.112Transactions of KSAE, Vol. 23, No. 1, pp.112-121 (2015)
출력분기 기반 플러그인 하이브리드 전기자동차의 동력전달 시스템 특성 분석
김 정 민*
안동대학교 기계자동차공학과
Analysis of Powertrain Characteristics for Output Split Type Plug-in Hybrid Electric Vehicle
Jeongmin Kim*
Department of Mechanical & Automotive Engineering, Andong National University, Gyeongbuk 760-749, Korea (Received 1 September 2014 / Revised 16 October 2014 / Accepted 23 October 2013)
Abstract : In this paper, powertrain of output split type plug-in hybrid electric vehicle is analyzed for the operation range of speed, torque, and power. First, it is assumed that the efficiency of motor is 100%. And, the speed and torque equations are derived based on the lever analogy. With the above equations, the simulations are performed for the powertrain of output split type plug-in hybrid electric vehicle. From the simulation results, it is found that the output torques of EV1 and series modes are larger than the EV2 and power split modes’ ones. It means the EV1 and series modes can be used for the rapid acceleration. But the EV1 and series modes can be used only the velocity of under the 120 km/h. It is because the motor reaches its maximum speed when the velocity is over the 120 km/h for the EV1 and series modes. When the engine is turned on, the engine power is transmitted through the two motors. But, the power split mode shows the power split of engine at the output shaft, and it has the point of zero motor power. Thus, the transmission efficiency of the power split mode can be higher than the series mode’s one, it the motor efficiency is considered.
Key words : Plug-in hybrid electric vehicle(플러그인 하이브리드 전기자동차), Output split(출력분기), Powertrain (파워트레인), Vehicle simulation(차량 시뮬레이션), Power characteristic(동력특성)
1. 서 론1)
전기자동차는 원자력, 수력, 풍력 등의 석유를 대 체하는 에너지를 사용할 수 있으며, 주행 중 배기가 스를 배출하지 않지 않는다. 때문에, 전기자동차는 친환경 자동차 개발의 최종 목적이라 볼 수 있다. 하 지만, 전기자동차의 높은 배터리 가격과 짧은 일충 전 주행거리 등의 단점 때문에, 전기자동차의 보급 확산이 더디게 진행되고 있다.
때문에 내연기관자동차와 전기자동차의 중간 성
*
Corresponding author, E-mail: [email protected]
격인 하이브리드 전기자동차의 개발이 진행되었으 며, 최근에는 하이브리드 전기자동차에 전기자동차 의 개념을 강화한 새로운 개념의 플러그인 하이브 리드 전기자동차(Plug-in Hybrid Electric Vehicle)가 개발되었다.1) 플러그인 하이브리드 전기자동차는 일반 하이브리드 전기자동차에 비하여 큰 용량의 배터리가 적용되었으며, 이를 통하여 비교적 긴 거 리의 순수 전기차 모드 구현이 가능하다. 또한 플러 그인 하이브리드 전기자동차에 적용된 내연기관을 이용하면, 전기자동차의 단점인 짧은 주행거리 문 제 해결이 가능하다.2) 하지만, 플러그인 하이브리드
출력분기 기반 플러그인 하이브리드 전기자동차의 동력전달 시스템 특성 분석
Fig. 1 Configuration of GM plug-in hybrid electric vehicle
전기자동차는 엔진과 전기모터를 동시에 효율적으 로 구동하기 위한 동력전달 시스템이 요구된다.3) 미 국 지엠은 2010년 12월 세계최초의 양산 플러그인 하이브리드 전기자동차인 “Volt”를 출시하면서, 독 특한 동력전달 시스템을 적용하였다.4-6) Fig. 1은 미 국 지엠에서 개발한 플러그인 하이브리드 전기자동 차의 구조를 도시한 것이다. 엔진과 2개의 전기모터 (MG: Motor Generator)를 2개의 클러치, 1개의 브레 이크, 1개의 유성기어를 이용하여 조합한 구조이다.
이와 같은 구조는 클러치와 브레이크의 조작에 따 라 총 4개의 모드를 구현할 수 있다.
위 Fig. 1의 지엠 플러그인 하이브리드 전기자동 차 분석을 위하여, 먼저 구성 부품 분석을 위한 Tear- down 분석이 수행 된 바 있다.7) 또한, 클러치/브레이 크 배열에 따른 가속 및 연비 성능 해석이 수행되었 으며, 도심 주행 사이클과 같은 인증 사이클 주행 시 엔진 및 모터의 작동 특성 해석이 수행된 바 있다.8,9) 하지만, 플러그인 하이브리드 전기자동차의 핵심기 술인 동력전달 시스템 설계와 제어로직 개발 등에 참고하기 위한, 지엠 플러그인 하이브리드 전기자 동차 동력전달 시스템의 각 모드별 속도, 토크 및 파 워 특성분석이 수행되지 않았다.
때문에 본 연구에서는, 플러그인 하이브리드 전 기자동차의 핵심기술인 동력전달 시스템 설계와 제 어로직 개발 등을 위하여, 미국 지엠 플러그인 하이 브리드 전기자동차의 총 4개 모드에 대한 작동 속도 영역, 최대 구동 토크, 파워 해석 등을 통한 동력전 달 시스템 특성 분석을 수행하고자 한다.
2. 동력전달 시스템 동역학식 2.1 동력전달 시스템의 4개 모드
Table 1 Operation mode for GM plug-in hybrid electric vehicle
Mode Brake Clutch1 Clutch2
EV 1 O
EV 2 O
Series O O
Power split O O
Fig. 1에 도시된 연구대상 차량 동력전달 시스템 은 2개의 클러치와 1개의 브레이크 조작에 따라 Table 1과 같은 총 4개의 모드 구현이 가능하며, 각 모드의 특징은 아래와 같다.
- EV1 모드 : Brake만 작동할 경우 EV(electric vehicle)1 모드가 구현된다. EV1 모드는 내연기관의 작동 없이, 오직 전기모터에 의해서만 차량이 주행되 는 모드를 의미한다.
- EV2 모드 : Clutch1 만 작동할 경우 EV2 모드가 구 현된다. EV2 모드 역시 내연기관의 작동 없이, 오 직 전기모터에 의해서만 차량이 주행되는 모드를 의미한다.
- Series 모드 : Brake와 Clutch1 이 함께 작동할 경우 Series 모드가 구현된다. Series 모드는 엔진에서 발생되는 기계 동력을 MG1의 발전(generation)을 통하여 전기 동력을 생산하고, 이렇게 생산된 전 기 동력을 이용하여 MG2가 구동(motoring)을 하 여 차량이 주행되는 모드를 의미한다.
- Power split 모드 : Clutch1과 Clutch2 가 함께 작동 할 경우 Power split 모드가 구현된다. Power split 모드는 엔진에서 발생되는 기계 동력이 유성기어 를 통한 동력분기(power split)가 발생되어, 엔진의 동력이 구동축에 직접 전달되거나 MG1과 MG2를 통하여 전달되어 차량이 구동되는 모드를 의미한 다. 특히 엔진의 동력이 출력축에서 분기되기 때 문에, 이 모드에서 구성되는 구조는 출력분기(out- put split) 이다.10) 때문에, 연구대상 동력전달 시스 템을 출력분기 기반이라고 볼 수 있다.
2.2 4개 모드의 속도, 토크 관계식
위에서 정의된 4개 모드는 Brake와 Clutch 작동에 따라 각각 독립적인 속도, 토크 관계식을 갖게 된다.
연구대상 동력전달 시스템은 유성기어를 사용하고 있으며, 이 연구에서는 유성기어의 해석을 위하여
Jeongmin Kim
Lever analogy를 사용하고자 한다.11) 이를 통한 각 모 드별 속도, 토크 관계식은 아래와 같다.
- EV1 모드 : Clutch1과 Clutch2가 작동하고 있지 않 으므로, 차량 주행을 위하여 엔진과 MG1이 작동 할 수 없다. Brake가 작동하고 있으므로, 유성기어 의 Ring 기어의 속도는 0이다. 이를 고려한 EV1 모 드의 Lever 모델을 Fig. 2에 도시하였다.
(a) Speed lever model
(b) Torque lever model
Fig. 2 Lever model of EV1 modeFig. 2(a)는 EV1 모드의 속도레버를 도시한 것이 다. 속도레버 관계에 따라서 MG2 속도(
)와 출 력속도(
)의 관계는 다음과 같다.
(1) 위 식 (1)을 정리하면 다음과 같다.
×
(2)여기서, 은 Ring 기어의 잇수, 는 Sun 기어의 잇 수를 의미한다.
Fig. 2(b)는 EV1 모드의 토크레버를 도시한 것이 다. 토크레버 관계에 따라, MG2 토크()와 출력 토크()의 관계는 다음과 같다.
×
×
(3) 위 식 (3)을 정리하면 다음과 같다.
×
(4)위 식 (2)와 (4)에서 보는 바와 같이, MG2와 출력 (OUT)을 연결하는 유성기어는 기어비
을 갖는 감속기로 작동하는 것을 알 수 있다.- EV2 모드 : Clutch2가 작동하고 있지 않으므로, 차 량 주행을 위하여 엔진은 작동하지 않는다. 이를 고려한 EV2 모드의 Lever 모델을 Fig. 3에 도시하 였다.
(a) Speed lever model
(b) Torque lever model
Fig. 3 Lever model of EV2 modeFig. 3(a)는 EV2 모드의 속도레버를 도시한 것이 다. 속도레버 관계에 따라, MG1속도(
), MG2속 도(
) 및 출력속도(
)의 관계는 다음과 같다.
(5) 위 식 (5)를 정리하면 다음과 같다.
×
×
(6)위 식 (6)에서 보는 바와 같이, MG1, MG2 및 출력 (OUT) 총 3개의 속도가 서로 연계되어 있는 것을 알 수 있다.
Fig. 3(b)는 EV2 모드의 토크레버를 도시한 것이 다. 토크레버 관계에 따라 MG1토크(), MG2토 크() 및 출력토크()의 관계는 다음과 같다.
(7)
×
×
(8)Analysis of Powertrain Characteristics for Output Split Type Plug-in Hybrid Electric Vehicle
위 식 (7) 및 (8)을 정리하면 다음과 같다.
(9)
×
(10) 위 식 (7)에서 보는 바와 같이, 출력(OUT) 토크는 MG1 및 MG2 토크의 합으로 결정되므로, EV2 모드 에서는 MG1과 MG2 가 동시에 차량을 구동할 수 있 다. 다만, EV2 모드 구동시 MG1과 MG2 토크가 서 로 식 (8)을 만족하면서 제어되어야 한다.
- Series 모드 : Clutch1이 작동하고 있지 않으므로 엔진과 MG1은 차량을 직접 구동할 수 없다. 다만, Clutch2가 작동하고 있으므로, 엔진에서 발생되는 기계 동력을 MG1의 발전(generation)을 통하여 전 기 동력으로 변환하고, 이렇게 변환된 전기 동력 을 이용하여 MG2 구동(motoring)을 통하여 차량 이 주행될 수 있다. MG2를 이용하여 차량을 구동 하기 때문에 EV1 모드와 유사하지만, EV1 모드는 배터리의 충전율이 낮은 경우 사용할 수 없지만, Series 모드는 엔진의 동력을 이용하므로 배터리 충전율과 상관없이 사용할 수 있다.
Series 모드의 레버모델은 Fig. 2의 EV1 모드 레버 모델과 동일하다. 이에 MG2와 출력(OUT)의 속도 토크 관계는 식 (2) 및 (4)와 동일하다. 다만, 엔진과 MG1는 Clutch2를 통하여 연결되므로, 엔진과 MG1 의 속도 및 토크 관계는 다음과 같다.
(11)
(12)여기서,
는 엔진속도, 는 엔진토크를 의미한다.- Power split 모드 : Clutch1과 Clutch2가 작동하고 있 기 때문에, 엔진, MG1 및 MG2 에 의하여 차량이 구동된다. 이를 고려한 Power split 모드의 Lever 모델을 Fig. 4에 도시하였다.
Fig. 4(a)는 Power split 모드의 속도레버를 도시한 것이다. 속도레버 관계에 따라, 엔진속도(
), MG1속도(
), MG2속도(
) 및 출력속도(
) 의 관계는 다음과 같다.(a) Speed lever model
(b) Torque lever model
Fig. 4 Lever model of Power split mode
(13)
(14) 위 식 (14)를 정리하면 다음과 같다.
×
×
(15)위 식 (13), (14) 및 (15)에서 보는 바와 같이, 엔진, MG1, MG2 및 출력(OUT) 총 4개의 속도가 서로 연 계되어 있는 것을 알 수 있다.
Fig. 4(b)는 Power split 모드의 토크레버를 도시한 것이다. 토크레버 관계에 따라 엔진토크(), MG1토크(), MG2토크() 및 출력토크() 의 관계는 다음과 같다.
(16)
×
×
(17) 위 식 (16) 및 (17)을 정리하면 다음과 같다.
(18)
×
(19)위 식 (18)에서 보는 바와 같이, 출력(OUT) 토크 는 엔진, MG1 및 MG2 토크의 합으로 결정되므로 Power split 모드에서는 엔진, MG1과 MG2 가 동시 에 차량을 구동할 수 있다. 다만, Power split 모드 구
김정민
동시 엔진, MG1 및 MG2 토크가 서로 식 (19)를 만족 하면서 제어되어야 한다.
2.3 엔진 구동 시 전기시스템 관계식 플러그인 하이브리드 전기자동차의 경우, 차량 의 빠른 가속 혹은 배터리 충전율 유지를 위하여 배 터리 파워를 0이 아닌 값으로 제어할 수 있다. 하지 만 엔진이 구동될 경우, 대부분 배터리 파워가 0으 로 제어되어 차량이 구동된다. 이에, 이 연구에서는 엔진이 구동되는 모드에서 배터리 파워 가 0 이라고 가정하였다. MG1, MG2 및 배터리는 전기적 으로 연결되어 있으므로, 이 셋의 파워(power) 합은 항상 0이어야 한다. 이에 MG1, MG2 및 배터리의 파 워 관계를 다음과 같이 표현할 수 있다.
(20)여기서, 은 MG1의 전기 파워, 은 MG2 의 전기적 파워, 는 배터리 파워를 의미한다.
이 연구에서 를 0으로 가정하면, 위 식 (20)은 다음과 같이 정리된다.
(21)본 연구에서는 동력전달 시스템의 속도, 토크, 파 워 흐름 해석을 목적으로 한다. 전기모터의 효율을 고려할 경우, 엔진 파워가 MG1, MG2, OUT으로 전 달되는 흐름 외에 MG1과 MG2 파워 손실 흐름까지 존재하며, 이럴 경우 동력전달 시스템의 파워 흐름 해석이 복잡해진다. 때문에 MG1과 MG2의 효율을 100%로 가정하였으며, 과 를
, ,
, 를 이용하여 표현하면, 위 식 (21)은 다음 과 같이 표현할 수 있다.
×
×
(22) 위 식 (22)를 이용하면, 엔진이 구동될 경우 동력 전달 시스템의 해석이 가능해 진다.3. 동력전달 시스템 해석 3.1 연구대상 차량 제원
Table 2에 연구대상 차량에 적용된 엔진, 전기모 터, 배터리 등의 제원을 정리하였다. 63kW 급 엔진
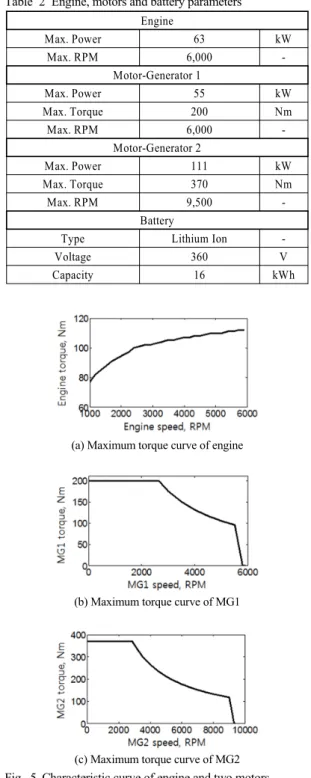
Table 2 Engine, motors and battery parameters Engine
Max. Power 63 kW
Max. RPM 6,000 -
Motor-Generator 1
Max. Power 55 kW
Max. Torque 200 Nm
Max. RPM 6,000 -
Motor-Generator 2
Max. Power 111 kW
Max. Torque 370 Nm
Max. RPM 9,500 -
Battery
Type Lithium Ion -
Voltage 360 V
Capacity 16 kWh
(a) Maximum torque curve of engine
(b) Maximum torque curve of MG1
(c) Maximum torque curve of MG2
Fig. 5 Characteristic curve of engine and two motors이 사용되었으며, 전기모터(MG1, MG2)는 각각 최 대출력 55kW 및 110kW이다. MG1은 주로 엔진과 직결되어 사용하기 때문에 최고회전속도가 엔진의
출력분기 기반 플러그인 하이브리드 전기자동차의 동력전달 시스템 특성 분석
Table 3 Transmission, tire and vehicle body parameters Transmission
Planetary gear ratio
(
) 2.24 -Final gear ratio 3.02 -
Tire
Tyre size 215/55R17 -
Weights & Dimensions
Cerb weight 1,715 kg
Cd 0.28 -
Frontal area 2.16 m2
최고회전속도인 6,000RPM과 같으며, MG2는 비교 적 빠른 9,500RPM이다. 이와 같은 엔진과 전기모터 의 최대 출력 및 속도는, 회전속도에 따른 최대토크 선도로 표현할 수 있다. Fig. 5는 엔진과 2개의 전기 모터의 최대토크 선도를 도시한 것이다. 회전속도 가 결정되면, 엔진과 전기모터가 구현할 수 있는 최 대 토크를 이 선도를 통하여 알 수 있다.
Table 3에 연구대상 차량에 적용된 동력전달 시스 템의 기어비, 타이어, 차량 질량 및 공기저항 계수 등의 제원을 정리하였다. 동력전달 시스템의 Ring 기어와 Sun 기어 잇수비는 2.24 이며, 최종 감속비는 3.02이다. 연구 대상 차량에 사용된 타이어 제원을 통하여, 휠 반경은 0.334m 임을 알 수 있다. 차량질 량은 1,715 kg이며, 공기저항계수는 0.28이다.
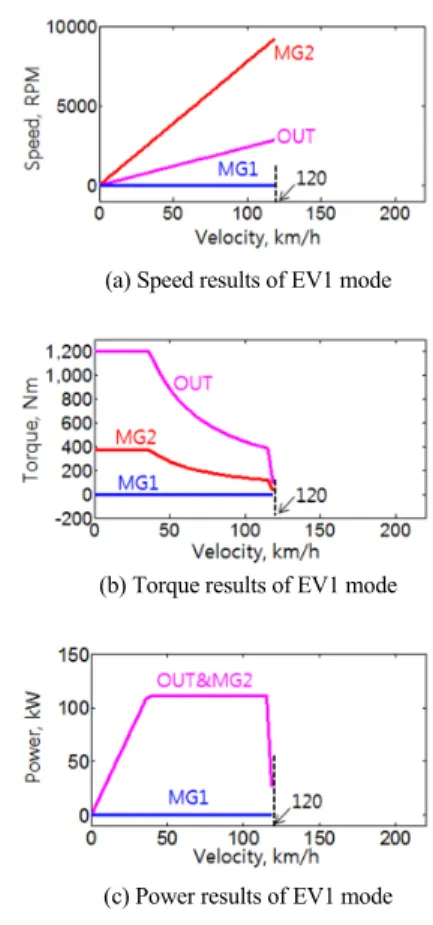
3.2 엔진을 사용하지 않는 모드의 특성분석 연구 대상 동력전달 시스템은 총 4개의 모드를 구 현할 수 있으며, 엔진을 사용하지 않는 모드는 EV1 및 EV2 모드이다. 이들 모드에 대하여 최대 출력으 로 주행 시 속도, 토크 및 파워 특성 해석 결과를 Fig. 6 및 Fig. 7에 도시하였다.
Fig. 6(a)는 EV1 모드로 주행 시 MG1, MG2 및 출 력축(OUT) 속도를 도시한 것이다. EV1 모드에서는 MG1이 사용되지 않으므로, MG1의 속도가 0인 것 을 볼 수 있다. MG2의 속도와 OUT의 속도는 식 (2) 와 같이 일정한 비율(3.24)을 갖는 것을 볼 수 있다.
차량속도가 약 120km/h에 도달하게 되면, MG2의 속도는 약 9500RPM에 도달하게 된다. MG2의 최대 속도가 9500RPM 이므로, 더 이상 EV1 모드를 구현 할 수 없다. Fig. 6(b)는 EV1 모드로 주행 시 MG1,
(a) Speed results of EV1 mode
(b) Torque results of EV1 mode
(c) Power results of EV1 mode
Fig. 6 Analysis results of EV1 modeMG2 및 출력축(OUT) 토크를 도시한 것이다. EV1 모드에서는 MG1이 사용되지 않으므로, MG1의 토 크가 0 인 것을 볼 수 있다. MG2 토크는 차량의 속도 가 증가함에 따라 Fig. 5(c)의 MG2 최대 토크선도에 따른 최대토크가 구현되며, 이렇게 구현된 MG2 토 크는 식 (4)와 같이 일정한 비율(3.24)로 증배되어 출 력(OUT)토크로 구현되는 것을 볼 수 있다. Fig. 6(c) 는 EV1 모드로 주행 시 MG1, MG2 및 출력축(OUT) 파워를 도시한 것이다. EV1 모드에서는 MG1이 사 용되지 않으므로, MG1의 파워가 0인 것을 볼 수 있 다. EV1 모드에서는 MG2에 의해서만 차량이 구동 되므로, MG2 파워와 출력(OUT)파워가 같은 것을 볼 수 있다.
Fig. 7(a)는 EV2 모드로 주행 시 MG1, MG2 및 출 력축(OUT) 속도를 도시한 것이다. 차량속도가 증가 함에 따라 출력(OUT) 속도가 증가하며, MG1 및 MG2 속도는 식 (6)에 따라 결정되는 것을 볼 수 있 다. Fig. 7(b)는 EV2 모드로 주행 시 MG1, MG2 및 출
Jeongmin Kim
(a) Speed results of EV2 mode
(b) Torque results of EV2 mode
(c) Power results of EV2 mode
Fig. 7 Analysis results of EV2 mode력축(OUT) 토크를 도시한 것이다. MG1과 MG2 토 크는 식 (10)을 만족하면서, 식 (9)에 따라 출력 (OUT)토크가 형성되는 것을 볼 수 있다. EV2 모드 의 출력(OUT)토크는 EV1 모드의 출력(OUT)토크에 비하여 상대적으로 작은 것을 볼 수 있다. 이는 EV1 모드가 EV2 모드에 비하여 가속성능이 우수하다는 것을 의미한다. Fig. 7(c)는 EV2 모드로 주행 시 MG1, MG2 및 출력축(OUT) 파워를 도시한 것이다.
EV2 모드에서는 유성기어가 동력분기장치로서 작 동하며, 차량속도가 약 120km/h 전까지는 MG2가 구동(motoring)한 파워를 MG1이 발전(generating)을 하는 것을 볼 수 있다. 차량속도가 약 120km/h 이후 에는 MG1과 MG2가 함께 구동(motoring)하는 것을 볼 수 있다. 출력(OUT)파워는 MG1 과 MG2 파워의 합과 같다.
엔진이 사용되지 않는 EV1 및 EV2 모드에서는 Fig. 6 및 Fig. 7에서 보는 것과 같이, EV1 모드가 EV2 모드에 비하여 큰 출력(OUT)토크가 형성되며,
이는 EV1 모드가 EV2 모드에 비하여 좀 더 우수한 가속성능을 구현할 수 있음을 의미한다. 다만, EV1 모드의 경우에는, 차량 속도 120km/h 이후에는 MG2 속도가 최고속도에 도달하여 사용할 수 없다.
이에 차량속도 120km/h 이후에는 EV2 모드를 사용 하여야 한다.
3.3 엔진을 사용하는 모드의 특성분석 연구 대상 동력전달 시스템은 총 4개의 모드를 구 현할 수 있으며, 엔진을 사용하는 모드는 Series 및 Power split 모드 이다. 이들 모드에 대하여 최대 출 력으로 주행 시 속도, 토크 및 파워 특성 해석 결과 를 Fig. 8 및 Fig. 9에 도시하였다.
Fig. 8(a)는 Series 모드로 주행 시 엔진, MG1, MG2 및 출력축(OUT) 속도를 도시한 것이다. 차량속도가 증가함에 따라 엔진의 최대 출력 구현을 위하여, 엔 진속도는 증가하는 것을 볼 수 있다. MG1은 엔진과 같은 축을 사용하기 때문에, 식 (11)과 같이 엔진과 MG1 은 같은 속도를 갖는다. 이때 MG2의 속도와 OUT의 속도는 식 (2)와 같이 일정한 비율(3.24)을 갖 는 것을 볼 수 있다. 차량속도가 약 120km/h에 도달 하게 되면, MG2의 속도는 약 9500RPM에 도달하게 된다. MG2의 최대속도가 9500RPM 이므로, 더 이상 Series 모드를 구현할 수 없다. Fig. 8(b)는 Series 모드 로 주행 시 엔진, MG1, MG2 및 출력축(OUT) 토크 를 도시한 것이다. 엔진 토크는 차량의 속도가 증가 함에 따라 Fig. 5(a)의 엔진 최대 토크선도에 따른 최 대토크가 구현되며, 이렇게 구현된 엔진 토크는 식 (12)와 같이 MG1이 크기는 같으면서 부호가 반대인 발전토크를 형성한다. MG2 토크는 식 (22)에 따른 토크가 구현되며, 이렇게 구현된 MG2 토크는 식 (4) 와 같이 일정한 비율(3.24)로 증배되어 출력(OUT) 토크로 구현되는 것을 볼 수 있다. Fig. 8(c)는 Series 모드로 주행 시 엔진, MG1, MG2 및 출력축(OUT) 파워를 도시한 것이다. Series 모드에서는 엔진에서 발생한 파워를 MG1이 발전(generating)하여 전기파 워로 변환하므로, 엔진과 MG1 파워는 크기는 같으 며 부호가 반대이다. 이렇게 변환된 MG1 파워는, 식 (21)과 같이 다시 MG2에 의하여 차량 구동에 사용 되며, 이때 MG2 파워와 출력(OUT)파워는 같다. 즉,
Analysis of Powertrain Characteristics for Output Split Type Plug-in Hybrid Electric Vehicle
(a) Speed results of series mode
(b) Torque results of series mode
(c) Power results of series mode
Fig. 8 Analysis results of series modeSeries 모드에서는 엔진, MG2, 출력(OUT) 파워가 같 으며, MG1 파워는 크기는 같으며 부호가 반대이다.
Fig. 9(a)는 Power split 모드로 주행 시 엔진, MG1, MG2 및 출력축(OUT) 속도를 도시한 것이다. 차량 속도가 증가함에 따라 엔진의 최대 출력 구현을 위 하여, 엔진속도는 증가하는 것을 볼 수 있다. MG1은 엔진과 같은 축을 사용하기 때문에, 식 (13)과 같이 엔진과 MG1 은 같은 속도를 갖는다. 이때 MG2 속 도와 출력(OUT) 속도는 식 (15)에 따라 결정되는 것 을 볼 수 있다. Fig. 9(b)는 Power split 모드로 주행 시 엔진, MG1, MG2 및 출력축(OUT) 토크를 도시한 것 이다. 엔진 토크는 차량의 속도가 증가함에 따라 Fig. 5(a)의 엔진 최대 토크선도에 따른 최대토크가 구현되며, 이렇게 구현된 엔진 토크는 식 (19) 및 (22)에 따라 MG1 및 MG2 토크가 결정된다. 출력 (OUT)토크는 식 (18)에 따라 엔진, MG1, MG2 토크 의 합으로 형성되는 것을 볼 수 있다. Power split 모
(a) Speed results of power split mode
(b) Torque results of power split mode
(c) Power results of power split mode
Fig. 9 Analysis results of power split mode드의 출력(OUT)토크는 Series 모드의 출력(OUT)토 크에 비하여 상대적으로 작은 것을 볼 수 있다. 이는 Series 모드가 Power split 모드에 비하여 가속성능이 우수하다는 것을 의미한다. Fig. 8(c)는 Power split 모드로 주행 시 엔진, MG1, MG2 및 출력축(OUT) 파워를 도시한 것이다. 이 연구에서 사용된 동력전 달 시스템은 출력분기 시스템으로, Power split 모드 에서 엔진 파워는 출력축에서 분기가 이루어진다.
분기된 파워는 직접 출력축으로 전달되거나 MG1 과 MG2에 의하여 전달된다. 이에 MG1과 MG2 파워 는 동력 전달을 위하여 서로 크기가 같고 부호가 반 대인 것을 볼 수 있다. 특히, 차량속도 약 90km/h 이 하 구간에서는 MG1과 MG2를 통하여 전달되는 파 워의 크기가 상대적으로 크며, 약 90km/h 이후 구간 에서는 점차 감소하여 차량속도가 약 165km/h 인 경 우에는 MG1과 MG2 파워가 0을 보인다. 이때에는, 출력분기가 발생하지 않고, 모든 엔진 파워가 직접 출력축으로 전달된다. 이 연구에서는 MG1과 MG2
김정민
의 효율을 무시하였으므로, 엔진 파워의 분기가 이 루어진 후 다시 출력축으로 전달되기 때문에, 엔진 과 출력(OUT) 파워는 같은 것을 볼 수 있다.
엔진이 사용되는 Series 및 Power split 모드에서는 Fig. 8 및 Fig. 9에서 보는 것과 같이, Series 모드가 Power split 모드에 비하여 상대적으로 큰 출력(OUT) 토크가 형성된다. 이는 Series 모드가 Power split 모 드에 비하여 좀 더 우수한 가속성능을 구현할 수 있 음을 의미한다. 다만, Series 모드의 경우에는, 차량 속도 120km/h 이후에는 MG2 속도가 최고속도에 도 달하여 사용할 수 없다. 이에 차량속도 120km/h 이 후에는 Power split 모드를 사용하여야 한다. 또한, Power split 모드는 MG1과 MG2의 파워가 0 되는 운 전점을 보유하고 있으므로, MG1과 MG2의 효율을 고려한다면 Power split 모드가 Series 모드에 비하여 좀 더 높은 동력전달 효율을 보일 수 있음을 예상할 수 있다.
4. 결 론
본 연구에서는 플러그인 하이브리드 전기자동차 의 핵심기술인 동력전달 시스템 설계와 제어로직 개발 등을 위하여, 출력분기 기반인 미국 지엠 플러 그인 하이브리드 전기자동차의 총 4개 모드에 대한 작동 속도 영역, 최대 구동 토크 등을 통한 동력전달 시스템 특성 분석을 수행하였다. 먼저, 레버해석 (lever analogy)를 이용하여 4개 모드에 대한 독립적 인 속도, 토크 관계식을 유도하였으며, 이 식들을 이 용하여 각 모드에 대한 속도, 토크, 파워 해석 결과 를 도출 하였다. 해석 결과를 바탕으로 출력분기 기 반 미국 지엠 플러그인 하이브리드 전기자동차의 총 4개 모드에 대한 작동 속도 영역, 최대 구동 토크, 파워 등의 동력전달 시스템 특성 분석 결과를 도출 하였다. 엔진이 사용되지 않는 EV1 및 EV2 모드에 서는, EV1 모드가 EV2 모드에 비하여 큰 출력토크 가 형성되며, 이는 EV1 모드가 EV2 모드에 비하여 좀 더 우수한 가속성능을 구현할 수 있음을 의미한 다. 다만, EV1 모드의 경우에는, 차량 속도 120km/h 이후에는 MG2 속도가 최고속도에 도달하여 사용 할 수 없다. 이에 차량속도 120km/h 이후에는 EV2 모드를 사용하여야 한다. 엔진이 사용되는 Series 및
Power split 모드에서는, Series 모드가 Power split 모 드에 비하여 큰 출력토크가 형성되며, 이는 Series 모드가 Power split 모드에 비하여 좀 더 우수한 가속 성능을 구현할 수 있음을 의미한다. 다만, Series 모 드의 경우, 차량 속도 120km/h 이후에는 MG2 속도 가 최고속도에 도달하여 사용할 수 없다. 이에 차량 속도 120km/h 이후에는 Power split 모드를 사용하여 야 한다. 또한, Power split 모드는 MG1 과 MG2의 파 워가 0 되는 운전점을 보유하고 있으므로, MG1 과 MG2의 효율을 고려한다면 Power split 모드가 Series 모드에 비하여 좀 더 높은 동력전달 효율을 보일 수 있음을 예상할 수 있다.
본 연구를 통하여 얻은 결과는, 연구대상 플러그 인 하이브리드 전기자동차의 제어전략 개발 및 새 로운 플러그인 하이브리드 전기자동차 동력전달 시 스템 설계에 활용 될 수 있을 것으로 기대된다.
후 기
이 논문은 2014학년도 안동대학교 학술연구조성 비 에 의하여 연구되었음.
References
1) R. Ghorbani, E. Bibeau and S. Filizadeh, “On Conversion of Hybrid Electric Vehicles to Plug-in,” IEEE Transactions on Vehicular Tech- nology, Vol.59, No.4, pp.2016-2020, 2010.
2) S. Kwon, Y. Choi, H. Park, Y. Seo and S. Park,
“Research on PHEV Vehicle Test Procedures and Measurement of Energy Consumption Efficiency and Electric Driving Range,” KSAE Spring Conference Proceedings, pp.1767-1770, 2013.
3) N. Kim, M. Duoba, N. Kim and A. Rousseau,
“Validating Volt PHEV Model with Dynamo- meter Test Data Using Autonomie,” SAE 2013- 01-1458, 2013.
4) H. Lee, J. Won, C. Cho and M. Lee, “A Study on Performance Characteristics of Air Condi- tioning System for GM Volt(PHEV),” KSAE Spring Conference Proceedings, pp.1542-1547, 2012.
출력분기 기반 플러그인 하이브리드 전기자동차의 동력전달 시스템 특성 분석
5) K. Rahman, M. Anwar, S. Schulz, E. Kaiser, P.
Turnbull, S. Gleason, B. Given and M. Grimmer,
“The Voltec 4ET50 Electric Drive System,”
SAE 2011-01-0355, 2011.
6) M. Miller, A. Holmes, B. Conlon and P. Sava- gian, “The GM “Voltec” 4ET50 Multi-mode Electric Transaxle,” SAE 2011-01-0887, 2011.
7) S. Sung, S. Park, J. Choi, S. Noh, D. Kim, C.
Hahn and B. Han, “Teardown Benchmark of GM Volt Plug-in Hybrid EV,” KSAE Spring Conference Proceedings, pp.1766-1766, 2013.
8) D. Kum, X. Zhang, C. Li and H. Peng, “Prius+
and Volt-: Configuration Analysis of Multimode Power-split HEVs,” KSAE Spring Conference
Proceedings, pp.1780-1780, 2013.
9) C. Ma, J. Kang, W. Choi, M. Song, J. Ji and H.
Kim, “A Comparative Study on the Power Cha- racteristics and Control Strategies for Plug-in Hybrid Electric Vehicles,” Int. J. Automotive Technology, Vol.13, No.3, pp.505-516, 2012.
10) H. Yang, B. Kim, Y. Park, W. Lim and S. Cha,
“Analysis of Planetary Gear Hybrid Powertrain System Part 2: Output Split System,” Int. J.
Automotive Technology, Vol.10, No.3, pp.381- 390, 2009.
11) H. Benford and M. Leising, “The Lever Analogy:
A New Tool in Transmission Analysis,” SAE 810102, 1981.