䂼ᲈ㵸〱 㟼⏜℄ Ṑム ↔㌐ ⱤⰬ㫤⽘ ᲈ㻤 ᙽ㖰 㻼⪥ ▗
⪬ᙌ ᖤ⪨⽘ ᚈ㻤 ⽸ᛴ
洛旇滊 ̐ · 牢懗崲
*· 牢壟篎
**· 卆渂笾
***Tolerance Analysis and Design Improvement of a Lens System for Mobile Phone Camera
Sangjin Jung, Byung-Lyul Choi, Dong-Hoon Choi and Ju Ho Kim
Key Words : Lens System Design (⩢㯞Ἒ ㍺Ἒ), Tolerance (Ὃ㹾), Latin Hypercube Sampling (⧒
䕊ỿ㿪㿲⻫), Tolerance Optimization (Ὃ㹾㾲㩗㍺Ἒ) Abstract
A lens system of a camera module for mobile phones is comprised of the composition and design of various shapes of lens. To improve responses such as the modular transfer function (MTF), a lens system should always be constructed by considering uncertainty that can be caused by manufacturing and assembly error. In this study, tolerance optimization using the Latin Hypercube Sampling (LHS) technique is performed.
In order to reduce the computational burden of the tolerance optimization process and decrease the influence from numerical noise effectively, we use the Progressive Quadratic Response Surface Modeling (PQRSM), which is one of Sequential Approximate Optimization (SAO) techniques. Using this method, we achieved optimal tolerance for each lens and obtained reliability for satisfying user’s requirements. In addition, through the design process the manufacturing and assembly cost of a lens system was reduced.
1. 昢 嵦
䦊╖䙆㣿 䃊Ⲫ⧒ ⳾✞㦮 ⩢㯞 㔲㓺䎲㦖 㡂⩂ 䡫
㌗㦮 ⩢㯞 ㍺Ἒ 㫆䞿㦚 䐋䟊 Modular Transfer Function (MTF) ❇㦮 ὧ䞯 䔏㎇䂮✺㧊 ⳿䚲 ㎇⓻㦚
╂㎇䞮☚⪳ ㍺Ἒ♲┺
(1). 㤦䞮⓪ ㎇⓻㠦 ☚╂䞮☚
⪳ ⩢㯞 㔲㓺䎲㦚 ῂ㎇䞮₆ 㥚䟊㍲⓪ ⩢㯞 ㍺Ἒ㧦 㠦Ợ Ⱔ㦖 ἓ䠮ὒ 㩚ⶎ㩗㧎 䟊㍳ ⓻⩻㧊 㣪ῂ♲┺.
⁎⩂⋮, 㧊⯒ 䌫㦒⪲ ⩢㯞 㔲㓺䎲㦚 ㍺Ἒ䞮㡖㦚 㰖⧒☚, 㔺㩲⪲ ㍺Ἒ䞲 ╖⪲ 㩫䢫䞮Ợ 㩲㧧 㫆 Ⱃ㦚 䞮⓪ ộ㦖 ⰺ㤆 㠊⪋┺
(2).
➆⧒㍲, 㩲㧧 㫆Ⱃ 㡺㹾⪲ ㌳䞶 㑮 㧞⓪
䢫㩫㎇ (uncertainty)㠦 㦮䞲 㡗䟻㦚 ἶ⩺䞮㡂 䟃
㌗ 㔲㓺䎲㦚 ῂ㎇䟊㟒 䞮Ⳇ, 㧊⯒ ῂ䡚䞮₆ 㥚䟊
㍲⓪ ṗ ⩢㯞 䛞㠦 ╖䞲 㩗㩞䞲 Ὃ㹾⯒ 䞶╏䟊 㟒 䞲┺. 㧊㢖 ṯ㦖 䛞㦮 Ὃ㹾⓪ ㍺Ἒ䞲 㔲㓺䎲 㦮 ㎇⓻㠦 㡗䟻㦚 㭚 ㈦Ⱒ 㞚┞⧒, 㩲㧧 㫆Ⱃ Ὃ㩫㠦㍲㦮 㩫⹖☚ 㩲㧧 ┾Ṗ ❇㠦 㡗䟻㦚 㭒 Ợ ♲┺.
㧒㩗㦒⪲ Ὃ㹾⧖ 䢫㩫㩗 ⼖㑮 (deterministic variables)Ṗ 㞚┢ 䢫㩫㎇㦚 䙂䞾䞮⓪ 䢫⮶ ⼖㑮 (random variables)⪲㍲ 㔲㓺䎲㦮 㔶⬆㎇ (reliability) 㠦 㡗䟻㦚 ⹎䂲┺. Ὃ㹾 ㍺Ἒ⓪ ㍺Ἒ㧦Ṗ 㤦䞮⓪ 㔶⬆☚ ⻪㥚 㞞㠦㍲ 㩲㧧 ゚㣿㦚 Ṗ⓻䞲 䞲 㾲㏢
䢪 䞮Ệ⋮, ⡦⓪ 㤦䞮⓪ 㩲㧧 ゚㣿 㞞㠦㍲ 㔶⬆㎇
㦚 ⁏╖䢪䞮☚⪳ 䞮⓪ Ὃ㹾⯒ 䞶╏䞮⓪ ộ㧊┺.
㯟, ㍺Ἒ㧦⓪ ⩢㯞 㔲㓺䎲㦮 䢫㩫㎇㦚 ἶ⩺䞲 Ὃ㹾 䟊㍳㦚 䌫㦒⪲ 㩗㩞䧞 Ὃ㹾⯒ 䞶╏䟊㟒 䞲
┺.
̐ 䣢㤦,
䞲㟧╖䞯ᾦ ╖䞯㤦 ₆ἚὋ䞯ὒ E-mail : [email protected]TEL : (02)2220-0443 FAX : (02)2291-4070
* ൽ
FRAMAX**
䞲㟧╖䞯ᾦ ₆ἚὋ䞯*** ൽ
㌒㎇㩚₆ 㭧㞯㡆ῂ㏢ CAE Group 대한기계학회 2008년도 추계학술대회 논문집Ὃ㹾 䟊㍳㦚 㥚䟊 ₆㫊㠦⓪ ╖䚲㩗 ὧ䞯 䟊㍳
䝚⪲⁎⧾㧎 Code-V ⌊㠦 䌧㨂♲ TOR, TOLFDIF, TOLMONTE ❇㦮 Ὃ㹾 䟊㍳ 㞢ἶⰂ㯮㧊 㭒⪲ 㧊 㣿♮㠞㦒⋮, 㩫䢫㎇㧊⋮ 䣾㥾㎇㧊 ⟾㠊㰖ἶ ₆⓻ 㠦 㩲䞲㧊 㧞⓪ ộ㦒⪲ 㞢⩺㪎 㧞┺
(3).
➆⧒㍲, ⽎ 㡆ῂ㠦㍲⓪ ⩢㯞 㔲㓺䎲㦮 䢫㩫㎇
㦚 ἶ⩺䞲 䢫⮶㩗 ⳾◎㠦 ╖䞮㡂 ⽊┺ 㩫䢫䞮Ⳋ㍲
䣾㥾㩗㧎 Ὃ㹾 䟊㍳㦚 䐋䟊, ㍺Ἒ㧦Ṗ 㤦䞮⓪ ㎇
⓻㦚 㾲╖䞲 Ⱒ㫇䞮Ⳋ㍲ Ṗ⓻䞲 䞲 䄺┺⧖ Ὃ㹾⯒
䞶╏䞮☚⪳ 䞮⓪ Ὃ㹾 ㍺Ἒ ⻫㦚 㩲㔲䞮ἶ㧦 䞲
┺.
ٻ
2. 簺堆磶殯 獺彚岂 微姎汞 崒溎 柢枪癢
⽎ 㡆ῂ㠦㍲ ㌂㣿䞲 䦊╖䙆㣿 䃊Ⲫ⧒ ⳾✞㦮 ⩢ 㯞 㔲㓺䎲㧎 3M lens module 㦮 3D 䡫㌗㦖 Fig. 1 ὒ ṯ┺. 㧊 ⩢㯞 㔲㓺䎲㦖 4 Ṳ㦮 ⩢㯞, IR filter, sensor Ṗ ⺆⩊㠦 㫆Ⱃ♲ ῂ㫆⪲ 㧊⬾㠊㪎 㧞┺.
⩢㯞 㔲㓺䎲㦚 ῂ㎇䞮₆ 㥚䟊㍲⓪ ⩢㯞 ṖὋ, 㫆 Ⱃ 㔲 Ⱔ㦖 㡺㹾Ṗ 㫊㨂䞮Ⳇ 㧊⓪ 䃊Ⲫ⧒㦮 ㎇⓻ 㩖䞮⪲ 㧊㠊㰚┺. ➆⧒㍲, 㧒㩫 㑮㭖㦮 㡺㹾⯒ ἶ
⩺䞲 Ὃ㹾Ṗ 㔲㓺䎲㠦 㫊㨂䞮⓪◆, ₆㫊 ㎇⓻㦚 㥶㰖 䞮Ⳋ㍲ 㧊 Ὃ㹾⯒ 㠒ⰞⰢ䋒 䠞㣿䞮⓪ ộ㧊 Ṗ⓻䞲㰖 䕢㞛䞶 㑮 㧞㠊㟒 䞲┺.
2.1 崒溎 柢枪癢汞 击焮
㧒㩗㦒⪲ ⩢㯞⯒ ṖὋ䞮ἶ 㧊⯒ 㫆Ⱃ䞮㡂 㩚 㼊㩗㧎 ⩢㯞 㔲㓺䎲㦚 ῂ㎇䞾㠦 㧞㠊㍲ Ⱔ㦖 Ὃ㹾
⯒ ἶ⩺䟊㟒 䞲┺. ⽎ 㡆ῂ㠦㍲ ㌂㣿䞲 ⩢㯞 㔲㓺 䎲㦮 ἓ㤆㠦☚ 㫆Ⱃ, ṖὋ 㔲 䞚㑮㩗㦒⪲ ἶ⩺䟊 㟒 䞮⓪ 㡂⩂ Ὃ㹾✺㧊 㫊㨂䞮Ⳇ Table 1 㠦 㧊⯒
㩫Ⰲ䞮㡖┺.
Fig. 1 3D shape of 3M lens module
Table 1 㠦㍲ L1, L2, L3, L4 ⓪ ṗṗ 㼁 ⻞㱎䎆
⍺ ⻞㱎₢㰖㦮 ⩢㯞⯒ ⋮䌖⌊Ⳇ, ⁎ 㡜㠦 䚲₆♲
a, b ⓪ ṗṗ ⩢㯞㦮 㞴, ✍Ⳋ (surface)㦚 Ⱖ䞲┺.
Image ⓪ ㌗㦚 㧎㔳䞮⓪ sensor Ⳋ㦚 ⋮䌖⌎┺. ⩢ 㯞 㔲㓺䎲 ㎇⓻㠦 ⹒Ṧ䞲 㡗䟻㦚 ⹎䂮⓪ 㧛⩻ ⼖ 㑮⪲⓪ ṗ ⩢㯞㦮 ⚦℮, ❪㎒䎆, 䕎䔎Ṗ 㧞㦒Ⳇ, 㧊 ⼖㑮✺㠦 ὖ⩾♲ Ὃ㹾㦮 Ṳ㑮⓪ Table 1 㠦㍲
⽒ 㑮 㧞❅㧊 㽳 33 Ṳ㧊┺. 㧊 ⼖㑮✺㦖 䢫⮶䙂 䡫䌲⪲㍲ Ὃ㹾 䟊㍳㦚 㥚䞲 㧛⩻㧊 ♮⓪◆, 㧊➢
ṗ ⼖㑮㠦 ╖䞲 䙂㦮 䚲㭖䘎㹾⯒ Ὃ㹾 ⻪㥚⪲㖾
⋮䌖⌒ 㑮 㧞┺. ⪲ 㧊 Ὃ㹾 ⻪㥚⯒ Ὃ㹾 䟊㍳
㍺Ἒ ❇㦚 㥚䞲 㧛⩻ 㧎㧦⪲㖾 㩲㠊䞮Ợ ♲┺.
2.2 崒溎 柢枪癢汞 犢崫 汾沖
33 Ṳ㦮 㧛⩻ Ὃ㹾✺㦚 䐋䟊 䟊㍳㦚 㑮䟟䞮㡂 ὖ㕂 㧞⓪ 㿲⩻ Ṩ㦚 ⚦ Ṗ㰖 㠑Ợ ♲┺. Ⲓ㩖 㼁
⻞㱎 㿲⩻ 㧎㧦㧎 R
1㦖 Fig. 2 㦮 ⍺ 㦮 0.75 field 㭧㠦㍲ MTF Ṗ Ṗ㧻 䋆 Ṩὒ Ṗ㧻 㧧㦖 Ṩ 㦮 㹾㧊⯒ ⋮䌖⌊Ⳇ, ⚦ ⻞㱎 㿲⩻ 㧎㧦㧎 R
2⓪
⍺ 㦮 0.75 field 㭧㠦㍲ MTF Ṗ Ṗ㧻 㧧㦖 Ṩ 㧊┺. 0.75 field 㠦㍲ 㠑㠊㰖⓪ ṗṗ㦮 MTF Ṩ✺㦖 Ṗ⪲㿫 䟻 MTF 㢖 ㎎⪲㿫 䟻 MTF 㦮 䘟‶Ṩ 㧊┺.
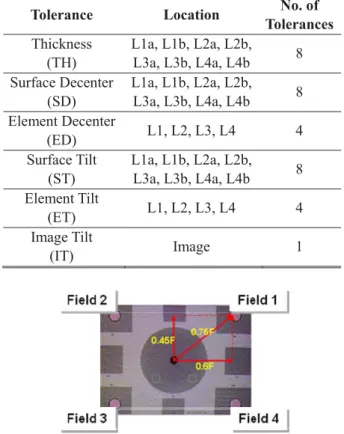
Table 1 Tolerances of a lens system
Tolerance Location No. of Tolerances Thickness
(TH)
L1a, L1b, L2a, L2b, L3a, L3b, L4a, L4b 8 Surface Decenter
(SD)
L1a, L1b, L2a, L2b, L3a, L3b, L4a, L4b 8 Element Decenter
(ED) L1, L2, L3, L4 4 Surface Tilt
(ST)
L1a, L1b, L2a, L2b, L3a, L3b, L4a, L4b 8 Element Tilt
(ET) L1, L2, L3, L4 4 Image Tilt
(IT) Image 1
Fig. 2 0.75 field of a lens system
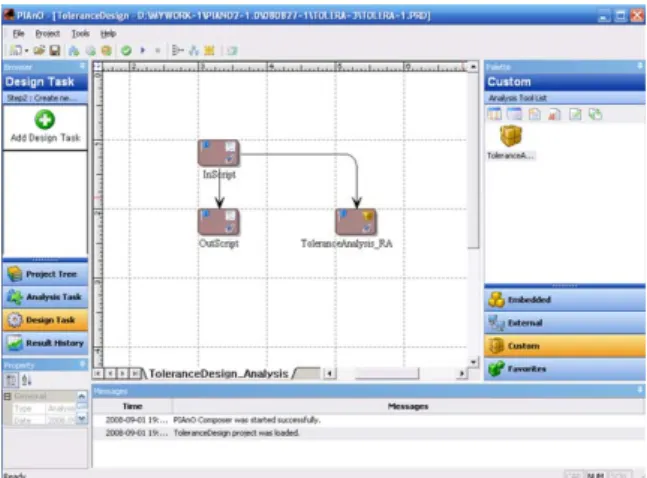
Fig. 3 Process Integration using PIAnO 2.0
3. Process Integration
㧛㿲⩻ 㧎㧦Ṗ 㩫㦮♲ ⩢㯞 㔲㓺䎲㠦 ╖䞲 䟊㍳
㍺Ἒ⯒ 㥚䟊 ⽎ 㡆ῂ㠦㍲⓪ 2 Ṗ㰖 䝚⪲⁎⧾㦚 㧊㣿䞮㡖┺. Ⲓ㩖, ⩢㯞 㔲㓺䎲㦮 䅊䜾䎆 㔲⸂⩞㧊
㎮㦚 㥚䟊 ㌗㣿 ⩢㯞 䟊㍳ 䝚⪲⁎⧾㧎 Code-V ⯒ 㧊㣿䞮㡖┺. ⁎Ⰲἶ, ㌗㣿 PIDO (Process Integration and Design Optimization) Tool 㧎 PIAnO 2.0 㦚 㧊㣿 䞮㡂 Code-V ⯒ 䐋䟊 ⳾◎Ⱇ♲ ⩢㯞 㔲㓺䎲㦮 Ὃ 㹾 䟊㍳ ㍺Ἒ⯒ 㑮䟟䞮ἶ㧦 䞮㡖┺.
Ὃ㹾 䟊㍳ ㍺Ἒ⯒ 㥚䟊㍲⓪ Code-V ⯒ 㧊㣿 䞲 ⩢㯞 㔲㓺䎲㦮 䟊㍳㧊 PIAnO ㌗㠦㍲ 㧊⬾㠊㪎 㟒 䞲┺. ➆⧒㍲, PIAnO ⯒ 㧊㣿䞮㡂 ⩢㯞 㔲㓺䎲 䟊㍳ ⳾◎㦮 㧛⩻, 䟊㍳, 㿲⩻㦚 ㌂㣿㧦Ṗ PIAnO
㌗㠦㍲ 㩲㠊䞶 㑮 㧞☚⪳ ῂ㎇䞮㡖ἶ, Fig. 3 ὒ ṯ 㧊 Process Integration 㦚 䐋䟊 㡂⩂ 䟊㍳ 䅊䙂⍢䔎
㌂㧊㦮 data flow ⯒ ㍺㩫䞮㡖┺.
4. LHS 庂 決殯穢 Screening
4.1 Latin Hypercube Sampling
⽎ 㡆ῂ㠦㍲⓪ 33 Ṳ㦮 Ὃ㹾㠦 ╖䟊 䟊㍳ ⳾◎
㦮 㿲⩻ 㧎㧦㠦 ὖ䞲 reliability ⯒ 䕢㞛䞮₆ 㥚䟊
⧒䕊ỿ㿪㿲⻫ (Latin Hypercube Sampling; LHS)
(4)㦚 㧊㣿䞮㡖┺. 㧒㩗㦒⪲ Ὃ㹾 䟊㍳㦚 㑮䟟䞮₆ 㥚䞲 ⻫㦒⪲ ⴂ䎢䃊⯒⪲ 㔲⸂⩞㧊㎮(Monte Carlo Simulation; MCS)㧊 Ṗ㧻 ⍦Ⰲ ㌂㣿♮ἶ 㧞㰖Ⱒ, 㩫䢫䞲 reliability ⯒ 㠑₆ 㥚䟊㍲ Ⱔ㦖 ㌮䝢 ㌂㧊 㯞⯒ 㣪ῂ䞮₆ ➢ⶎ㠦 ゚䣾㥾㩗㧎 ⻫㦒⪲ 㞢⩺
㪎 㧞┺.
㧊㠦 䟊 LHS ⓪ Fig. 4 㢖 ṯ㧊 㭒㠊㰚 ㌮䝢
㌂㧊㯞 ⌊㠦㍲ ㆧ䧞⓪ 㩦✺ ㌂㧊㦮 ỆⰂ⯒ 㾲╖䢪 䞮Ⳋ㍲, ṗ 㧛⩻ ⼖㑮㦮 䙂 䡫䌲⯒ 㧮 ἶ⩺䞮㡂
Fig. 4 MCS and LHS
Ṗ㧻 㾲㩗䢪♲ ㌗䌲⪲ 㩦✺㦚 ⺆䂮㔲䋾┺. ➆⧒㍲, MCS 㠦 ゚䟊 䤾㞂 㩗㦖 ㌮䝢 ㌂㧊㯞⯒ Ṗ㰖ἶ☚
㩫䢫䞲 ἆὒ⯒ 㠑㦚 㑮 㧞㦒Ⳇ, Ὃ㹾 䟊㍳ 㔲Ṛ
⡦䞲 䡚㩖䧞 㭚㠊✲⓪ 㧻㩦㧊 㧞┺. ⽎ 㡆ῂ㠦㍲
⓪ LHS ⯒ 㧊㣿䞲 䣾㥾㩗㧎 Ὃ㹾 䟊㍳㦚 䐋䟊 ⩢ 㯞 㔲㓺䎲㦮 㭒㣪 ㍺Ἒ⼖㑮 ㍶㩫 Ὃ㹾㾲㩗㍺Ἒ
⯒ 㑮䟟䞮ἶ㧦 䞲┺.
4.2 1-D Parametric Study
㞴㠦㍲ 㩫㦮䞲 33 Ṳ㦮 Ὃ㹾✺㦖 Ὃ㹾 䟊㍳
㍺Ἒ⯒ 㑮䟟䞶 ➢ 㧛⩻ ⼖㑮⪲ 㧊㣿♲┺. ⁎⩂⋮, 䕢⩞䏶 㤦Ⰲ㠦 㦮䞮㡂 㧊 㭧㠦㍲ 㧒 Ὃ㹾Ⱒ㧊 㩚㼊 㔲㓺䎲㠦 㭒⪲ 㡗䟻㦚 ⹎䂶 㑮 㧞┺.
➆⧒㍲, Ὃ㹾✺㦮 㭒䣾ὒ (main effect)⯒ 㞢㞚⽊
₆ 㥚䟊 ṗ Ὃ㹾㦮 ⻪㥚⯒ 0.5 ⺆䎆 2 ⺆₢㰖 ⓮
⩺ṖⳊ㍲ 㔲㓺䎲㦮 reliability Ṗ 㠊⠑Ợ ⼖䞮⓪㰖
㌊䘊⽊㞮┺. 㧊㻮⩒ ┺⯎ 㧛⩻ ⼖㑮✺㦖 ἶ㩫㔲䋾
㌗䌲㠦㍲ 䞮⋮㦮 㧛⩻ ⼖㑮 ⼖䢪㠦 ╖䞲 㿲⩻ ⼖ 㑮㦮 ἓ䟻㦚 䕢㞛䞮⓪ ⻫㦚 1-D Parametric Study (1-D PS) ⧒ἶ 䞲┺. R
1 R
2㠦 ╖䞲 ⩢㯞 㔲㓺䎲 㦮 reliability ⓪ ṗṗ 㔳 (1), (2)⪲ 㩫㦮䞶 㑮 㧞㦒 Ⳇ 㧊⯒ 㑮㥾㧊⧒ἶ 䚲䡚䞮₆☚ 䞲┺.
( )
1
P
10.15
g = R ≤ (1)
( )
2
P
20.41
g = R ≥ (2)
Fig. 5 1-D Parametric Study of image tilt
Table 2 Sensitivity indices for g
1Tolerance Location Percentage (%) Element Decenter L3 19.2
Surface Decenter L3b 15.9 Element Decenter L1 15.4
Thickness L4a 14.8 Element Tilt L1 9.3
Image Tilt Image 7.1
Thickness L3a 5.5 Thickness L2b 3.8 Surface Decenter L1b 2.7
Etc. - 6.3
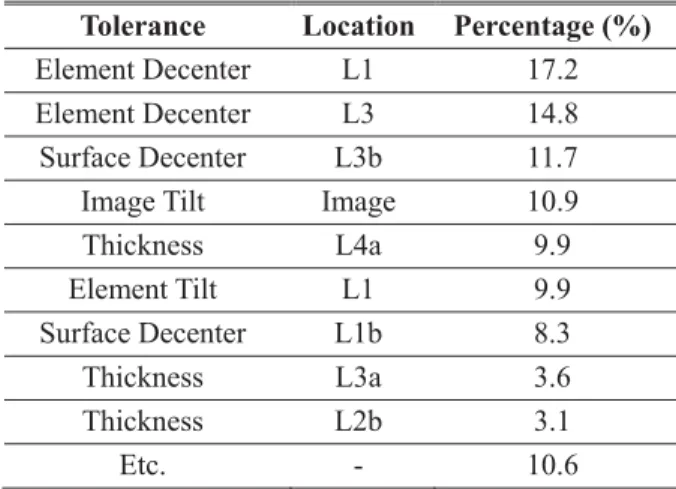
Table 3 Sensitivity indices for g
2Tolerance Location Percentage (%) Element Decenter L1 17.2
Element Decenter L3 14.8 Surface Decenter L3b 11.7 Image Tilt Image 10.9
Thickness L4a 9.9 Element Tilt L1 9.9
Surface Decenter L1b 8.3
Thickness L3a 3.6 Thickness L2b 3.1
Etc. - 10.6
㡞⯒ ✺㠊 Fig. 5 㢖 ṯ㧊 image tilt 㦮 㽞₆ Ὃ㹾 Ṗ 0.3 㧊⧒ἶ 䞶 ➢, 㽞₆ Ὃ㹾㦮 0.5 ⺆, 1 ⺆, 1.5
⺆, 2 ⺆㠦 ╖䟊㍲ ṗṗ LHS ⯒ 㧊㣿䞮㡂 R
1㠦 ╖ 䞲 ⩢㯞 㔲㓺䎲㦮 reliability ⯒ 㠑ἶ ⁎ ⼖䢪⯒ 䕢 㞛䞶 㑮 㧞┺. ⁎Ⰲἶ, reliability 㦮 㾲╖ ⼖䢪⨟
D
IT⯒ 㠑㠞┺. 㧊㢖 ṯ㦖 ⻫㦚 䐋䟊 33 Ṳ㦮 ⳾
✶ Ὃ㹾㠦 ╖䞲 㭒䣾ὒ⯒ 䕢㞛䞮㡖┺.
㧊㩲 㞴㠦㍲ 㠑㦖 ṗṗ㦮 Ὃ㹾㠦 ╖䞲 㭒䣾ὒ㦮 䋂₆ ゚ᾦ⯒ 䐋䟊 㔲㓺䎲㠦 ⹒Ṧ䞲 㡗䟻㦚 ⹎䂮⓪ 㭒㣪 Ὃ㹾⯒ 䕢㞛䞮ἶ㧦 䞲┺. ┺㦢ὒ ṯ㦖 ┺㎅
┾Ἒ⯒ 䐋䟊 33 Ṳ㦮 Ὃ㹾㠦 ╖䞲 㭧㣪☚⯒ 㠑㦚 㑮 㧞┺.
Step 1: k ⻞㱎 Ὃ㹾㠦 ╖䟊㍲ PS ⯒ 㑮䟟 Step 2: Reliability 㦮 㾲╖ ⼖䢪⨟ D
k⯒ Ἒ㌆
Step 3: 33 Ṳ㦮 Ὃ㹾㠦 ╖䟊㍲ Step 1, 2 ⯒ ⽋
Step 4: D
1, …, D
33㦮 㩚㼊 䞿㧎 D
total㦚 Ἒ㌆
Step 5: D
1, …, D
33㧊 ṗṗ D
total㠦㍲ 㹾㰖䞮⓪
゚㭧㦚 Ἒ㌆
㧊㢖 ṯ㦖 ὒ㩫㦚 Ệ㼦 㠑㦖 ἆὒ⓪ Table 2 3 ὒ ṯ┺. 33 Ṳ㦮 Ὃ㹾 㭧㠦㍲ 㩚㼊 㔲㓺䎲㠦 㟓 90% 㧊㌗㦮 㡗䟻㦚 ⹎䂮⓪ Ὃ㹾⯒ 㑲㍲╖⪲ ⋮㡊 䞲 ộ㧊┺. Table 2 㢖 3 㠦㍲ ⽒ 㑮 㧞❅㧊 ṗṗ 㭒 㣪 Ὃ㹾Ṗ 9 Ṳ㝿 ㍶㩫♮㠞⓪◆ Ὃ㹾㦮 㑲㍲Ṗ ┺
⯒ ㈦ ☯㧒䞲 Ὃ㹾Ṗ ㍶㩫♮㠞㦢㦚 㞢 㑮 㧞┺.
➆⧒㍲, ㍶㩫♲ 9 Ṳ㦮 㭒㣪 Ὃ㹾Ṗ g
1 g
2㠦 ╖ 䞲 reliability 㠦 ⹒Ṧ䞲 㡗䟻㦚 ⹎䂮⓪ ộ㦚 㞢 㑮 㧞┺. Table 2 㢖 3 㦮 Ⱎ㰖Ⱏ 㠦 Etc.⪲ 䚲㔲♲
㦖 ㍶㩫♮㰖 ⴑ䞲 ⋮Ⲏ㰖 24 Ṳ㦮 Ὃ㹾⯒ ⋮ 䌖⌎ ộ㧊┺. 㾲㫛㩗㦒⪲ ㍶䌳♲ 9 Ṳ㦮 Ὃ㹾⯒ 㩫 Ⰲ䞮Ⳋ 㞚⧮㢖 ṯ┺.
࡞ Thickness ὖ⩾: L2b, L3a, L4a
࡞ Decenter ὖ⩾: L1b, L3b, L1, L3
࡞ Tilt ὖ⩾: L1, image
㰖⁞₢㰖 LHS ⯒ 㧊㣿䞲 PS ⯒ 䐋䟊 33 Ṳ㦮 Ὃ 㹾 㭧㠦㍲ 㾲㫛㩗㦒⪲ 9 Ṳ㦮 㭒㣪 Ὃ㹾⯒ ㍶㩫䞮 㡖┺. 㧊 Ὃ㹾✺㦖 㞴㦒⪲ Ὃ㹾㾲㩗㍺Ἒ⯒ 㥚䞲
㍺Ἒ⼖㑮⪲㖾 䢲㣿♲┺.
4.3 击焮汞ࣜ欇窫壊ࣜ把昣ࣜ
⽎ 㩞㠦㍲⓪ PS ⯒ 㧊㣿䞲 screening ⻫㦚 䐋䟊
㍶䌳♮㰖 ⴑ䞲 ⋮Ⲏ㰖 24 Ṳ㦮 Ὃ㹾Ṗ ὒ㡆 㩚㼊 㔲㓺䎲㠦 㠊⟶䞲 㡗䟻㦚 ⹎䂮⓪㰖 㞢㞚⽊ἶ㧦 䞲
┺. 24 Ṳ Ὃ㹾㦮 ⼖䢪㠦 ╖䟊㍲ 㔳 (1), (2), (3)㧊 㠊⟶䞲 ⼖䢪⯒ ⽊㧊⓪㰖 䕢㞛䞮Ⳋ, Ὃ㹾㾲㩗㍺Ἒ 㔲㠦 ⋮Ⲏ㰖 Ὃ㹾㦮 䋂₆⯒ 㠊⠑Ợ ㍺㩫䞶 㑮 㧞 㦚㰖 ἆ㩫䞶 㑮 㧞┺.
( )
6
2
1 1
N
jij
j ij
j i
ij ij
Cost t a c
X b
= =
§ § · ·
¨ ¨ ¸ ¸
= ⋅ +
¨ ¨ © ∆ + ¸ ¹ ¸
© ¹
¦ ¦ (3)
where j = 1, …, 6 (TH, SD, ST, ED, ET, IT) N
j: Ὃ㹾 㥶䡫⼚㦮 Ṳ㑮
t
j: Ὃ㹾 㥶䡫⼚㦮 Ṗ㭧䂮 a
ij: Ṳ⼚ Ὃ㹾㦮 Ṗ㭧䂮
㔳 (3)㦖 cost function 㦒⪲㍲ 㞴㦒⪲ Ὃ㹾㾲㩗㍺
Ἒ⯒ 㑮䟟䞶 ➢ 㾲㏢䢪䞮ἶ㧦 䞮⓪ ⳿㩗䞾㑮⪲☚
㧊㣿♲┺. 㔳 (3)㦮 Ἒ㑮㧎 N
j, a
ij, b
ij, c
ij, t
j⓪ ṗṗ Table 4 㠦 㩫Ⰲ♮㠊 㧞㦒Ⳇ, ┺㟧䞲 Ἒ㑮⯒ ⚦㠞₆
➢ⶎ㠦 ⩢㯞 㔲㓺䎲㦮 䔏㎇㠦 ➆⧒㍲ ㌂㣿㧦Ṗ 㤦 䞮⓪ 䡫䌲⪲ cost function 㦚 㩫㦮䞮⓪ ộ㧊 Ṗ⓻䞮
┺.
Table 4 Coefficients of cost function
Tolerance N
jt
ja
ijb
ijc
ijTH ( j=1) 8 1.0 18.26 1.89 0.32 SD ( j=2) 8 1.0 18.26 1.89 0.32 ST ( j=3) 8 1.0 18.26 1.89 0.32 ED ( j=4) 4 1.0 18.26 1.89 0.32 ET ( j=5) 4 1.0 18.26 1.89 0.32 IT ( j=6) 1 1.0 292.20 30.19 0.32
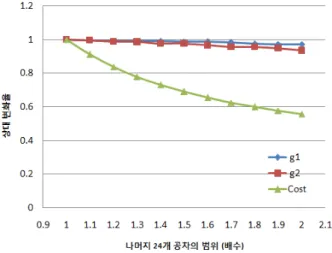
24 Ṳ㦮 ⋮Ⲏ㰖 Ὃ㹾Ṗ 㰗㩧㩗㦒⪲ reliability 㢖 cost function 㠦 ⹎䂮⓪ 㡗䟻㦚 ㌊䘊⽊₆ 㥚䟊, 24 Ṳ㦮 Ὃ㹾⻪㥚⯒ 㽞₆Ṩ㦮 1 ⺆䎆 2 ⺆ (Ὃ㹾㦮
㌗䞲)₢㰖 㽞₆ Ὃ㹾㦮 10%㝿 㯳Ṗ㔲䅲 ṖⳊ㍲
Ὃ㹾 䟊㍳㦚 㑮䟟䞮㡖┺. 9 Ṳ㦮 㭒㣪 ㍺Ἒ⼖㑮 Ṩ 㦖 㽞₆ Ὃ㹾 Ṩ㦒⪲ ἶ㩫䞮㡖┺.
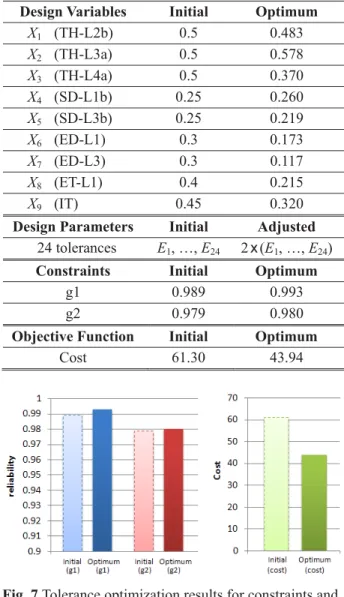
㧊㢖 ṯ㧊 PS ⯒ 㑮䟟䞲 ἆὒṖ Fig. 6 㠦 ⋮䌖⋮
㧞┺. ἆὒ ⁎⧮䝚㦮 y 㿫 㓺䅖㧒㦖 g
1, g
2, cost function ṗṗ㦮 㾲╖Ṩ㦚 1 ⪲ ⽊㞮㦚 ➢㦮 ㌗╖
⼖䢪㥾㧊┺. ἆὒ㠦㍲ ⽒ 㑮 㧞❅㧊 ⋮Ⲏ㰖 24 Ṳ 㦮 Ὃ㹾⯒ 2 ⺆₢㰖 㯳Ṗ㔲䆆㦚 ἓ㤆, 㑮㥾㦮 ⼖䢪
⓪ ⹎⹎䞲 Ⳋ cost ⓪ 㟓 50%₢㰖 Ṧ㏢䞮⓪ ἓ 䟻㦚 ⽊㡖┺. ┺㔲 Ⱖ䞮Ⳋ, ⋮Ⲏ㰖 24 Ṳ㦮 Ὃ㹾⓪ 㧒㩫 㑮㭖₢㰖 㯳Ṗ㔲䋺▪⧒☚ ⩢㯞 㔲㓺䎲㦮 reliability 㠦⓪ 䋆 㡗䟻㦚 ⹎䂮㰖 ⴑ䞮ἶ, 㩚㼊 Ὃ 㹾㦮 㟓 3/4 㠦 䟊╏䞮⓪ 24 Ṳ㦮 Ὃ㹾Ṗ 䄺㰦㦒⪲
㧎䟊 cost 㦮 䋆 Ṧ㏢Ṗ ㌳䞲 ộ㧊┺.
┺㦢 㩞㠦㍲⓪ ⋮Ⲏ㰖 24 Ṳ㦮 Ὃ㹾⓪ 㽞₆ Ὃ 㹾㠦 ゚䟊 䋆 Ṩ㦒⪲ ἶ㩫㔲䋺ἶ, 㭒㣪 Ὃ㹾 9 Ṳ
⯒ ㍺Ἒ⼖㑮⪲ ㍺㩫䞲 䤚 Ὃ㹾㾲㩗㍺Ἒ⯒ 㑮䟟䞮 㡂, ⏨㦖 㑮㥾㦚 㥶㰖䞮Ⳋ㍲ cost ⓪ Ṧ㏢㔲䋺⓪ 㾲㩗㦮 Ὃ㹾 䞶╏⨟㦚 ☚㿲䟊 ⽊ἶ㧦 䞲┺.
Fig. 6 Parametric Study for the rest tolerances
5. 击焮牢洇昪凊
5.1 昪凊怾洢 洛柣筚
Ὃ㹾㾲㩗㍺Ἒ⯒ 㑮䟟䞮₆ 㥚䞲 ㍺Ἒⶎ㩲 㩫㔳䢪
⓪ 㔳 (4)㢖 ṯ┺. 4 㩞㠦㍲ 㠑㦖 ἆὒ㠦 ➆⧒ 㔳 (4)㦮 ㍺Ἒ⼖㑮㦮 Ṳ㑮⓪ 㽳 9 Ṳ㧊ἶ, Table 2 㢖 3 㠦㍲ Etc.⯒ 㩲㣎䞲 Ὃ㹾✺㧊┺.
( )
( )
( )
1 2