論文
통합 해석 및 설계 최적화 기술을 이용한 무인기 성능 향상 연구
김지민*, 누엔 반*, 서정일*, 티안 막심*, 이재우*, 김상호*
UAV Performance Improvement Using Integrated Analysis and Design Optimization Technology
Jimin Kim*, Nguyen Nhu Van*, Jung-il Shu*, Tyan Maxim* Jae-woo Lee* and Sangho Kim*
ABSTRACT
This paper describes the design optimization of Unmanned Aerial Vehicles(UAVs). An optimization framework has been developed and implemented for the conceptual design of UAVs. An integrated design analysis program was developed with several analysis modules such as propulsion, performance, mission, weight, and stability and control. A UAV configuration design optimization was performed by implementing the integrated analysis to enhance the endurance of UAVs. A SQP optimizer was utilized to build an optimization module for this program and sensitivity analysis was performed to determine the trends of shape variables for developing optimization objective.
In conclusion, the results indicate that the resulting optimized UAVs configurations show performance improvements over the baseline design and reliable analysis results.
Key Words : Unmanned Aerial Vehicles(무인 항공기), Integrated Analysis Program(통합 해석 프로그램), Design Optimization(설계 최적화), Endurance(체공 성능), Sequential Quadratic Programming(SQP)
2013년 01월 07일 접수 ~ 2013년 03월 15일 심사완료 논문심사일 (2012.01.11, 1차), (2013.03.13, 2차)
* 건국대학교 항공우주정보시스템공학과 연락저자, E-mail : [email protected]
서울시 광진구 화양동 1번지
1. 서 론
최근 무인항공기는 스스로 목표물을 탐지하고 식별해 공격여부를 판단할 수 있도록 군사용으로 개발 되는 것 이외 국경에서의 밀입국 감시, 해 안지역 밀수 감시, 산악지형에서의 화재 감시 및 조난자 수색 등의 민수용 목적으로도 개발되고 있다. 일본 후쿠시마 원전의 방사능 유출을 측정 하기 위해 미국의 글로벌 호크가 투입된 사례에 서 볼 수 있듯이 무인 항공기는 재난과 재해에
대피하는 수단으로도 성장하고 있으며, 고고도에 서 장기 체공하며 위성을 대체하는 통신 중계용 으로, 고령화 되어 가고 있는 사회에 부족한 노 동력을 대체할 좋은 대안으로도 성장 중이다.[1]
또한 태양광이나 전기등의 동력원을 사용하여 녹 색환경 실현에도 앞장서고 있다.
현재까지 무인항공기에 대한 연구는 무인기 기 체 설계에 관한 연구보다, 조종사가 없음으로 인 해 요구되는 원격 조종 및 제어 기술을 향상시키 기 위해 주로 항공 전자 및 제어분야에 집중되어 왔다. 하지만 무인항공기는 운용 목적에 따라 형 상 및 가격에 큰 변동이 발생하기 때문에 서로 다른 크기, 성능, 요구조건, 운용목적 등을 만족 시키면서 중량을 최소할 수 있는 무인항공기 설 계 연구가 필요하다.
http://dx.doi.org/10.12985/ksaa.2013.21.1.030
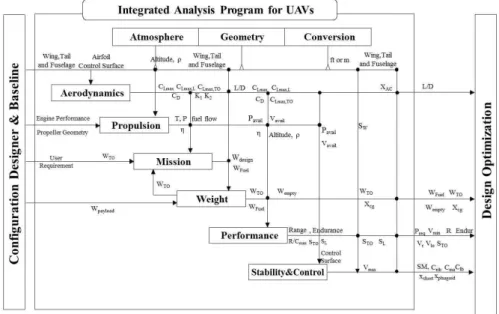
Fig 2. 무인항공기 통합 해석 및 최적화 프로그램의 Data Flow 항공기의 개념설계 단계에서는 빠른 해석 결과
를 도출하기 위해 경험식 기반의 low-fidelity 해 석을 수행하기 때문에 해석 결과의 정확도가 낮 은 단점이 있다. 또한 일반적으로 사용하는 RDS[2], General Aviation Synthesis Program (GASP)[3], Aircraft Synthesis(ACSYNT)[4]등의 설계 통합 프로그램들은 대부분 민항기 또는 전 투기 등 전형적인 고정익 항공기에 대한 프로그 램들이다. 따라서 무인항공기의 개념설계 단계에 서는 설계 결과의 정확도가 낮다는 문제와 전형 적인 프로그램들의 적용 가능성이 불확실하다는 문제가 발생한다. 기존의 고정익 항공기 설계 프 로그램들이 모든 해석 분야가 통합되어져 구성되 어 있기 때문에 필요한 부분만을 적용할 수 없다 는데 제한사항이 있으므로 고정익 항공기에 적용 하는 해석방법을 사용하되 무인항공기에 적용 가 능한 설계 및 해석 도구들을 모듈화하여 개발하 여야 한다.
해석 도구들을 모듈화 한다면, 설계 통합을 해 야할 경우에는 원하는 모듈을 선택하여 통합 프 로그램을 구성할 수 있고, 한 분야만의 해석결과 를 원하는 경우에는 원하는 모듈만을 이용하여 해석을 수행할 수 있기 때문에 프로그램 자체도 가벼워지고 사용자 역시 이용함에 있어 편하다는 장점이 발생한다.[5]
따라서 본 논문에서는 무인항공기 해석 도구를 모듈화하여 개발하고 이를 통합하여 해석할 수 있는 무인항공기 통합 해석 프로그램을 개발하였
다. 또한 최적설계 기법을 적용한 최적화 모듈을 추가하여 향상된 공력 성능과 정확도를 갖는 결 과를 도출할 수 있도록 하였다.
2. 본 론
2.1 무인항공기 통합해석 프로그램 2.1.1 무인항공기 통합해석 프로그램 전체구성
본 연구에서는 초기 사이징 단계를 거쳐 도출 된 설계 파라미터와 주익과 미익의 형상데이터들 을 이용하여 각 해석도구에서 해석을 수행하는 무인항공기 통합해석 프로그램을 개발하였다.
이미 개발되어 있는 유인항공기 해석 프로그램 [6]을 토대로 무인항공기의 특성을 반영한 무인 항공기 통합해석 프로그램의 각 해석도구들은 아 래 그림 1과 같이 모듈화 되어있다. 해석 도구들 의 구성이나 데이터의 흐름은 사용자가 원하는 형태로 변경할 수 있다.
처음으로는 공력해석을 수행하여 각 해석도구 에서 필요로 하는 결과를 도출한다. 중량추정을 제외한 전 해석에서 양, 항력 계수 등 공력해석 의 결과를 요구하기 때문에 가장 먼저 수행되도 록 한다.
공력해석을 수행한 다음에는 추진해석을 수행 한다. 초기 사이징 단계에서 도출된 static-thrust (or power)와 비연료 소모율(Thrust Specific Fuel Consumption, 이하 TSFC)을 이용하여 속도
에 따른 실추력, 파워, 그리고 비연료 소모율을 도출하도록 한다.
추진 해석을 수행한 후에는 이전단계에서 해석 한 결과들을 바탕으로 임무해석과 중량 추정을 수행한다.
임무 해석 단계에서는 초기 사이징 단계에서 추정한 이륙중량과 공력 및 추진 해석 결과를 이 용하여 주어진 임무를 수행하는데 소모되는 연료 중량과 최대 이륙중량을 재산출한다. 이렇게 재 산출된 결과를 항공기의 형상 데이터와 함게 중 량추정의 입력 값으로 하여 항공기의 중량해석 및 무게중심을 도출하도록 한다.
공력해석 단계부터 중량추정 단계까지를 거쳐 도출된 데이터들을 이용하여 안정성 해석과 성능 해석을 수행한다. 각 해석 결과를 이용하여 설계 한 항공기의 안정성과 전체 성능에 대하여 판단 할 수 있다. 이 외에도 공력해석 결과들을 이용 하여 양항비, 양항곡선 등을 도출하여 항공기의 공력 특성에 대한 결과 또한 얻을 수 있도록 한 다.
2.1.2 공력해석 및 조종안정성 해석 모듈 해석 모듈 중에서 가장 중요한 것이 각 세부 모 듈(추진, 성능 ,임무 해석) 위한 양력, 항력계수를 계산하는 공력 해석 모듈이다. 공력 해석 모듈은 비행 전 구간에서 다룰 수 있도록, 항력과 양력 에 관한 2개의 주 서브루틴을 포함하여 독립적인 해석이 가능하도록 개발되었다. 출력 값은 항공 기 성능을 결정하기 위해 다른 해석 모듈에도 필 요한 유해항력, 유도항력, 양항곡선, 임계 마하수, 양력계수, 최대 양력계수로 구성된다.[7][8]
양력계산과 안정성/ 조종성 계산을 위해서 Vortex Lattice Method(VLM)를 사용하는 AVL[9] 프로그램을 사용하였다. AVL은 임의의 형태를 갖는 항공기의 공기역학 및 비행동역학 해석에 관한 프로그램이다.
항력 서브루틴에서의 전항력은 유도항력, 조파 항력 그리고 후류항력을 포함한다. 이런 항력은 서로 다른 기종의 항공기와 경험적, 반경험적 관 계를 토대로 한 비행 상태에 대하여 공식화된다. 또한 아음속, 천음속 그리고 초음속 상태에 대하 여 계산 할 수 있도록 개발되었다.
공력해석 모듈에 대한 검증은 Predator A 형 상을 기반으로 이루어졌다.[10] 무인항공기는 주 로 긴 날개 스팬길이와 높은 가로세로비를 갖기 때문에, 계산 시간과 oswald factor, induced drag (K) factor의 정확성을 절충하는 날개의 최 적 패널 개수에 대한 연구를 수행하였다.
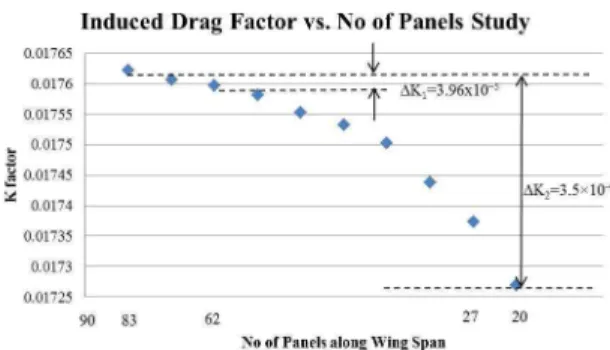
Fig 3. 날개의 최적 패널 개수에 대한 연구
날개의 패널 수와 induced drag factor에 대한 연구결과는 Fig 2에 나타나 있다. 날개 스팬에 따른 패널의 최대 개수는 90개이며, 많은 패널 수를 제공할수록 정확한 K factor의 값을 구할 수는 있지만 해석에는 더 많은 시간이 소요된다. Predator A의 형상이 20개의 패널을 가질 때와 패널 개수가 최대일 때를 비교하면 아래 그림과 같이 ∆ × 이다. 긴 날개 스팬이 60개 의 패널을 가질 때에는 ∆ × 이며, 이 정도의 차이는 허용가능한 정도이다. 따라서 검 증 과정에서는 이러한 점을 고려하여 60개의 패 널을 적용하였다. 검증은 Computational Fluid Dynamics(이하 CFD) 해석에는 가장 많이 쓰이 는 것 가운데 하나인 ANSYS FLUENT solver[11]의 fully turbulent spalart- almaras model을 적용하였다.
양력/항력 계산 검증
Predator A 날개의 유해항력과 유도항력으로 구성된 항력 계수의 값은 0.0291이다. 또한, Predator A의 양항비는 받음각 2.5°에서 22.8이 다. 공력해석 모듈을 이용하여 항공기의 양항비 를 계산하면 아래 그림 3과 같이 양항비가 22로 도출된다. CFD해석 결과 값과의 미세한 차이는 대부분 Predator A 날개의 양력 분배에 인한 것 으로 사료된다. 수평꼬리 날개와 동체가 전체 항 공기의 양력에 아주 조금이지만 영향을 미치기 때문이다.
Fig 4. L/D Ratio Validation with CFD
위 결과를 통하여 공력해석 모듈이 실제 무인 항공기에 대하여 적용 가능함을 검증하였다.
또한 본 연구에서 안정성 및 조종성 해석은 공 력해석 모듈에서 사용한 AVL의 결과로 도출된 다. AVL은 본 연구의 속도영역의 여러 형상에 대해 정확성이 이미 검증되어 있다.[9]
2.1.3 중량 해석 모듈
현재까지 개념설계 단계에서의 중량추정은 대 부분 Roskam, Raymer를 바탕으로 이루어지고 있다. 본 연구에서는 참고문헌을 바탕으로 무인 항공기의 특성을 고려하여 중량추정과 무게중심 을 도출할 수 있도록 하였다. 특히 무인항공기와 일반적인 항공기에 큰 가로세로비를 갖기 때문에 일반적으로 사용되는 추정식이 아닌 piecewise linear beam structure method를 사용하였다.[12]
따라서 날개를 piecewise Linear Beam model로 가정하고 윙 박스, 엔진과 이착륙장치 같은 miscellaneous item, 날개 조종면과 같은 second structure 및 rib 중량의 모두 포함하여 중량을 계산한다. 이 방법은 실제 설계에 사용된 사례가 부족하여 fidelity가 낮다는 단점이 있지만 일반 항공기에 대한 추정식을 사용하는 것보다는 정확 한 예측이 가능하다.
주 날개 외 꼬리날개, 동체, 랜딩 기어 등 각 구성부의 중량을 계산하고[2] flight control system, environmental control system 등과 같 은 Subsystem 중량과 avionics 중량을 추정하였 다. 모든 구성부의 중량을 추정한 후에는 공허중 량일 경우의 무게중심과, 연료를 포함하였을 때 의 무게중심, 그리고 payload까지 모두 포함하였 을 경우의 무게중심에 대한 결과를 도출하였다.
중량 해석 모듈 또한 Predator A의 open data 를 이용하여 검증을 수행하였다.
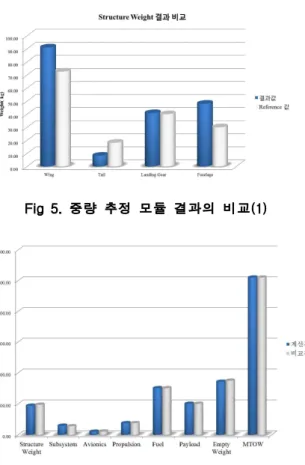
Fig 5. 중량 추정 모듈 결과의 비교(1)
Fig 6. 중량 추정 모듈 결과의 비교(2)
중량추정 모듈 결과 그림 4를 보면, 구조 무게 를 구성하는 각 부의 무게의 계산에는 다소 차이 가 있다. 하지만 그림 5에서 보듯이 각 부가 더 해진 전체 무게의 계산값은 실제 값과 차이가 거 의 나지 않는다. Predator A에 대한 최종적인 결 과인 empty Weight과 MTOW를 비교하면 각각 reference data와의 오차가 약 2%, 0.03%로 정확 하게 예측되었음을 알 수 있다. 전체 중량을 구 성하는 비율 또한 차이가 크게 나지 않음을 알 수 있다.
2.1.4 추진 해석 모듈
추진 해석 모듈은 항공기 속도에 따른 Specific Fuel Consumption(이하 SFC), 추력, efficiency 등의 계산을 수행한다. 추력을 계산할 때는 설 치 효과, TSFC, 추력 상실 그리고 고도와 마하수 에 따른 이용마력에 대하여 고려한다. 또한 TSFC의 결과 값은 임무 해석 모듈에서 연료 중 량을 예측하는데 사용된다. 이는 임무해석 단계 에서 연료 중량비 산출 시, TSFC 값이 중요한
Performance
Parameters Predator A Result Error (%) Unit Take-off
Ground Roll 1440 1306.59 9.26 ft Take-off
Distance 2000 1922.48 3.88 ft Landing
Distance 1700 1731.82 1.87 ft
Endurance 24 25.60 6.67 hrs
표 3. Predator A를 이용한 성능해석 검증 변수로 작용하기 때문이다. 그리고 항공기 속도
에 따른 이용마력은 성능 해석 모듈의 입력 파라 미터로 사용된다. 사용하는 엔진의 성능이 항공 기의 전체 성능에 미치는 영향이 크기 때문이다. [13][14]
프로펠러 엔진의 경우, Betz 조건을 따르는 최 적의 프로펠러 상태를 갖기 위하여 3D 와류 이 론이 사용되었다. 이 조건은 아래 프로펠러 엔진 에 대한 추진 해석 과정에 대한 그림에서 보이는 것처럼 프로펠러에서 발생되는 극도의 후류 또는 측풍을 고려한 상태로부터 유도될 수 있다.
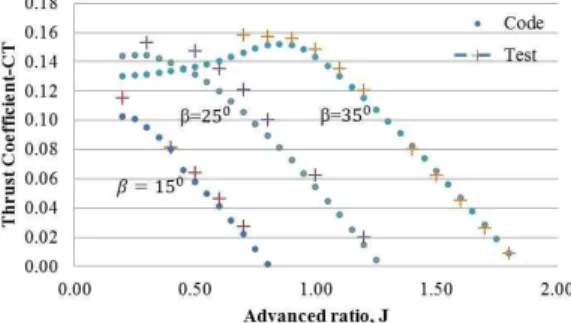
프로펠러에 대한 해석 코드는 2 blades propeller에 대해 검증되어졌다. 아래 그림 6, 7 은 그 검증 결과를 나타낸다. 결과를 보면 각각 다른 세 가지 propeller pitch angle에서도 실험 data를 잘 만족하는 것을 알 수 있다.
Fig 7. Thrust Coefficient Comparison with Test Data
Fig 8. Power Coefficient Comparison with Test Data
2.1.5 임무 해석 모듈
임무 해석 모듈은 대상 항공기에게 주어진 임 무 형상에 대하여 각 임무별 중량 비를 계산한 다. 임무 형상은 전체 27개의 다른 부분들을 사 용하여 구성할 수 있다. 초기 사이징 단계로부터
처음 유도되는 최대이륙중량, 연료중량, 추력 대 중량비 그리고 익면하중은 입력의 한 부분으로 사용된다. 해석이 끝난 뒤, 설계이륙중량 (TOGW), 설계중량, 연료 중량 그리고 총 비행시 간이 수정되면 이렇게 수정된 설계 중량과 연료 중량의 값은 중량 해석에 대한 입력 값으로써 사 용된다. 임무해석과 중량 해석에서, 연료중량은 고정된 값이 된다. [15][16]
2.1.6 성능 해석 모듈
성능 해석 코드는 point.f 프로그램[17]을 기반 으로 만들어 졌다. 따라서 추진 해석 모듈의 결 과인 비행속도에 따른 마력과 SFC를 사용하여 주어진 조건에 대해 최적의 이륙, 착륙 하강 거 리, 항속거리 그리고 비행시간을 계산한다. 또한 기존 point.f에 덧붙여, 이륙, 착륙, 비행시간 그 리고 항속거리와 같은 성능 파라미터를 계산한 다. 이 때, 공력 해석 모듈의 결과인 과 를 사용한다.[18] 성능 해석 모듈은 Predator A의 형상에 대해서 검증되었다. 아래 표 1에 나타낸 take-off, landing condition과 endurance에 대한 open data 값[10]을 기반으로 수행되었다. 결과 를 보면 data의 값을 결과가 잘 만족하는 것을 알 수 있다. 추력해석 과정에서 최대 이착륙 양 력 계수는 각각 1.4 그리고 1.8로 가정하였고, 엔 진은 rotax turbo charge 914에 대한 자료[19]를 참고하였다.
2.1.7 통합해석 결과
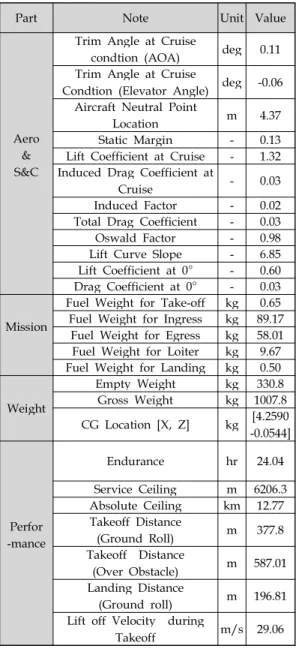
각 해석 모듈의 검증은 Predator A 형상을 입 력하여 해석모듈이 통합된 프로그램을 실행함으 로써 수행되었다. 각 모듈을 검증하면서 얻은 해 석 결과를 아래 표 2 함께 나타내었다. 통합해석 의 수행결과는 위에서 각 해석 모듈을 따로 실행 한 결과와 같음을 알 수 있다.
Part Note Unit Value
Aero
&
S&C
Trim Angle at Cruise
condtion (AOA) deg 0.11 Trim Angle at Cruise
Condtion (Elevator Angle) deg -0.06 Aircraft Neutral Point
Location m 4.37
Static Margin - 0.13 Lift Coefficient at Cruise - 1.32 Induced Drag Coefficient at
Cruise - 0.03
Induced Factor - 0.02 Total Drag Coefficient - 0.03 Oswald Factor - 0.98 Lift Curve Slope - 6.85 Lift Coefficient at 0° - 0.60 Drag Coefficient at 0° - 0.03
Mission
Fuel Weight for Take-off kg 0.65 Fuel Weight for Ingress kg 89.17
Fuel Weight for Egress kg 58.01 Fuel Weight for Loiter kg 9.67 Fuel Weight for Landing kg 0.50
Weight
Empty Weight kg 330.8 Gross Weight kg 1007.8 CG Location [X, Z] kg [4.2590 -0.0544]
Perfor -mance
Endurance hr 24.04
Service Ceiling m 6206.3 Absolute Ceiling km 12.77 Takeoff Distance
(Ground Roll) m 377.8 Takeoff Distance
(Over Obstacle) m 587.01 Landing Distance
(Ground roll) m 196.81 Lift off Velocity during
Takeoff m/s 29.06
표 4. 통합 해석 프로그램의 결과
Fig 9. 설계변수에 대한 민감도 분석 2.2 무인항공기 설계 최적화
본 연구에서는 Predator A을 Baseline으로 하 여 무인항공기의 최적화 연구를 수행하였다.
2.2.1 Sequential Quadratic Programming(SQP) 본 연구에서는 최적화 문제를 풀기 위하여 비 선형 최적화 기법인 SQP법을 사용하였다. SQP 법은 효율성이 입증되었으며 목적함수와 구속 조건을 설계 변수에 대해서 테일러 전개하고, 목
적함수는 이차식으로, 구속조건은 일차식으로 근 사하여 근사 부문제를 얻는다. 또한, 어떤 초기값 으로 시작하여도 해에 수렴한다는 것이 증명되었 으며, 다른 방법에 비해 수렴률이 빠르다는 장점 을 갖고 있다. SQP는 NPSOL, NLPQL, OPSYC, OPTIMA, MATLAB 등 많은 패키지에서 수행 할 수 있다. [20]
2.2.2 민감도 분석
Predator A을 기반으로 한 민감도 분석 결과 는 아래 그림 8과 같다. 모든 설계 변수들이 목 적함수인 ‘endurance’에 민감하다. 그 중에서도 목적함수에 대한 민감도가 높게 나타난 설계 변 수들은 날개의 span, 날개의 tip chord, 날개의 위치 그리고 설계속도이다. 이 결과는 다음과 같 이 the aerodynamics theory를 만족한다.
• 날개의 span이 증가하면 aerodynamic efficiency가 좋아지고 induced drag는 줄어든다.
결과를 보면 Predator A 의 날개 스팬이 16m 일 때 endurance가 가장 높은 것을 볼 수 있다. 따 라서 최적화된 형상을 통해 항속시간이 증가될 수 있는 여지가 있음을 알 수 있다.
• 날개의 tip chord는 간접적으로 날개의 가로 세로비와 유도항력에 영향을 준다. 따라서 목적 함수인 항속시간에 대한 민감도가 높다.
• 항속시간의 증가를 위해 날개의 위치를 움직 일 수 있는 범위는 아주 작다. 현재 Predator A 의 날개 위치가 항속시간을 가장 오래 가질 수
있는 최적의 위치와 가깝기 때문이다. 하지만 날개위치를 조금만 이동하더라도 baseline과 비 교하여 더 나은 항속시간을 가질 수 있다.
Baseline Bounds Unit Objective function:
Endururance 25.6 Lower Upper
Design Wing Span 14.8 13 22 m
표 5 . 최적화 문제 구성-설계변수
Variables
Root Chord 1.15 1.05 1.3 m Tip Chord 0.4 0.3 0.5 m
Sweep
Angle 5 0 10 deg
Dihedral
Angle 0 0 5 deg
Wing
Location 3.59 3 4 m
HT Span 4.4 4 5 m
HT Root
Chord 0.74 0.6 0.9 m
HT Tip
Chord 0.74 0.4 0.8 m
HT Sweep
Angle 0 0 10 deg
Perf.
Variables Design
Speed 42 27.78 62 m/s
Constraints Description G(1) Wing Taper ≥ 0.2 G(2) SM ≥ 0.05 G(3) SM ≤ 0.15
G(4) Take-off Distance ≤ 1000 (m) G(5) ≤ -0.03
G(6) MTOW ≤ 1020 (kg)
G(7) Wempty ≤ 360 (kg)
G(8) L/D ≥ L/Dbaseline
표 6 . 최적화 문제 구성-구속조건
• 설계 속도는 항공기의 설계 비행컨디션을 결 정하는 가장 중요한 요소 중 하나이다. 현재 Predator A의 비행속도는 계산된 최적속도와 거 의 같다. 따라서 최적화된 형상으로 무인항공기 의 형상이 바뀌더라도 설계비행속도에는 큰 변화 가 없을 것이라 추측할 수 있다.
본 연구에서는 목적함수인 항속시간 외에도 Static Margin(이하 SM)와 공허중량, 최대이륙중 량, 양항비, 이륙거리, 요잉모멘트 등과 같은 다 른 구속조건들의 민감도 해석도 수행하였다. 2.2.3 최적 설계 문제 구성
Predator A의 임무형상은 아래 그림 9와 같다.
Fig 10. Predator A Mission Profile[21]
본 연구에서는 Predator A의 형상을 최적화하 여 항속시간을 최대로 증가시키는 것을 목표로 하여 수행하였다.
Maximize
Subject to ≤
여기서 는 설계 변수로, 표 3과 같이 민감도 해석 결과를 반영하여 날개와 꼬리날개 형상 및 설계 속도 등 11개로 구성되어 있다. 또한
구속조건으로 표 4와 같이 총 8개로 형상 및 공 력해석, 조종안정성 해석, 중량해석, 성능해석 결 과로 이루어져 있다.
2.2.4 무인항공기 최적화 결과
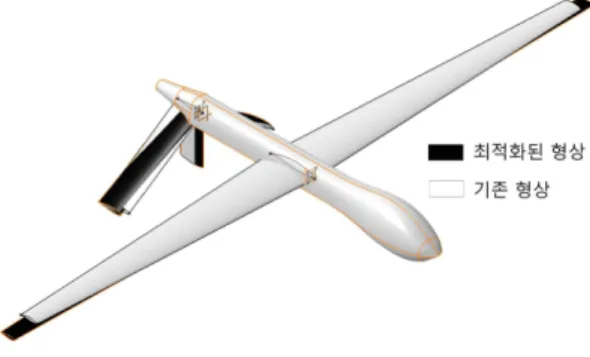
Predator A 형상을 기반으로 최적화 모듈과 구속조건을 통해 그림 10과 같은 새롭게 최적화 된 형상을 얻었고, 그림 11에서 나타난 convergence history에서 볼 수 있듯이 성공적으 로 항속시간을 증가시킬 수 있었다.
아래 표 5, 6 결과와 그림 10을 보면, 날개의 스팬길이가 14.8m에서 15.81m로 최적화되었다.
이 값은 앞서 수행한 민감도 분석을 통해 신뢰성 이 입증되었다 할 수 있다. 민감도 분석에서 날 개 스팬이 16m 일 때 항속시간이 가장 높았기 때문이다. 항속시간이 28시간으로 최적화 되어 증가한 것으로 보아 날개 스팬 증가에 따른 항속 시간의 증가에 대한 경향이 정확하였음을 알 수 있다.
날개의 위치도 3.59m에서 3.95m로 뒤로 이동 하였다. 이것은 간접적으로 Static Margin를 11.7%에서 9%로 감소시키고 항속시간을 증가시 키는 요인이 되었다.
설계 속도 값은 민감도 분석 결과에서 약
Baseline Optimized Result Objective Endurance (hrs) 25.6 28
Design Variables
Wing Span(m) 14.8 15.8 Root Chord(m) 1.15 1.28 Tip Chord(m) 0.4 0.47 Sweep Angle(deg) 5 1.21 Dihedral Angle(deg) 0 1.61 Wing Location(m) 3.59 3.95
HT Span(m) 4.4 4.2
HT Root Chord(m) 0.742 0.70 HT Tip Chord(m) 0.742 0.53
HT Sweep
Angle(deg) 0 0.78
표 7 . Optimum UAV Configuration
Constraints Baseline Optimized Result G(1) Wing Taper ≥ 0.2 0.35 0.365 G(2,3) 0.15≥ SM ≥ 0.05 0.117 0.09
G(4) Take-off Distance
≤ 660 (m) 1025 994
표 8 . Optimum UAV Constraints
G(5) ≤ -0.03 -0.088 -0.053 G(6) MTOW ≤ 1020 (kg) 1012 1010
G(7) Wempty ≤ 360 (kg) 336 333
G(8) L/D ≥ L/Dbaseline 22.2 23.24 40m/s였다. 현재 Predator A의 속도는 민감도
분석을 통해 도출되는 최대항속시간에 최적화된 속도와 거의 비슷하다. 따라서 설계 속도에 관한 결과가 baseline과 이론적 경향을 아주 잘 만족 한다고 판단할 수 있다. 최적화된 형상은 수평꼬 리날개가 Predator A보다 작고, 날개의 dihedral angle이 생겼다. 이 결과는 롤링 모멘트를 증가 시켰지만 여전히 안정성을 만족한다. 그리고 이 륙 거리가 baseline보다 길어진 이유는 해석과정 에서 Predator A와 다른 엔진 데이터를 사용하 였기 때문이라 사료된다.
Fig 11. Configuration Comparison
Fig 12. Convergent History of Endurance
3. 결 론
본 연구에서는 주어진 형상을 통합적으로 해석 하고 최적화 할 수 있는 무인항공기 통합 해석 및 최적화 프로그램을 개발하였다. 무인항공기 통합 해석 및 최적화 프로그램은 공력 해석 모듈 외에 중량해석, 성능해석, 임무해석, 추진해석, 조 종안정성 해석 모듈로 구성되어 있다. 모든 모듈 들은 무인 항공기에 대한 적합성이 검증되었으 며, 특히 중요한 공력 모듈은 전산유체 해석을 통해 검증하였다. 본 프로그램의 최적화 모듈을 구축하기 위하여 SQP법을 이용하였고, 최적화 문제를 구성하는 목적함수에 대한 형상 변수들의 경향을 파악하기 위하여 민감도 해석을 수행하였 다. 또한, 실제 각국에서 운용되고 있는 중고도 무인기인 Predator A의 데이터를 baseline으로 하여 본 프로그램을 통해 통합 해석을 수행하였 다. 그 결과를 이용하여 형상을 최적화하여 형상 의 변화로부터 보다 향상된 성능을 얻을 수 있음 을 확인하였다.
결론적으로, 공력해석, 추진해석, 임무해석, 중 량해석, 성능해석 및 조종안정성 해석 프로그램 및 최적화 모듈로 구성된 무인항공기 통합 해석 및 최적화 프로그램을 개발하였으며, 이 프로그 램은 성공적으로 비행체의 형상을 최적화하여 향상된 성능 해석 결과를 제공함을 확인하였다.
후기
본 연구는 국방과학연구소의 지원(2010-A004 -0021)과 교육과학기술부의 지원(2012033521)으로 수행되었으며 지원에 감사드립니다.
참고문헌
[1] 김승주, "진화하는 무인항공기", 아시아경제 사이언스포럼, 2011년 11월.
[2] Daniel P. Raymer, Aircraft Design: A Conceptual Approach, 4th ed., AIAA, 2006.
[3] Hague. D, GASP-General Aviation Synthesis Program, Theoretical Development, Vol 1. Main Program, Pt. 1, NASA Ames Research Center, Jan. 1978.
[4] Ryu Tae Gyu, Jung In Jae, “A study on Synthesis Program Development for Aircraft Conceptual Design:, KSAS conference, April.
1996.
[5] 이재우, 정갑주, 황호연, “유도무기 다학제간 최적설계 기법연구 최종 보고서”, 국방과학연구 소 장기기초 연구, 2005년 12월.
[6] Nhu-Van Nguyen*, Seok-Min Choi, Jong-Mu Sur, Jae-Woo Lee, Sangho Kim and Yung-Hwan Byun, “Multidisciplinary Regional Jet Aircraft Design Optimization Using
Advanced Variable Complexity Techniques”, MAO-AIAA, Texas 21-24th Sept. 2010
[7] Schemensky, R., Howell, R., Aerodynamic Accounting Techniques, Lockheed, 1978.
[8] Kim Sang-Jin, Jeon Kwon-Su, Lee Jae-Woo,
“A Study on the Total Drag Estimation for the Aircraft Conceptual Design”, Journal of the Korea Institute of Military Science and Technology, 1999.
[9] “AVL,” MIT University.
http://web.mit.edu/drela/Public/ web/avl.
[10] http://en.wikipedia.org/wiki/MQ-1_Pred ator.
[11] http://www.ansys.com/Products/Simulati on+Technology/Fluid+Dynamics/Fluid+Dy namics+Products/ANSYS+Fluent
[12] John Frederick Gundlach, “Multi- Disciplinary Design Optimization of Subsonic
Fixed-Wing Unmanned Aerial Vehicles Projected Through 2025”, Ph.D thesis, Virginia Polytechnic Institute and State University, Feb.
2004.
[13] Jan Roskam, Airplane Design PartⅡ:
Preliminary Configuration Design and Integration of the Propulsion System, Roskam Aviation and Engineering Corporation, 1985.
[14] Jan Roskam, Airplane Design PartⅥ:
Preliminary Calculation of Aerodynamic, Thrust, and Power Characteristics, Roskam Aviation and Engineering Corporation, 1985.
[15] Steven A. Brandt, Aerodynamic 3.0, AIAA Education Series, AIAA, NewYork, 2004.
[16] Seok-Min Choi, “Multidisciplinary UAV Design Optimization Implementing Multi-Fidelity Analysis Techniques”, Konkuk Univ, Feb. 2010.
[17] Frederick O. Smetana, Flight Vehicle Performance and Aerodynamic Control, AIAA Education Series, AIAA, NewYork, 2001.
[18] Nhu Van, Nguyen, “An Efficient Multi-fidelity Approach for the Multi-Disciplinary Aerospace System Design and Optimization”, Ph.D thesis, Konkuk Univ, Aug. 2011.
[19]http://www.rotaxservice.com/rotax_engines /rotax_914ULs.htm
[20]http://en.wikipedia.org/wiki/Sequential_qua dratic_programming
[21]http://www.fas.org/irp/doddir/usaf/conops _uav/part03.htm
![Fig 10. Predator A Mission Profile[21]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5234352.359491/7.892.437.732.120.429/fig-predator-a-mission-profile.webp)