A Study on 3D Model Building of Drones-Based Urban Digital Twin
18
0
0
전체 글
(2) 임성하 ∙ 최규명 ∙ 조기성. 1. 서론. 트시티 응용분야에 활용 가능성을 확인하고자 한다.. 1.1. 연구목적. 1.2. 연구동향. 최근 도시의 인구 집중화에 따라 교통, 안전, 경제,. 고밀도의 수직화 된 도시공간에 대한 3차원 디지털. 환경/에너지, 생활/복지, 행정 등의 분야에서 에너지. 모형구축은 스마트시티의 공간정보 기반구축 뿐만 아. 소비량 및 교통 혼잡도 증가, 물 부족 등 다양한 도시. 니라 입체지적, 사이버국토 구축 등에 있어서도 중요. 문제가 발생하고 있다. 이와 같은 문제점을 ICT를 이. 한 요소로 간주되고 있으며, 1990년대부터 다양한 센. 용하여 해결하고자 유럽과 일본, 미국은 스마트시티. 서 기반으로 수동・반자동・자동화에 대한 연구가 활발. 관련 기술선점을 위해 공격적인 투자를 하고 있으며,. 히 진행되고 있다. 최근 정책적으로 드론산업을 4차. 중국은 도시 혁신을 위해서 스마트시티를 국정 아젠. 산업 발전과제로 견인함에 따라 기존 유인항공측량. 다로 제시할 정도로 스마트시티 세계시장은 2020년. 기반에서 획득할 수 없는 저고도・고정밀・저비용의 3. 까지 1조5천억 달러로 성장이 예상된다(Frost & Sullivan. 차원 공간모델 구축의 장점을 활용하기 위한 연구도. 2019).. 활발히 진행 중에 있다.. 이러한 스마트시티는 컴퓨팅 기술과 ICT 기술이 융. 드론 사진측량의 정확도 분석 연구를 살펴보면 이. 합된 디지털트윈(Digital Twin)을 핵심 공동플랫폼으. 성재(2016)는 토목건설 현장의 지형측량을 위해 고정. 로 한다. 즉, 시뮬레이션, 인공지능, IoT, 공간정보, 실. 익과 저가형 회전익 드론을 이용하여 4cm/pixel 공간. 시간 네트워크 등 융합된 디지털트윈 플랫폼 구축을. 해상도의 정사영상과 수치표면모델을 제작하였고 기. 통해 도시운영에 필요한 정보를 연계 통합하고 가상. 존 지형측량 성과물과 비교하여 평균제곱근 오차가 x,. 세계로 전환하여 다양한 도시문제를 해결하고자 하고. y, z 방향에서 10cm 내외로 분석하였다. 이병걸(2018). 있다. 스마트시티 플랫폼을 구현하기 위한 핵심 인프. 은 회전익 드론에 일반카메라를 장착하여 검사점에. 라는 공간정보이다. 스마트시티 구축의 목적인 도시. 대한 오차분석결과 수평(x,y)오차 9cm, 수직(z)오차. 문제를 해결하기 위해서는 도심의 위치・속성기반의. 7.7cm의 정확도를 얻었으며, 최민식(2018)은 수치지. 공간정보 인프라 내에서 정확한 현황 분석 및 결과 예. 형도 제작을 위한 드론 사진측량 방법의 효용성을 평. 측 등이 가시적이고 효율적으로 이루질 수 있기 때문. 가하는 연구에서 드론사진측량으로 제작한 수치지형. 이다. 이러한 공간정보 구축에 있어 항공 Lidar측량,. 도를 지상측량 방법으로 검증한 결과 평면오차가 평. 지상 Lidar측량, 차량 Lidar측량, 다방향 항공측량 등. 균 4cm, 최대 8cm이며, 표고오차는 평균 11cm, 최대. 다양한 센서를 기반으로 3D공간정보 구축에 대한 실. 31cm로 분석하였다. 노홍석(2018)은 드론을 이용한. 증 연구가 진행되어 왔다. 최근에는 최신 드론 신기술. 지하시설물도 작성 연구에서 실험지역 매설배관의 지. 을 활용하여 효과적인 3차원 공간정보 구축 방안에 대. 상측량 좌표와 7번에 걸친 드론 촬영 데이터의 17번. 한 요구가 증가하고 있다.. 프로세싱 결과를 비교하여 부적합 판정기준인 평면기. 이에 본 연구의 목적은 저비용・고품질의 3차원 공. 준점 RMSE가 10cm 이상 초과는 2개 프로세싱에서만. 간정보 취득이 가능한 드론을 활용하여 도심지 3차원. 나타났음을 제시하였다. 사전연구를 통해 고찰한 결. 모형을 구축하는 것이다. 또한 디지털 트윈 모델로서. 과 드론 사진측량의 정확도는 드론 사진촬영 당시 촬. 구축된 모형의 품질과 효율성 분석을 실시하고 스마. 영고도, 카메라해상도, 중복도 등에 따라 다르지만 평. 164. 「지적과 국토정보」 제50권 제1호. 2020.
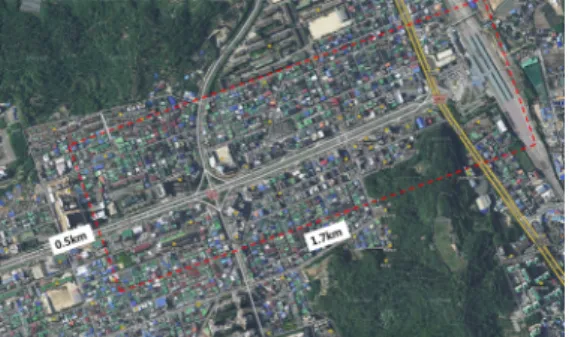
(3) 드론기반 도심지 디지털트윈 3차원 모형 구축에 관한 연구. 면오차가 평균 10cm 이내로 항공 사진측량 작업규정. 서 자체의 효용성 분석에 치중하고 있어 본 연구에서. 1/500~1/600 축척의 평면기준점 오차한계인 표준편. 는 드론기반의 스마트시티 디지털트윈 베이스맵 구축. 차 14cm 이내, 최대값 28cm 이내인 규정 대비 높은. 활용성을 제시하고자 한다.. 정확도를 나타내고 있음을 알 수 있다. 드론 사진측량을 활용한 도시모델의 3차원 모델링. 1.3. 연구 범위 및 방법. 관련연구를 살펴보면 M. Jarzabek-Rychard(2016)는 드론 사진측량의 도시 모델링의 품질을 평가하기 위. 본 연구는 공간정보 인프라인 3차원 건물모형 생성. 해 드론에 장착한 고성능 라이다로 취득한 건물모델. 에 있어서 물리적인 3차원 현황을 저비용으로 고정밀. 과 드론 사진측량으로 취득된 데이터와의 정확도를. 하게 취득할 수 있어 최근 활용도가 높아지고 있는 드. 비교한 결과 두 개의 센서 간의 표준편차는 0~4.5cm. 론 사진측량 기법을 활용하여 최적화된 3차원 건물모. 로 분석하였다. Shreyansh Daftry(2015)는 건물의 파. 형을 구축하고자 하였으며 디지털트윈 기반 스마트시. 사드를 재구성하기 위해 드론에서 촬영된 영상을 이. 티 구축은 대부분 도심지 위주로 구축되기 때문에 저. 용하여 SFM 알고리듬을 이용하는 상용 소프트웨어와. 층・중층・고층 건물이 비교적 밀집되어 있는 전주역. 개발한 알고리즘 간의 평균오차를 비교하였다.. 백제대로 연장 1.7km와 폭 0.5km를 연구대상지역으. Norzailawati Mohd Noor(2019)는 회전익 드론을 이. 로 선정하였다.. 용하여 도심 유적지의 3차원 모델링을 수행하였고, 수. 연구대상지역은 Figure 1과 같이 저층건물(단독 주. 행된 결과를 3차원 GIS와 통합하여 새로운 개발계획. 택)과 고층건물(아파트)로 구성된 주거지역과 중층건. 의 영향을 분석하기 위한 시뮬레이션 데이터로 활용. 물(상가건물)로 구성된 상업지역이 복합적으로 밀집. 하였다. Siyuan Chen(2019)는 교량 점검을 위해 드론. 된 지역으로서 구축된 3차원 건물모형의 평면 위치 정. 사진측량 기법으로 드론과 교량간의 촬영거리에 따라. 확도와 건물 높이에 따른 수직 위치 정확도 등을. 생성된 3차원 점군(Point Cloud)데이터와 지상레이. 평가하기에 적합한 지역이다.. 저측량으로 생성된 데이터간 데이터 품질 및 정확도. 드론 사진측량 기반으로 저비용・고정밀의 도심지. 를 분석하였다. 유세종(2018)은 커튼월 건축물의 3차. 디지털트윈 3차원 모형 구축의 최적화 방안을 모색하. 원 모델 구축을 위해 적합한 드론촬영 방법을 제시하. 기 위해 다양한 드론 사진촬영 기법과 상용 사진측량. 였으며, 커튼월 건축물의 구조상 빛 반사와 투명객체. S/W를 사용하여 처리한 결과를 비교 분석하여 최적. 로 인해 생성된 3차원 모델의 왜곡이 발생하는 부분을. 화된 방안을 제시하고 구축된 모형을 대상으로 스마. 개선시켰으며 구축된 3차원 모델의 위치 정확도를 지 상측량 결과와 비교한 결과 X,Y는 3cm이내, Z는 5cm 이내로 확인하였다. 위와 같이 드론 사진측량을 이용한 3차원 재구성에 관련된 연구는 주로 문화유산 보존과 교량 및 건축물 의 점검을 목적으로 연구가 진행되었으며, 이에 따른 적합한 촬영 방법 제시나 구축결과의 품질과 정확도 분석이 주류를 이루고 있다. 기존 연구는 스마트시티 디지털트윈 베이스맵 구축에 적합성 분석 보다는 센. Figure 1. Study Area (1.7km X 0.5km) Journal of Cadastre & Land InformatiX Vol.50 No.1 (2020). 165.
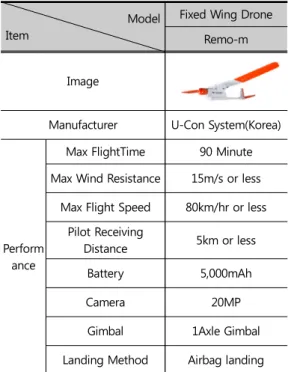
(4) 임성하 ∙ 최규명 ∙ 조기성. Table 1. Details of equipment used in the study Model Item. Fixed Wing Drone Remo-m. Image Manufacturer. Perform ance. U-Con System(Korea). Max FlightTime. 90 Minute. Max Wind Resistance. 15m/s or less. Max Flight Speed. 80km/hr or less. Pilot Receiving Distance. 5km or less. Battery. 5,000mAh. Camera. 20MP. Gimbal. 1Axle Gimbal. Landing Method. Airbag landing. Figure 2. Control Point Positions installed in the study area. Figure 3. Control & check Point Installation Position and Standard. 트시티 응용시스템과 연계하여 스마트시티 활용성을 모색하였으며, 연구에 사용된 기체는 Table 1과 같다.. 하도록 대공표지를 설치하였다.. 또한 구축한 모형을 스마트시티 응용시스템에 연계를. 지금까지 연구되어 왔던 드론 사진측량관련 작업규. 위해 Skyline사의 TerraExplorer Pro를 이용하여 지. 정 연구(이재원 2015)에 따르면 드론 정사영상의 위. 적도, 수치항공영상, DEM, 지하시설물 등 다양한 공. 치정확도 확보와 검증을 위해서는 Figure 3와 같이. 간정보 자료와 매쉬업 하였으며, 일조권・조망권・방범. 50cm X 50cm 이상의 대공표지 설치와 1 km2 당 기준. 순찰・소방안전 등 스마트시티 활용모델을 구현하. 점 9개 이상, 검사점 4점 이상 관측을 명시하고 있다.. 였다.. 이러한 기준에 따라 연구대상지에 총 24개의 기준점 과 8개의 검사점을 설치하였으며, 항공삼각측량 후 생. 2. 드론 항공영상 취득. 성된 정사영상의 정확도 검증에 활용하였다.. 2.1. 기준점측량. 2.2. 3차원 형상모델을 위한 항공영상 촬영. 연구대상지역의 드론촬영 전 항공삼각측량의 정확. 카메라 축이 90°인 수직방향 촬영은 2차원 정사영. 한 외부표정요소의 결정을 위해 Network-RTK GPS. 상을 제작하기 위해 필요한 촬영방법이나 건축물의. 장비를 이용하여 Figure 2와 같이 총 31점에 대해 기. 입면 등의 3차원 도심지 정보를 취득하기 위해서는 경. 준점측량을 실시하고 항공영상에서 육안식별이 가능. 사 사진촬영이 필요하다. 카메라 축이 90°가 아닌 다. 166. 「지적과 국토정보」 제50권 제1호. 2020.
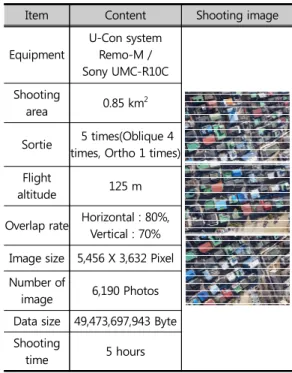
(5) 드론기반 도심지 디지털트윈 3차원 모형 구축에 관한 연구. Table 2. Camera angle according to shooting purpose Shooting Method. Vertical shooting. Low slope shooting. High slope shooting. Image. Shooting angle. 0°. Shooting Orthoimage purpose. 30° Low building. 45°∼60° High building. 른 각도로 설정하여 촬영한 항공사진을 경사항공사진 이라 한다. Table 2처럼 경사가 낮은 항공사진은 주로 카메라 축에서 30°의 기울기로 촬영되며, 저층건물의 3차원 정보를 취득하기 위해 사용된다. 반면에 45°~ 60° 사이의 고경사 촬영각도는 도심지의 고층건물 입. Table 3. Aerial photography results of the study area Item. Content. Equipment. U-Con system Remo-M / Sony UMC-R10C. Shooting area. 0.85 km2. Sortie. 5 times(Oblique 4 times, Ortho 1 times). Flight altitude. 125 m. Overlap rate. Horizontal : 80%, Vertical : 70%. Image size. 5,456 X 3,632 Pixel. Number of image. 6,190 Photos. Data size. 49,473,697,943 Byte. Shooting time. 5 hours. Shooting image. 면정보를 취득하는데 적합한 방법이다. 본 연구에서는 연구대상지의 드론 항공촬영을 위해. 였다. 영상처리의 주요 원리는 다양한 각도에서 촬영. 서 수직촬영을 포함하여 동・서・남・북 경사방향으로. 된 중복영상으로부터 3차원 형상과 촬영한 카메라 위. 총 5가지 방향으로 드론 항공촬영을 진행하였다. 2차. 치정보를 재현하는 SFM(Structure from Motion) 알. 원 항공정사영상 제작 시 1방향의 수직촬영에 비해 4. 고리즘(Noah Snavely 2006)과 영상에서 영상의 크기. 방향이 추가됨에 따라 약 5시간의 비행시간이 소요되. 와 회전에 불변하는 특징을 추출하는 SIFT(Scale. 었다. Table 3은 연구지역의 드론 항공촬영 결과를 나. Invariant Feature Transform) 알고리즘(DG Lowe 1999). 타내고 있다.. 에 의해 작동한다. 대다수의 사진측량 소프트웨어는 Figure 4의 처리. 3. 드론 영상 처리 및 결과 분석. 절차에 의해 결과물을 생성하며 초기데이터로 드론촬 영 원본영상, 카메라정보, 기준점 정보를 입력하면,. 3.1. 사진측량 소프트웨어 처리 절차. SIFT와 SFM 기법으로 촬영된 영상에서 특징점을 추 출하여 저밀도 측점 군을 도출하고 지상기준점을 활. 드론사진측량에 활용되는 소프트웨어는 제품군의. 용하여 향상된 상호표정요소(카메라 위치정보와 자세. 특징별로 다양한 종류가 있으며, 초창기에는 주로 어. 정보) 및 절대표정요소를 산출한 후, 고밀도 측점군의. 떤 영상에서 특징들의 이해를 위해 프로그램하는 것. 실세계 3차원 공간정보를 재현한다. 고밀도 측점군을. 을 목적으로 하는 컴퓨터 비전(Computer Vision) 분. 활용하여 비정규삼각망(TIN)을 구성하고 질감(Tex-. 야에서 영상을 3차원으로 매핑하는 방향으로 발전하. ture)을 추가하여 가시성을 증강한다. 결과물은 수치 Journal of Cadastre & Land InformatiX Vol.50 No.1 (2020). 167.
(6) 임성하 ∙ 최규명 ∙ 조기성. Table 4. Computer Specifications used for data processing. Figure 4. Processing Procedure of Drone Photogrammetry. Item. Specifications. CPU. Intel Xeon E5-2687W v3. Memory. 256 GB. Graphic Card. Nvidia Quadro M6000 12GB. OS. Window 7 pro 64 bit. 3.2. 영상처리 결과 분석 표고모형과 정사영상, 그리고 3차원 모델링 데이터가 산출된다.. 총 6,200여장(5,456pixel x 3,632pixel)의 드론 항. 본 연구에서는 디지털트윈에 활용될 수 있는 최적. 공촬영 영상과 카메라 자세정보 등을 입력하여 0.85. 의 3차원 모형을 구축하고 데이터 처리시간과 품질 및. km2 대상지역에 대해 Figure 5와 같은 공간해상도. 정확도 등을 비교하기 위해 상용제품으로 판매되는 3. (GSD) 2.6cm/pixel의 2차원 정사영상과 Figure 6과. 종의 소프트웨어를 검토하였으며, 데이터 처리에 사. 같은 3차원 모형데이터를 구축하였다. 영상처리에 사. 용된 컴퓨터 사양은 다음 Table 4와 같다.. 용한 사진측량소프트웨어는 현재 10여종의 상용소프 트웨어가 있으며, 대부분 처리과정은 유사하나 각 소. Figure 5. Image processing result (GSD 2.6cm True orthoimage). 168. 「지적과 국토정보」 제50권 제1호. 2020.
(7) 드론기반 도심지 디지털트윈 3차원 모형 구축에 관한 연구. Figure 6. Image processing result(3D building model). 프트웨어마다 다른 특징들이 있기 때문에 3차원 데이 터 품질 부분에서 차이가 발생할 것으로 예상하여 총 3종의 사진측량 소프트웨어를 대상으로 데이터를 처 리하여 정확도와 처리시간, 결과물의 품질 등을 비교 하였다.. 3.2.1. 처리시간 및 데이터 품질분석 연구대상지역을 총 3종의 사진측량소프트웨어를 이용하여 구축한 디지털트윈 3차원 모형의 구축 효율 성 평가를 위해 처리시간과 생성된 데이터의 품질을. Table 5. Data processing time of the three software Item. A Corp.. B Corp.. C사 Corp.. 3h:45m:32s. 1h:57m:08s. 9h:49m:16s. 6h:51m58s. 12h:37m22s 7h:34m:11s. 6h:24m:24s. Align and 5h:11m:45s Aerial Triangulation Build Denscloud Build Mesh. 25h:23:10s. Build Texture 10h:8m:27s 10h:34m:22s 10h:06m:03s SUM. 53h:20m:44s 31h:43m:21s 25h:19m:33s. 분석하였다. Table 5에 나타낸 바와 같이 A사 제품인 경우 데이 터 초기처리 단계에서는 약 5시간, 데이터 후처리 단 계에서는 약 48시간이 소요되어 총 53시간이 소요되 어 3종의 소프트웨어 중 가장 많은 시간이 소요되었으 며, B사 제품인 경우 데이터 초기처리에 약 4시간, 데 이터 후처리에 29시간으로 총 31시간이 소요되었다. C사 제품은 총 25시간이 소요되어 3종 소프트웨어 중 에 가장 빠른 시간에 결과물을 산출하였다.. 데이터 처리 시 각 단계별로 구현된 알고리즘과 처 리공정 마다 CPU와 메모리, GPU의 자원을 활용하는 최적화에 따라 처리시간이 다른 것으로 판단된다. 그 리고 3차원 디지털트윈 모델 구축에 있어서 영상처리 속도 뿐만 아니라 구축된 3차원 건물 모형의 높이, 구 조, 재질 등을 표현할 수 있는 Mesh와 Texturing의 품질도 중요한 요소이므로 이를 검토하였다. 품질비교 결과 Table 6와 같이 A사의 산출결과는. Journal of Cadastre & Land InformatiX Vol.50 No.1 (2020). 169.
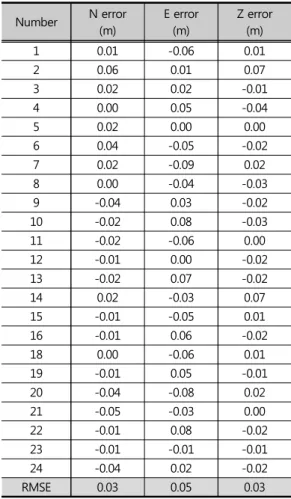
(8) 임성하 ∙ 최규명 ∙ 조기성. Figure 8. Types of errors in the triangle Table 6. Data quality analysis Item. Image (All). Image (Details). A. Figure 7. 3D model of triangle B. 고층건물과 저층건물 모두 메시 오류가 많은 부분 나 타났으며, 특히 고층건물의 경우 건물 외벽의 구멍과 건물 옥상 모서리 부분에 None-manifold Face가 심 하게 발생하여 전반적으로 메시 오류를 수정하기 불 가할 정도로 낮은 메시와 재질(texture) 품질을 나타. C. 내었다. B사의 경우 일부 고층건물 외벽면에 Figure 8의 None-manifold Face가 발생하였지만, 이는 메시 수 정 과정을 거치면 복원할 수 있는 수준이라 판단되며, 재질의 품질은 3종의 소프트웨어 중 가장 높았다. C사. 3.2.2. 정확도 분석. 의 경우 고층과 저층건물 전반적으로 과도한 메시 오. 앞서 분석한 데이터 처리시간과 품질 면에서 가장. 류는 나타나지 않았으며, 일부 None-manifold Face. 우수한 C사의 소프트웨어로 구축된 결과물을 Network-. 만 수정하면 충분히 활용 가능한 품질을 나타내었다.. GPS장비를 이용해 총 8개의 검사점을 관측한 값과 제. 결과적으로 데이터 처리시간과 품질을 분석한 결과. 작된 드론 정사영상에서 검사점을 육안으로 독취하여. C사의 소프트웨어로 제작한 결과물이 가장 우수하여,. 기록한 값을 비교하였다.. 본 연구에서는 이를 이용한 정확도 분석 및 스마트시. Table 8에 나타난 것과 같이 최대오차는 N방향으. 티 응용시스템에 적용하여 활용성을 제시하였다.. 로 0.03m, E방향으로 0.06m, Z방향으로 0.04m로 나. Table 6는 데이터 품질 분석 결과를 나타내고 있다.. 타났으며, 평균제곱근오차(RMSE)는 N방향으로 ±0.04m, E방향으로는 ±0.03m, Z방향으로 ±0.02m가 나타났 다. 이는 기존 선행연구와 비교 분석한 결과 오차가. 170. 「지적과 국토정보」 제50권 제1호. 2020.
(9) 드론기반 도심지 디지털트윈 3차원 모형 구축에 관한 연구. Table 7. Control point position errors. 0.1m 이내로 나타날 것이라고 예상했던 것보다 더욱 우수한 결과를 보였다.. Number. N error (m). E error (m). Z error (m). 1. 0.01. -0.06. 0.01. 2. 0.06. 0.01. 0.07. 3. 0.02. 0.02. -0.01. 4. 0.00. 0.05. -0.04. (RMSE)는 N방향으로 ±0.03m, E방향으로는 ±0.05m,. 5. 0.02. 0.00. 0.00. Z방향으로 ±0.03m로 나타났다.. 6. 0.04. -0.05. -0.02. 7. 0.02. -0.09. 0.02. 8. 0.00. -0.04. -0.03. 시행지역의 경계점에 대한 측량성과와 검사성과의 허. 또한, Table 7과 같이 생성된 정사영상의 기준점 최 대 위치오차는 N방향으로 0.06m, E방향으로 0.09m, Z방향으로 0.07m가 발생되었으며, 평균제곱근오차. 이는 지적측량 시행규칙 제27조 경계점좌표등록부. 9. -0.04. 0.03. -0.02. 용범위로 규정하고 있는 0.1m 미만으로 나타났으며,. 10. -0.02. 0.08. -0.03. 11. -0.02. -0.06. 0.00. 항공사진측량 작업규정(국토지리정보원 고시, 2013). 12. -0.01. 0.00. -0.02. 13. -0.02. 0.07. -0.02. 준편차 0.14cm 이내로 나타나므로 지적과 항공사진. 의 1:500~1:600 축척의 사진기준점 오차 한계인 표. 14. 0.02. -0.03. 0.07. 측량에서 규정하는 대축척의 오차 한계를 모두 만족. 15. -0.01. -0.05. 0.01. 16. -0.01. 0.06. -0.02. 하여 두 분야에서 활용이 가능하다고 판단된다.. 18. 0.00. -0.06. 0.01. 19. -0.01. 0.05. -0.01. 20. -0.04. -0.08. 0.02. 21. -0.05. -0.03. 0.00. 22. -0.01. 0.08. -0.02. 23. -0.01. -0.01. -0.01. 템에서 활용성을 검토하기 위해 Skyline사의 Terra. 24. -0.04. 0.02. -0.02. Explorer Pro를 이용하였다.. RMSE. 0.03. 0.05. 0.03. 4. 스마트시티 응용시스템과 연계 본 연구에서 산출된 결과물을 스마트시티 응용시스. TerraExplorer Pro는 위성영상, 항공영상, 드론영. Table 8. Check point position errors (unit : m) GPS survey coordinate(A) . Image reading coordinate(B) . N. E. Z. N. E. check1. 360623.79. 213236.19. 47.63. 360623.71. check2. 361038.09. 213245.89. 53.52. check3. 360933.38. 213567.46. check4. 360864.45. 213869.44. check5. 361245.57. check6. Z. N error. E error. Z error. 213236.16. 47.66. 0.08. 0.03. -0.03. 361038.06. 213245.83. 53.51. 0.03. 0.06. 0.02. 54.71. 360933.35. 213567.46. 54.71. 0.03. 0.00. 0.01. 52.47. 360864.45. 213869.47. 52.49. 0.00. -0.03. -0.02. 213723.41. 53.72. 361245.59. 213723.37. 53.72. -0.02. 0.04. 0.00. 361169.06. 214065.84. 47.64. 361169.11. 214065.84. 47.64. -0.05. 0.01. -0.01. check7. 361346.92. 214322.33. 48.34. 361346.90. 214322.31. 48.34. 0.02. 0.02. -0.03. check8. 361491.32. 214744.21. 45.59. 361491.35. 214744.23. 45.55. -0.03. -0.02. 0.04. 0.04. 0.03. 0.02. 구분. RMSE. Journal of Cadastre & Land InformatiX Vol.50 No.1 (2020). 171.
(10) 임성하 ∙ 최규명 ∙ 조기성. Figure 9. TerraExplorer Pro(Skyline Co.). 상 등과 같은 레스터 데이터와 지적도, 지하시설물, 3 차원 건물모형, BIM(Building Information Modeling) 등과 같은 벡터 데이터를 동일한 좌표계에서 통합하 여 저장하고 분석할 수 있는 3차원 GIS기반 스마트시 트 응용시스템이며, 웹과 스마트기기 어플리케이션을 지원한다. 3차원 공간정보 인프라를 활용한 스마트시티 플랫. Figure 10. Underground facilities(water supply, sewerage) mesh-up. 폼은 디지털트윈과 다양한 IoT센서 등을 연계하여 행 정・대민서비스 분야에 폭 넓게 활용될 수 있다. 부동 산분야에서 부동산 거래 시 직접 가보지 않아도 스마 트시티 플랫폼에서 해당 부동산의 조망권을 분석할 수 있으며, 필지별로 건축허가 시 신축건물이 도시 미 관에 가져오는 경관과 고도제한 여부를 확인할 수 있 다. 또한 방범 및 소방분야에서 순찰경로와 화재진압 훈련을 모의실험할 수 있다. 공간정보기반 스마트시티 플랫폼이 구현되면 이처 럼 다양한 분야에 활용이 가능하며 다음의 몇 가지 사 례를 직접 구현하였다.. 4.1. 공간정보 매쉬업 지상뿐만 아니라 지하시설물도 스마트시티 플랫폼 에서 통합관리 해야 할 대상이며 구축된 모형에 지하 의 상・하수도 배관과 지상의 지적도의 형태・속성정보 를 매쉬업 하였다. 지하시설물인 상・하수도관을 지상구조물에 투영 (Projection)하여 지상 구조물과 비교하여 지하시설 물의 위치를 파악할 수 있었으며, 지상 드론 정사영상. 172. 「지적과 국토정보」 제50권 제1호. 2020. Figure 11. Cadastral map(Yellow line) mesh-up. 에 나타난 맨홀 등의 위치와 투영된 지하시설물을 비 교하여 지하시설물의 위치정확도를 평가할 수 있다. 또한 지적도 매쉬업을 통해 3차원 가상공간상의 지적 의 위치와 속성정보를 파악할 수 있다..
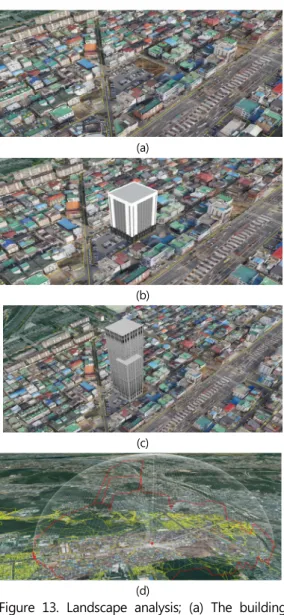
(11) 드론기반 도심지 디지털트윈 3차원 모형 구축에 관한 연구. (a). (a). (b). (b) Figure 12. Prospect right analysis; (a) Scene from a specific point of the first person, (b) Scene from a specific point (red: invisible area, green: visible area). 4.2 조망권 및 경관분석. (c). 공간정보기반 스마트시티 플랫폼에서 부동산 거래 시 사용자가 직접 현장에 가보지 않아도 해당 부동산 이 가지고 있는 조망권을 1인칭과 3인칭 시점에서 입 체적으로 확인할 수 있어 효율적인 부동산 거래가 이 루어질 수 있도록 지원하게 된다. Figure 12의 녹색은 특정시점에서 조망이 가능한 영역을 표시하며, 붉은 색은 그 시점에서 조망이 불가능한 영역을 표시한다. 신축건물이 들어설 예정지에 건물의 서로 다른 설 계안을 스마트시티 플랫폼에서 예정지에 가상으로 건. (d). Figure 13. Landscape analysis; (a) The building site, (b) Virtual building 1, (c) Virtual building 2, (d) Skyline when the virtual building is placed (red line). 설함으로써 준공 시 도시미관에 미치는 영향 등을 심 의 하는 지자체 경관심의에 대한 의사결정을 지원하. 4.3 일조권 분석. 게 된다. Figure 13는 주차장 부지에 건물이 신축되었 을 때 주변 3차원 경관에 미치는 영향을 사전에 파악 하는 화면이다.. 밀집된 도심지에서 신축건물에 의한 일조권 침해 는 도시가 가지는 문제점이라 할 수 있다. 일조권 침해에 관련된 기준은 건축법 시행령 제86 조 제3항 제2호에 의하면 일조권침해가 극대화되는 Journal of Cadastre & Land InformatiX Vol.50 No.1 (2020). 173.
(12) 임성하 ∙ 최규명 ∙ 조기성. (a) (a). (b) (b) Figure 15. Patrol route analysis; (a), (b) Realtime visible area along the patrol car's moving path (red: invisible area, green: visible area). 이 일조권에 영향을 받는 부분을 가시적으로 표현한 (c). 것이다. 태양이 가장 짧은 동짓날 기준 09:00~15:00 까지 빨간점은 80%이상, 노란점은 30%이하, 녹색점 은 10%이하의 신축건물에 의한 일조권 침해량을 나 타내고 있다. 이처럼 건물의 신축 전에 주변건물의 일 조권 침해량을 시뮬레이션 함으로써 신축 후 발생이 예상되는 민원을 사전에 방지할 수 있도록 지원할 수. (d) Figure 14. Right of light analysis; (a) The building site, (b) Virtual building, (c), (d) Right of light analysis result by new building (red point: more than 80% affected area, yellow point: less than 30% affected area, green point: less than 10% affected area). 있다.. 4.4 순찰경로 분석 범죄의 예방목적으로 주・야간 시간대의 경찰차의 순찰이 이루어지는데 스마트시티 플랫폼을 활용하 면 순찰경로 중 건물에 의한 폐색이 발생하지 않도. 동짓날 9시부터 15시까지 사이의 6시간 중 일조시간. 록 최적화된 경로 설정을 지원할 수 있다. Figure 15. 이 연속하여 2시간 이상 확보되어야 한다고 일조 침해. 는 순찰 이동경로 계획 시 해당 경로에서 보이는 부. 최소기준을 규정하고 있다. Figure 14은 유휴지에 가. 분은 녹색으로, 보이지 않는 부분은 붉은색으로 표. 상의 건물이 신축되었을 때 신축으로 인해 주변건물. 시하는 것을 나타낸다. 분석결과를 바탕으로 순찰. 174. 「지적과 국토정보」 제50권 제1호. 2020.
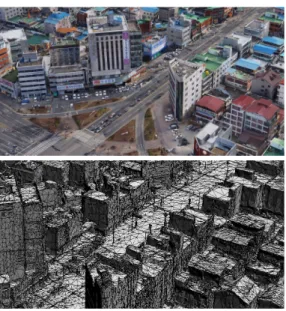
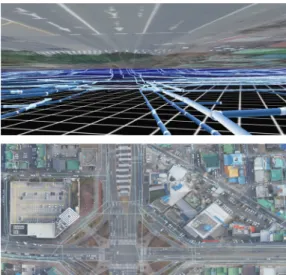
(13) 드론기반 도심지 디지털트윈 3차원 모형 구축에 관한 연구. 활동 시 건물이나 시설물에 가려 폐색이 최대한 발 생하지 않도록 최적화된 순찰경로 계획 수립을 하 는데 활용할 수 있다.. 4.5 화재진압 모의훈련 특정 시설물의 화재발생 시 소방차나 구급차의의. (a). 진입경로와 진압 위치, 건물내부에서 대비경로나 소 화전・소화기 위치 등을 스마트시티 플랫폼 내에서 시 뮬레이션 하여 모의 훈련을 지원할 수 있다. Figure 16은 건물 화재 시 소방차와 구급차 배치위 치 및 실내 대비 경로와 소화 시설 확인, 교통 통제 방 향 등을 사전에 모의하여 훈련할 수 있는 화면을 나타 내고 있다.. 5. 기존 구축방안과 비교. (b). 기존 구축방안과 비교를 위해 본 연구에서는 국토 교통부가 구축하여 운영 중인 브이월드(V-WROLD) 의 3차원 모형 구축 방법인 유인항공기 기반의 픽토메 트리(Pictometry) 기법과 본 연구에서 사용한 드론기 반 사진측량과의 정확도와 경제성을 비교하였다. Figure 17은 연구대상지를 픽토메트리 기법(위)으로. (c ). 구축한 모습과 드론사진측량 기법(아래)으로 구축한 모습을 나타내고 있다.. 5.1. 정확도 비교 기존 구축방안과의 정확도 비교를 위해 픽토메트리 기법관련 사전연구를 참조하였다. 송재열(2011)의 다 방향 경사영상을 이용한 대축척 수치지도 건물 레이 어 제작에 관한 연구에서 다방향 경사영상을 이용한 3 차원 모형 제작후 벡터데이터가 생성된 실험대상 지 역내에서 도화와 3차원 객체화가 동시에 수행된 40개. (d) Figure 16. Fire suppression simulation training (a), (b) Fire trucks and police cars deployment training in case of the building fire, (c), (d) Display of evacuation paths and fire extinguishing facilities using indoor maps. 지점의 x, y좌표를 획득하여 비교한 결과 최대오차가 x에서 0.261m, y에서 0.250m, z에서 0.275m로 나타. 났으며, RMSE는 x에서 0.124m, y에서 0.141m, z에서 Journal of Cadastre & Land InformatiX Vol.50 No.1 (2020). 175.
(14) 임성하 ∙ 최규명 ∙ 조기성. Table 9. Accuracy comparison with existing construction method. (a). Item. x(m). y(m). z(m). Remark. Manned aerial survey(A). 0.124. 0.141. 0.144 40 Point. Unmanned aerial survey(B). 0.030. 0.040. 0.020. Difference(A-B). 0.094. 0.101. 0.124. 8 Point. Table 10. Cost calculation result according to the construction area (money unit : thousand won) Area( ) Manned aerial survey. (b) Figure 17. Comparison with existing construction method. (a) 3D model based on Manned aircraft (Source: www.vworld.kr), (b) 3D model based on drone. Unmanned aerial survey. 0.25. 22,153. 3,572. 0.5. 24,479. 4,792. 1. 31,497. 7,088. 2. 39,055. 12,228. 4. 50,136. 22,504. 8. 64,089. 43,249. 16. 100,238. 86,230. 32. 149,238. 176,491. 64. 251,897. 373,131. 128. 424,176. 820,487. 0.144m의 결과를 나타내었다. 사전 연구 결과와 본 연 구에서 위치정확도 분석을 위해 사용한 Table 8의 검 사점 8점에 대한 RMSE의 차이를 비교한 결과 x 방향 으로 9.4cm, y 방향으로 10.1cm, z방향으로 12.4cm의 결과가 나타나 기존방식과 드론기반 방식의 정확도 차이는 x, y, z방향에서 10cm 내외가 됨을 알 수 있었 다. Table 9는 기존 구축방법과 위치정확도를 비교한 것이다.. 국토공간정보구축, 무인비행장치 측량 품셈을 참고하 여 단순비교를 하였다. 항공측량이 GSD 5cm급 촬영 은 아직 기술적으로 불가능하기 때문에 GSD 10cm급 을 드론사진측량은 GSD 5cm급 기준으로 경비, 재료 비, 체류비, 보험료, 기술료, 제경비 등을 제외하여 동 일 조건에서 대상 면적 증가에 따른 소요 비용 증가 추 세를 산출하였다. 무인비행장치 측량 품셈의 경우 현 재 고시된 품셈이 2차원 정사영상 및 수치도화를 위한. 5.2 경제성 비교. 품셈이기 때문에 수치도화 및 벡터화 공정을 제외하 였다. Table 10은 구축 면적에 따른 비용 산출 결과를. 기존 구축방법과의 경제성 비교를 위해서 2020년 기준 건설표준 품셈에 고시된 항공사진촬영과, 3차원. 176. 「지적과 국토정보」 제50권 제1호. 2020. 나타낸다..
(15) 드론기반 도심지 디지털트윈 3차원 모형 구축에 관한 연구. 드론기반 3차원 공간정보 구축의 최소 면적단위인. 였으며, 구축된 모형 간의 처리시간・품질・정확도 분. 0.25 로 산출된 구축비용은 기존 항공측량에 비교. 석을 통하여 활용성을 모색한 결과 다음과 같은 결론. 하여 약 16% 정도를 차지하는데 반해 구축면적이 넓. 을 얻을 수 있었다.. 어질수록 비율을 줄어들어 2 구축 시는 약 31%, 4. 첫째, 3차원 디지털트윈 모델 구축을 위해 사용된 3. 구축 시에는 약 45%까지 좁혀지는 것을 확인할. 종의 드론 사진측량 S/W의 처리시간과 품질을 분석. . . 한 결과 A사는 총 처리시간이 약 53시간이 소요되었. . 수 있었다. 또한 16 구축 시에는 86%까지 차지하 며 32 이상 구축 시에는 오히려 기존 항공측량 보. 으며, 중층 이상의 건물 모서리 등이 일그러지는 오류,. 다 많은 비용이 소모됨을 알 수 있다. 결론적으로 단순. 면 데이터에 구멍이 발생하여 구축 품질의 가장 낮게. 비교시 약 30 이하의 면적 대상을 드론사진측량. 나타났다. B사와 C사의 경우 처리시간이 각각 31시간,. 구축하였을 때 기존항공측량보다 경제성을 확보 할 수. 25시간이 소요되었으며, 구축 품질 면에서도 A사에. 있다고 판단된다.. 비교하여 폴리곤 오류가 적게 나타나 전체적으로 C사. . 의 S/W가 가장 우수한 결과를 나타냄을 알 수 있었다.. 6. 결론. 둘째, 구축된 디지털트윈 모델의 정확도를 분석한 결과 8점의 검사점에 대한 평균제곱근 오차(RMSE)는. 본 연구에서는 스마트시티 구성요소인 공간정보인. N방향으로 ±0.04m, E방향으로는 ±0.03m, Z방향으로. 프라 구축을 위해 최신 공간정보 취득 기술인 드론을. ±0.02m가 나타났다. 경계점좌표등록부시행지역의. 기반으로 도심지의 3차원 디지털트윈 모형을 구축하. 경계점에 대한 측량성과와 검사성과의 허용범위로 규. Table 11. 3D Geospatial information production estimating cost (standard of construction estimate) (Unit : 1 ) Surveyor. Work scop. Planning and work management. 3D db construction. Information Intermediate Processing Remark Intermed professional Advanced Beginner technician Engineer iate (map) 0.01. 0.16. . . . . Traffic data production. . 0.16. 0.4. 0.4. 0.08. 0.08. Facility data production. . 0.16. 0.32. 0.32. 0.08. 0.08. Water Resource data production. . 0.16. 0.24. 0.16. 0.08. 0.08. Quality inspection. 0.01. 0.16. . . . . Planning preparation. . 0.08. 0.16. . . . Production of visualization. Data acquisition and processing. (0.16). (0.32). (0.40). (0.40). (0.16). (0.16). information. Visualization data creation. 0.16. 0.4. 0.4. 0.4. 0.16. 0.16. Quality inspection. 0.01. 0.16. . . . . 0.01. 0.16. 0.16. . . . Summary inspection Sum. ( ) is External work. 0.2. 0.16. 1.68. 1.28. 0.40. 0.40. . (0.16). (0.32). (0.40). (0.40). (0.16). (0.16). . Journal of Cadastre & Land InformatiX Vol.50 No.1 (2020). 177.
(16) 임성하 ∙ 최규명 ∙ 조기성. Table 12. Unmanned aerial vehicle surveying estimating cost (standard of construction estimate) Number of people Item. Detailed work. technician. unit. engineer. ect. Remark. professi Advanc Interme Beginner Beginner laborer onal ed diate (Survey) Work planning. Work planning and preparation. 0.25. (0.50). (1.00). (1.00). . . . in-site survey. 0.25. . 0.5. 0.5. . . . Installation of Topographic contol point. 7 point. . 0.59. . . 0.59. . Topographic control point and ground plane control point ground control survey point survey altitude. 7 point. . 0.98. 1.05. 1.05. 1.82. 0.28. . (0.49). (0.56). (0.63). . . . 0.26. 1.2. 1.06. 1.06. 1.06. (0.12). (0.14). (0.32). . . . . . 1.13. 0.5. 1.13. . . shooting 0.25 Unmanned aerial photography Checking the photo and 0.25 organizing the results. . 0.19. 0.19. 0.19. . . . 0.20. . 0.20. . . . (0.20). . 0.20. . . . (0.60). (0.60). . . . (1.30). (1.30). . . . Preparations. 2km 0.25 . Aerial Triangulation. Aerial triangulation and 0.25 result clearance. Orthoimage production. DSM and Orthoimage production. 0.25. . Quality control and inspection. Quality Management. 0.25. 0.50. . . . . . Summary inspection. 0.25 . . . 0.50. . . . 3.47. 1.34. Sum. 0.50. 3.85. 3.94. 3.83. (0.62). (2.93). (3.78). (0.63). ( ) is Internal work. 정하고 있는 0.1m 미만으로 나타났으며, 항공사진측. 구현되는 분석모델 대비하여 3차원 모형에서 구현된. 량 작업규정의 1:500~1:600 축척의 사진기준점 오차. 분석모델의 활용성의 장점을 판단할 수 있었으며, 기. 한계인 표준편차 0.14cm 이내로 나타나서 지적과 항. 존 항공측량 방법과 비교해서 육안 판독지점에 대한. 공사진측량에서 규정하는 대축척의 오차 한계 모두. 정확도는 기존 항공측량보다 10cm 내외 더 정확하고,. 만족함을 알 수 있었다.. 약 30 이하의 구축 면적에서 기존 항공측량 보다. 마지막으로 드론기반의 3차원 도심지 디지털트윈. 구축 비용을 절감할 수 있을 것이라 판단할 수 있었다.. 모형을 이용한 스마트시티 구현의 활용성 증대를 위. 향후 구축모델의 품질향상과 다양한 활용모델 개발을. 해 본 연구에서 구축한 모형을 이용하여 조망권・경관. 위한 추가 연구가 지속적으로 이루어지기를 기대한다.. 분석, 일조권분석, 순찰경로분석, 화재진압 모의 훈련 등을 구현하였다. 이를 통해 기존 2차원 평면상에서. 178. 「지적과 국토정보」 제50권 제1호. 2020.
(17) 드론기반 도심지 디지털트윈 3차원 모형 구축에 관한 연구. 참고문헌. References. Geospatial Informatix Corporation. 송재열. 2011. 다방향 경사영상을 이용한 대축척 건물 레이어 제작에 관한 연구. 경기대학교 석사학위. 노홍석. 2018. 드론을 이용한 실시간 지하시설물도 작 성 연구. 동의대학교 공간정보시스템학과 석사학 위 논문. No HS. 2018. Real-time underground facility map. 논문. SONG JW.2011. Generation of the Building Layer of Large-scale Digital Map Using MultiOblique Image. Thesis for Master degree.. production using drone. Thesis for Master. Graduate. degree. Graduate Department of Spatial Infor-. Kyonggi University.. mation Engineering. Dong-Eui University. 유세종. 2018. 드론을 활용한 커튼월 건축물 항공 촬 영 및 3차원 모델 구축. 서울시립대학교 공간정보 학과. 석사학위 논문.. Department. of. Geoinformatics.. 최민식. 2018. 드론 사진측량 방법에 의한 도서(島嶼) 지역 수치지형도 제작의 효용성 연구. 인하대학 교 석사학위 논문. CHOI MS. 2018. A Study on the Effects of Deve-. YOU SJ. 2018. Aerial photographing and 3D modeling. lopment of Digital Mappng in the Island Areas. of transparent buildings using drones. Thesis for. Using the Drone Photogrammetry Method. Thesis. Master degree. Graduate Department of Spatial. for Master degree. Graduate Department of. Information University of Seoul.. Urban Planning. In-ha University.. 이병걸. 2018. 드론을 활용한 3차원 DSM 추출을 위한 연구. 한국지구과학학회 39(1):46-52. LEE BG. 2018. A Study of Three Dimensional DSM Development using Self-Developed Drone. The. Korean Earth Science Society. 39(1):46-52. 이성재. 2016. 고정익 무인항공기(드론)와 보급형 회 전익 무인항공기를 이용한 지형측량 결과의 비교. 한국암반공학회. 26(1):24-31. LEE SJ. 2016. Comparison of Topographic Surveying Results using a Fixed-wing and a Popular. DG Lowe. 1999. Object recognition from local. scale-invariant features. Proceedings of the Seventh IEEE International Conference on Computer Vision. ISBN: 0-7695-0164-8. Frost & sullivan. 2019. Smart Cities Frost&Sullivan Value Proposition. p. 2. M. Jarzabek-Rychard. 2016. Quality Analysis On 3D Building Models Reconstructed From UAV Imagery. ISPRS Journal of Photogrammetry and Remote Sensing, Volume XLI-B1.. Rotary-wing Unmanned Aerial Vehicle(Drone).. Noah Snavely. Steven M. Seitz. Richard Szeliski.. The Korean Society for Rock Mechanics and. 2006. Photo tourism: exploring photo collec-. Rock Engineering. 26(1):24-31.. tion in 3d. University of Washington.. 이재원. 2015. 공간정보 기반조성을 위한 무인비행장 치 작업규정・품셈 작성연구. 한국국토정보공사. LEE JW. 2015. Research on preparation of work rules. and assembly of drone for the creation of spatial information infrastructure. Korea Land and. Norzailawati Mohd Noor. 2019. 3D City Modeling Using Multirotor Drone For City Heritage Conservation. Journal of the Malaysian Insti-. tude of Planners. 17(1):338-349. Shreyansh Daftry. Christof Hoppe. and Horst Journal of Cadastre & Land InformatiX Vol.50 No.1 (2020). 179.
(18) 임성하 ∙ 최규명 ∙ 조기성. Bischof. 2015. Building with Drones: Accurate. 2020년 04월 29일 원고접수(Received). 3D Facade Reconstruction using MAVs. IEEE. 2020년 05월 08일 1차심사(1st Reviewed). International Conference on Robotics and. 2020년 05월 26일 2차심사(2st Reviewed). Automation (ICRA). ISSN: 1050-4729.. 2020년 06월 12일 게재확정(Accepted). Siyuan Chen. 2019. UAV Bridge Inspection Through Evaluated 3D Reconstructions. Journal of. Bridge Engineering. 24(4).. 초 록 본 연구에서는 스마트시티 구성요소인 공간정보인프라 구축을 위해 최신 공간정보 취득 기술인 드 론을 기반으로 도심지의 3차원 디지털트윈 모형을 구축하였으며, 구축된 모형 간의 처리시간・품질・정 확도 분석과 스마트시티 응용시스템을 활용하여 몇 가지 분석 모델을 구현하였다. 3종의 드론 사진측 량 소프트웨어의 데이터 처리시간・품질이 각각 다르게 나타난 반면 구축 모델의 정확도는 8점의 검사 점에 대한 평균제곱근 오차(RMSE)는 N방향으로 ±0.04m, E방향으로는 ±0.03m, Z방향으로 ±0.02m로 경계점좌표등록부시행지역의 경계점에 대한 측량성과와 검사성과의 허용범위로 규정하고 있는 0.1m 미만으로 나타났으며. 항공사진측량 작업규정의 1:500~1:600 축척의 사진기준점 오차 한계인 표준편 차 0.14cm 이내로 나타나서 지적과 항공사진측량에서 규정하는 대축척의 오차 한계 모두 만족함을 알 수 있었다. 또한 드론기반의 3차원 도심지 디지털트윈 모형을 이용한 스마트시티 구현의 활용성 증대를 위해 본 연구에서 구축한 모형을 이용하여 조망권・경관분석, 일조권분석, 순찰경로분석, 화재 진압 모의 훈련 등을 구현하였으며, 기존 항공측량 방법과 비교해서 육안 판독지점에 대한 정확도는 기존 항공측량 보다 10cm 내외 더 정확하고, 약 30 이하의 구축 면적에서 기존항공측량 보다 구축 비용을 절감할 수 있을 것이라 판단할 수 있었다. 주요어 : 드론, 스마트시티, 디지털트윈, 3차원 건물 모델, 사진측량. 180. 「지적과 국토정보」 제50권 제1호. 2020.
(19)
수치

+7


관련 문서
The following sections describe mainly four different aspects of the bibliometric analysis and science mapping combined: (i) Breakdown of publications to departments and the
세계물동량의 감소로 세계 해운시장이 불황을 겪고 있을 때 가장 먼저 해양플랜트 건조 시장에 뛰어 들어 지금까지 해양플랜트 건조 부문 세계 1위를 유지하고
• 한국심리검사연구소에서 새롭게 개선된 학회 홈페이지의 서버를 임대해 주셨고, 학회 홍보 이메일 발송을 도와 주셨 습니다. 감사합니다.. • 한국MBTI연구소에서 학회
·베트남: 베트남 국영석유회사의 자회사인 'PVEP'는 미얀마 민간기업인 '에덴그룹'과 미얀마의 마르타반만 지역에서 유전
입학지원서 기재내용은 정확히 입력하여야 하며, 기재의 착오, 허위증명서의 제출 등 부정 한 방법으로 합격 또는 입학한 사실이 확인될 경우에는 입학한 후에라도
전문대학 수시모집 합격자는 다른 모집 시기에 실시하는 대학·산업대학·교육대학 또는 전문대학의 모집에 지원할 수 없으며, 대학·산업대학 및 교육대학의
This study evaluates China’s and India’s recent efforts in global environmental governance with a focus on climate change negotiations linking their constructive position
Sulfonate Anion : 매우 약염기, 안정된 음이온 → 좋은 이탈기. O─H 결합의 끊어짐이 발생하나 C─O 결합에는 영향이 없음
