Korean Journal of Remote Sensing, Vol.34, No.6-2, 2018, pp.1251~1260
http://dx.doi.org/10.7780/kjrs.2018.34.6.2.9 ISSN 1225-6161 ( Print )
ISSN 2287-9307 (Online)
Article
고품질 해빙표면모델 생성을 위한 정합비용함수의 성능 비교 분석
김재인 1)·김현철 2)†
Performance Comparison of Matching Cost Functions for High-Quality Sea-Ice Surface Model Generation
Jae-In Kim
1)·Hyun-Cheol Kim
2)†Abstract: High-quality sea-ice surface models generated from aerial images can be used effectively as field data for developing satellite-based remote sensing methods but also as analysis data for understanding geometric variations of Arctic sea-ice. However, the lack of texture information on sea- ice surfaces can reduce the accuracy of image matching. In this paper, we analyze the performance of matching cost functions for homogeneous sea-ice surfaces as a part of high-quality sea-ice surface model generation. The matching cost functions include sum of squared differences (SSD), normalized cross- correlation (NCC), and zero-mean normalized cross-correlation (ZNCC) in image domain and phase correlation (PC), orientation correlation (OC), and gradient correlation (GC) in frequency domain. In order to analyze the matching performance for texture changes clearly and objectively, a new evaluation methodology based on the principle of object-space matching technique was introduced. Experimental results showed that it is possible to secure reliability and accuracy of image matching only when optimal search windows are variably applied to each matching point in textureless regions such as sea-ice surfaces.
Among the matching cost functions, NCC and ZNCC showed the best performance for texture changes.
Key Words: Sea ice, Digital surface model, Aerial image, Matching cost
요약 : 항공영상으로 제작한 고품질의 해빙표면모델은 인공위성 기반 원격탐사 기술 개발을 위한 현장자료 뿐만 아니라 북극 해빙의 정밀한 형상학적 변동 특성 분석에도 효과적으로 사용될 수 있다. 그러나 해빙 표면 의 부족한 텍스쳐 정보는 영상정합을 어렵게 만드는 요인으로 작용한다. 이에 본 논문에서는 고품질 해빙표면 모델 생성을 위한 일환으로 균질한 해빙 표면에 대한 정합비용함수들의 성능 비교 분석을 수행한다. 정합비용 함수로는 영상 도메인의SSD(sum of squared differences), NCC(normalized cross-correlation), ZNCC(zero-mean normalized cross-correlation), 주파수 도메인의 PC(phase correlation), OC(orientation correlation), GC(gradient correlation)를 분석하였다. 텍스쳐 정보량에 따른 정합 성능을 보다 명확하고 객관적으로 분석하기 위해 객체
Received November 19, 2018; Revised December 13, 2018; Accepted December 17, 2018; Published online December 24, 2018
1)
극지연구소 북극해빙예측사업단 박사후연구원 (Postdoctoral Research Fellow, Unit of Arctic Sea-ice Prediction, Korea Polar Research Institute)
2)
극지연구소 북극해빙예측사업단 책임연구원 (Principal Researcher, Unit of Arctic Sea-ice Prediction, Korea Polar Research Institute)
†Corresponding Author: Hyun-Cheol Kim ([email protected])
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License
(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in
any medium, provided the original work is properly cited.
1. 서 론
북극 해빙에 대한 정보는 북극의 기후변화 예측과 북 극 항로 개척을 이유로 매우 중요하게 다뤄진다 (Vihma, 2014; Aksenov et al., 2017). 일반적으로 해빙 정보 산출에 는 인공위성 자료를 이용한 원격탐사 기술이 널리 활용 되고 있다 (Karvonen et al., 2012). 이는 해빙이 북극 전역 에 걸쳐 광범위하게 분포하고 있기 때문이다 . 그러나 인 공위성 기반 원격탐사를 통해 산출 가능한 해빙 정보는 농도 , 면적 등으로 다소 제한적이다. 이는 원격탐사 기 술 개발에 있어 정확한 현장 검증자료가 요구된다는 점 이 크게 작용한다 (Tschudi et al., 2008). 북극의 혹독한 날 씨와 한정된 인력은 현장 관측에 의한 자료 획득을 매 우 어렵게 만든다 .
현장 관측에 의한 자료 획득의 어려움으로 인해 최근 에는 유 /무인 항공기를 이용한 자료 획득 방식이 고려 되고 있다 (Hagen et al., 2014; Divine et al., 2016). 이러한 방 식은 직접적인 현장조사와 비교하여 광역적이고 조밀 한 현장자료 획득이 가능하다 . 또한 광학위성과는 달리, 구름에 의한 제약이 없고 자료 획득시기 선정에도 유연 한 장점을 가진다 . 특히, 항공영상으로 얻을 수 있는 해 빙의 수치표고모델은 해빙의 다양한 정보를 산출하기 위한 인공위성 기반 원격탐사 기술 개발은 물론 해빙의 정밀한 형상학적 변동 특성 분석에도 효과적으로 사용 될 수 있다 . 그러나 문제는 해빙이 눈과 얼음으로 뒤덮 여 있기 때문에 표면에 텍스쳐 정보가 극히 부족하다는 점이다 . 이러한 해빙의 표면 특성은 수치표고모델 생성 을 위한 영상정합을 어렵게 만든다 (Veksler, 2003).
이에 본 논문에서는 고품질 해빙표면모델 생성의 일 환으로 여러 정합비용함수들의 성능을 비교 분석한다 . 물론 , 정합비용함수들의 성능은 기존에 이미 많은 연구 가 이루어진 바 있다 (Hirschmuller and Scharstein, 2009;
Heid and Kaab, 2012). 그러나 기존 연구들은 주로 텍스 쳐 정보가 많은 지표 또는 대상에 초점을 맞추어 성능
분석이 이루어졌다. 따라서 본 논문에서는 해빙 표면의 특성을 고려하여 텍스쳐 정보량 부족에 대한 강인성에 초점을 맞추어 분석을 수행한다. 또한 텍스쳐 정보량에 따른 정합 성능을 보다 명확하고 객관적으로 분석하기 위해 객체공간 기반 정합기법의 원리를 바탕으로 하는 새로운 평가 방법을 제시하고자 한다 .
2. 실험자료
1) 항공영상 자료
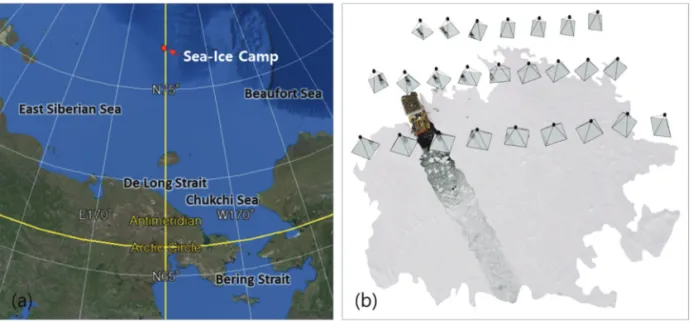
성능분석을 위한 영상 자료로는 2017년도 8월, 동시 베리아해와 보퍼트해 사이에서 이루어진 북극 해빙 현 장조사 (북위 77.5879°, 동경 179.2901°)를 통해 취득한 드론 영상 25장을 사용하였다. Fig. 1은 해빙 현장조사 위치와 영상 촬영 지점들을 나타낸 것이다. 영상 촬영 에 사용된 카메라는 DJI Phantom 4에 탑재된 FC330으 로써, 영상 크기 4000(3000, 초점거리 3.6 mm, 화소 크기 1.58 µm의 제원을 가진다.
본 논문에서 정합비용함수들의 비교 분석은 객체공 간 기반 정합 기법의 원리를 바탕으로 성능을 측정하여 이루어지기 때문에 각 영상의 내부 및 외부 표정요소가 요구된다 . 일반적으로 영상들의 표정요소는 대응점과 지상기준점 모두를 이용하여 번들블록조정을 통해 추 정돼야 한다 . 그러나 해빙은 끊임없이 바다 위를 움직 이고 있기 때문에 지상기준점을 이용한 정밀 지오레퍼 런싱은 현실적으로 이루어지기 어렵다 . 이에 본 논문에 서는 영상들 사이의 대응점만을 이용하여 영상 표정을 수행하였다 . 영상의 표정 작업은 드론 영상처리전문 소 프트웨어 Pix4D(ver. 4.1.24)를 이용하였다.
2) 해빙표면모델 자료
정합비용함수의 성능분석에는 영상들의 표정요소
와 더불어 정확한 3차원 객체점 또한 필요하다. 드론 영
공간 기반 정합 기법의 원리를 바탕으로 하는 새로운 평가 방법을 도입하였다. 실험결과는 해빙 표면과 같이 텍스쳐 정보가 희박한 지역에 대해서는 정합 지역에 따라 적합한 크기의 탐색창을 가변적으로 적용해야만 정 합의 신뢰성 및 정확도 확보가 가능함을 보여주었다. 정합비용함수들 사이에서는 NCC와 ZNCC가 텍스쳐 정 보 변화에 대해서 가장 우수한 성능을 나타냈다.상으로 생성한 해빙표면모델은 부족한 텍스쳐 정보에 기인하여 많은 오정합점들을 내포할 수 있다 . 이 때문 에 분석을 위한 객체점 선정은 동일 시기에 취득된 레 이져 스캐너 포인트클라우드 자료를 이용하여 이루어 졌다 . 포인트클라우드 취득에 사용된 스캐너는 FARO Focus3D X130 제품으로 적용 거리 0.6~130 m, 정밀도 2 mm, 수직 범위 300°, 수평 범위 360°의 제원을 가진다.
Fig. 2는 스캐너 운영 작업과 포인트클라우드의 격자화 로 취득한 해빙표면모델을 보여준다 .
분석점의 높이값을 스캐너 해빙표면모델로부터 대 체하기 위해서는 먼저 영상의 외부표정요소가 정의된 좌표계와 해빙표면모델이 정의된 좌표계를 서로 일치
시키는 작업이 필요하다 . 이를 위해 드론 모자이크 영 상과 스캐너 모자이크 영상 사이에 대응점을 추출하여 좌표계 정렬을 수행하였다 . 대응점은 총 10점이 사용되 었으며 , 그에 따른 3차원 변환오차는 X, Y, Z축 각각에 대해서 약 0.04, 0.03, 0.04 m로 나타났다.
3. 성능분석 방법
영상정합의 정확도는 적용한 정합비용함수와 탐색 창 크기에 좌우된다 . 정합비용함수는 대상지역의 표면 특성에 높은 분별력을 가져야 하며, 탐색창은 내부에 표
Fig. 2. (a) Laser scanner operation and (b) sea-ice surface model from scanner point cloud.
Fig. 1. (a) Location of sea-ice camp and (b) image acquisition position on the sea-ice.
고 변이가 발생하지 않는 선에서 충분히 많은 텍스쳐 정 보를 포함할 수 있도록 크게 설정되어야 한다 . 이러한 배경으로 본 논문에서는 텍스쳐 정보량 변화에 대한 여 러 정합비용함수들의 성능을 비교 분석한다 . 텍스쳐 정 보량은 정합을 위한 탐색창의 크기를 다르게 적용함으 로써 조절된다 . 정합 정확도는 사전에 정의한 정합 오 차 지표를 이용하여 측정된다. 그런 다음에는 탐색창 크 기별 정합 오차 측정 결과를 바탕으로 정합에 요구되는 최소 크기의 탐색창 (또는 최적 탐색창)을 규정한다. 즉, 텍스쳐 정보량에 대한 정합 성능 분석은 최적 탐색창 크 기에서 측정된 정합 오차 비교를 통해 이루어지게 된다 . 본 장에서는 분석할 정합비용함수, 오차 지표 측정 방법, 그리고 최적 탐색창 결정 방법에 대해 기술한다 .
1) 정합비용함수정합비용함수는 두 영상 사이의 유사성을 나타내는 지표로써 영상 도메인 방식과 주파수 도메인 방식으로 분류할 수 있다 . 영상 도메인 지표들은 시차맵(disparity map) 또는 수치표고모델(digital surface model) 생성에 주 로 사용되며 , 주파수 도메인 지표들은 영상등록(image registration)에 주로 사용된다. 본 논문에서는 각 도메인 의 대표적인 몇가지 정합비용함수에 대해 성능을 비교 한다 .
영상 도메인에서는 SSD(sum of squared differences), NCC(normalized cross-correlation), ZNCC(zero-mean normalized cross-correlation)가 고려된다. SSD는 M(N 크기의 두 패치영상에 대해 동일 위치에 놓인 화소값의 차이를 제곱하고 이들을 모두 더해 유사성을 표현한다 . 따라서 SSD는 0에 가까울수록 높은 유사도를 가진다.
그러나, 일반적으로 SSD는 두 패치영상 사이의 명암 (contrast) 및 밝기(constant offset)의 차이와 잡음에 민감 하다고 알려져 있다 . SSD를 수식으로 표현하면 다음 식 (1)과 같다. 여기서 f
i와 g
i는 두 패치영상 f, g, 각각에 대
한 i번째 화소값을 의미한다.
MN
SSD = ∑ (f
i– g
i)
2(1)
i=1
반면, NCC는 정규화를 통해 명암 차이와 잡음에 대 해 불변성을 가진다 . 이런 이유로, NCC는 정합비용함 수로서 널리 사용되고 있다 . NCC는 1에 가까울수록 높
은 유사도를 가진다 . 다음은 NCC를 수식으로 나타낸 것이다 .
∑
i=1MNf
ig
iNCC = ——————— (2)
∑
i=1MNf
i2∑
i=1MNg
i2ZNCC는 NCC로 해결할 수 없는 밝기 차이에 의한 영향까지 완화시켜준다 . 따라서, ZNCC는 두 패치영상 사이의 명암과 밝기의 차이 , 그리고 잡음에 대해 불변 성을 가진다고 할 수 있다 . ZNCC 역시도 1에 가까울수 록 높은 유사도를 가진다 . 다음의 식(3)은 ZNCC를 나타 낸 것이다. 여기서 f–, g–는 두 패치영상 각각의 화소값 평 균을 의미한다.
∑
i=1MN(f
i– f–) (g
i– g–)
ZNCC = ——————————— (3)
∑
i=1MN(f
i– f–)
2∑
i=1MN(g
i– g–)
2주 파 수 도 메 인 에 서 는 PC(phase correlation), OC (orientation correlation), GC(gradient correlation)가 고려 된다. PC는 주파수 도메인에서의 NCC로 간주할 수 있다.
주파수 도메인에서 CC(cross-correlation)는 푸리에 추이 정리 (Fourier shift theorem)를 바탕으로 두 영상 각각의 푸리에 변환 (Fourier transform)들을 곱하여 얻을 수 있다 (Reddy and Chatterji, 1996). 이때, PC는 진폭(amplitude)의 영향을 상쇄시켜 위상 정보만을 고려함으로써 정규화 의 목적을 달성한다 . 이는 식 (4)와 같이 나타낼 수 있다.
여기서 F와 G는 영상 f와 g 각각의 푸리에 변환, *표시
는 켤레 복소수 , IFFT는 역푸리에 변환(inverse Fourier transform)을 의미한다.
FG
*PC = IFFT ( ——– | FG
*| ) (4) OC는 영상의 화소값이 아닌 그래디언트 영상의 방 향 성분을 이용한다 (Fitch et al., 2002). 즉, OC는 식(5)와 같이 변환된 그래디언트 방향영상 (orientation image)을 이용하여 식 (7)과 같이 유사도를 산출한다. 여기서 sgn 는 식(6)과 같은 부호함수(signum function), i는 허수부 를 의미한다.
∂f ∂f ∂g ∂g
f
o= sgn ( —– + i —– ∂x ∂y ) , g
o= sgn ( —– + i —– ∂x ∂y ) (5)
0 if | x | = 0
f
o= sgn { x otherwise (6) —– | x |
OC = IFFT(F
oG
o*) (7)
OC는 식 (7)에서 볼 수 있듯이 주파수 진폭의 영향을 제거하지 않는다 . 이는 방향영상을 생성하는 과정에서 이미 정규화가 이루어지기 때문이다 . 만약, 두 종류의 정규화를 모두 적용할 경우 , 오히려 신호 특성의 손실 이 발생할 수 있다 (Heid and Kaab, 2012).
GC는 OC와는 다르게 영상의 그래디언트 성분을 이 용한다 (Argyriou and Vlachos, 2003). 그래디언트 영상으 로의 변환은 식 (8)과 같으며, 유사도는 OC와 동일하게 식 (9)와 같이 계산된다.
∂f ∂f ∂g ∂g
f
t= —– + i —–, g ∂x ∂y
t= —– + i —– (8) ∂x ∂y GC = IFFT(F
tG
t*) (9)
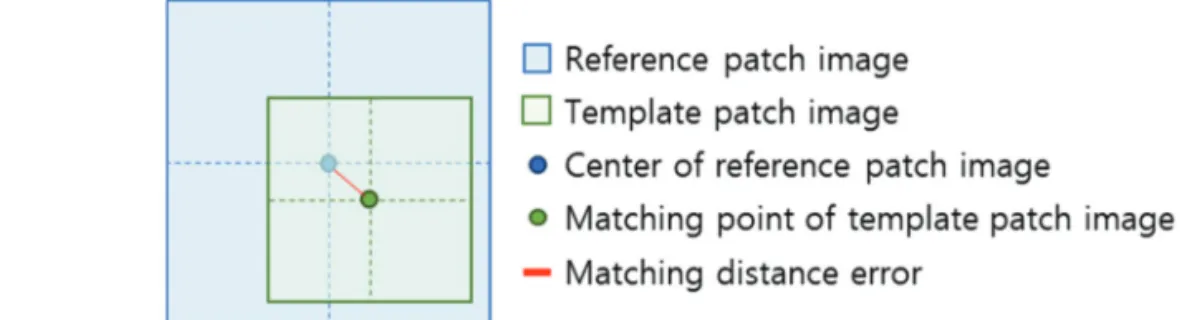
2) 정합거리오차주어진 3차원 객체점이 참값이라면, 이에 대한 영상 별 역투영점은 모두 동일 지점을 나타내야 한다 . 이는 객체공간 기반 정합 기법의 기본 원리에 해당한다 . 따 라서 이상적으로는 역투영점을 중심으로 각 영상별 패 치영상을 추출하고 , 상호간에 영상정합을 수행한다면, 최대 유사도를 나타낸 지점들은 패치영상의 중심점과 일치해야 한다 . 그러나 실제 정합된 지점과 패치영상의 중심점 사이에는 거리 오차가 발생할 수 있다 . 이는 패 치영상 (또는 탐색창)의 크기와 정합비용함수의 특성에 기인한다 . 본 논문에서 이와 같이 산출된 오차를 정합 거리오차라 정의한다. 이 오차 지표를 이용하면 참값의 객체점과 특정 크기의 패치영상들이 주어졌을 때, 정합 비용함수들 사이의 객관적인 성능 비교가 가능해진다.
Fig. 3은 정합거리오차의 개념를 도식화 한 것이다.
정합거리오차는 정합영상 검색, 기준영상 결정, 패치 영상 생성, 정합점 추출 단계를 거쳐 측정된다. 정합영 상 검색 단계에서는 공선조건 (collinearity condition)을
이용하여 주어진 객체점이 촬영된 모든 영상들을 검색 한다. 이들 영상은 이후 정합영상으로 명명한다.
기준영상 결정 단계에서는 검색된 영상들 중에서 정 합의 기준을 결정한다 . 일반적으로 영상 정합이 제대로 이루어지기 위해서는 두 영상 사이에 기복 변위 (relief displacement)의 차이가 작아야 한다. 따라서 기준영상 은 주어진 객체점 상공에서 가장 연직 촬영된 영상으로 선정하는 것이 가장 적합할 것이다 . 이런 조건에 부합 하는 영상을 찾기 위해 객체점(P), 지상 주점(M), 지상 연직점 (N)으로부터 식 (10)과 같이 비용함수를 정의하 였다 .
d
i= | P —
i→ M
i| + | — P
i→ N
i| (10) 여기서 P —
i→ M
i과 — P
i→ N
i은 객체점에 대한 카메라의 자세 및 위치와 밀접한 관계를 가진다 . 즉, P —
i→ M
i과 P —
i→ N
i가 작 아질수록 객체점에 대한 영상의 정사투영성은 높아진다 . 따라서 기준영상은 식 (10)의 결과를 최소화 시키는 영 상으로 결정할 수 있다 . Fig. 4는 기준영상 결정에 필요 한 객체점, 지상 주점, 지상 연직점 사이의 관계를 보여 준다 .
패치영상 생성 단계에서는 각 영상별로 정합에 사용 할 패치영상을 생성한다 . 패치영상은 주어진 객체점을 중심으로 그리드 평면을 설정하고 , 각 그리드마다 화소 값을 역투영하여 생성된다. 따라서 모든 패치영상들의 방향과 축척은 근사적으로 동일하다 . 이때, 기준 패치영 상은 템플릿 패치영상 보다 더 넓은 영역에 대해서 생 성된다 (Fig. 3 참조).
마지막 정합점 추출 단계에서는 기준 패치영상에 대 해서 템플릿 패치영상들의 정합점을 추출한다. 정합점 은 기준 패치영상 위에서 moving window 방식으로 유사 도를 측정할 때 , 템플릿 패치영상과의 유사도가 최대인
Fig. 3. Definition of matching distance error.
지점으로 결정한다 . 즉, 기준 패치영상은 탐색영역, 템 플릿 패치는 탐색창으로 간주된다 . 정합 거리 오차는 기 준 패치영상의 중심점과 템플릿 패치영상별로 추출된 정합점들 사이의 이격거리를 모두 평균하여 계산한다 .
3) 최적 탐색창 결정최적 탐색창은 영상정합의 신뢰성이 보장되는 최소 크기의 탐색창 (또는 템플릿 패치영상)을 의미한다. 본 논문에서 최적 탐색창은 정합거리오차 기준과 정합 신 뢰성 기준을 동시에 만족하는 가장 작은 크기의 탐색창 으로 결정한다. 정합거리오차 기준과 정합 신뢰성 기준 은 참값의 객체점들을 분석하여 결정한다.
정합거리오차의 기준은 탐색창의 크기를 늘려가며 오차를 측정했을 때 , 객체점별 오차의 최소값들이 가지 는 통계 분포에서 3σ에 해당하는 값으로 결정한다.
정합의 신뢰성 기준은 탐색창과 함께 탐색영역의 크 기 또한 늘려가며 정합거리오차를 측정했을 때 , 각 탐 색창에서 탐색영역 크기별로 발생하는 정합거리오차 의 변동성으로부터 결정한다 . 이는 영상정합의 신뢰성 이 보장되도록 적절한 탐색창 크기가 적용된다면 , 탐색
영역의 크기가 변하더라도 매번 동일한 정합 결과를 나 타내야 한다는 가정을 전제로 한다 . 따라서 정합 신뢰 성 기준은 정합거리오차의 표준편차들에 대한 제 3 사 분위수 (Q3)와 사분위수 범위(inter quantile range, IQR) 로부터 Q3 + 1.5 × IQR로 결정하였다.
4. 성능분석 결과
정합비용함수들의 성능분석을 위해 좌표계가 일치된 드론 모자이크 영상과 스캐너 해빙표면모델을 이용하 여 총 20점의 분석점을 추출하였다. 드론 모자이크 영상 의 육안분석을 통해 분석점들은 상대적으로 텍스쳐가 많은 지역과 적은 지역으로 구분되어 추출되었다 . 1~9 번 분석점은 텍스쳐가 많은 지역에서 추출되었으며 , 10~20번 분석점은 텍스쳐가 희박한 지역에서 추출되 었다 . Fig. 5는 대상영역에서 추출된 전체 분석점들을 보 여주며 , Fig. 6은 텍스쳐 정보량이 다른 분석점들의 예시 를 보여준다 .
20개 분석점에 대해 정합비용함수별로 최적 탐색창
Fig. 4. Relationship between the object point, ground principal point, and ground nadir points.
크기를 도출하였다 . Fig. 7은 각 분석점별 최적 탐색창 도출 결과를 보여주며 , Table 1은 텍스쳐 정보량에 따라 분석점을 나누어 최적 탐색창 크기의 평균을 계산한 것 이다 .
실험결과에서 최적 탐색창의 크기는 텍스쳐 정보가 상대적으로 적은 지점들(10~20번점)에서 더 크게 나타
났다 . 이는 신뢰성 있는 영상정합을 위해서는 정합지점 의 텍스쳐량을 고려하여 가변적으로 적절한 크기의 탐 색창을 적용해야 함을 보여준다 .
다음 Fig. 8은 각 분석점별 최적 탐색창 크기에서의 정합거리오차 측정 결과이며 , Table 2는 텍스쳐 정보량 에 따라 분석점을 나누어 정합거리오차의 평균을 계산
Fig. 6. Examples of textured (top) and textureless (bottom) points.
Fig. 5. Analysis points extracted for performance evaluation.
한 것이다 .
실험결과에서는 최적 탐색창 도출 결과에서와는 달 리 텍스쳐 정보량에 따른 차이가 관측되지 않았다 . 이 는 적절한 크기의 탐색창이 적용된다면 일관적인 영상 정합 정확도 확보가 가능함을 보여준다 . 따라서 위의 두
실험결과를 종합해 보면 , 영상정합의 신뢰성 및 정확도 모두를 확보하기 위해서는 정합지점의 텍스쳐 정보량 을 고려하여 가변적으로 탐색창 크기를 적용해야 한다 는 결론을 도출할 수 있다 .
영상 도메인과 주파수 도메인의 정합비용함수 비교
Fig. 8. Matching distance errors at the optimal window sizes for the analysis points.
Table 1. Mean optimal window sizes for the analysis points (unit : pixels)
Points SSD NCC ZNCC PC OC GC
MeanAll 39 26 29 42 53 41
Mean01-09 25 15 17 16 22 16
Mean10-20 51 36 38 64 78 61
Table 2. Mean matching distance errors for the analysis points (unit : pixels)
Points SSD NCC ZNCC PC OC GC
MeanAll 1.40 1.54 1.48 1.41 1.58 1.35
Mean01-09 1.45 1.54 1.50 1.39 1.55 1.36
Mean10-20 1.36 1.54 1.47 1.43 1.61 1.34
Fig. 7. Optimal window sizes derived for the analysis points.
에 있어서는 영상 도메인의 정합비용함수들이 더 작은 탐색창 크기를 나타냈다 . 이는 주파수 도메인 정합비용 함수들의 정합 특성에 기인한 것으로 판단된다 . 주파수 도메인 정합비용함수는 영상을 주파수 성분으로 변환 하고 모든 주파수 성분에서 가장 우세하게 나타나는 위 상 차이를 바탕으로 정합점을 결정한다 . 그러나 문제는 텍스쳐 정보가 적은 해빙 표면의 경우 , 저주파 성분들 위주로 구성된다는 점이다 . 이는 영상 잡음이 푸리에 변 환 결과에 side effect를 증폭시킴으로써 결과적으로 부 정확한 정합 결과를 유발할 수 있게 만든다 . 이 때문에 주파수 도메인 비용함수들은 푸리에 변환 결과의 신뢰 성 확보를 위해 영상 도메인 정합비용함수들과 비교하 여 더 큰 탐색창이 요구되었을 것으로 판단된다.
한편, NCC와 ZNCC는 텍스쳐 정보량이 많은 지점과 적은 지점 모두에서 다른 정합비용함수들과 비교하여 가장 작은 크기를 나타냈다 . 또한 텍스쳐 정보량이 많 은 지점들과 적은 지점들 사이에 탐색창 크기의 증가 폭 또한 가장 작게 나타났다 . 그런 반면, 최적 탐색창에서 의 영상정합 정확도는 정합비용함수들 사이에서 큰 차 이를 발견할 수 없었다 . 이는 NCC 및 ZNCC가 텍스쳐 정보가 적은 표면에 대해 높은 분별력을 가질 수 있음 을 보여준다 .
또한 , 본 연구에서는 NCC와 ZNCC의 결과 차이가 극히 작게 나타났다 . 이는 분석에 사용한 드론 영상이 단시간 동안에 취득 됨에 따라 서로간에 gain과 offset 차 이가 적었기 때문이라 판단된다 . 이는 한편으로 SSD의 성능 저하의 원인이 주로 영상 잡음에 기인했음을 보여 주는 결과라고도 할 수 있다 . 따라서 해빙표면모델 생 성을 위한 영상정합 측면에서는 영상 도메인의 NCC와 ZNCC가 가장 효과적이라 판단되며, 연산 효율성까지 고려한다면 이들 중에서는 NCC가 가장 우수하다고 할 수 있을 것이다.
5. 결 론
본 논문에서는 다중 항공영상으로부터 고품질의 해 빙표면모델을 생성하기 위한 일환으로 여러 정합비용 함수들의 성능을 비교 분석하였다 . 성능 분석은 해빙 표면의 특성을 고려하여 텍스쳐 정보량 부족에 대한 강
인성에 초점을 맞추었다 . 텍스쳐 정보량에 따른 정합 성능을 보다 명확하고 객관적으로 평가하기 위해 정합 거리오차 측정 방법과 최적 탐색창 결정 방법을 도출하 였다 . 성능분석 실험결과에서 최적 탐색창의 크기는 텍 스쳐 정보량이 적은 지점들에서 상대적으로 더 크게 측 정된 반면 , 이 때의 정합거리오차는 텍스쳐 정보량에 상 관없이 서로 유사하게 나타났다 . 이 결과는 해빙표면과 같이 텍스쳐 정보량이 희박한 지역에 대해서는 정합지 역에 따라 적합한 크기의 탐색창을 가변적으로 적용해 야 정합의 신뢰성 및 정확도 확보가 가능함을 보여준다 . 영상 도메인과 주파수 도메인 정합비용함수들 사이의 비교에서는 영상 도메인 정합비용합수들이 정합 정확 도 저감없이 더 작은 크기의 최적 탐색창을 나타냈다 . 특히 , NCC와 ZNCC는 다른 정합비용함수들 보다 월등 히 뛰어난 성능을 나타냈다 . 이는 적은 텍스쳐량에 대 한 NCC와 ZNCC의 높은 분별력을 보여준다. 본 논문 의 분석결과는 텍스쳐 정보량이 적은 빙권지역을 대상 으로 하는 영상정합 기반 활용연구에 있어 정합비용함 수 선정과 최적 탐색창 도출에 기여할 수 있을 것이다 . 특히, 본 논문의 성과는 고품질 해빙표면모델 생성 방법 을 개발함에 있어 이론적 및 기술적으로 중요한 토대가 될 수 있을 것이다. 따라서 향후 연구에서는 본 논문의 방법론과 분석결과를 바탕으로 가변적 탐색창을 이용 한 고품질 해빙표면모델 생성 방법을 연구할 계획이다.
사 사
본 연구는 극지연구소의 북극 해빙 위성관측을 위한 분석 기술 개발 (PE18120) 연구과제의 지원으로 수행되 었습니다 .
References