構 造 工 學
大 韓 土 木 學 會 論 文 集第28卷 第5A 號·2008年 9月 pp. 657 ~ 664
Sag가 고려된 사장교 케이블의 진동저감을 위한 Movable Anchorage 시스템
Movable Anchorage System for Mitigation of Cable Vibration in Cable-Stayed Bridges with Sag
황인호*·박준형**·이종세***
Hwang, Inho · Park, Jun Hyung · Lee, Jong Seh
···
Abstract
Rain-wind induced cable vibration can cause the damages in the cable-stayed bridge due to very little inherent damping char- acteristics and low fundamental frequency. External Dampers attached to stay cables near anchorages have been shown to be effective means at short stay-cables. However, installation locations of external dampers are limited to a particular range due to aesthetic and practical reasons for very long stay-cables. A recent study by the authors showed that the stay-cable vibration sys- tem can perform better than the optimal passive viscous damper, thereby demonstrating its applicability in large cable-stayed bridges. This paper extends the previous study on the taut string representation of the cable by adding cable sag and incli- nation. The response of the proposed system compared to those of the cable with and without an external damper, and the mov- able anchorage system provides very effective mitigation of cable vibration. Cable damping ratio is seen to be remarkably reduced by movable anchorage system for a wide range of cable sag. This result shows that the sag effects of the proposed sys- tem should be considered.
Keywords : cable-stayed bridge, sag, vibration control, wind loads
···
요 지
사장교 케이블은 구조적으로 휨강성과 감쇠력이 작아 풍우에 의해 쉽게 유해진동이 발생한다. 이러한 풍우진동을 저감시키 기 위한 효과적인 방법으로 부가댐퍼를 장착하여 케이블의 감쇠력을 증가시키는 제어시스템이 널리 사용되어왔다. 그러나 사 장교의 장대화로 인해 구조적으로나 미적으로 충분한 감쇠력을 제공할 수 있는 위치에 부가댐퍼를 장착하기 어렵게 되었다.
최근 본 저자는 사장교의 미관을 해치지 않으면서 기존의 제어시스템보다 효과적으로 케이블의 진동을 저감시킬 수 있는 새 로운 개념의 사장교 케이블 진동 제어시스템을 제안하였다. 본 논문에서는 기존의 연구를 확장하여 새그(Sag)를 고려한 Movable anchorage 시스템을 제안하였으며, 수치해석을 통한 제어성능을 평가하였다. 수치해석의 결과 제안된 시스템은 새 그를 고려하였을 때에도 고려하지 않은 경우와 마찬가지로 베어링장치의 강성이 작을수록 기존의 비감쇠 시스템이나 일반적 인 수동제어시스템보다 훨씬 좋은 성능을 나타내었다. 제안된 시스템에 있어서 최적의 제어성능을 제공하기 위해서는 새그의 크기를 고려해서 최적의 감쇠계수를 결정해야 할 것으로 사료된다.
핵심용어 : 사장교, 새그, 진동제어, 풍하중
···
1. 서 론
최근 들어 구조적 효율성과 경제성 및 미적인 장점으로 인해 장경간의 사장교 건설이 세계적으로 증가되고 있다 . 그 러나 사장교 주요 부재인 케이블은 강성 및 자체 구조 감쇠 비가 매우 작아서 바람 또는 비바람에 의해 쉽게 진동이 발 생한다 (Watson & Stafford 1988). 이러한 진동은 케이블의 수명을 단축시키고 접합부의 피로파괴를 야기 시킬 뿐 아니
라 교량의 사용성에도 막대한 영향을 미치므로 적절한 진동 저감 대책이 요구된다 .
일반적으로 케이블의 진동 제어방법은 크게 공기역학적 방 법 , 고유진동수 변화에 의한 방법 그리고 감쇠 증가에 의한 방법이 있다 . 이 중 댐퍼를 장착하여 케이블의 감쇠력을 증
가시키는 방법은 가장 효과적인 진동 저감법으로 그 동안 많은 연구가 진행되어왔다 . 대표적으로 Kovacs(1982) 에 의해 수동댐퍼를 부착한 케이블의 최대 감쇠율과 최적의 댐핑계
*정회원·교신저자·한양대학교토목공학과박사후연구원
(E-mail : [email protected])
**롯데건설
(
주)
사원(E-mail : [email protected])
***정회원·한양대학교건설환경시스템공학과교수
(E-mail : [email protected])
수를 결정하는 근사해가 개발되었으며 , Pacheco
et al.(1993) 은 무차원 변수를 사용하여 댐퍼의 위치에 따른 최적
의 댐핑계수를 산정할 수 있는 설계곡선을 제안하였다 .
Krenk(2000) 는 팽팽한 케이블에서 댐퍼의 위치에 따른 저차
모드에서의 감쇠율을 계산할 수 있는 정확해를 개발하였으
며 Main and Jones(2002) 는 점성댐퍼가 부착된 케이블의
복소고유치 문제를 해석으로 체계화하였다 . 또한 반능동 댐 퍼를 이용하여 케이블의 진동을 저감시키고자하는 해석적 연 구도 수행되어 Johnson
et al.(1999) 은 반능동 댐퍼를 이용 하여 케이블의 진동을 수동댐퍼보다 효과적으로 제어할 수 있음을 보였다 .
댐퍼의 부가에 의해 발생되는 부가 감쇠력은 케이블에 부 착된 댐퍼 단부의 상대 운동량에 비례하므로 케이블의 정착 단으로 부터 멀리 떨어져 댐퍼를 설치하여야만 효과적인 제 어 성능을 발휘할 수 있다 . 그러나 오늘날 사장교는 설계 및 시공 기술의 발달로 인해 나날이 장대화 되어 최장 케이 블의 길이가 일본의 Tatara Bridge(Endo
et al.1999) 와 프 랑스의 Normandie Bridge(Virloguex
et al.1994) 에서와
같이 450 m 가 넘는 사장교가 가설되었으며 , 주경간장이
1,018 m 에 이르는 Stonecutters Bridge(Russell 1999) 가 홍 콩에 건설되고 있다 . 이에 따라 장대화된 사장교는 구조적으 로나 미적으로 충분한 부가감쇠력을 제공할 수 있는 위치에 부가 댐퍼를 장착하기가 어렵게 되었다 .
사장교의 미관을 해치치 않으면서 케이블에 발생하는 진동 을 기존의 시스템보다 효과적으로 저감시킬 수 있는 새로운 개념의 사장교 케이블 진동제어시스템이 제안되었다 ( 황인호
등 2006). 제안된 시스템은 케이블을 팽팽하다고 가정하고
케이블 정착부에 적층고무베어링 (Laminate Rubber Bearing)
과 같은 유동이 가능한 장치와 정착단 내부의 댐퍼로 구성 되어진 수동제어시스템으로 , 수치해석을 통해 효과적으로 유
해한 진동을 제어할 수 있음을 보였으나 , 케이블 새그 (Sag)
의 영향에 대한 검증이 이루어지지 않았다 .
Sulekh(1990) 는 기존 댐퍼시스템 경우 새그를 고려하였을
때 1 차 Symmetric Mode 에서 약 14% 의 진동 저감 성능을
보였고 , Xu
et al.(1998) 또한 고차모드를 제외한 첫 번째
Symmetric Mode 에서 약 38% 의 감쇠력이 감소함을 보였다 .
그러므로 본 연구는 사장교 케이블에 새그를 고려하여
Movable Anchorage 시스템을 수정 모델링 하였으며 , 케이
블의 진동제어 성능을 평가하였다 .
2. 새그를 고려한 Movable Anchorage 시스템
대부분의 사장교 케이블은 소켓이나 앵커헤드를 이용하여 교량의 상판이나 앵커리지에 정착된다 ( 그림 1). 그러나 이러 한 일반적인 수동제어 시스템은 구조적 , 미적인 면을 모두 충족시키기 어렵다 .
이에 황인호 등 (2006) 은 그림 2 와 같이 베어링 장치와 내
부댐퍼로 이루어진 새로운 개념의 수동제어시스템을 제안하 여 , 효과적으로 유해진동을 제어할 수 있음을 확인하였다 .
본 논문은 그림 3 에서와 같이 사장교 케이블의 새그를 고
려한 Movable Anchorage 시스템을 제안하였다 . 새그를 고
려한 Movable Anchorage 시스템은 단위질량이
m인 케이블
단부에 베어링 장치에 의한 강성 ( ) 과 댐퍼에 의한 감쇠비
( ), 그리고 앵커헤드의 질량 (
ma) 으로 구성된다 .
하중은
x축 방향요소인 장력 (
H) 과 케이블에 가해지는 분포
kscd
그림 1. 일반적인 수동제어 시스템
그림 2. Movable Anchorage 시스템
그림 3. LRB 를 이용한 movable anchorage 시스템의 개념도
하중인 , 베어링 장치에 의해 케이블 단부에 가해지
는 하중인 을 받으며 , 는 Dirac delta 함수이다 .
여기서 외력에 의한 수직방향 변위 (
w) 는 무차원 변수에 의 해 다음과 같은 편미분 방정식으로 표현할 수 있다 .
(1)
식 (1) 의 경계조건은 시간 (
t) 에 관하여 다음과 같이 표현된다 . (2)
새그와 관련된 무차원의 변수는 식 (1) 에서 λ
2으로 표현되 며 , 그 값은 식 (3) 으로 구할 수 있다 (Irvine, 1981).
(3) (4)
여기서 는 다음과 같이 구할 수 있다 .
(5)
식 (1) 과 (2) 를 무차원 변수화하면 다음과 같은 무차원 편 미분 방정식과 경계조건이 유도된다 .
(6) (7)
여기서 무차원의 변수는 다음과 같이 정의하였다 .
(8)
케이블의 동적변위는 일반적인 모달해석 방법을 이용하여 다음과 같이 가정할 수 있다 .
(9)
여기서
qi(
t) 는 시간에 따른 일반적인 좌표값이며 , φ
i(
x) 는 형 상 함수로 다음과 같이 가정하였다 .
(10)
식 (10) 의 일반해 φ
i(
t) 는
(11)
이고 , 식 (7) 에서 경계조건 이므로
(12)
이다 . 식 (12) 의 φ
i(1) 과 를 식 (7) 에 대입하면
(13)
이다 . 수식을 정리하면
(14)
이고 , 이므로
(15)
이다 .
식 (15) 를 정리하면
(16)
이 식 (16) 로부터 α
i가 얻어진다 .
여기서 는 제안된 시스템 변수로서 각각 대상 케이 블의 제원에 따라 결정된다 . 즉 시스템 변수를 달리 가정함 에 따라 다양한 종류의 케이블 진동제어 성능을 확인할 수 있다 . 또한 앵커헤드의 질량 (
ma) 과 케이블의 전체 질량 (
mL)
의 비에 의해 앵커헤드의 영향을 나타낸다 .
식 (7), (9), (10), (16) 를 식 (6) 에 대입하고 형상함수 φ
i(
x) 를 가중함수로 하여 다음과 같은 직교성을 이용한 Galerkin 방법을 적용하면
(17)
제안된 제어 시스템의 행렬 운동 방정식은 다음과 같이 구해진다 .
(18)
여기서 질량행렬 [ M ] 과 댐핑행렬 [ C ] 은 각각 다음과 같다 .
(19)
강성행렬 [K] 은 다음과 같다 .
(20)
그리고 q =[
qi(
t)] 는 변위벡터 , f=f (
t) = [
f1f2…
fm]
T는 풍하중에
의한 외력벡터이고 케이
블 단부의 위치벡터이다 .
표 1 은 강성행렬을 기존의 일반적인 수동제어 시스템과 제
안된 Movable Anchorage 시스템을 새그의 유무에 따라 비
교해서 나타내었다 . 새그를 고려하였을 때와 고려하지 않았
을 때의 강성행렬이 확연히 다름을 확인할 수 있다 .
제안된 사장교 케이블 진동제어시스템은 베어링 장치를 설치 하여 횡방향 변위가 가능하도록 하였으며 , 기존의 면진장치인
LRB(Laminated Rubber Bearing) 나 FPB(Friction Pendulum
Bearing) 등을 베어링 장치로 설치할 경우 실제 적용 가능
f x
( ,
t)
FI
( )
tδ ( ) ⋅
m
∂
w2( )
x t,
∂
t2--- c
∂
w x t( ) ,
∂
t--- H
∂
w2( )
x t,
∂
x2 ---–
λ
2HL3
--- w
( ) ξ ξ ,
td0
∫L
+ +
f x t
( ) ,
+FI( )
tδ (
x L–)
=
w
( )
0,
t H∂
w L t( ) ,
∂
x ---= +
(
ks–wi2ma)
w L t( ) ,
=0λ
2 L LeH---mgLcos
θ
---H
⎝ ⎠
⎛ ⎞
2EA 8L LeH ---⎝ ⎠ ⎛ ⎞
dL---2EA= =
Le L 1 18---mgLcos
θ
---H⎝ ⎠
⎛ ⎞
2+ L 1 8+
⎝ ⎠ ⎛ ⎞
L---d 2= =
d
d dL mgL2cos
θ
8H ---
= =
∂
w2( )
x t,
∂
t2--- c
∂
w x t( ) ,
∂
t --- 1α
02---
∂
w2( )
x t,
∂
x2 ---–
λ
2α
02--- w
( ) ξ ξ ,
td0
∫ 1
+ +
f x t
( ) ,
+FI( )
tδ (
x–1)
=
w
( ) ∂
0,
t w( )
1,
t∂
x--- k---HsL
α
i2ma mL---⎝
–⎠
⎛ ⎞
w( )
1,
t+ 0
= =
t w= 0t
,
x=x L⁄ ,
c c mw=⁄
0,
w x t( ) ,
=w x t( ) , ⁄
L w02=Hα
02⁄
mL2, α
i=α
iL, δ ( )
0=Lδ ( )
0, ξ
=ξ ⁄
L f x t( ) ,
=Lf x t( ) α , ⁄
02H,
FI( )
t =FI( ) α
t⁄
02Hw x t
( ) ,
qi( )φ
t i( )
xi=1
∑n
=
φ ( )
x =sinα
ixφ
i( )
x =c1cosα
ix c+ 2sinα
ixφ
i( )
0 =0φ
i( )
x =c2sinα
ixφ
i′( )
1α
ic2cosα
i ksL ---H–α
i2mL---ma⎝ ⎠
⎛ ⎞
c2sinα
i+ =0
c2
α
icosα
i ksL ---Hα
i2mamL---
⎝
–⎠
⎛ ⎞
sinα
i⎝
+⎠
⎛ ⎞
=0c2
≠
0α
icosα
i ksL ---Hα
i2mamL---
⎝
–⎠
⎛ ⎞
sinα
i+ =0
tan
α
iα
iksL ---H
α
i2mamL--- ---–
=
ksL H
⁄
φ
i( )φ
x j( )
x0
∫ 1 dx=
⎝ ⎛
12---– sin24---1α
iα ⎠ ⎞δ
ijMq
··+ Cq
·+ Kq = f ϕ +
FI( )
tM
1 2--- 14
α
i---sin2
α
i⎝
–⎠
⎛ ⎞δ
ij=
C
c 1 2--- 14
α
i---sin2
α
i⎝
–⎠
⎛ ⎞δ
ij cmij= =
kij=kijten+ksag kijten
α α
i---0
⎝ ⎠ ⎛ ⎞
2 1 2--- 14
α
i---sin2
α
⎝
+⎠
⎛ ⎞δ
ij= ksag
λ
2α
02---kisagkjsag
λ
2α
02---
φ
i0
∫ 1
( )
xdx∫0 1φ
j( )
xdx= =
λ
2α
02--- 1
α
--- 1 cosi
(
–α
i)
⎝ ⎠
⎛ ⎞
1α
j--- 1 cos
(
–α
j)
⎝ ⎠
⎛ ⎞
=
ϕ ϕ
=( )
x1 =[ φ
1( )φ
x1 2( )…φ
x1 m( )
x1]
T할 것으로 사료된다 ( 그림 4).
시스템의 동적해석을 위해 상태공간방정식 (State-Space
Equation) 을 유도하였으며 . 또한 제어성능 평가를 위한
RMS(Root Mean Square) 방법을 적용하였다 . 먼저 베어링
장치에 의해 케이블 단부에 가해지는 감쇠력은 다음과 같이 표현된다 .
(21)
여기서
ks와
cd는 무차원 강성계수와 감쇠계수로 다음과 같다 . (22)
식 (22) 로부터 제안된 사장교 케이불 진동제어 시스템의
선형 상태공간 방정식은 다음과 같이 유도된다 .
(23)
여기서 는 상태 백터이며 는
각각 변위 , 속도 , 가속도에 관련된 백터이고 A
p, G , C
p, 그 리고 H 행렬은 다음과 같다 .
(24)
여기서 베어링 장치의 강성행렬과 감쇠행렬은 각각 다음과 같다 .
(25)
3. 수치해석사장교 케이블의 새그를 고려한 Movable Anchorage 시
스템의 케이블 진동 제어 성능을 평가하기 위해 수치해석을 수행하였다 . 수치해석의 결과인 새그를 고려하지 않은 시스 템과 고려한 시스템의 감쇠계수에 따른 케이블의 감쇠비를 표 2 에 나타내었다 . 일반적인 수동제어 시스템은 케이블의 총 길이에서 단부로부터 각각 1% 와 2% 부분에 설치한 것 으로 가정하였으며 , Movable Anchorage 시스템은 변수 을 각각 0.01, 0.05, 0.1, 0.2 로 변화시키면서 성능을 비교하였다 . 그림 5 는 새그를 고려하여 수치해석을 실시한 결과이며 , 새그에 대한 변수 λ
2의 값은 서해대교에 설치된
FI( )
t =–ksv ( )
1,
t –cdv · ( )
1,
tks=ksL
⁄ λ
02H,
cd=cd⁄
mLw0η
·= A
pη Gf +
z C =
pη Hf +
η = [ q
Tq
·T]
Tz = [ q
Tq
·Tq
··˜T]
TA
p= A A +
i0 I M
–1K
– –
M
–1C
0 I
M
–1K
sM
–1C
d+
= G 0
M
–1=
C
pC C +
iI 0
0 I
M
–1K
– –
M
–1C
0 0
0 0
M
–1K
sM
–1C
d+ H 0
0 0
= = =
K
s=–ksϕϕ
T, C
d=–cdϕϕ
TksL H
⁄ 표 1. 강성행렬 [K] 의 비교
모 델 링 강성행렬
미고려 새그
일반 수동제어 시스템
(Johnson et al., 2007)Movable Anchorage
시스템
(
황인호 등
, 2006)새그 고려
일반 수동제어 시스템
(Johnson et al., 2003)
Movable Anchorage
시스템
i21 2---
δ
ijai2
α
02---
⎝ ⎠ ⎜ ⎟
⎛ ⎞
1 2--- 14
α
i---sin2
α
i⎝
+⎠
⎛ ⎞δ
ijK
sag+K
ten=λ
2kisagkjsag+kijten kisag 2⁄
iπ
2(
oddi)
0
(
eveni)
⎩ ⎭
⎨ ⎬
⎧ ⎫
= kijten t21
2---
δ
ij=
K
sag+K
ten=λ
2kisagkjsag+kijten kisag 1α
0--- 1
α
--- 1 cosi
(
–α
i)
⎝ ⎠
⎛ ⎞
= kijten
α
i2α
02---
⎝ ⎠ ⎜ ⎟
⎛ ⎞
1 2--- 14
α
i---sin2
α
i⎝
+⎠
⎛ ⎞δ
ij=
그림 4. LRB 를 이용한 movable anchorage 시스템의 개념도
최장 케이블의 값인 3.86 로 사용하였다 .
표 2 로부터 새그를 고려한 시스템의 경우는 고려하지 않 은 시스템과 마찬가지로 베어링 장치의 강성 ( ) 이 감소 할 수록 일반적인 수동제어 시스템보다 높은 감쇠성능을 보여 줌을 알 수 있다 . 즉 , 새그를 고려하였을 때에도 최적의 제 어성능을 제공하기 위해서는 최적의 감쇠계수 ( ) 를 결정해 야 함을 알 수 있다 . 또한 새그를 고려하면 전체적인 감쇠 성능이 낮아짐을 알 수 있다 .
새그를 고려하면 감쇠율이 낮아지므로 제안된 시스템의 새 그의 크기 ( λ
2) 와 그에 따른 감쇠율의 변화를 그림 6 에 나타 내었다 . 시스템 변수인 은 0.1 로 고정하였으며 , λ
2을
0, 1, 3.86, 5, 10 로 변화시키면서 감쇠율의 크기를 비교하
였다 . 그 결과 새그의 크기가 커질수록 감쇠성능이 낮아짐을
확인할 수 있었고 , Movable Anchorage 시스템을 적용한
케이블의 해석을 함에 있어서는 새그의 영향이 고려되어져 야 함을 알 수 있었다 .
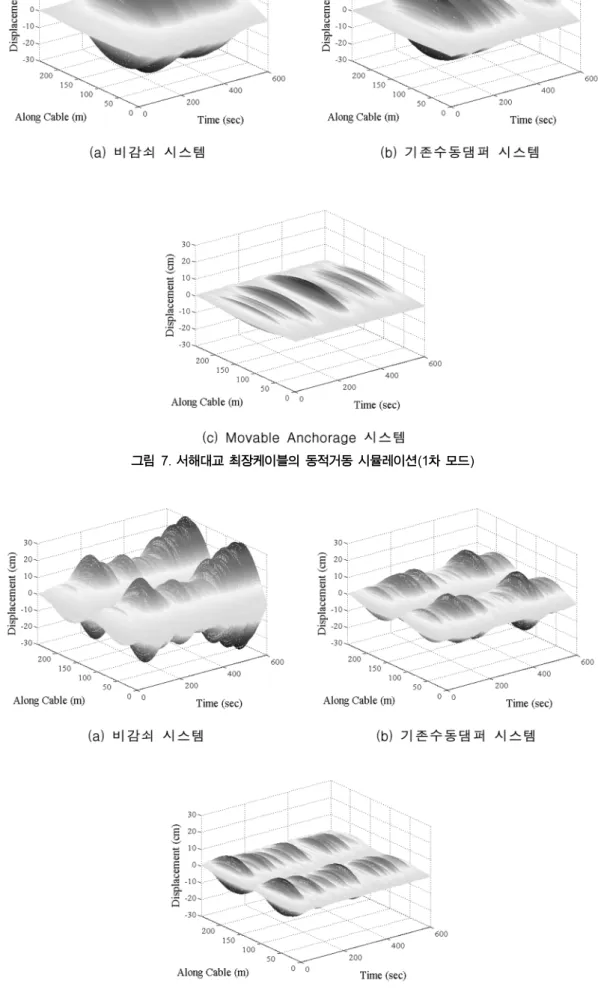
과거에 행해졌던 새그의 영향에 관한 연구를 보면 다른 고차모드를 제외한 1 차 Symmetric mode 에서 새그의 영향
이 큼을 알 수 있다 (Sulekh 1990). 본 연구도 모드에 따
른 새그의 영향을 그림 7 과 8 에 나타내었다 . λ
2은 서해대교 의 값인 3.86 로 고정하였으며 , 1 차 Symmetric mode 와
Antisymmetric mode, 그리고 2 차 Symmetric mode 에서 새 그의 영향을 비교하였다 . 비교 결과 고차모드의 경우에는 새 그의 영향이 거의 없음을 확인하였고 1 차 Symmetric mode 에
서 약 26.74% 의 감쇠율이 낮아짐을 알 수 있었다 . 수동댐퍼
에 관한 연구들을 보면 Sulekh(1990) 의 경우 새그를 고려하였
을 때가 고려하지 않았을 때 보다 1 차 Symmetric Mode 에서 약 14% 의 성능감소를 보였고 , Xu
et al.(1998) 의 경우도 마 찬가지로 고차모드를 제외한 첫 번째 Symmetric Mode 에서 약 38% 의 감쇠성능이 감소함을 보였다 .
새그를 고려한 Movable Anchorage 시스템의 현장 적용
성을 평가하기 위해 실교량에 적절한 베어링 장치를 설계하 여 적용한 후 , 수치해석을 통해 제어성능 및 적용성을 평가 하였다 . 대상구조물은 서해대교로 2 개의 주탑과 72 개의 케이
블로 상판을 지지하고 있으며 주탑과 주탑 사이의 거리가
460 m 이다 . 최장 케이블의 길이는 246.85 m, 단위중량은
125.3 kg/m, 케이블의 지름은 28 cm, 초기 인장력은 6261 kN 이다 .
일반적으로 비바람에 의한 케이블의 진동은 저차모드에서 발생하는 것으로 알려져 있다 . 그러므로 본 연구에서는 풍하 중에 의해 발생되는 분포하중
f(
x,
t) 을 다음과 같이 가정하 였다 .
(26)
여기서
W(
t) 는
E[
W(
t)
W(
t+ τ )]= δ ( τ ) 인 Zero-mean Gaussian White Noise 로 가정하였다 .
그림 7 과 8 은 비감쇠 시스템 , 최적의 수동 점성댐퍼
(
xd=0.01) 시스템과 제안된 Movable Anchorage 시스템
( =0.1) 의 1 차 모드와 2 차 모드 시뮬레이션 결과이다 .
그림에서와 같이 새그를 고려한 Movable Anchorage 시스
템은 기존의 비감쇠 시스템 및 일반적인 수동제어 시스템과 비교하였을 때 , 변위가 최대 60% 정도의 감소 효과를 보여 성능의 우수함이 확인되었다 . 그러나 다른 시스템과는 달리 케이블 단부에서 미소 변위가 발생되고 있음을 알 수 있다 .
그림 9 은 1 차 모드에서 케이블 중앙점에서의 동적거동을 비
kscd
ksL H
⁄
f x t
( ) ,
=W t( )
sinπ
xksL H
⁄
표 2 시스템의 감쇠계수에 따른 케이블의 감쇠비 (%)
Passive
0.01 0.05 0.1 0.2 xd=0.02 xd=0.01
λ
2=0 0.35 1.37 2.75 5.79 1.07 0.56λ
2=1 0.31 1.20 2.38 4.96 0.96 0.50λ
2=3.86 0.22 0.85 1.65 3.37 0.70 0.36λ
2=5 0.20 0.74 1.44 2.93 0.62 0.32λ
2=10 0.12 0.43 0.82 1.70 0.37 0.19ksL H
⁄
그림 5. 새그 ( λ
2=3.86) 를 고려한 Movable Anchorage 시스템의 제어성능 평가
그림 6. λ
2의 크기에 따른 감쇠성능의 비교
그림 7. 서해대교 최장케이블의 동적거동 시뮬레이션 (1 차 모드 )
그림 8. 서해대교 최장케이블의 동적거동 시뮬레이션 (2 차 모드 )
교한 것으로 비감쇠 시스템은 케이블 최대 30 cm 내외의 진
동을 보이고 있으며 기존의 수동댐퍼 시스템은 약 25 cm 내
외로 진동 저감 효과를 보이고 있다 . Movable Anchorage 시
스템은 8 cm 내외의 우수한 진동 제어 효과를 보이고 있다 .
이러한 새그를 고려한 Movable Anchorage 시스템이 케
이블에 어떠한 영향을 미치는지 알아보기 위해서 λ
2을 3.86
로 고정한 후 시스템 변수인 을 0.01, 0.05, 0.1,
0.2 로 변화를 시키면서 케이블의 위치에 따른 시스템의 영향
을 그림 10 에 나타내었다 . 그 결과 케이블 중앙에서는 시스 템 변수 ( ) 가 0.2 일 때 가장 좋은 성능을 보였고 , 케이 블 끝단에서는 시스템 변수 ( ) 가 0.01 일 때 가장 좋은 성능을 보였다 . 이는 케이블의 길이 (
L) 에 따라서 적절한 시
스템 변수를 설정해야 하며 , 이는 Movable Anchorage 시
스템을 사용함에 있어서 사장교의 케이블 길이를 고려하고 적절한 댐핑력 및 강성 ( ) 을 가진 댐핑장치를 설정해야 함 을 나타낸다 .
4. 결 론
본 논문에서는 새그를 고려한 Movable Anchorage 시스템 을 제안하였으며 수치해석을 통하여 시스템의 성능과 새그의 영향에 대하여 검증하였다 . 수치해석의 결과 제안된 시스템은 새그를 고려하였을 때에도 고려하지 않은 경우와 마찬가지로 베어링장치의 강성이 작을수록 기존의 비감쇠 시스템이나 일 반적인 수동제어시스템보다 훨씬 좋은 성능을 나타내었다 . 그 러나 새그를 고려하였을 때에는 전체적으로 감쇠력이 낮아졌 고 , 시스템의 해석에 있어서는 새그를 고려해야 함을 알 수 있었다 . 그리고 새그의 양이 커질수록 감쇠력 또한 하락함을 알 수 있었다 . 따라서 제안된 시스템에 있어서 최적의 제어성 능을 제어하기 위해서는 케이블이 가진 새그의 크기를 정확 히 계산하여 최적의 감쇠계수를 결정해야 할 것으로 사료된 다 . 그리고 새그를 고려한 Movable Anchorage 시스템은 서
해대교를 예를 들어 시뮬레이션을 실시해 본 결과 기존의 시 스템보다 월등한 성능을 보임을 알 수 있었다 .
ksL H
⁄
ksL H
⁄
ksL H
⁄
ks
그림 9. 케이블 중앙점에서의 동적거동
그림 10. 케이블의 지점에 따른 새그를 고려한 Movable Anchorage 시스템의 영향
참고문헌
황인호
,이종세
(2006)사장교의 케이블 진동저감을 위한 수동 제
어 시스템
,대한토목학회논문집
,대한토목학회
,제
26권
,제
5A호
, pp. 881-885.Endo, T., Iijima, T., Okukawa, A., and Ito, M. (1991) The Techni- cal Challenge of a Long Cable-stayed Bridge: Tatara Bridge, Cable-stayed Bridges: Recent Developments and their Future, Elsevier, pp. 417-436.
Johnson, E.A., Baker, G.A., Spencer, B.F., Jr., and Fujino. Y. (2007) Semiactive damping of stay cables, J. of Eng. mech., ASCE, Vol. 133, pp. 1-11.
Johnson, E.A., Christenson, R.E., and Spencer, B.F., Jr. (1999) Semiactive damping of stay cables, Proc. 17th Int., Modal Analysis Conf., Society for Experimental Mechanics, Bethel, Conn, pp. 417-423.
Johnson, E.A., Christenson, R.E., and Spencer, B.F., Jr. (2003) Semiactive damping of stay cables, Computer-Aided Civil and Infrastructure Engineering, Vol. 18, Issue 2, pp. 132-146.
Kovacs, I. (1982) Zur Frage der Seilschwingungen und der Seil- dampfung, Die Bautechnik, German, 10, pp. 325-332.
Krenk, S. (2000) Vibration of a taut cable with an external damper,
J. Applied Mech., ASME, Vol. 67, pp. 772-776.
Main, J.A. and Jones, N.P. (2002) Free VibRations Of Taut Cable With Attached Damper. I: Linear viscous damper, J. Eng.
Mech., ASCE, Vol. 128, pp. 1062-1071.
Pacheco, B.M., Fujino, Y., and Sulekh, A. (1993) Estimation curve for modal damping in stay cables with viscous damper, J.
Struct. Eng., ASCE, Vol. 119, pp. 1961-1979.
Russell, H. (1999) Hong Kong Bids for Cable-Stayed Bridge Record, Bridge Design and Engineering, No. 15 (second quarter), 7.
Sulekh, A. (1990) Non-dimensional Curves for Modal Damping in Stay Cables with Viscous Dampers, MS thesis, Dept. of Civil Eng., Univ. of Tokyo, Tokyo, Japan
Virloguex, M., et al. (1994) Design of the normandie bridge, Proc.
Int. Conf. on Cable-stayed and Suspension Bridges, IABSE, Deauville, France, pp. 605-630.
Watson, S.C. and Stafford, D. (1988) Cables in Trouble, Civil Eng., ASCE, Vol. 58, No. 4, pp. 38-41.
Xu, Y.L. and Yu, Z. (1998) Mitigation of Three-dimensional Vibra- tion of Inclined Sag Cable Using Discrete Oil Dampers - I.
Formulation. J. of sound and vibration, Vol. 214, pp. 675-693.
(