건물외벽 유지보수를 위한 원격조정 곤돌라 개발
Development of Remote Controlled Gondola for Maintenance of Building Facade
함영복․김홍욱
Young Bog Ham and Hong Uk Kim
1. 서 론
최근 고층건물의 수가 지속적으로 증가하는 추세 에 있으며 고층건물의 외벽 유지관리에 대한 관심 으로 이어지고 있다1).
현재 건물의 유지 보수작업은 작업자가 로프에 의 지하거나 건설용 곤돌라에 작업자가 탑승하여 작업 을 진행하는 방식이 보편적으로 행해지고 있다. 이러 한 재래식 작업방식은 작업자의 추락, 도장기구 낙하 로 인한 사고 등 안전사고에 노출되어 있다. 이로 인 해 인력수급 문제 및 인건비 상승으로 이어지고 있 다. 또한, 페인트 비산으로 인한 시설물의 오염은 손 해배상 등의 비용손실로 경제성이 점차 상실되고 있 는 실정이다. 그에 따라 건물외벽 유지관리를 위한 자동화 시스템 개발에 대한 연구가 활발히 진행되어
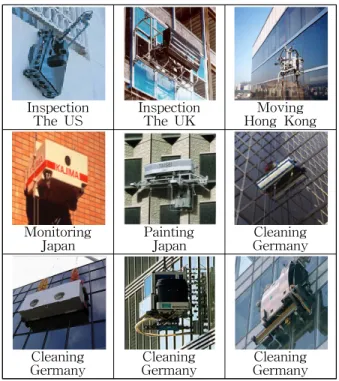
왔고2)~3), 대부분이 Fig.1 과 같이 외관검사와 청소작
업에 실용화된 사례를 확인할 수 있었다.
Inspection
The US Inspection
The UK Moving Hong Kong
Monitoring
Japan Painting
Japan Cleaning Germany
Cleaning
Germany Cleaning
Germany Cleaning Germany
Fig. 1 Examples of abroad building wall maintenancerobot
본 연구에서는 기존 재래식 작업방식의 문제점을 해결하고자 원격조정 곤돌라를 개발하였다. 이를 위 해 이동/작업 메커니즘, 플랫폼 및 행거시스템을 개 발하였으며, 건물 상부의 고정방법, 건물 외벽의 형 태, 페인트 비산 등을 고려하였다.
2. 원격조정 곤돌라 개발
2.1 연구개발 개요
본 연구는 원격조정 곤돌라의 개발과 현장 적용 을 통한 성능검증, 그리고 상용화를 목표로 하였다.
원격조정 곤돌라의 작업은 신축 혹은 기존 건물 외 벽 도장작업을 목표로 삼았다. 비교적 상용화가 이 루어진 청소 작업보다는 외벽 도장작업에 자동화가 필요하다고 인식하였다. 건물 외벽의 도장작업은 곤 돌라 또는 달비계에 탑승하여 작업에 제한을 많이 받는 형태로 행해진다. 외벽 도장작업은 결국 노무 의존도가 높을 밖에 없다. 숙련공이 고령화되고 신 규인력 유입이 부족하게 되는 현실도 당면한 문제 이다. 이에 점차 첨단화, 복합화, 고급화 되어가는 건설 산업에서 도장 자동화는 필수적이라고 하겠다.
이를 위하여 원격조정 곤돌라는 작업용 툴을 장착 한 플랫폼이 환경의 영향을 극복하면서 작업하고, 신뢰성과 안전성을 확보할 수 있도록 개발하였다.
Fig. 2 Examples of gondola hanger(Source, KYOUNG SUNG ENTERPRISE)
원격조정 곤돌라 개발에서 이동 및 작업방법은 작업 생산성을 결정짓는 중요한 요소이다. 기존 곤 돌라 시스템의 이동방법으로는 주로 윈치(winch)를 이용하여 승하강을 하며, 이를 위해 옥상에 행거와 같은 고정장치가 필요하다. 고정장치는 Fig. 2와 같 이 고정식 행거 또는 크레인 방식의 특수 곤돌라가 있다. 그러나 두 방법은 수평이동이 불가능한 형태 로 고정식 행거는 설치 및 해체가 번거롭고 수평이 동을 위해서는 추가적인 작업소요가 발생한다. 또 한, 크레인 방식은 건물 설계시 부터 반영되어야 하 고, 고가의 설치비용으로 실용화가 미비한 실정이 다. 이러한 부분은 곤돌라 시스템의 경제성을 저하 시키는 원인이 된다. 이를 위해 소형 및 경량화되어 설치 및 해체가 용이하고 수평이동이 가능한 형태 의 고정장치인 행거 시스템을 개발하여 적용하였다.
곤돌라 시스템은 다양한 외벽 형태 뿐만아니라 고층에서의 돌풍 등 외란에도 안정적으로 이동하여 균일한 도장품질을 확보할 수 있어야 한다. 이를 위 해 가이드 휠과 벽면 밀착용 팬 장치를 적용하였다.
가이드 휠은 불규칙한 외벽을 하강시 완충작용으로 벽면과 일정한 거리를 유지하며 이동 할 수 있도록 한다. 또한, 석션팬으로 고층에서의 돌풍 등 외란에 도 플랫폼을 벽면 방향으로 밀착시켜 흔들림 없이 작업이 가능하도록 한다.
건물외벽의 도장작업 방식은 넓은 면적을 신속하 게 작업할 수 있는 스프레이 방식을 적용하였다. 하 지만 스프레이 방식은 비산으로 인한 시설물 오염 등의 문제가 발생한다. 도장작업시 페인트의 비산은 아주 민감한 부분이 될 수 있다. 이는 비용손실 및 민원발생의 원인이 된다. 이를 위해 에어리스 방식 으로 분사압력, 노즐, 페인트 점도에 대한 연구를 진행하여 파라미터를 결정하였으며, 노즐 주변에 비 산커버를 부착하여 비산량을 최소화 하였다. 또한, 페인트 비산으로 인한 우려가 있어 로울러 작업이 가능한 도장툴을 추가적으로 개발하여 적용하였다.
2.2 곤돌라형 플랫폼 개발
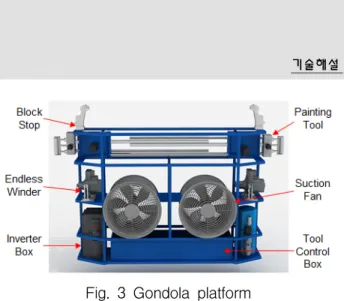
곤돌라 플랫폼의 기본 구성은 Fig. 3과 같고, 여러 버전을 거치며 작업방식에 따라 Fig. 4와 같이 2개 의 형태로 제작되었다. 플랫폼의 뼈대에 해당하는 곤돌라 케이지는 경량화를 위하여 AL재질의 각관 40㎜×40㎜×30㎜을 이용하였다.
두 가지 타입의 플랫폼에는 도장용 스프레이 노 즐 8개와 로울러 작업이 가능한 도장툴이 각각 탑
Fig. 3 Gondola platform
재되었다. 승하강 장치로는 엔드리스 와인더와 안정 적인 작업을 위한 석션팬과 가이드 휠도 부착되었 다. 안전장치로는 블록스탑이 적용되었다. 또한, 곤 돌라의 전기장치들의 전원분배와 보호계전기 등을 위한 CB/CP(control panel/box)와 원격 제어를 위한 Task Manager PC, 외벽형태 인식용 센서, 모니터링 카메라 등이 탑재되었다.
(a) Platform for spray work
(b) Platform for spray and roller work Fig. 4 Wireless gondola platform
2.2.1 벽면 밀착용 석션팬 장치
곤돌라 시스템이 고층 작업시 돌풍 등의 외란 극 복을 위하여 석션팬(suction fan)이 적용되었다. 이를
위해 다양한 형태의 팬과 벽면 밀착 메커니즘들이 연구되었다4). 벽면 밀착용 팬의 경우에는 풍하중에 의한 부압을 극복해야 함으로 일정한 출력이 기본 적으로 요구된다.
석션팬은 Fig. 5와 같은 풍압분석 결과 및 실험을 거쳐 직경 600㎜로 380V, 1.35kw, 1,750rpm의 석션 팬을 2개 선정하였다. 또한 흡착력을 배가시키기 위 하여 Fig. 6과 같이 덕트형태의 틀에 브러시를 부착 하였다.
Fig. 5 Air pressure simulation
Fig. 6 Suction fan of duct type
2.2.2 벽면 가이드 휠
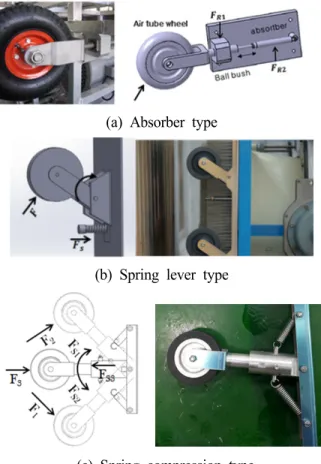
벽면 가이드 휠(guide wheel) 장치는 곤돌라 플랫 폼의 승하강시 충격과 마찰을 줄여주는 역할을 한 다. 벽면의 요철, 장애물들과 외란에 의한 플랫폼의 충격 등을 극복하여 벽면과의 거리를 일정하게 유 지 시켜주는 장치이다. 이를 위해 가이드 휠은 다양 한 외벽 형태에서도 적절하게 대응하여야 한다. 가 이드 휠은 Fig. 7과 같이 다양한 형태로 설계되었다.
Fig. 7 (a)는 완충부에 Ball bush 및 완충기를 고려하 였으나 창문 등의 장애물 극복에 불리하였다. 그리 고 Fig. 7 (b)는 스프링 레버형 타입으로 하강시 힘 F가 바퀴에 작용하면 바퀴가 벽면으로 회전을 하게 된다. 이때, 스프링의 힘 Fs가 작용하여 완충역활을
하도록 설계하였다.
하지만 스프링 고정핀이 구조물에 걸리는 현상과 상승시에는 적용이 불가능하였다. 이를 위해 Fig. 7 (c)와 같이 스프링 고정핀을 제거하고 실린더 내외 부의 스프링에 의해 완충작용을 하도록 보완하였다.
스프링 압축형은 내외부의 스프링에 의해 힘 F1, F2, FS 에 대응이 가능하여 승하강시 안정적인 이동이 가능하다.
(a) Absorber type
(b) Spring lever type
(c) Spring compression type Fig. 7 Guide wheel
2.2.3 와인더 및 안전장치
곤돌라형 플랫폼에는 승하강 장치로 엔드리스 와인더를 적용하였다. 기존의 윈치방식은 와이어 로프를 드럼에 권선하는 방식으로 드럼의 크기가 한정되어 적용할 수 있는 높이가 제한되며, 감겨있 는 와이어의 양에 따라 속도가 달라지는 단점이 있다. 엔드리스 와인더는 일정한 속도로 승하강이 가능하며 인양높이의 제한이 없고, AG breake Motor가 적용되어 전원 차단시에도 플랫폼의 추락 을 방지할 수 있도록 되어있다. 와인더의 사양은플 랫폼의 무게를 고려하여 인양능력이 500kg/개이고, 인양속도는 6.3m/min으로 Fig.8 (a)와 같은 와인더 를 적용하였다.
안전장치로는 Fig. 8 (b)와 같이 블록스탑이 적용 되었다. 블록스탑은 주와이어의 파단시 동작하여 보 조와이어에 의해 플랫폼의 추락을 방지해 주는 장 치로 와인더 의 상부에 설치된다.
(a) Winder(SKY080A)
(b) Bloc stop(GSD100D)
Fig. 8 Winder and bloc stop(Source, Haisung)
2.2.4 도장툴
스프레이 방식의 도장툴은 스프레이 방식으로 Fig. 9 (a)와 같이 노즐 8개를 이용하여 페인트를 분 사하고, 도장폭은 2.5m 가 가능하도록 하였으며, 페 인트의 비산을 방지하기 위한 비산커버를 적용하였 다. 분사 실험을 진행하여 균일한 도장품질과 페인 트 비산을 최소화 할수 있는 파라미터를 확보하여 적용하였다. 실험결과는 분사압력 100bar, 페인트 희 석율 85%, 분사거리 350㎜~400㎜로 확인되었다. 페 인트 노즐은 막힘현상을 방지하기 위하여 공압에 의해 on/off 될 수 있는 타입으로 선정하였다. 그러 나 페인트의 비산으로 인한 시설물 오염의 우려되 어 로울러 작업이 가능한 툴을 설계하였다.
Fig. 9 Spray painting tool
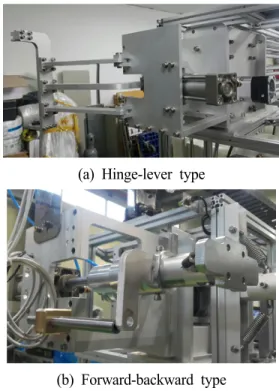
Fig. 10과 같이 분사 노즐과 로울러가 장착된 페 인팅 헤드가 설계되었다. 페인팅 헤드의 벽면 밀착 방식에 따라 힌지-레버형과 전후진형으로 구분된다.
페인팅 헤드는 플랫폼의 외부에서 랙기어와 구동모 터를 이용하여 돌출행정으로 왕복작업 할 수 있도 록 하였다. 작업환경에 따라 스프레이 또는 로울러 작업이 가능하며 스프레이 작업시에는 로울러 툴은 벽면과 이격되어 대기하는 형태이다. 로울러 툴의 페인트 공급은 로울러 내부의 중공형 배관에 직접 공급될 수 있도록 하였다.
(a) Hinge-lever type
(b) Forward-backward type Fig. 10 Methods of roller contact
도료의 공급은 지상의 도료탱크 및 펌프에 의해 30층 높이까지 가능하며, 작업환경에 따라 중간층 또는 옥상에서도 공급이 가능하도록 일체형으로 제 작하였다.
2.3 행거시스템
조임나사식 행거는 Fig. 11 과 같이 행거 아암, 고 리 지지부, 내외측 지지판, 수평이동 로울러 및 셋 팅 핸들, 조임핸들로 구성되었다. 조임핸들로 옥상 구조를 직접 가압하여 고정하는 방식으로 설치 및 해체가 용이하고 다양한 두께에 적용이 가능하도록 설계되었다. 수평이동 로울러로 옥상구조의 상부를 따라 수평이동이 가능하다. 고리 지지부의 T홈은 벽 면과 플랫폼의 거리를 조정 할 수 있도록 하여 다 양한 외벽형태에 대응할 수 있도록 하였다. 또한,
재하시험을 통하여 하중 1ton에서도 안전성을 가지 는 것을 확인하였다.
하지만 조임나사식 행거의 수평이동을 위해서는 작업자가 항시 옥상에 대기하거나 수시로 이동을 해야하는 작업소요가 발생하였다. 이를 해결하고자 Fig. 12와 같은 수평이동 장치를 개발하였다. 시스템 의 제어는 지상의 작업자에 의해 원격제어 되도록 하였다. 행거의 주요 구성은 행거아암, 내외측 지지 부, 구동모터, 주행/보조로울러, 가압용 실린더이다.
수평이동 행거장치의 고정은 옥상구조를 가압용 실 린더로 직접 가압하여 고정하고, 수평이동은 구동모 터와 타이밍 밸트에 의해 주행 로울러를 회전시켜 이동하는 방식이다. 보조 로울러는 옥상구조 내외측 의 마찰을 줄여주는 역할을 하게 된다.
Fig. 11 Thread fastener type hanger
(a) Horizontal moving hanger
(b) Horizontal moving hanger test Fig. 12 Horizontal moving type hanger
수평이동 행거장치는 시작품이 제작되어 Fig. 12 (b)와 같이 모의 벽체를 구성하여 수평이동 테스트 를 진행하였으며, 차후 재하시험을 통한 안정성 검 증이 필요하다.
2.4 원격제어 프로그램
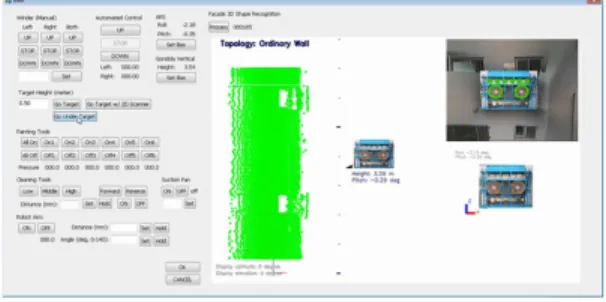
곤돌라형 플랫폼의 제어는 자체 개발한 원격제어 프로그램에 의해 이루어지며 Fig. 13과 같다. 프로그 램은 작업자가 지상에 위치하여 플랫폼의 이동과 외벽형태에 따라 도장툴 on/off를 자동 제어 할 수 있도록 구성되어 있다. 또한, 모니터링 카메라를 이 용하여 실시간 작업상태를 확인 할수 있도록 하였다.
Fig. 13 Wireless control program 3. 곤돌라형 자동화 시스템의 현장적용
곤돌라형 자동화 시스템은 2회에 걸쳐 현장적용 을 진행하였다. 대상 건물은 20층의 신축 건물로 하 였으며, 이를 통하여 리브, 창문 등의 다양한 외벽 형태에서 이동 및 작업성능과 조임나사식 행거의 안정성을 확인하였다.
Fig. 14 Field application 4. 결 론
곤돌라형 자동화 시스템은 신축 또는 기존 건축 물의 외벽 유지관리를 위한 목적으로 개발되었으며,
기존의 인력으로 작업함에 있어 발생되는 큰 문제 점들을 상당부분 해결할 수 있을 것으로 기대된다.
향후, 외벽 유지관리 전문업체 등과 추가적인 현 장실증이 이루어질 것이며, 이를 통하여 상용화 모 델 개발을 추진할 계획이다.
참고 문헌
1) Kim, D. G, Kim, B. K.,”Construction Robot System Design for High-rise Building External Wall Maintenance”,Proc. of the 2010 conference on the Korea Institute of Building Construction, November 2010, Vol. 10, No. 2, PP. 7-10
2) Kim, D. G., Kim, B. K., “Mock-up House Design Modeling for Development of Intelligent Robotic System for High-rise Building Maintenance”, Proc.
of the 2011 Conference on the Korea Institute of Building Construction, April 2011, Vol. 31, No. 11, pp.145-146
3) Kim, Y. S., Lee, J. H., “A Conceptual Model and Technical/Ecconomical Feasibility Analysis of Apartment Exterior Wall Painting Robot”, Journal of the Korea Institute of Building Constrution, September 2006, Vol.22, No.9, pp.139-150
4) Ham, Y. B., Lim, B. J., Park, C. D.,M Gu, J. S., Kim, D. G., and Lee, K. J., “ Measurement of Vacuum Suction Force on Diversely Configured Vertical Outer Walls of Buildings,” International Symposium on Automation and Robtics in Construction, pp. 682-686, 2011.
[저자 소개]
함영복
E-mail : [email protected] Tel : 042-868-7157
2003년 금오공과대학교 기계공학과 박 사. 2004년 일본 동경공대/야마시다대 객원연구원. 1990년~현재 한국기계연구 원 극한에너지기계연구실 책임연구원.
유압 피스톤 펌프 및 모터, 수압 피스톤 펌프, 압전소자 응용 펌프 및 디스펜서 헤드 연구에 종사. 대한기계학회, 한국정밀 공학회, 한국동력기계공학회, 유공압건설기계학회 등의 회원, 공학박사
김홍욱