Korean Journal of Remote Sensing, Vol.35, No.3, 2019, pp.401~413
https://doi.org/10.7780/kjrs.2019.35.3.5 ISSN 1225-6161 ( Print )
ISSN 2287-9307 (Online)
Article
영상 분할 기반의 스테레오 매칭 기법을 이용한 DSM 생성 및 정확도 비교
권 원 석 1)†
DSM Generation and Accuracy Comparison Using Stereo Matching Based on Image Segmentation
Wonsuk Kwon
1)†Abstract: The purpose of this study is to generate DSM using the stereo matching algorithm of worldview-1 stereo images and verify the accuracy of the generated DSM. To generate DSM, RPC block modeling was performed to correct RPC errors, and image matching was performed using SGM, which is a stereo matching algorithm after the epipolar image was generated. The COST for SGM was calculated by using CENSUS, and 4-paths and 8-paths were applied for COST aggregation in SGM. To verify the quality and accuracy of the generated DSM, it was compared with the LiDAR-derived DSM and the DSM generated by commercial SW. The results showed that the vertical accuracy of the generated DSM using 4-paths of COST aggregation was 1.647 m to 3.689 m (RMSE). In case of using 8-paths of COST aggregation was 1.550 m to 3.106 m (RMSE).
Key Words: WorldView-1, SGM, RPC, sensor modeling, DSM, CENSUS
요약 : 본 연구의 목적은50 cm급의 worldview-1 입체영상을 스테레오 매칭 알고리듬을 이용하여 DSM을 생성
하고 정확도를 확인하고자 한다. DSM을 생성하기 위하여, 먼저, RPC 블록모델링을 수행하여 RPC 오차를 보
정하였으며, 에피폴라 영상 생성 후 스테레오 매칭 알고리듬인 SGM을 이용하여 영상 매칭을 수행하였다. SGM
에 사용된COST는 CENSUS를 사용하였으며, COST 누적을 위하여 4방향과 8방향을 적용하였다. 생성된 DSM
의 품질과 정확도를 확인하기 위하여LiDAR DSM과 상용 SW로 생성한 DSM을 비교하였다. 실험 결과 지역에
따라 생성된DSM의 수직정확도는 4방향의 COST 적용 시 RMSE 1.647 m ~ 3.689 m로 나타났으며, 8방향의 COST 적용 시 RMSE 1.550 m ~ 3.106 m로 나타났다.
Received April 24, 2019; Revised May 14, 2019; Accepted June 5, 2019; Published online June 14, 2019
1)
국방과학연구소 연구원 (Researcher, Agency for Defense Development)
†Corresponding Author: Wonsuk Kwon ([email protected])
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License
(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in
any medium, provided the original work is properly cited.
1. 서 론
고해상도 위성영상이 상용화되면서 위성영상과 함 께 제공되는 RPC(Rational Polynomial Coefficient)를 이용 하여 정밀하고 정확한 위치결정이 가능하게 되었으며 , 고밀도 영상 매칭을 통해 위성영상과 동일한 해상도의 DSM(Digital Surface Model)을 생성할 수 있게 되었다. 입 체영상으로부터 DSM을 생성하기 위하여 센서모델링, 에피폴라 영상 생성 , 영상매칭, 3차원 좌표 추출 등의 단 계를 거치게 되며 , 각 단계별 기술들은 국내외에서 많 은 연구가 진행되고 있다 .
에피폴라 영상 간의 매칭을 통하여 DSM을 생성하는 많은 연구에서 상관계수기반의 매칭 기법을 사용하고 있다(Oh et al., 2018; Oh et al., 2014). 상관계수기반의 매 칭은 주로 NCC(Normalized Cross Correlation)을 사용하 고 있으며, 설정한 임계치 값 이상일 때 매칭 점으로 사 용한다. 탐색영역에서 NCC의 임계치 값만 사용할 시 고해상도 영상 일수록 오매칭이 많이 발생한다. 이를 극 복하기 위하여 Rhee and Kim(2016)에서 다차원적인 탐 색 기법을 이용한 상관계수 기반의 매칭기법을 제시하 여 매칭의 정확도를 향상시켜 고밀도의 3차원 좌표를 생성할 수 있게 되었다 . Hirschmuller(2008)는 기존 탐색 영역에서 임계치 값을 사용하여 매칭점을 결정하는 방 법이 아닌 8방향에서 최대 16방향으로 COST 누적하여 Disparity를 계산하는 방식인 SGM(Semi Global Matching) 제시하여 스테레오 매칭 분야에서 우수한 성능을 확인 하였으며 , 최근 DSM 생성과 관련된 연구에서 많이 사 용되고 있다 . 그러나 SGM을 이용한 연구 결과의 대부 분은 해외 지역 테스트베드 영상을 이용한 실험 내용 (d’Angelo et al., 2011)으로 영상의 품질 또는 건물의 형상
등이 국내 환경과 상이하기 때문에 국내지역을 촬영한 영상에 대해 비교 실험을 통한 SGM의 효용성에 대한 검증이 필요하였다. 따라서 본 연구에서는 SGM의 실제 적인 성능을 검증하기 위한 목적으로 첫째, 국내 지역 을 촬영한 Worldview-1 입체영상에 대하여 SGM 기법을 이용하여 DSM을 생성하였다. 둘째, 생성된 DSM의 정 확도 검증을 위하여 LiDAR DSM과 고도 정확도를 비교 하였다 . 또한 SGM의 성능 비교 실험으로 연산량을 줄 이고 속도를 개선하기 위한 방안으로 COST 누적방향 을 기존 8방향에서 4방향으로 줄여 방향에 따라 생성 되는 DSM간의 정확도를 비교하였으며, 상용 소프트 웨어에서 생성한 DSM을 같이 비교하여 정확도를 확 인하였다 .
2. SGM(Semi-Global Matching)
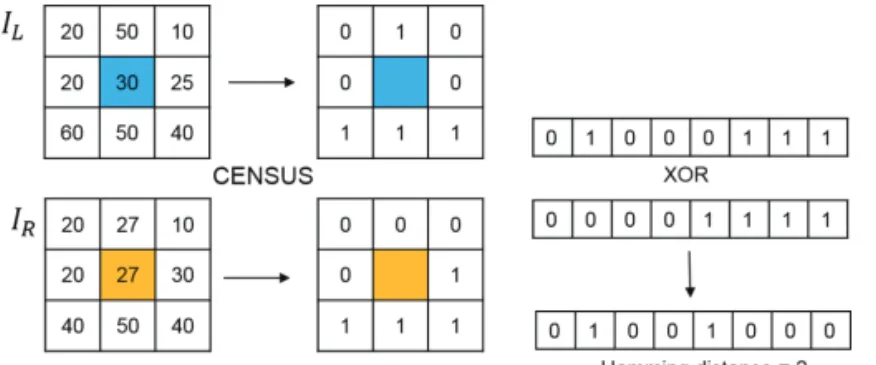
SGM은 Hirschmuller(2008)를 통해 제안된 스테레오 매칭 기법으로 기존 전역 매칭 기법을 8방향 또는 최대 16방향의 누적 COST를 계산하여 에너지를 계산하고 최소 에너지일 때의 Disparity를 결정한다. Hirschmuller 에 의해 제안된 SGM의 COST 계산방법은 MI(Mutual Information)을 사용하였으나, Hirschmuller and Scharstein (2009)의연구에서MI외다양한COST를적용하여COST 선정에 따른 SGM의 매칭 성능을 확인하였으며, 그 중 CT(Census Transform)를 적용하였을 때 매칭 성능에서 좋은 결과를 보였다 . CT는 Fig. 1과 같이 마스크 내의 중 앙 화소 값 대비 주변 화소 값이 클 경우 1, 작을 경우 0으 로 판단하여 XOR연산자를 통해 Hamming distance를 계산한다 .
Fig. 1. Census Transform for COSTs.
COST 계산 후 각 방향 별 COST를 누적하여 최소 COST를 찾게 되는데 기존 연구에서는 기본 8방향에서 최대 16방향의 COST를 누적 계산하는 방법을 제시하고 있다 . 각 방향에 대한 COST 누적 계산은 식 (1)과 같다.
L
r= C(p, d) + min(L
r(p – r, d)
L
r(p – r, d – 1) + P
1, L
r(p – r, d + 1) + P
1, (1) min L
r(p – r, i) + P
2) – min L
r(p – r, k)
ik
L
r은 방향 r에 대한 COST 누적 값이며, C(p, d)에서 p=(x, y)는 영상 좌표, d는 disparity로 d
min≤ d ≤ d
max범위 를 사용한다 . P
1은 이웃하는 화소에서의 Disparity간의 차가 1일 때 부여하는 Penalty 값이며, P
2는 Disparity의 차이가 1보다 클 때 부여하는 Penalty 값으로 P
2은 P
1보 다 큰 값을 부여하며 , COST방법에 따라 Penalty 값은 다르게 적용한다 . 방향 별 누적된 COST를 식 (2)와 같 이 S(p, d)를 계산하며 각 화소에서 최소 COST일 때의 Disparity를 최종 Disparity로 결정한다.
S(p, d) = L
r(p, d) (2) 차폐 또는 오매칭을 제거하기 위한 방법으로 좌 , 우 Disparity Map을 비교하여 제거할 수 있다. 좌영상 기준 으로 우영상을 매칭하여 Disparity Map(D
l)을 생성하고 우영상 기준으로 좌영상을 매칭하여 Disparity Map(D
r) 을 생성한다 . 생성된 D
l, D
r의 각 화소 값인 D
lp, D
rp에서
|D
lp– D
rp|≤1일 때, D
lp을 사용하며 , 1보다 클 때는 0으 로 처리하여 최종 Disparity Map(D)을 생성한다.
3. DSM 생성과정
1) DSM 생성 과정
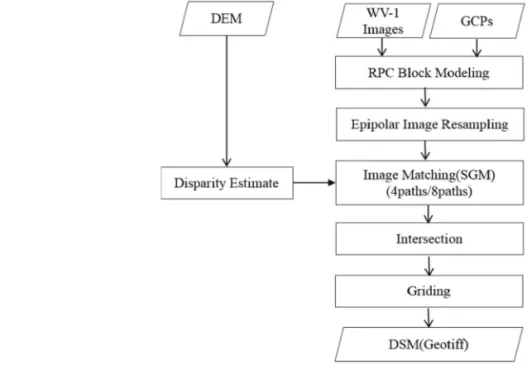
본 연구에서 입체영상으로부터 DSM을 생성하기 위 한 단계는 Fig. 2와 같다. 먼저, 기준점을 이용하여 RPC 블록모델링을 수행하여 위성영상의 RPC 오차를 보정 하고 , 에피폴라 영상을 생성한다. DEM(Digital Elevation Model)을 이용하여 입체영상 간의 Disparity의 범위를 추정한 후 SGM을 이용하여 에피폴라 영상의 매칭을 수 행하며 , 매칭 결과인 Disparity Map을 이용하여 좌, 우 영 상의 동일점을 찾아 포인트 클라우드를 생성한다. 최종 적으로 생성된 포인트 클라우드는 일정한 간격의 격자 로 나누며 GeoTIFF 포맷의 DSM을 생성한다.
2) RPC센서모델링
입체영상에 대한 센서모델링은 제공되는 RPC를 이 용하여 수행한다 . RPC의 기본 식은 지상좌표를 이용하 여 영상좌표를 계산하는 것으로 식 (3)과 같다.
∑
rFig. 2. Workflow for DSM generation.
Num
L(P, L, H)
Line = —————— · L
SCALE+ L
OFFSETDen
L(P, L, H) (3) Num
S(P, L, H)
Sample = —————— · S
SCALE+ S
OFFSETDen
S(P, L, H)
여기에서 P, L, H는 P = , L = , H = 로 계산한다 .
RPC 오차를 보정하기 위한 연구로 Grodecki and Dial (2003)는 2장 이상의 영상으로부터 3차원 위치결정 및 RPC 블록모델링 기법을 제시하였으며, Choi and Kang (2012)은 GeoEye-1와 WorldView-2 입체영상을 이용하 여 동종 영상과 이종 영상 간의 RPC 블록모델링을 수행 하여, 기준점 수량과 입체 기하에 따른 정확도 변화를 연구하였다. RPC 블록모델링을 수행하기 위하여 기존 연구 결과에 따라 영상 i, 기준점 j에 대한 관측방정식을 식 (4)와 같이 구성하였으며, RPC 조정다항식은 1차 다 항식을 사용하였다 .
Num Den F
Ly= – Line
ij+ —————— · Line
LLij ij(P, L, H) (P, L, H)
SCALEi+ Line
OFFSETi+ a
0i+ a
1i· Line
ij+ a
2i·
Sample
ij+ ε
Lij= 0 (4) Num F Den
sy= – Sample
ij+ —————— · Sample
ssij ij(P, L, H) (P, L, H)
SCALEi+
Sample
OFFSETi+ b
0i+ b
1i· Line
ij+ b
2i· Sample
ij+ ε
sij= 0
3) 에피폴라 영상 생성
에피폴라 영상을 생성하기 위하여 Oh et al.(2010)의
연구에서 Pushbroom 위성영상에서 piecewise 에피폴라 영상 제작 방법을 제시하여 많은 연구에서 활용되고 있 으며 , Sung et al.(2014)는 기존 piecewise 에피폴라 영상 제 작 방법을 기반으로 IKONOS-2, SPOT-5의 이종 영상 간의 에피폴라 영상을 제작하여 Y-시차가 1화소 이내 임을 확인하였다. 최근엔 Koh and Yang(2016)의 연구에 서 기존 에피폴라 영상 기법에 대비 화소의 축척, 수평 시차와 높이의 선형 비례성 등의 장점이 있는 통합된 piecewise 에피폴라 정렬 방법 제시하였다. 본 연구에서 는 에피폴라 영상을 생성하기 위하여 통합된 piecewise 에피폴라 정렬 방법을 사용하였다.
4) 영상분할 스테레오 매칭 기법
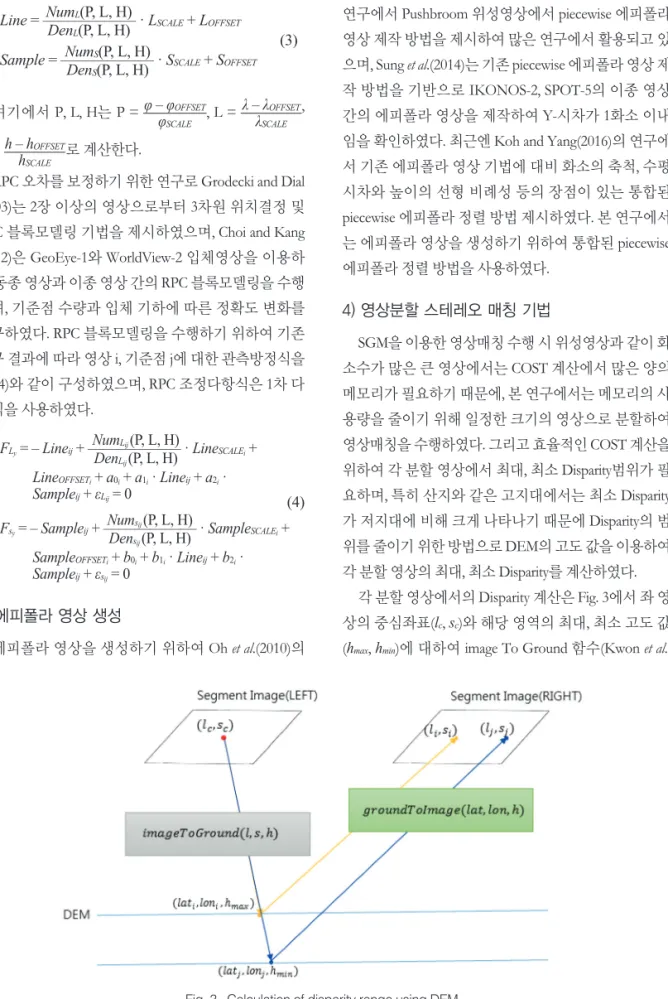
SGM을 이용한 영상매칭 수행 시 위성영상과 같이 화 소수가 많은 큰 영상에서는 COST 계산에서 많은 양의 메모리가 필요하기 때문에 , 본 연구에서는 메모리의 사 용량을 줄이기 위해 일정한 크기의 영상으로 분할하여 영상매칭을 수행하였다 . 그리고 효율적인 COST 계산을 위하여 각 분할 영상에서 최대 , 최소 Disparity범위가 필 요하며 , 특히 산지와 같은 고지대에서는 최소 Disparity 가 저지대에 비해 크게 나타나기 때문에 Disparity의 범 위를 줄이기 위한 방법으로 DEM의 고도 값을 이용하여 각 분할 영상의 최대, 최소 Disparity를 계산하였다.
각 분할 영상에서의 Disparity 계산은 Fig. 3에서 좌 영 상의 중심좌표(l
c, s
c)와 해당 영역의 최대, 최소 고도 값 (h
max, h
min)에 대하여 image To Ground 함수(Kwon et al., φ – φ
OFFSETφ
SCALEλ – λ
OFFSETλ
SCALEh – h
OFFSETh
SCALEFig. 3. Calculation of disparity range using DEM.
2014; NGA, 2010)를 이용하여 고도 값에 따른 지상좌표 (lat
i, lon
h, h
min), (lat
j, lon
j, h
max)를 각각 계산한다. 계산된 지상좌표를 이용하여 우측 영상에서의 영상좌표(l
i, s
i), (l
j, s
j)를 계산 후 식 (5)와 같이 좌측 영상의 영상중심좌표 중 s
c와 우측 영상의 영상좌표 s
i, s
j의 차이를 이용하여 최대 , 최소 Disparity를 계산하였다.
d
min= s
c– s
i, d
max= s
c– s
j(5) COST누적을 위한 방향으로 기본 8방향을 적용할 경 우 Fig. 4(a)와 같으며, r ∈ {(1,0), (-1,0), (0,1), (0,-1), (1,1), (-1,-1), (1,-1), (-1,1)}로 구성된다. 4 방향을 적용할 경우 Fig. 4(b)와 같이 구성할 경우 r ∈ {(1,0), (0,1), (1,1), (1,-1)}
Fig. 4(c)와 같이 구성할 경우 r ∈ {(1,0), (-1,0), (0,1), (0,-1)}
로 구성할 수 있다 . 본 연구에서는 각 대칭 방향을 제거 한 Fig. 4(b)와 같은 방향으로 사용하였다.
4. 실험결과
1) 실험자료
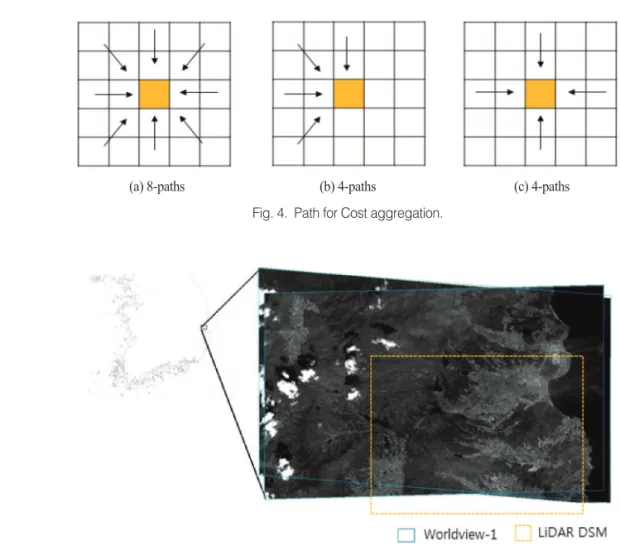
본 연구에서 사용한 실험 영상은 대한민국 경상북도 포항 지역을 촬영한 50 cm급의 WorldView-1 입체 영상 을 사용하였으며 , 실험 영상은 Fig. 5와 같으며 영상의 세부사양과 기하조건은 Table 1과 같다.
실험영상의 촬영 기하는 NGA(2011)에서 정의하고 있는 입체 기하에서 수렴각(CA : Convergence Angle)은 31.26°, 비대칭각(AA : Asymmmetry Angle)은 7.07°, 이등 분 고도각(BIE : Bisector Elevation Angle)은 71.49°로 위 치결정에 적합한 기하를 가지고 있다 (Choi, 2012; NGA, 2011).
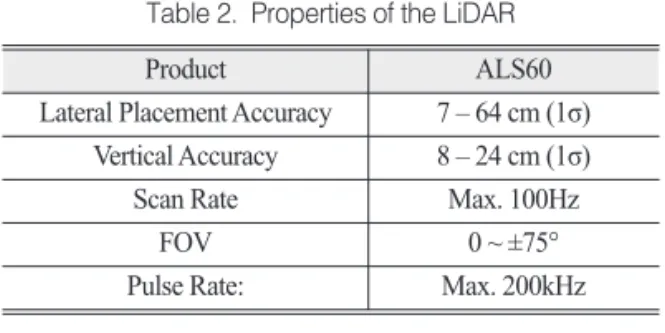
DSM의 정확도 비교를 위한 참조 데이터로 LiDAR 포 인트 클라우드로부터 1 m 격자 간격으로 생성한 DSM 을 사용하였으며 , LiDAR 장비의 사양은 Table 2와 같다.
Fig. 5. Worldview-1 Stereo Images.
(a) 8-paths (b) 4-paths (c) 4-paths
Fig. 4. Path for Cost aggregation.
DSM의 품질과 정확도를 분석하기 위하여 서로 다 른 지형적 특성을 지닌 3가지 지역을 선정하였다. 첫 번 째 실험지역 Fig. 6(a)는 평지로 대부분 논으로 이루어져 있으며 높이가 낮은 주택지 일부와 저수지를 포함하고 Table 1. Properties of the Wordview-1 stereo images
Image Left Right
Sensor Wordview-1
Product Type Stereo 1B
Date 2014-04-22
Band Pan
Scan Direction Forward
Size (Col × Row) 35180 × 26535 35180 × 22918
GSD (m) 0.543 0.599
CA (°) 31.26
AA (°) 7.07
BIE (°) 71.49
Table 2. Properties of the LiDAR
Product ALS60
Lateral Placement Accuracy 7 – 64 cm (1σ) Vertical Accuracy 8 – 24 cm (1σ)
Scan Rate Max. 100Hz
FOV 0 ~ ±75°
Pulse Rate: Max. 200kHz
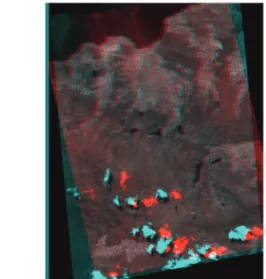
(c) WV-1 image and LiDAR DSM in Site 3
Fig. 6. Test Sites and LiDAR DSMs.
(b) WV-1 image and LiDAR DSM in Site 2 (a) WV-1 image and LiDAR DSM in Site 1
있다 . 두 번째 지역 Fig. 6(b)는 구릉지로 공장과 도로, 낮 은 산지가 포함되어 있는 지역으로 첫 번째 지역에 비 해 대체적으로 고도가 높은 지역이다 . 세 번째 지역 Fig.
6(c)는 산지로 벌목 된 지역이 일부 포함되어 있다.
2) 입체영상 센서모델링
실험지역의 입체영상에 대한 센서모델링은 제공되 는 RPC를 이용하여 수행하였다. Worldview-1의 RPC의 정확도를 확인하기 위하여 측량을 통해 획득한 기준점 을 이용하여, 좌, 우 영상의 영상좌표 오차와, 3차원 지 상좌표의 오차를 계산하였다 . 영상좌표의 오차는 Line 방향의 편의 오차 있는 것을 확인하였으며 , 초기 RPC를 이용하여 입체영상의 3차원 좌표 측정 결과 X방향으로 1.213 m의 오차가 있으며, Y방향은 0.505 m, Z방향은 0.559 m의 오차를 확인하였다(Table 3).
획득한 측량점 중 21점의 기준점과 10점의 검사점을 사용하여 블록모델링을 수행하여 센서모델의 오차를 보정하였으며 블록모델링 결과 Table 4와 같다. 전체 영 상좌표의 RMSE는 Line, Sample 모두 1화소 이내로 오차 가 보정되었으며 , 기준점과 검사점의 지상좌표 계산결 과 모두 RMSE 0.5m 이하로 초기 RPC 센서모델 대비 오 차가 보정되었다.
3) 영상 매칭 및 DSM 생성
영상 매칭을 수행하기 위하여 Koh(2016)에서 제시한 통합된 piecewise 에피폴라 정렬 방법을 이용하여 에피 폴라 영상을 생성하였으며 , 블록모델링을 통해 보정된 RPC를 이용하여 에피폴라 영상에 대한 새로운 RPC 생
성하였다 . 실험 지역에 대해 생성한 입체 영상의 에피 폴라 영상은 Fig. 7과 같으며, y시차는 1화소 이내였다.
각 실험지역은 Fig. 8과 같이 분할 영상을 생성하여 매칭을 수행하였으며 , 수치고도자료로 DTED(Digital Terrain Elevation Data)의 고도 값을 이용하여 각 분할 영상의 최대 , 최소 Disparity를 계산하였다.
SGM에서 사용한 변수 P
1는 15, P
2는 90을 적용하여 각 방향 별 COST를 누적하였다. Fig. 8과 같은 분할영상 에서 각 방향 별 COST를 누적하여 최소 COST일 때의 Disparity를 결정하여 Fig. 9와 같은 Disparity Map을 생성 하였다 .
차폐 또는 오매칭을 제거하기 위하여 좌영상을 기준 으로 생성한 Fig. 10(a)의 Disparity Map(D
l)과 우영상을 기준으로 생성한 Fig. 10(b)의 Disparity Map(D
r)의 차이 를 이용하여 매칭의 최종 결과물인 Fig. 10(c)의 Disparity
Table 3. Positioning accuracy of Worldview-1 sensor model
Image No. of Points RMSE
Line (px) Sample (px) X (m) Y (m) Z (m)
LEFT 31 1.161 0.755 1.213 0.505 0.559
RIGHT 31 3.953 0.735
Table 4. Results of RPC Block Modeling
Point Type No. of Points RMSE
Line (px) Sample (px) X (m) Y (m) Z (m)
Control 21 0.736 0.241 0.162 0.405 0.357
Check 10 0.489 0.169 0.112 0.277 0.100
Fig. 7. Epipolar Image.
Map(D)를 생성하였다.
D(i, j)에서 최소 Disparity 이상의 값들을 이용하여 좌, 우 영상의 동일점을 찾아 3차원 지상좌표를 계산하였다.
DSM을 생성하기 위하여 LiDAR DSM과 동일한 격자
간격인 1 m로 생성하여 각 화소별 계산된 3차원 지상좌 표를 할당하였으며 , 격자에 여러 점이 할당 될 경우 평 균값을 사용하였다. 그리고 보간을 위해 자연 근접 보 간법 (natural neighbor interpolation)을 사용하였다.
(a) Dl (b) Dr (c) D
Fig. 10. L/R Consistency Check.
(e) r = (1, 1) (f) r = (-1, -1) (g) r = (1, -1) (h) r = (-1, 1)
Fig. 9. Results of cost aggregation.
(a) r = (1, 0) (b) r = (0, 1) (c) r = (0, 1) (d) r = (0, -1)
Fig. 8. Segment image of epipolar image in Site 2.
4) DSM 정확도 비교
각 실험지역의 DSM은 3가지 방법으로 생성하였다.
첫 번째는 본 논문 3장에서 제시한 SGM의 4방향과 8방 향에 따라 자체 개발한 프로그램에 의해 DSM을 생성하 였다. 두 번째는 상용 소프트웨어인 BAE사의 SOCET GXP의 ASM(Automatic Spatial Modeler)기능을 이용하 여 DSM을 생성하였다. ASM은 SGM에서 일부 변경한 매칭 알고리듬으로 에피폴라 영상으로만 매칭이 가능 하다 (Zhang, 2014). 매칭에 사용된 에피폴라 영상은 모 두 동일한 영상을 사용하였다 .
RPC 블록모델링 결과 수평오차는 최대 0.5 m 이내로 LiDAR DSM과 생성된 DSM의 수평위치는 일치한다는 가정하에 DSM의 정확도 비교를 위하여 생성한 DSM과 LiDAR DSM의 각 화소별 오차 값으로 제작한 오차 지 도와 오차들의 히스토그램을 생성하여 위치에 따른 오 차크기와 오차분포를 확인하였다 .
Fig. 11은 첫 번째 지역의 DSM으로 4방향과 8방향으 로 생성한 DSM으로 논 경계부분과 일부 수목지역도 잘 나타나고 있으나 저수지에서는 매칭이 되지 않아 3 m 이상의 오차를 보이고 있다 . SOCET GXP의 DSM의 경
(c) DSM using Socet GXP ASM
Fig. 11. Comparison of DSMs in Site 1 (unit : m).
(b) DSM using SGM 8-paths cost aggregation (a) DSM using SGM 4-paths cost aggregation
우 저수지에서 비교적 매칭이 잘 되었으나 3가지 방법 모두 주택 단지에서는 매칭이 잘 되지 않았으며 , 오차 지도에서 저수지를 제외한 3가지 방법 모두 동일한 지 역에서 오차를 보여주었다 . Fig. 12은 두 번째 지역의 DSM으로 건물과 도로, 산지가 모두 생성되었지만 3가 지 모두 경계부분에서 큰 오차를 보여주고 있다. 경계 지역은 첫 번째 지역에 비해 고도차가 큰 지역으로 차 폐로 인하여 제대로 매칭되지 않아 6 m 이상의 오차를 보여주고 있으나 경계지역 내에서는 양호한 결과를 보 여주고 있다 . 3가지 중 8방향으로 제작한 DSM이 가장 좋은 품질을 보여주었다 . Fig. 13은 세 번째 지역의 DSM
으로 산지 우측 벌목 지역은 매칭이 잘 되어 2 m 이내의 오차로 양호한 결과를 보여주고 있지만 , 좌측 나무가 많 은 지역에서는 오매칭으로 홀이 발생하였으며 8 m 이 상의 큰 오차를 보이고 있다 . 4방향의 경우도 8방향과 동일한 지역에서 홀이 발생하였으며 , 10 m이상의 오차 로 8방향 대비 오차가 증가하였다. SOCET GXP의 경우 오차의 범위는 8방향과 유사하지만 육안 확인 시 홀이 발생하지 않았으며 , 3가지 중 가장 품질이 좋은 것으로 확인되었다 .
Table 5에서 각 지역별로 DSM 생성방법에 따른 오차 결과를 정리하였다 . 실험지역 1과 3에서는 SOCET
(c) DSM using Socet GXP ASM
Fig. 12. Comparison of DSMs in Site 2 (unit : m).
(b) DSM using SGM 8-paths cost aggregation (a) DSM using SGM 4-paths cost aggregation
(c) DSM using Socet GXP ASM
Fig. 13. Comparison of DSMs in Site 3 (unit : m).
(b) DSM using SGM 8-paths cost aggregation (a) DSM using SGM 4-paths cost aggregation
Table 5. Results of DSMs height errors (unit : m)
Sites Matching Method
μ
RMSE LE90 3σSite 1
4-paths 0.695 1.647 2.456 4.479
8-paths 0.647 1.550 2.318 4.227
SOCET GXP 0.589 1.476 2.225 4.059
Site 2
4-paths 0.079 2.731 4.491 8.190
8-paths -0.011 2.466 4.056 7.398
SOCET GXP 0.250 2.907 4.764 8.689
Site 3
4-paths 2.915 3.689 6.048 11.031
8-paths 0.133 3.106 5.104 9.309
SOCET GXP 0.028 2.868 4.717 8.603
GXP의 DSM이 RMSE 1.476 m와 2.868 m로 가장 적은 오차를 보였으나 실험지역 2에서는 본 연구에서 8방향 으로 매칭하여 생성한 DSM이 RMSE 2.466 m로 오차가 가장 적었다 . 4방향으로 매칭하여 생성한 DSM의 경우 RMSE가 최소 0.17 m에서 최대 0.82 m의 상대 오차를 보 이고 있으며 , 실험지역 1과 실험지역 2에서는 나머지 방 법과 비슷한 정확도를 보이고 있으나 실험지역 3의 경 우 다른 실험지역 대비 2 m 이상의 상대적으로 큰 오차 들이 발생함을 확인하였다 . 실험지역 3의 나무가 많은 지역에서 오매칭으로 10 m 이상의 큰 오차가 일부 발생 하기 때문에 LE90과 는 증가하는 것으로 판단된다. 4방 향의 경우 전체적으로 8방향 대비 오차는 증가하였지 만 평균 약 43% 정도의 속도 개선이 있었다.
5. 결 론