Building extraction on aerial image using airborne LiDAR data
Yong-Min Kim, Young-Gi Byun, An-Jin Chang, Yong-Il Kim, Yang-Dam Eo
Seoul National University, [email protected], Seoul National University, [email protected], Seoul National University, [email protected], Seoul National University, [email protected]
Konkuk University, [email protected]
This paper studies the effect of airborne LiDAR elevation information on the building extraction of aerial image over the sub-urban area. In the sub-urban area, it is difficult to extract building only using spectral information of aerial images due to various colors of roof. Therefore, combining LiDAR data and aerial image can overcome the difficulties encountered in the heterogeneous appearance of buildings. To do this, registration and resampling of LiDAR data and aerial image were first conducted. Then, nDSM model and return information were derived from LiDAR data. Simultaneously, aerial image was segmented by comprised of automatic seed selection algorithm. Lastly, segments of aerial image were determined through the definite rule by comparing to building information of nDSM whether the segment is one of building. In order to validate the proposed method, the final result was visualized by overlaying to aerial image and the result showed higher accuracy of building detection than the result that uses only aerial image.
KEY WORDS: Building extraction, Image segmentation, Airborne LiDAR, Aerial image
1. Introduction
The urban landscape is consisted of a variety of man-made objects such as buildings, monuments, streets, roadways, and parking lots, and natural features like grasses, trees and ponds (Bailang et al, 2009). Also, these objects become complex and various as time goes on. Classification method has generally used to identify building in these objects when extracts it on the images such as satellite or aerial images. Especially, an object-based method is more used in high resolution images than a pixel- based method because the pixel-based method solely relies on the spectral information of single pixel, often resulting in noisy clutter classification pattern in case of differentiating various urban surface materials (Bar and Barnsley, 2000).
However, no single type of data, such as satellite image, can provide reliable solution to a complicated mapping task. Misclassification often exists among spectrally similar materials like building roofs and roads. Therefore, inclusion of additional independent information is needed. Combining LiDAR (Light Detection and Ranging) data and images information can be good solution to overcome the difficulties encountered in these problems. LiDAR is an active remote sensing system, which utilizes laser beam for detection and measurement to provide three dimensional information of earth surface and object.
As the 3D unique superiority, LiDAR has wide application foreground in many fields, such as 3D city models, urban planning, design of telecommunication networks, vegetation monitoring and disaster management. Especially, the advantages
of 3D urban data capturing using LiDAR are high speed, high density, high vertical accuracy and low cost against traditional photogrammetry. Building detection and reconstruction based on LiDAR point clouds data is currently a hot subject of LiDAR data processing (Zhou et al, 2009).
Therefore, LiDAR data has used in extracting building objects in urban area. Ekhatri et al. (2008) extracts high level ones in LiDAR cloud points, and then extracts building objects by eliminating the vegetation points from classification result of the aerial image. Chen et al. (2009) conducts hierarchical object oriented classification (including high building, low building, and road) by applying thresholds after generating NDWI, SSI, NDVI, and nDSM from Quickbird image and LiDAR data. However, these methods are not proper to images to apply second processing because it is a result based on LiDAR data and they may be subjective due to many threshols. LiDAR data is also used to be utilized as additional band. Lee and Shan (2003) conducted mapping of costal area by utilizing LiDAR elevation information as additional band after transforming to 11bits. However, this method has a drawback that many urban objects have heterogeneous height values at pixel level inside the footprint of each object, such as tree, shrub crowns, and buildings with a non-flat roof (Bailang et al, 2009). This factor gives bad effects to the accuracy of classification because there are various heights in same landcover.
Therefore, the objective of this work is to extract building objects on aerial image that is based on building information derived from LiDAR data.
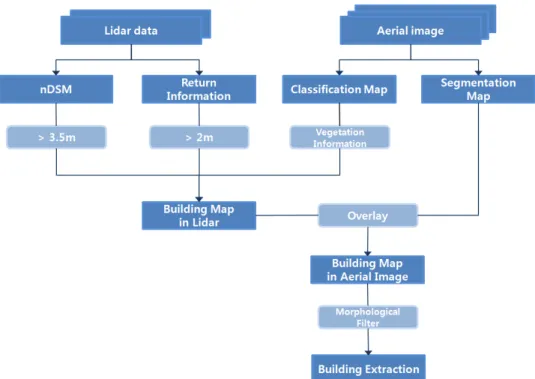
Figure 1 shows the flowchart of this study.
Figure 1. Flowchart for extraction of building on aerial image
2. Study area and data set
The study area is located in chon-an. It was selected by considering urban area of conditions that are various landcovers and roof colors. Aerial image and airborne LiDAR data were simultaneously acquired and the registrations between two data were conducted. Two data were resampled to 0.5m spatial resolution. Figure 2 show aerial image and LiDAR elevation image of study area.
(a) (b)
Figure 2. (a) aerial image (b) LiDAR elevation image of study.
3. Experiment
3.1 Building extraction in LiDAR
Building extraction using LiDAR data is conducted through nDSM, return information, and pre- classification. nDSM and return information was derived from LiDAR and DEM used in this process was made through the method proposed by Lee et al.
(2005). Return information are values that subtract last return from first return. Pre-classification is used to extract vegetation information and input bands for classification include intensity information of LiDAR data except to red, green, and blue bands.
In order to extract building objects from three data, next conditions were applied.
■ nDSM > 2m
■ return information ≤ 1m
■ ≠ vegetation area
(a) (b) Figure 3. (a) nDSM (b) pre-classification 3.2 Segmentation of Aerial image
We segment image using a segmentation method suggested by previous research, which consists of a method comprised of automatic seed selection, the modified seeded region growing (SRG) and region merging.
Initial seed points were extracted through the block-based seed selection that uses the obtained
(a) (b)
(c) (d)
Figure 4. the result of each step (a) building pixels from LiDAR (b) segmented image (c) extracted building objects after applying the definite rule (d) the result after closing process.
multispectral edge and multispectral information in a local region. Initial segmentation is achieved by applying the modified SRG procedure, which integrates geometry structural and multispectral information to provide homogenous image regions with accurate and closed boundaries. Finally, we obtain the final segmentation result through a region adjacency graph (RAG)-based region-merging process, which merges the initial segments via a homogeneity cost measure that combines regional spectral and texture information.
3.3 Temporary building extraction through overlaying
Segments of aerial image are determined by definite whether they are building segment or not after overlaying to building pixels extracted from Lidar data. If the area of building pixels forms more than 50 percent of one segment, the segment is classified to building object. This process is applied to all segments of aerial image.
3.4 Applying morphological filter
This step is post-processing using morphological filtering and filling a boundary made at segmentation process. Closing method is used in this step and kernel size is 3x3. After this filter, final building object is extracted as building shape in aerial image.
Figure 5. image overlaying the final result to aerial image.
4. Result and Discussion
Building pixels from Lidar data and segmented image are overlaid. Building objects are extracted through the definite rule. Figure 4(a) is building pixels and figure 4(b) is segmented image. Figure 4(c) shows extracted building objects after applying the definite rule. There are still boundaries between building objects at this result. Therefore, figure 4(d) shows that closing process is applied to the result. In order to visualize the final result, it was overlaid to aerial image (figure 5).
Buildings that are higher than 2m in experimental site extracted through the proposed method. Also, although it is generally difficult to extract attribute cover by shade, building areas covered by shade were well extracted due to using Lidar data for building extraction. However, some vegetation areas were extracted to building area because they were not classified to vegetation class in the pre-classification step. This problem comes from not using NIR band.
If NIR band is used in this process, the accuracy of final result may become high and pre-classification step, also, may be skipped by using NDVI.
5. Conclusion
In this paper, we proposed the method that extracts building area on aerial image by combining LiDAR data and aerial image. The method extracts building pixels from LiDAR and then, does building objects on the aerial image by overlaying the result to segmented aerial image through the definite rule. In order to validate the proposed method, the final result was visualized by overlaying to aerial image(RGB composition). In this result, we confirmed that the
buildings that are higher than 2m were well extracted through the proposed method. However, there was the problem that vegetation area was extracted to building area because of use of limited spectral information in pre-classification step. However, we judge that this problem may solve through using NIR band.
In the future, we will focus on the extraction of accurate DEM and use of NIR band in this method.
Acknowledgement
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MEST) (No. 20090085392).
References
Bailang Y. and H. Liu, L. Zhang and J. Wu, 2009, An object-based two-stage method for a detailed classification of urban landscape components by integrating airborne LiDAR and color infrared image data: A case study of downtown Houston , Urban Remote Sensing Event, 2009 Joint.
Barr, S. and M. Barnsley, 2000, Reducing structural clutter in land cover classifications of high spatial resolution remotely-sensed images for urban land use mapping, Comput.Geosci., vol. 26, pp. 433- 449.
Chen. Y., W. Su, J. Li and Z. Sun, 2009, Hierarchical object oriented classification using very high resolution imagery and LIDAR data over urban areas, Advances in Space Research, vol. 43, pp.
1101–1110.
Ekhtari, N., M. R. Sahebi, M. J. Valadan Zoej, A.
Mohammadzadeh, 2008, Semi-Automatic building extraction from LIDAR Data and High- Resolution Image, Map India 2008.
Lee, D. S. and J. Son, 2003, Combining Lidar Elevation Data and IKONOS Multispectral Imagery for Coastal Classification Mapping, Marine Geodesy, vol. 26: 1, pp.117-127.
Lee, J. H., S. H. Han, K. Y. Yun, Y. I. Kim and B. K.
Lee, 2005, Automatic generation of DEM using LiDAR data, The Korean Society for GeoSpatial Inforamtion System, 13, 4, pp. 27-32.
Zhou, M., B. Xia, G. Su, L. Tang and C. Li, 2009, A classification method for building detection based on LiDAR point clouds, Urban Remote Sensing Event, 2009 Joint.