CopyrightⓒKROS
1. 서 론`
비정형 환경에 적용하기 위한 뱀 로봇 개발
Development of a Snake Robot for Unstructured Environment
신 호 철†, 김 창 회1, 이 흥 호2
Shin Hocheol†, Kim Chang-Hoi1, Lee Heung-Ho2
Abstract This paper shows the development of a snake robot (KAEROT-snake V) which consists of 16 1-DOF actuator modules and head module. The modules are connected serially and the joint axis of each module is rotated by 90° with respect to the previous joint so that the snake robot can move in the 3D space. A tail actuator module includes slip-ring and metal connector. KAEROT-snake IV developed in prior research could move in the 3D space and climb up in a narrow pipe. But its design was not appropriate to the unstructured tough environment and its speed was somewhat slow. A new actuator module is designed to enclose all parts of the module so that any wire is not exposed. The size and weight of the new module was slightly reduced. And the rotation speed and torque of the joint was increased by about twice when compared with pre-module. An embedded controller was developed so small that it can be mounted inside the module. The performance of the developed robot was demonstrated through various locomotion experiments.
Keywords: Snake robot, 1-DOF Actuator Module, Unstructured Environment, 3D Space
1. 서 론
뱀보다 빠르게 이동할 수 있는 동물들은 많이 있다. 그 러나 뱀은 가늘고 긴 몸체 때문에 다른 동물들과 비교해 서 이동할 때 장점을 갖고 있다. 뱀은 긴 몸으로 기어서 이동하기 때문에 이동 형태가 매우 안정적이며 비정형 환 경에서 적응성이 뛰어나다. 또한 뱀은 좁은 구멍이나 틈 을 쉽게 통과할 수 있고 높은 수직 장애물을 극복할 수 있다. 이러한 장점들 때문에 수십 년 동안 뱀의 운동 특성 을 분석하거나 뱀 로봇을 개발하는 연구가 계속 이루어지 고 있다. 또한 뱀 로봇을 개발하여 재난환경에서 인명탐 색, 구조, 산업현장에서 검사, 사회 안전 또는 군용 분야의 감시/정찰 등의 작업에 적용하려는 연구가 이루어 지고
있다.
초기에 개발된 뱀 로봇들은 대부분 평면 위에서만 움직 일 수 있었고, 단지 실제 뱀의 운동을 부분적으로만 모방
하였다[1-3]. 이렇게 평면에서만 움직이는 뱀 로봇들은 지면
마찰의 이방성을 얻기 위해서 보통 수동 바퀴를 장착하고 있다. 그러나 수동 바퀴가 복잡하고 어지럽혀진 환경에서 잘 동작하지 못하기 때문에 수동 바퀴를 장착한 뱀 로봇 들은 실제 환경에서 사용하기에 실용적이지 않다[4]. 톱니 모양의 능동 바퀴를 이용하여 야지 구동과 나무등반이 가 능한 뱀 로봇[5]도 개발된 바 있으나 바퀴가 크기가 몸통보 다 커져 로봇의 단면이 커진다.
Liljeback 등[4]은 그 동안 개발된 로봇에 대해 훌륭한 비 교 분석을 하였으며 앞으로의 실제 뱀 로봇의 연구 방향 을 제시하였다. 미래의 뱀 로봇이 적용될 실제 환경은 깨 끗한 실험실이나 평지와 같은 환경이 아닌, 장애물들이 복잡하게 어지럽혀져 있거나 등반이 필요한 험지 또는 야 지와 같은 미지의 비정형 환경이며, 이러한 환경에서 이
Received : May 2. 2013; Reviewed : May 29. 2013; Accepted : Jul. 25. 2013
※ This work was supported by the Fundamental Science Cooperative Research Project: Convergence Seed Challenge (Seed-11-3)
1 Korea Atomic Energy Research Institute ([email protected])
2 Chung Nam National University, Korea([email protected])
† Corresponding author: Korea Atomic Energy Research Institute , daedeok-daero, Yuseong-gu, Deajeon, Korea ([email protected]),
동 가능하기 야 한다. 또한 서는 일반적으 다. 이것이 가 토크 비율이 소형, 경량 그 다. 따라서 로 록 뱀 로봇의 있다[6-9].
뱀이 협소구 수 있는 장점 지름을 작게 그 는 것이 중요하 응할 수 있는 하였다.
여기서 링크 1-DOF 모듈을 모듈의 길이에 교차로 배열한 기 때문에 최소
본 연구에서 능하고 이전 더 협소한 통 뱀 로봇, KAER
본 논문의 구 연구를 소개하 웨어에 대하여 대한 고찰, 마 내었다.
먼저, 이 장 snake 들을 살 개념을 살펴보
위해서는 뱀 로 한 뱀 로봇이 비
으로 몸체의 일부 가능하기 위해서 일정 수준 이상 그리고 강력한 관 로봇 무게 대 작동 관절 기구를 개
구역 또는 좁은 을 살리기 위해 그리고 몸체가 하다. 이에 따라 는 능력의 지표로
크 길이 l은 2-D 을 90°씩 교차로 에 해당한다. 실제 한 로봇의 경우는
소 굽힘 반경이 서는 3차원 공간
연구에서 개발한 통로를 이동할 수
ROT-snake V를 구성은 다음과 하고, 2장에서는 여 소개하고, 4장 마지막으로 5장에
2. 기구
장에서는 이전 살펴보고 본 연구 보고자 한다.
로봇이 3차원 움 정형 환경에서 부분을 들어올릴 서는 로봇의 무
상이 되어야 한 관절 작동 기구가
동기 토크 비율이 개발하려는 연구
은 구멍이나 틈을 해서는 뱀 로봇
굽혀지는 반경을 라 Yamada[8]는 좁 로 최소 굽힘 반
DOF 모듈의 길이 로 배열한 로봇의
제적으로 1-DOF 는 중간의 모듈이
조금 더 작아질 간의 비정형 환경 한 KAEROT-sna 수 있으며 환경에
개발하였다.
같다. 1장에서는 기구, 3장에서는 장에서는 KAER 에서는 본 연구의
구 설계
연구에서 개발 구에서 개선하고
움직임이 가능해 이동하기 위해 릴 수 있어야 한 무게와 작동기의 한다. 다시 말해, 가 매우 중요하 이 극대화 되도 구도 이루어지고
을 쉽게 통과할 몸체의 단면의 을 작게 개발하 좁은 환경에 적 반경 Rmin을 제안
(1)
이 이기 때문에 의 경우는 2개의 F 모듈을 90°씩 이 회전 가능하 질 수 있다.
경에서 이동 가 ake IV [8] 보다 에 더욱 강인한
는 서론과 관련 는 회로, 소프트 ROT-snake V에 의 결론을 나타
발된 KAEROT- 고자 했던 설계 해 해 한
, 하 도 고
할
하
안
)
에
하
가 다 한
련 트 에 타
- 계
Fig. 1은 III은 상용 든 2-DO 수 있도록 경이 80m 해 무게가 하였을 때 KAER 록 몸체를 절에서 더 DOF 작동 력전원은 이기 위해 기억 박스 듈은 외경 다. Fig. 2 내부지름 두 개의
Fig
은 KAEROT-sna 용 1-DOF RC 서 OF 작동기 모듈
록 하였다[10]. K mm인 고무 주름 가 많이 증가하 때 초기 1m 정도 ROT-snake IV는
를 더욱 경량화 더 높은 출력 토
동기 모듈을 개 은 12V에서 24V
해 모터에 유성 스를 적용하였다 경이 65mm, 길이
2는 KAEROT-sn 름 130mm 수직배
모듈을 연결하는
Fig. 1
g. 2. KAEROT-sna
ake III은 나타내 서보 두 개를 직 듈로 개발하여 3 KAEROT-snake I 름관으로 몸통을 하여, 협소한 수직
도만 승월 가능하 협소 수직 배관 화하여 토크/질량
토크를 발생시킬 개발하여 적용하 V로 높였고, 관절
감속기를 장착 다. 이렇게 개발된
이가 135mm, 무 nake IV가 11개 배관을 승월하는 는 모습을 나타
. KAEROT-snake
ake IV climbing in
내며, KAEROT- 직각으로 배치하여
3차원공간을 이 III은 방수를 위해 을 감쌌는데, 이로
직배관 이동에 하였다. 관을 이동할 수 량 비율을 높이고 킬 수 있는 경량 하였다[9]. 모터구동
절의 출력 토크를 착하고 출력단에
된 2-DOF 작동기 무게가 약 0.5kg 개의 모듈을 이용 는 모습과 브래 타낸다.
III
n a vertical pipe -snake 여 만 이동할 해 외 로 인 적용
있도 고, 관 량의 2- 동 입 를 높 워엄 기 모 이었 용하여 래킷이
본 연구에서 서도 사용할 을 개발하였다 며, 새로운 작 한 강인성 등을
Fig. 3은 새 발 개발된 모 어를 사용하지 280:1로 설계하 이전 로봇의 듈을 연결하는 KAEROT-snak 같이 몸통부분 상을 가지며, 은 58mm로 K 원통 형상의 이동방법에서 의 단면으로 구름이 쉽게 발 렵다. 따라서 을 갖도록 설계 록 하였다.
또한 그림에 구동 축이 90°
라서 수직축의 된다.
이전 모델이 선이 외부로 배관에 접촉되
Fig. 3. Ap
서는 배관 내부 수 있는 새로운 다. 새로운 뱀 로 작동기 모듈은 소 을 고려하여 설
로 개발된 작동 모듈의 효율과 속
지 않고 감속비 하였다.
의 2-DOF 모듈은 는 브래킷은 8 ke V 의 모듈의 분과 연결 브래킷
1 자유도를 갖도 KAEROT-snake I
단면은 기둥 승 더 나은 접촉 인하여 로봇이 발생하여 몸통이
로봇 모듈 몸통 계하여 로봇이
에서 알 수 있듯
° 회전하여 다음 의 위치는 두 수
이 브래킷 가운데 노출되어, 배관 되지 않지만, 야
ppearance of a m
이외의 비정화된 운 뱀 로봇, KA
로봇의 핵심은 소형, 경량, 고출
계되었다.
동기 모듈을 나타 속도를 높이기 비를 이전 모델
은 몸통은 원통 각의 형상을 갖 의 외형은 Fig. 3에 킷 부분의 단면이 도록 설계되었다 IV의 모듈 보다 승월이나 횡방향
조건을 제공한 직선형태를 취했 이 일정한 자세를 통에 90° 간격으로 일정한 자세를
듯이 1-DOF 모듈 음 모듈과 직렬로 수평축 사이에 대
데로 지나가는 관 내부로 이동할 야외 환경에서 나
module of KAEROT
된 야외 환경에 AEROT-snake V, 작동기 모듈이 출력, 환경에 대
타낸다. 새로 개 위하여, 워엄기 델의 2/3 이하인
통형이었으나 모 갖고 있었으나, 에 나타낸 바와 이 모두 원통형 다. 원통의 지름 다 10% 작아졌다 향 구름과 같은 한다[7]. 원통형상 했을 때 횡방향 를 유지하기 어 로 길이방향 홈 유지하기 쉽도
듈들이 연속되는 로 연결되고, 따 대칭으로 놓이게
전원선과 통신 할 때는 전선이 나뭇가지와 같은
T-snake V 에
,
개
인
모 , 와
름 다. 은 상 향
홈 도
는 따 게
신
은
물체에 걸 발된 작동 베어링 가 브래킷 내 전서니 외 에서 이동 전선이 으로 통과 전선의 꼬 발생하지 부의 충 (6061)으로
Fig. 4는 수 있듯이 제외한 하 외팔보 와는 달리 래킷을 바 장착할 수 듈의 상대 부분)을 수평 회전 게 하여 위치할 수 몸통의 길 일정한 방 원통 모양 로봇이 직
[Fig 4]
걸릴 수 있는 위 동기 모듈은 Fig 가운데로 전선을 내부를 지나서 외부로 드러나지 동할 때 작은 장 이 베어링 가운데
과한다는 것을 의 꼬임이 적으며, 지 않는다. 또한 충격 등에도 강
로 제작하였다.
는 모듈의 구조를 이 모듈과 모듈은 하우징 부분이 좌 보 형태로 모듈이
리, 축에 연결되 바꿔 장착할 수 수 있기 때문에 대적으로 무거운
좌우로 번갈아 전을 담당하는 모
뱀 로봇의 무게 수 있다. 조립된 길이 방향 홈과 방향으로 자세를 양의 외부에 90 직선 자세를 취할
Assembly drawin
위험성이 존재했 g. 3 좌측 그림 을 통과시키고 다
다음 모듈 몸통 지 않게 하였다 장애물에 강인한 데를 통과한다는 의미하며 모듈이
전선의 길이 변 부품 별 체결 강하도록 하우징
를 나타낸 조립도 은 양단 지지로 좌우 대칭으로 이 연결되는 CM 되는 브래킷과 전 수 있다. 이 두 개
, 수직 회전을 운 부분 (기어열 아 배치하여 좌우
모듈은 무거운 게 중심을 원통 된 뱀 로봇은 단 과 더불어 무게 중
를 쉽게 유지할 0° 간격으로 홈 할 때도 쉽게 자
ng of a module o
했다. 그러나 새로 의 윗부분에 보 다음 모듈의 오 통 내부로 연결 다. 따라서 야외 한 특성을 갖는다
는 것은 회전 축 이 ±90°로 회전할
변화나 피로가 특성을 고려하고 징은 알루미늄
도이다. 그림에서 로 연결되며 브래
설계되었다.
MU의 Unified Sn 전선이 연결되는 개의 브래킷을
담당하는 모듈은 열이 존재하는 출
우 균형을 유지 부분을 아래로 단면에서 아래 단면이 원통형이
중심을 아래로 할 수 있으며, 모 홈을 갖도록 하여
자세를 유지할 수
of KAEROT-snake 로 개 보이는 오른쪽 결시켜, 환경 다.
중심 할 때 거의 고 외 합금
서 알 래킷을
nake[7]
는 브 바꿔 은 모 출력축 하고, 향하 쪽에 이지만 하여 모듈의 여 뱀 수 있
e V
도록 하였다.
Fig. 5의 위에 그림은 머리 모듈과 16개의 몸통 모듈을 이용해 직선자세로 조립한 KAEROT-snake V 를 나타낸다.
이 때, 전체 길이는 약 0.95m 이다. 전체 무게는 슬립링이 장착된 꼬리부분과 커넥터를 포함 했을 때 약 3.9kg 이다.
뱀이 협소구역 또는 좁은 구멍이나 틈을 쉽게 통과할 수 있는 장점을 살리기 위해서는 KAEROT-snake V는 몸 체 단면의 지름을 이전 로봇보다 10% 작게 설계하였고, 또한 몸체가 굽혀지는 반경을 최소로 하기 위하여 모듈의 최대 굽힘 각을 ±90°로 설계하였다. 위의 그림에서 KAEROT-snake V의 모듈이 ±90°으로 굽혀질 수 있음을 확인할 수 있다.
연속한 두 축 사이의 거리도 통과할 수 있는 협소 구역 을 나타내는 지표이며 KAEROT-snake V의 연속한 두 축 사이의 거리는 55.75mm 이고, 연속한 평행축의 거리는 111.5mm 이다. 따라서 최소 굽힘 반경 Rmin은 55.75mm 가 된다. 이전에 개발된 3차원 동작을 할 수 있는 유명한 뱀 로봇들의 최소 굽힘 반경을 살펴보면[8], ACM-R5가 205mm, Aiko가 147mm, OBLIX가 214mm로 대부분 100mm 이상이다. CMU의 Unified Snake[7]은 1자유도 모듈의 축간 거리가 50.8mm, 최대 굽힘각이 ±90°로, 최소 굽힘 반경은 50.8mm인 것을 알 수 있으며, KAEROT-snake V의 최소 굽 힘 반경과 비슷하다. 따라서 KAEROT-snake V의 굴곡진 협소구역에서 이동 능력이 뛰어날 것으로 예상할 수 있다.
모듈을 구동하기 위해 정격 18V DC 모터를 24V의 PWM으로 구동하였다. 모터의 18V 무부하 회전수는 10,000rpm 이고, 정격 토크는 9.81mNm이다. 감속기어의 재질은 큰 토크를 견딜 수 있도록 금속을 사용하였다.
24V로 구동했을 때 감속기 출력단에서 회전 속도는 실험
적으로 약 44rpm까지 나오는 확인하였다(모터 단에서 12,320rpm). 출력 토크는, 기어박스의 효율을 0.75로 가정 했을 때, 기동 토크는 약 13.8 Nm이다. 브래킷을 포함한 모듈 하나의 무게는 0.213 kg으로, 주어진 출력 토크로 모 듈 4개를 들어 올릴 수 있다. 확인된 모듈의 속도와 토크 로부터 개발될 뱀 로봇의 크기에 대한 이동 속도와 같은 성능이 뛰어날 것으로 예상할 수 있다.
브래킷의 무게를 포함한 두 개 모듈의 무게가 0.426 kg 으로 이전 2-DOF 모듈보다 무게는 약간 작아지고 속도와 토크가 각각 2배정도 높아지고, 증대되었다. 평행 축 사이 의 거리는 139.5 mm 에서 111.5 mm로 감소하였다.
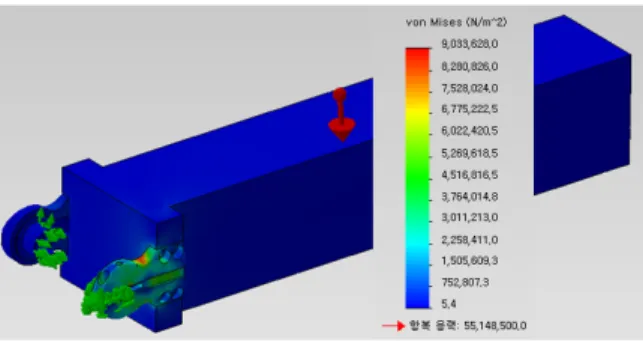
모듈 4개를 들어 올릴 때 구조적으로 하중을 가장 많이 받는 부분이 브래킷이기 때문에 브래킷에 대한 응력해석 을 수행하였다. Fig. 6은 응력해석 결과를 나타낸다.
알루미늄 합금(6061)의 항복응력 (55MPa)에 대하여 안 전율이 6.1로 브래킷이 구조적으로 충분한 강도를 갖은 것을 확인할 수 있다.
따라서 개발된 모듈을 사용함으로써 KAEROT-snake V 위에서 언급했던 비정형 환경에 적용될 뱀 로봇에게 필요 한 몸체의 일부분을 들어올릴 수 있는 능력을 지녔다고 볼 수 있다.
Fig. 7은 뱀 로봇이 감시/정찰 업무에 적용될 때 필요한 자세 중의 하나인 기립자세를 취하는 KAEROT-snake V를 나타낸다.
뱀 로봇이 이동할 때 마찰력을 증가 시키고 충격을 완 화 시키기 위하여 모듈 외부에 붙일 수 있는 완충 패드를 제작하였다. 완충패드는 모듈 하우징의 대칭성과 제작의 편리성을 고려하여 똑 같은 패드 두 개로 모듈을 감쌀 수 있도록 설계하였다.
Fig. 5. KAEROT-snake V Fig. 6. Stress analysis of the brackets
고무 패드는 탄성이 크고 재질이 단단하고 질겨서 외부 환경과 접촉에 잘 견딜 수 있으나 알루미늄 하우징 표면 에 접착이 어렵다. Wright[6-7] 등은 실리콘 고무패드를 케이 블 타이를 이용해 단단히 고정하거나 접착제를 이용하여 고무패드와 알루미늄을 접착하였다. 이전 연구[8]에서는 섬유질이 샌드위치로 포함된 고무를 표면 처리하여 접착 제를 이용하여 스테인레스 링크나 프라스틱 모듈에 접착 하였는데 고무가 두껍고 작업이 복잡하다.
이와는 달리 하드 스폰지 패드는 충격흡수가 뛰어나고 알루미늄 하우징 표면에 대한 접착이 잘 된다. 그러나 표 면이 단단하지 않고 질기지 않아서 외부 환경과 접촉할 때 내구성이 많이 떨어진다.
모듈 표면에 대한 접착성과 충격완화 성능을 유지하면 서 외부환경에 대한 마찰력을 높이고 접촉 내구성을 높이 기 위해서, 실리콘 고무가 물방울 무늬로 접착된 천으로 똑 같은 모양의 패드를 만들고 하드 스폰지 패드 위에 붙 여서 두 층으로 이루어진 완충패드를 완성하였다. 이중 완충패드는 하드 스폰지와 실리콘 도트 천으로 이루어져 제작이 쉽고 모양이 다른 부분에도 쉽게 적용할 수 있다.
Fig 8은 완충패드의 3D 모델과 제작된 실리콘도트 천 패 드(우상)와 하드 스폰지 패드(좌하)를 나타낸다.
수동 바퀴가 없고 3차원 움직임이 가능한 뱀 로봇의 주 행 방법은 횡방향 구름, 기둥승월, 계단 승월, 사이드 와인 딩, 슬리더링, 직선 전진 등 여러 가지이며 Tesch[11] 등은
이에 대하여 자세하게 기술하였다.
이 중에서 매끄러운 기둥을 승월하는 것으로 원통형상 의 단면이 주는 이점과 함께 이중 완충패드가 제공하는 압축 탄성, 높은 마찰력의 효과를 확인할 수 있다. Fig. 9는 KAEROT-snake V가 표면이 매끈한 기둥도 승월하는 모습 과 횡방향 구름을 하는 모습을 나타낸다.
뱀 로봇의 가장 적합한 임무인 탐색, 육안 검사, 감시/
정찰 등의 작업을 수행하기 위해서는 카메라가 기본적으 로 필요하다. 따라서 KAEROT-snake V는 머리 부분에 카 메라를 장착했는데, 장애물 인식 등 주행에 필요한 정보 를 추출하거나 거리정보를 얻어낼 수 있도록 두 개의 작
Fig. 7. Standing of KAEROT- snake V
Fig. 8. Adhesive backed skins for KAEROT- snake V
Fig. 9. Pole climbing and lateral rolling of KAEROT- snake V
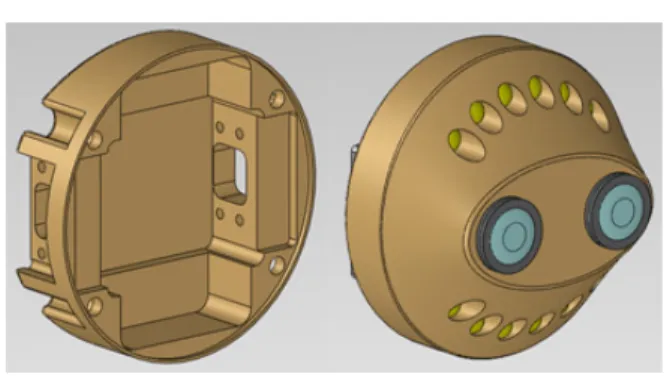
은 CCD 카메라를 장착하였다. 자체 조명으로 12개의 고 휘도 LED를 장착하였다. Fig. 10은 KAEROT-snake V의 머 리 모듈의 3D 모델을 나타낸다.
머리부는 크게 두 개의 부분으로 나누어지는데, 앞부분 에는 카메라와 LED가 장착되고 뒷부분에는 회로부가 장 착된다. 앞 부분은 타원형으로 경사지게 설계하여 미적인 감각을 살리고 홈이나 틈새를 통과할 때 쉽도록 하였다.
뒷부분의 옆면에는 몸통과 연결을 위한 홈이 설계되어 있 고 전선이 통과하기 위한 구멍이 설계되어 있다. 다른 임 무에 필요한 가속도 센서 또는 가스센서 등을 장착할 필 요가 있을 때는 중간부분 확장하여 필요한 센서들을 쉽게 장착할 수 있다.
꼬리부는 일반 모듈 뒷부분에 슬립링을 볼트 체결하여 연결하였으며 슬립링을 지나서 나온 전선을 커넥터를 이 용하여 연결하였다. 슬립링은 뱀 로봇이 횡방향 구름 이 나 기둥 승월과 같은 방법으로 이동할 때 전선이 꼬이는 것을 막아주어 이동을 자연스럽게 할 수 있게 해준다.
3. 회로 및 SW 설계
KAEROT-snake V는 16개의 1-DOF 몸통 모듈과 카메라 가 장착된 머리 모듈의 직렬 연결로 이루어 졌다. 필요에 따라서 몸통 모듈의 수는 변경할 수 있다. 머리 모듈 반대 쪽 끝의 몸통 모듈에는 전선이 연결된 꼬리부분이 볼트 체결되어 있다. 위에서 설명한 바와 같이 꼬리부분에는 슬립링이 장착되어 있으며 전원 2선, 통신 2선, 영상신호 4선, 총 8개의 선으로 이루어진 전선과 연결되어 있다.
각각의 몸통 모듈에는 하나의 제어보드와 하나의 드라 이버 보드가 장착되어 있다. 제어보드는 상위제어기와 통
신을 처리하고, 위치센서와 온도센서 데이터를 처리하고, 관절의 위치의 폐루프 제어를 수행한다. 드라이버 보드는 제어보드로부터 모터 제어 신호를 받아 24V로 모터를 구 동한다. 모터의 위치제어 알고리즘으로는 PID 제어를 사 용하였으며, 부드러운 운동을 생성하기 위하여 사다리꼴 프로파일을 사용하였다.
이전 연구에서 개발된 2-DOF 작동기 모듈은 하나의 제 어보드로 2개의 관절을 제어하였다. 따라서 같은 자유도 를 갖을 경우, KAEROT-snake V는 KAEROT-snake IV보다 2배의 제어보드가 필요하다. 2배로 늘어난 제어보드의 전 류소비를 최소화 하기 위하여 제어보드의 CPU로 저전력 소비를 목적으로 설계된 STM32F103을 적용하였다. 모터 를 구동하지 않을 때 하나의 제어보드는 24V 인가 시 약 50 mA ~ 60 mA 를 소모한다. Fig. 11은 개발된 제어보드와 드라이버 보드가 2층으로 배치되어 있는 모습을 나타낸다.
관절의 속도 및 위치제어를 수행하기 위해서 2개의 엔 코더가 사용되었다. 관절의 정숙한 속도 제어를 위해서 모터 뒤에 부착된 광학식 엔코더를 사용하였으며, 출력단 의 절대위치를 제어하기 위해서 마그네틱 엔코더를 사용 하였다. 따라서 모듈의 전원을 끄고 다시 켜도 관절의 현 재 위치를 바로 알 수 있다. 이전 뱀 로봇 KAEROT-snake IV의 모듈에는 포텐시오미터를 사용해서 출력축의 절대 위치를 측정하여 전원 인가 시 초기값이 조금씩 변동하였 는데, 새로 개발된 모듈의 출력축에는 마그네틱 엔코더를 적용하여 안정된 출력축의 절대 위치를 얻을 수 있었다.
뱀 로봇의 여러 가지 이동방법을 만들어 내기 위해서 Fig. 10. Head of KAEROT- snake V
Fig. 11. Controller and motor driver
각 관절에 필요한 각도 값은 PC에서 계산하고, CAN 통신 을 통하여 KAEROT-snake V의 각 모듈로 위치 명령을 주 기적으로 보낸다. 이전에 hobby servo를 이용하여 개발된 뱀 로봇들은 주로 RS485통신을 사용했다. RS485 통신은 통신에 필요한 구성(데이터 패킷들의 어드레스, 데이터 충 돌 방지, 전송된 데이터의 결함 발견 등)을 사용자가 프로 그램으로 구성해야 하고, 이러한 구성들은 프로그램 상에 서 수행되어야 한다. CAN 통신은 이러한 통신의 구성들 이 하드웨어적으로 처리되어 프로그램에 부하를 적게 주 고 RS485 통신 보다 더 빠른 통신속도를 사용할 수 있게 해준다. 현재 PC의 뱀 로봇 운용프로그램과 KAEROT- snake V는 1Mbps의 속도로 CAN 통신을 하여, KAEROT- snake V이 주기운동으로 이동할 때 16개의 모듈과는 40 msec의 주기(25Hz)로 위치 명령을 갱신한다.
PC의 뱀 로봇 운용프로그램에는 각 모듈의 상태를 확 인하고 전류제한 값, 속도제한 값, 온도제한 값, 속도제어 또는 위치제어에 대한 PID 게인 값들을 설정할 수 있는 탭이 있으며 이 또한 CAN 통신을 통하여 각 모듈의 파라 미터들을 변경한다. 변경된 파라미터들은 각 모듈의 CPU 내의 RAM에 저장된다.
4. 고 찰
본 연구에서 개발된 KAERI-snake V는 이전 연구에서 개 발된 KAERI-snake IV와 비교하여 성능과 내구성이 많이 향 상되어 비정형 환경에 적용할 수 있는 가능성이 높아졌다.
Table 1에 KAERI-snake IV보다 향상된 KAERI-snake V의 사양을 나타내었으며, CMU의 Unified snake robot[7]의 사양 도 함께 나타내었다.
개발된 1-DOF 모듈은 이전 2-DOF 모듈보다 지름은 10%
감소, 이웃한 평행축 간의 거리는 17%감속하였으나 관절의 회전 속도와 토크는 2배 정도 증가하였고, 관절의 운동범위 도 ±70°에서 ±90°로 증가하였다. 그리고 전선도 모두 내부 로 통과하여 외부에 드러나지 않으며, 외형이 외부에 걸리 는 부분이 많이 줄어들어 내환경성이 크게 향상되었다.
수동 바퀴가 없는 뱀 로봇의 가장 빠른 이동 방법 중 한가지는 사이드와인딩이다. Fig. 12는 3초 동안 KAERI- snake V가 사이드와인딩 방법으로 이동하는 모습을 나타
낸다.
위의 그림은 동영상에서 매 초 마다 추출한 모습이다.
실험으로부터 KAERI-snake V의 이동 속도가 약 0.25 m/s 이상인 것을 확인하였다. 뱀 로봇의 성능지표인 길이, 단 면적, 무게에 대한 이동속도로 살펴보면 KAERI-snake V의 경우 길이 1m, 단면적 0.00264m2, 무게 3.9kg에 0.25m/s로 이전에 개발된 여러 뱀 로봇과 비교했을 때 뒤지지 않는 성능을 지녔다고 판단된다[12].
5. 결 론
본 논문 에서는 비정형 환경에서 사용 가능한 뱀 로봇 개발에 대하여 연구하였다. 제안된 로봇, KAERI-snake V는 다양한 이동 방법 적용이 유리하도록 원통 모양으로 설계 되었으며 환경에 강인하도록 외형 틀은 알루미늄 합금으 로 제작되었으며, 충격을 완화하고 접촉성을 향상시키기 위하여 스폰지와 실리콘 고무가 접착된 천으로 외피를 추 가하였다. KAERI-snake V는 16개의 1-DOF 모듈과 머리 모
Table 1. Specifications of snake robots
KAEROT
- snake IV KAEROT - snake V
Unified snake robot(CMU)
DOF 2 1 1
Size(module, mm) φ65 φ58 φ50.8 Dist. between joint axes
(module, mm) 72, 67.5 55.75 50.8
No. of module 11 16 16
Length(robot, cm) 174 95 94 Mass(module, robot, kg) 0.5, 6.5 0.21, 3.9 0.16, 2.9 Gear ratio 418:1 280:1 401:1 Torque(module, Nm) 6, stall 2.1, rated 1.3, continuous
Voltage(V) 24 24 36
Data CAN CAN RS-485
Fig. 12. Sidewinding of KAEROT-snake V
듈로 구성되었다. 꼬리로 사용된 모듈에는 슬립링을 부착 하여 구름을 이용한 이동방법 시 선 꼬임 문제를 해결하 였다.
1-DOF 모듈은 크기가 소형이면서도 토크와 운동범위가 더 커지도록 기구를 설계하였으며, 전력 소모가 적은 CPU 사용하여 기본적인 전력 소모를 낮추었으며 따라서 회로의 발열도 감소 시키고, 소형화된 모듈 내부에 제어 보드와 드라이버보드가 모두 장착될 수 있도록 개발하였 다. 제어 PC와 KAERI-snake V 사이의 안정적이고 빠른 통 신을 위하여서 CAN통신을 적용하였다.
개발된 KAERI-snake V로 기립, 횡방향 구름, 기둥 승월, 사이드와인딩 등의 이동방법이 가능함을 보였다. 이와 같이 개발된 뱀 로봇 KAERI-snake V는 비정형 환경에 적 용 가능할 것으로 판단된다.
향후, 본 연구에서 개발된 뱀 로봇 KAEROT-V이 계단 등의 장애물을 극복하는 이동방법과 머리 모듈에 있는 카 메라를 이용하여 탐색 등의 작업을 수행할 수 있도록 제 어기법 등을 연구할 예정이다. 또한 비정형 환경에 적용 할 수 있는 기능을 유지하면서 더욱 협소한 구역을 이동 하고 탐색할 수 있는 더 작은 소형 뱀 로봇을 개발하고자 한다.
Acknowledgments
본 연구는 기초기술연구회 협동연구사업 융복합 Seed (국방R&D)과제의 연구비 지원으로 수행되었음.
[1] S. Hirose, Biologically inspired robots: snake-like locomotors and manipulators, Oxford University Press, Oxford, 1993.
[2] G. Miller, Snake robots for search and rescue, Neurotechnology for biomimetic robots, MIT Press, Cambridge, MA, USA, London, pp.271-284, 2002.
(Chapter)
[3] C. Ye, S. Ma, B. Li, and Y. Wang, “Turning and side motion of snake-like robot”, Proc. IEEE Int. Conf.
Robotics and Automation 2004, New Orieance, LA, April, pp. 5075-5080, 2004
[4] P. Liljeback, K.Y. Pettersen, O. Stavdahl, and J.T.
Gravdahl, “A Review on Modeling, Implementation, and Control of Snake Robots”, Robotics and Automation Systems, vol. 60, pp. 29-40, 2012.
[5] M. Lee, S. Yoo, J. Park and S. Kim, “Modular type robot for field moving and tree climbing”, J. Institute of Control, Robotics and Systems, Vol. 18, No. 2, pp. 118- 125, 2012.
[6] C. Wright, A. Johnson, A. Peck, Z. McCord, A.
Naaktgeboren, P. Gianfortoni, M. Gonzalez-Rivero, R.
Hatton and H. Choset, “Design of a modular snake robot”, Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp 2609–2614, 2007.
[7] C. Wright, A. Buchan, B. Brown, J. Geist, M. Schwerin, D. Rollinson, M. Tesch and H. Choset, “Design and Architecture of the Unified Modular Snake Robot”, Proc.
IEEE Int. Conf. Robotics and Automation (ICRA) 2012, pp. 4347–4354, 2012.
[8] H. Yamada and S. Hirose, “Study of a 2-DOF Joint for the Small Active Cord Mechanism”, Proc. IEEE Int.
Conf. Robotics and Automation, pp. 3827-3832, 2009.
[9] H. Shin, K.M. Jeong and J.J. Kwon, “Development of a Snake Robot with 2-DOF Actuator Modules”, J. Institute of Control, Robotics and Systems, Vol. 17, No. 7, pp.697-703, 2011.
[10] S. Kim, S. Jung, S. U. Lee, K. Jeong, S. Park, Y. H.
Kang, and D. Ok, “Development of Disaster-Mitigation and Life-Saving Robot in Korea,” 39th Int. Symposium of Robotics, Seoul, Korea, pp.472-476, Oct., 2008.
[11] M. Tesch, K. Lipkin, I. Brown, R. Hatton, A. Peck, J.
Rembisz and H. Choset, “Parameterized and Scripted Gaits for Modular Snake Robots”, Advanced Robotics, Vol. 23, pp.1131-1158, 2009.
[12] J.K. Hopkins, B.W. Spranklin, S.K. Gupta, "A survey of snake-inpired robot designs", Bionispiration and Biomimetics, Vol. 4, No. 2, 2009.
신 호 철 1994 인하대학교 기계공학과
(공학석사)
1998 인하대학교 기계공학과 (공학박사)
2000~현재 한국원자력연구원 융합기술개발부 책임연구원.
관심분야 : 로봇 설계 및 제어 References
이 흥 호 1977 서울대학교 공업교육과
(석사)
1994 서울대학교 컴퓨터공학과 (박사)
1979~현재 충남대학교 전기공 학과 교수
관심분야 : 전기설비 자동화, 산호처리 김 창 회
1999 한남대학교 전자공학과 (석사)
현재 충남대학교 전기공학과 (박사과정)
1987~현재 한국원자력연구원 융합기술개발부 책임연구원 관심분야 : 경로 계획 및 극한작업로봇

![Table 1에 KAERI-snake IV보다 향상된 KAERI-snake V의 사양을 나타내었으며, CMU의 Unified snake robot [7] 의 사양 도 함께 나타내었다](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5336062.392731/7.892.465.801.160.595/table-iv보다-향상된-사양을-나타내었으며-cmu의-unified-나타내었다.webp)
