서 론 1.
최 근 고 성 능 화 된 컴 퓨 터 와 유 한 요 소 전 산 해 석 프 로 그 램 의 발 전 으 로 각 종 복 잡 한 형 상 을 가 지 는 구 조 물 의 구 조 해 석 기 법 에 대 한 연 구 가 활 발 히 진 행 되 고 있 다 .
궤 도 용 차 량 은 가 혹 한 작 동 환 경 하 에 있 으 며 이 런 환 경 에 서 작 동 조 건 을 만 족 할 수 있 는 내 구 성 을 가 지 도 록 설 계 되 어 야 한 다 . 궤 도 용 차 량 의 차 체 는 차 량 주 행 시 비 틀 림 등 에 의 한 하 중 을 받 으 며 노 면 으 로 부 터 로 드 휠 을 통 하 여 전 달 되 는 동 적 하 중 에 의 하 여 진 동 하 게 된 다 . 또 한 동 력 장 치 등 차 량 의 각 종 기 능 부 품 및 장 착 부 품 이 장 착 되 어 그 지 지 기 능 을 한 다 . 이 러 한 기 능 을 수 행
하 기 위 하 여 차 체 는 강 도 적 인 측 면 및 강 성 적 인 측 면 에 안 정 성 이 확 보 되 어 야 한 다 .
궤 도 차 량 의 구 조 에 크 게 영 향 을 미 치 는 것 은 비 포 장 도 로 를 최 고 속 도 로 주 행 할 경 우 이 다 . 그 리 고 돌 발 적 인 사 태 에 직 면 하 여 요 구 조 건 이 상 의 충 격 이 차 체 에 가 해 질 수 있 으 며 이 러 한 환 경 을 설 계 시 에 고 려 하 기 위 하 여 주 행 시 차 체 에 전 달 되 는 하 중 조 건 을 고 려 하 여 구 조 적 으 로 안 전 성 을 검 증 하 고 설 계 에 반 영 하 여 야 한 다 .
궤 도 차 량 은 주 행 시 지 면 으 로 부 터 입 력 되 는 하 중 은 로 드 휠 (Road Wheel)을 통 하 여 차 체 에 전 달 된 다 . 로 드 휠 은 주 행 시 하 중 을 직 접 적 으 로 지 지 하 는 구 조 물 이 므 로 로 드 휠 주 변 의 응 력 수 준 은 설 계 에 서 요 구 되 는 허 용 하 중 이 하 로 설 계 되 어 야 한 다 . 로 드 휠 에 서 의 변 위 거 동 은 주 행 중 궤 도 차 량 의 전 체 적 인 거 동 및 로 드 휠 주 변 의 국 부 적 인 거 동 을 예 측 할 수 있 다 . 로 드 휠 의 거 동 은 사 격 시 타 격 의 정 확 성 에 영 향 을 미 치 며 차 체 에 탑 재 된 부 품 들 의 간 섭 에 도 영 향 을 미 친 다 .
본 연 구 에 서 는 궤 도 차 량 의 차 체 구 조 물 에 주 행 하 중 이 작 용 할 때 동 적 해 석 (Dynamic Analysis)을
주 행 시 궤 도 용 차 량 의 동 적 거 동 에 관 한 연 구
김 종 범 †
․
황 영 진 *․
이 석 순 **․
최 창 곤 ***․
손 재 홍 ***A Study on Dynamic Behavior of Tracked Vehicle under the Traveling Load
Jong-Bum Kim, Young-Jin Hwang, Seok-Soon Lee, Chang-Gon Choi and Jae-Hong Son
Key Words:
Traveling Load (주 행 하 중 ), Dynamic Analysis(동 적 해 석 ), Damping Factor(감 쇠 계 수 )Abstract
In this study, non-linear dynamic FE analysis of a tracked vehicle under the traveling load is performed by FE code ABAQUS. The stability of vehicle is examined using the structure analysis for the road wheel. The dynamic analysis is performed by traveling load. The traveling load include the 6 step loading spectrum about road wheel. The stress level around road wheel are 30 MPa ~ 40 MPa.
These value are indicated under modified fatigue strength 50.3 MPa. It takes about 3 second to be stable the structure after traveling load.
경 상 대 학 교 대 학 원
†
E-mail : [email protected]
TEL : (055)758-4719 FAX : (055)762-0227 경 상 대 학 교 대 학 원
*
경 상 대 학 교 기 계 항 공 공 학 부
**
국 방 과 학 연 구 소
***
수 행 하 여 관 심 부 위 인 로 드 휠 주 변 의 응 력 수 준 도 출 하 여 구 조 적 안 전 성 을 검 토 하 (Stress Level)
였 다 . 또 한 로 드 휠 주 위 의 변 위 거 동 곡 선 을 도 출 하 여 주 행 하 중 제 거 후 구 조 물 이 거 동 을 멈 출 때 까 지 의 시 간 을 검 토 하 였 다 .
본 연 구 에 사 용 한 소 프 트 웨 어 (Software)는 전 처 리 기 (Pre-Processor)로 Altair사 의 Hyperrmesh, 유 한 요 소 해 석 과 후 처 리 기 (Post-Processor)는 상 용 유 한 요 소 코 드 인 ABAQUS/Standard와 ABAQUS/CAE 를 사 용 하 였 다 .
감 쇠 계 수
2. (Damping Factor)
실 제 로 구 조 물 은 동 하 중 하 에 있 으 며 동 적 해 석 은 시 간 적 분 (Time integration)을 포 함 하 는 비 선 형 해 석 과 정 이 요 구 된 다 . ABAQUS에 서 의 비 선 형 동 적 해 석 에 서 적 분 방 법 (Integration Methods for Nonlinear Dynamics)은 Newmark Integration
를 사 용 한 다
Method .1
에 서 는 사 용 된
ABAQUS Artificial damping factor 은 비 선 형 동 적 해 석 수 행 시 해 의 수 렴 성 에 영 향 을 미 치 며 주 행 하 중 에 대 한 구 조 감 쇠 값 은 0(No-Damping) ~ ― 0.33(Maximum Damping) 사 이 의 값 을 취 할 수 있 는 데 본 해 석 에 서 는 ABAQUS 에 서 추 전 하 는 -0.05를 취 하 였 다 .
에 서 구 조 물 의 감 쇠 는 다 음
ABAQUS (Damping)
에 나 타 낸 식 과 같 이 Rayleigh Damping 이 론 을 사 용 한 다 . [1]
[ ] α [M] + β [K]
C =
여 기 서 α 와 β 는 각 각 의 재 료 에 대 하 여 상 수 로 가 정 된 다 . Rayleigh Damping 이 론 에 서 시 스 템 내 의 감 쇠 는 질 량 (Mass)과 강 성 (Stiffness)에 비 례 한 다 고 가 정 한 다 . 하 나 의 자 유 도 를 가 지 는 시 스 템 에 서 의 Damping Fraction은 다 음 과 같 이 α 와 β 값 으 로 표 현 할 수 있 다 .
n n
n
ζ(ω ) α + β ω
2ω 2
=
여 기 서 저 주 파 영 역 의 모 드 는 주 로 α 값 (Mass 에 의 하 여 지 배 되 고 Proportional Damping Term)
고 주 파 영 역 의 모 드 는 주 로 β 값 (Stiffness 에 지 배 된 다 본 연 구 Proportional Damping Term) .
에 서 동 적 해 석 을 수 행 함 에 있 어 서 관 심 있 는 거 동 은 주 로 저 주 파 영 역 에 해 당 하 므 로 α α( :
값 을 일 반 적 으 로 Mass Proportional Damping Term)
사 용 하 는 1.004725로 사 용 하 고 β 값 은 Default 값 인 0를 취 하 여 해 석 을 수 행 하 였 다 . 여 기 서 α 값 의 차 원 은 [ ]T -1이 다 .
해 석 모 델 및 해 석 방 법 3.
유 한 요 소 모 델 링 3.1
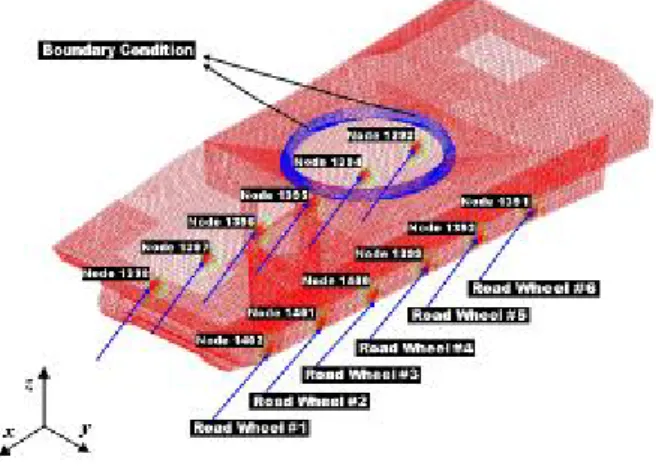
구 조 물 의 3차 원 모 델 링 은 CATIA V5를 사 용 하 였 으 며 Fig. 1은 유 한 요 소 모 델 링 이 완 성 된 궤 도 차 량 의 하 부 구 조 물 을 나 타 낸 다 . 차 체 구 조 물 은
차 원 를 사 용 하 여 모 델 링 을 수 행 하
2 Shell element
였 다 . 모 든 차 체 판 재 의 두 께 는 50.0 mm로 가 정 하 였 다 . 모 델 링 에 사 용 된 Shell 요 소 의 종 류 는 요 소 이 며 유 한 요 소 모 델 링 에 사
ABAQUS S4R
용 된 요 소 의 수 는 총 26,578개 이 며 절 점 의 수 는 개 가 사 용 되 었 다 재 료 의 물 성 치 는
26,152 . Table 1
에 나 타 내 었 다 .
Fig. 1 Finite Element Modeling
Table 1 Material Properties Comp.
name
Young's modulus ( )
Yield Strength
( )
Modified fatigue strength( )
Poisson's ratio
Density ( / )
Chassis 72.39 372 50.3 0.33 2,710
하 중 및 경 계 조 건 3.2
궤 도 차 량 이 운 행 중 지 면 으 로 부 터 받 는 주 행 하 중 은 로 드 휠 (Road Wheel)로 부 터 차 체 로 전 달 된 다 . 궤 도 용 차 량 에 총 12개 의 로 드 휠 이 있 으 며 Fig. 1 에 서 나 타 낸 것 과 같 이 차 량 전 방 부 터 좌 우 한 조 씩 Road Wheel #1 ~ Road Wheel #6까 지 번 호 를 부 여 하 였 다 . 주 행 하 중 은 각 로 드 휠 을 강 체 요 소 를 이 용 하 여 생 성 시 킨 점 에 서 입 (Rigid Element)
력 하 였 다 .
차 체 의 주 행 해 석 시 관 심 부 위 의 변 위 거 동 을 보 기 위 하 여 12개 의 절 점 (Node)을 선 정 하 였 으 며 그 위 치 는 Fig. 1에 나 타 낸 것 과 같 이 로 드 휠 에 서 주 행 하 중 이 입 력 된 12개 의 절 점 (Node)이 다 .
주 행 하 중 은 차 량 주 행 시 발 생 되 는 하 중 으 로 이 론 적 계 산 으 로 결 정 하 기 어 려 우 므 로 경 험 적 인 방 법 에 따 른 다 . 주 행 하 중 은 극 한 하 중 으 로 서 최 소
의 안 전 계 수 가 적 용 된 하 중 으 로
1.5 (Safety Factor)
서 별 도 의 안 전 계 수 를 요 구 하 지 않 는 다 . 유 한 요 소 해 석 에 사 용 된 주 행 하 중 은 Table. 2에 나 타 내 었 다 . 주 행 하 중 은 Table. 2와 같 이 총 6가 지 Step 을 적 용 하 였 다 .
Table 2 Applied Load for Dynamic Analysis Step Force
Direction RW
# 1 RW
# 2 RW
# 3 RW
# 4 RW
# 5 RW
# 6
Step 1 (kN)
-x 460 150 140 95 80 70
z 200 90 65 55 50 60
Step 2 (kN)
-x 230 300 140 95 80 70
z 100 180 65 55 50 60
Step 3 (kN)
-x 230 150 280 95 80 70
z 100 90 130 55 50 60
Step 4 (kN)
-x 230 150 140 190 80 70
z 100 90 65 110 50 60
Step 5 (kN)
-x 230 150 140 95 160 70
z 100 90 65 55 100 60
Step 6 (kN)
-x 230 150 140 95 80 140
z 100 90 65 55 50 120
해 석 에 적 용 한 경 계 조 건 (Boundary Condition)은 에 서 나 타 낸 것 과 같 이 차 체 상 부 의 레 이 스 Fig. 1
링 (Race Ring) 부 위 에 모 든 자 유 도 (1~6)을 구 속 하 였 다 . 해 석 은 차 체 의 자 중 을 고 려 하 여 총 4초 간 수 행 하 였 다 . 여 기 서 해 석 시 작 후 1초 까 지 는 구
조 물 의 자 중 이 적 용 되 도 록 하 였 다 .
에 주 행 시 로 드 휠 에 작 용 하 는 동 하 중 의 Fig. 2
이 력 을 나 타 내 었 다 . Fig. 2에 나 타 낸 것 과 같 이 한 번 의 주 행 하 중 이 구 조 물 에 작 용 하 는 시 간 은 초 이 며 여 기 서 주 행 하 중 이 작 용 한 곳 은 해 0.04
석 수 행 후 1.2 , 1.4 , 1.6 , 1.8 , 2.0 , 2.2초 초 초 초 초 초 에 서 각 각 Step 별 로 총 6번 의 하 중 을 로 드 휠 에 입 력 하 였 다 .
Fig. 2 Traveling Load Spectrum
동 적 해 석 수 행 시 시 간 증 분 (Time Increment)값 를 결 정 하 기 위 하 여 먼 저 구 조 물 에 대 한 고 유 t
Δ
진 동 해 석 을 수 행 하 였 다 . 고 유 진 동 수 해 석 결 과 에 따 라 제 1차 고 유 진 동 수 는 24 Hz이 며 , 여 기 서 고 유 진 동 주 기 는 t = 1 / 1 3 5 .5 6 = 0 .0 0 7 s e c이 다 .2 시 간 증 분 값 은 해 의 정 밀 도 와 해 석 시 간 에 직 접 적 인 영 향 을 미 치 므 로 충 분 한 해 석 을 통 하 여 수 렴 성 및 결 과 의 정 확 성 을 검 토 한 후 결 정 해 야 한 다 . 고 유 진 동 수 해 석 결 과 에 따 라 Δ t=0.002로 하 여 해 석 을 수 행 하 였 다 .
해 석 결 과 4.
동 적 해 석 결 과 4.1
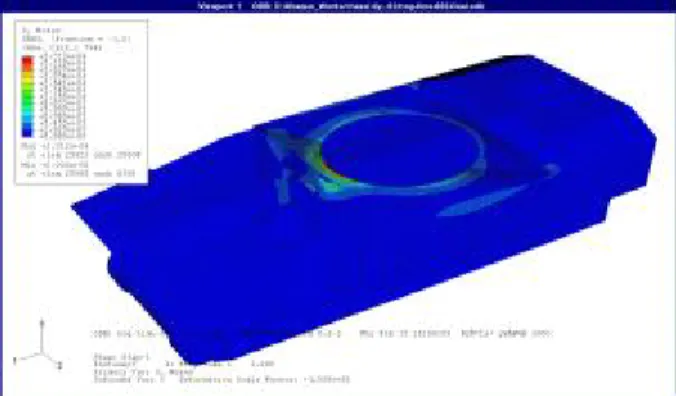
차 체 의 자 중 (Gravity Load)효 과 에 의 한 해 석 결 과 를 Fig. 3에 나 타 내 었 다 . 최 대 응 력 (Maximum
은 레 이 스 링 부 위 에 서 발 생 하 였 으 며 그 Stress)
크 기 는 23.12 MPa이 다 . 하 지 만 이 부 위 는 경 계 조
건 이 적 용 된 곳 으 로 이 부 위 의 응 력 은 다 소 크 게 평 가 된 것 으 로 판 단 된 다 . 따 라 서 경 계 조 건 이 적 용 된 차 체 상 판 의 값 은 배 제 하 고 관 심 부 위 인 로 드 휠 주 변 및 차 체 부 위 의 응 력 값 을 Table 3에 나 타 내 었 다 .
은 초 에 서 최 대 하 중 이 작 용 했 으 나 해 Step 1 1.2
석 결 과 1.206초 에 서 최 대 응 력 이 발 생 하 였 고 에 서 는 초 에 하 중 이 작 용 했 으 나 초
Step 2 1.4 1.41
에 서 최 대 응 력 이 발 생 하 였 다 . 이 와 같 이 Step 에 서 마 찬 가 지 로 최 대 하 중 작 용 시 점 보 다 3,4,5,6
조 금 늦 은 시 점 에 서 최 대 응 력 이 발 생 하 였 다 .
Fig. 3 Von Mises Contour under Gravity Load Table 3 The Results of Dynamic Analysis
1.200 44.31 5.27 1.206 59.26 6.62 1.400 40.56 1.97 1.410 72.01 8.38 1.600 39.02 3.24 1.632 68.57 8.701 1.800 36.40 2.55 1.834 51.97 6.56 2.000 37.10 2.58 2.002 37.23 2.04
2.2 39.78 4.25
2.202 39.95 4.28
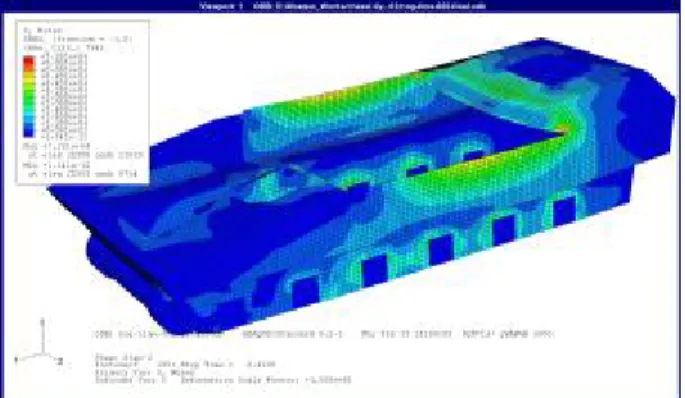
인 초 에 서 의 응 력 해 석 결 과 를
Step 1 1.2 Fig. 4
에 나 타 내 었 다 . 경 계 조 건 이 적 용 된 차 체 상 판 을 제 외 하 고 구 조 물 에 발 생 한 최 대 응 력 (Maximum
은 로 나 타 났 으 며 발 생 위 치 는
Stress) 44.31 MPa
차 체 상 판 에 연 결 되 는 부 위 이 다 . Step 1은 로 드 휠 번 에 의 하 중 이 가 해 지 고 나 머 지 로 드 휠 에
1 100%
는 50%의 하 중 이 가 해 진 경 우 로 관 심 부 위 인 각
로 드 휠 주 위 의 응 력 값 은 약 25 ~ 35 MPa로 나 타 난 다 .
차 체 구 조 물 해 석 에 서 정 적 해 석 의 기 준 이 되 는 허 용 응 력 은 기 본 적 으 로 재 료 의 항 복 응 력 이 며 그 값 은 372 MPa이 다 . 항 복 응 력 을 기 준 으 로 구 조 물 에 발 생 한 응 력 값 은 항 복 응 력 이 하 의 값 을 나 타 내 며 따 라 서 안 전 한 것 으 로 판 단 된 다 . 하 지 만 실 제 동 하 중 하 에 있 는 구 조 물 의 경 우 해 석 의 기 준 이 되 는 허 용 응 력 은 재 료 의 내 구 한 도 , 피 로 강 도 를 산 출 해 내 는 것 이 필 요 하 다 .3 참 고 문 헌 에 의 거 하 여 계 산 된 수 정 피 로 강 도 는 50.3 MPa 이 다 . 관 심 부 위 에 서 발 생 한 응 력 값 은 수 정 된 피 로 강 도 에 비 하 여 적 은 값 을 나 타 내 며 이 에 따 라 관 심 부 위 는 궤 도 차 량 의 운 행 시 내 구 수 명 을 만 족 하 는 것 으 로 판 단 된 다 . 1.2 초 에 서 나 타 나 는 최 대 변 위 는 에 나 타 내 었 으 며 (Maximum Displacement) Fig. 5
그 값 은 5.27 mm로 차 체 의 후 방 에 서 전 반 적 으 로 나 타 난 다 . 관 심 부 위 에 서 발 생 한 변 위 는 로 드 휠 1 번 에 약 3.5 mm 정 도 의 값 이 나 타 나 며 뒤 쪽 으 로 갈 수 록 그 값 이 크 게 나 타 난 다 .
Fig. 4 Von Mises Contour at 1.20 sec
Fig. 5 Displacement Contour at 1.20 sec
과 은 초 에 서 의 응 력 결 과 와
Fig. 6 Fig. 7 1.410
변 위 결 과 그 림 이 다 . Fig. 6에 서 최 대 응 력 은 차 체 상 판 과 연 결 되 는 부 위 에 서 발 생 하 며 그 크 기 는 이 다 관 심 부 위 인 로 드 휠 부 위 에 서 나 72.01 MPa .
타 나 는 응 력 은 약 36 MPa ~ 42 MPa로 나 타 난 다 . 최 대 응 력 이 발 생 한 부 위 는 경 계 조 건 이 적 용 된 부 위 와 연 결 되 는 부 분 으 로 다 소 과 장 되 게 표 현 되 었 다 고 간 주 하 면 관 심 부 위 에 발 생 한 응 력 값 은 수 정 피 로 강 도 인 50.3 MPa 보 다 작 은 값 을 나 타 낸 다 . 이 경 우 에 도 관 심 부 위 는 차 량 의 운 행 시 내 구 수 명 을 만 족 하 는 것 으 로 판 단 된 다 . Fig. 7에 나 타 난 것 과 같 이 1.410 초 에 서 최 대 변 위 는 8.38
로 차 량 의 후 방 에 전 반 적 으 로 나 타 난 다
mm .
Fig. 6 Von Mises Contour at 1.410 sec
Fig. 7 Displacement Contour at 1.410 sec 변 위 거 동 해 석 결 과
4.2
과 는 로 드 휠 번 의 변 위 거 동 을 나
Fig. 8 Fig. 9 1
타 낸 것 이 다 . 로 드 휠 1번 의 절 점 1398은 차 체 를 전 방 에 서 봤 을 때 좌 측 의 절 점 이 고 절 점 1402는 우 측 의 절 점 이 다 . 절 점 1398에 서 는 두 번 째 Step 에 서 가 장 큰 변 위 값 을 나 타 내 며 이 때 의 값 은
이 다 각 에 서 하 중 이 부 과 될 때 큰 6.28 mm . Step
변 위 값 을 나 타 내 며 하 중 입 력 이 완 료 된 시 점 에 서 는 약 1mm 이 내 의 거 동 을 보 인 다 . 하 중 입 력 이
완 료 된 시 점 에 서 변 위 가 점 점 감 소 되 어 미 세 한 진 동 을 한 다 . 하 중 입 력 이 완 료 된 시 점 에 서 약 초 이 후 에 는 변 위 값 이 약 이 내 로 무 시
0.5 0.5mm
할 수 있 을 정 도 의 미 동 이 발 생 한 다 .
절 점 1402는 절 점 1398의 경 우 와 비 슷 한 값 을 나 타 내 나 최 대 변 위 가 Stpe 2에 서 중 력 방 향 (U3)으 로 5.79 mm의 값 을 나 타 낸 다 . 하 중 입 력 이 완 료 된 시 점 에 서 약 0.5초 후 에 는 변 위 가 0.5mm 이 내 의 값 을 나 타 내 며 점 점 진 폭 이 감 소 하 는 경 향 을 나 타 낸 다 . 로 드 휠 의 변 위 거 동 곡 선 의 경 향 으 로 보 아 주 행 하 중 이 제 거 되 고 약 3초 후 에 는 주 행 하 중 으 로 인 한 거 동 을 멈 추 고 처 음 의 상 태 로 복 원 되 는 것 으 로 예 측 된 다 . 절 점 1398와 절 점 1402의 결 과 에 서 볼 수 있 는 것 처 럼 차 체 의 전 후 방 향 및 차 체 의 측 면 방 향 에 서 나 타 나 는 변
(U1) (U2)
위 값 은 0.5mm 이 내 의 결 과 를 보 이 며 이 값 은 무 시 할 수 있 을 정 도 이 다 . 주 행 시 차 체 에 작 용 하 는 주 거 동 방 향 은 중 력 방 향 (U3)인 것 을 알 수 있 다 .
Fig. 8 Displacement Response at Node 1398
Fig. 9 Displacement Response at Node 1402
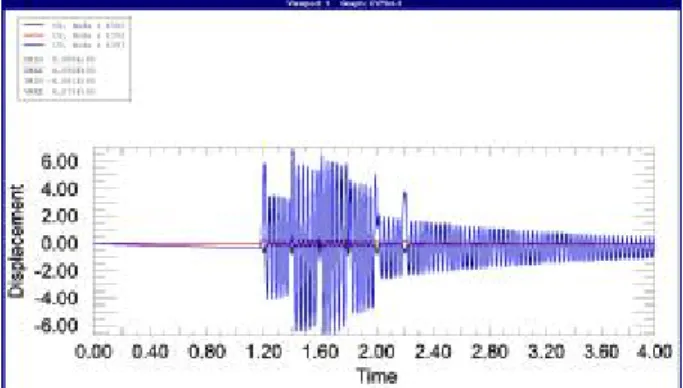
과 은 로 드 휠 번 의 변 위 거 동 을
Fig. 10 Fig. 11 6
나 타 낸 것 이 며 해 석 결 과 다 른 로 드 휠 에 서 발 생 한
최 대 변 위 보 다 큰 값 을 나 타 낸 다 . 절 점 1393은 차 체 를 전 방 에 서 봤 을 때 좌 측 의 절 점 이 고 절 점 은 우 측 의 절 점 이 다 절 점 에 서 나 타 난
1391 . 1393
변 위 는 Step 2에 서 중 력 방 향 (U3)으 로 가 장 큰 값 을 나 타 내 며 이 때 의 값 은 6.874 mm이 다 . 절 점 에 서 는 절 점 와 거 의 유 사 한 거 동 을 보
1391 1394
이 며 주 행 시 나 타 난 최 대 변 위 는 6.75 mm이 다 . 주 행 시 차 체 의 전 후 방 향 (U1)과 차 체 의 측 면 방 향 (U2)으 로 발 생 한 변 위 는 0.5 mm보 다 작 은 값 으 로 미 세 한 거 동 이 일 어 나 는 것 을 알 수 있 다 .
과 에 서 나 타 낸 변 위 거 동 곡 선 의
Fig. 10 Fig. 11
경 향 으 로 보 아 구 조 물 은 주 행 하 중 이 제 거 되 고 약 초 후 에 는 주 행 하 중 으 로 인 한 거 동 을 멈 추 고 처 3
음 의 상 태 로 복 원 되 는 것 으 로 예 측 된 다 .
Fig. 10 Displacement Response at Node 1393
Fig. 11 Displacement Response at Node 1391
결 론 5.
. 1.
. 2.
(Time Increment) 1 0.002 .
3. Step 2
72.01 MPa
. 4.
30 MPa ~ 40 MPa 50.3 MPa
.
5. 6.847 mm
3
. 6.
.
후 기
(ReCAPT) (BK21)
.
참 고 문 헌
(1) Hibbit, HD, and Karlsson, B.Ii, ABAQUS /Standard User Manual, Section 6.3.2 "Dynamic analysis using direct integration", HKS Inc.
김 종 범 황 영 진 이 석 순 최 창 곤 손 재 홍
(2) , , , , , 2002.
동 하 중 을 고 려 한 궤 도 용 차 량 의 거 동 에 관 11, "
한 연 구 ", 기 계 의 날 선 포 및 2002년 도 기 계 관 련 산 학 연 연 합 심 포 지 엄 강 연 및 논 문 집 A(대 한 기 계 학 회 편 ), pp. 620~625
정 태 형 한 병 기 정 태 진 오 환 섭 이 석 순 이 정
(3) , , , , ,
윤 공 역 , 1999, "기 계 설 계 Machine Design An Integrated Approach", pp. 119 129˜
이 영 신 최 창 전 병 희 오 재 문 궤 도
(4) , , , , 1997. 9, "
차 량 의 구 조 해 석 ", 전 산 구 조 공 학 제 10권 제 3호 임 재 규 조 규 종 김 영 석 김 영 수 공 저
(5) , , , , 1996,
컴 퓨 터 원 용 고 체 역 학
" "