강재 분기기의 진동을 고려한 자기부상열차 부상안정성 연구
Study on the Levitation Stability of Maglev Vehicle considering the Vibration of Steel Switch Track
한종부·박진우·한형석·이종민*·김성수
Jong-Boo Han·Jinwoo Park·Hyung-Suk Han·Jong-Min Lee·Sung-Soo Kim
1. 서 론
분기기 시스템은 열차의 방향을 전환시키기 위하여 사용되는데, 열차 분야에서 분기기 시스템은 탈선과 직접적으로 연관 되게 때문에 분기기의 설계변수가 매우 신중하게 결정되고 있다[1]. 이러한 사항은 자기부상열차 분야에서도 동일하게 적 용된다. 하지만 일반적인 바퀴식 열차와는 다르게 국내의 상전도 흡인식 자기부상열차는 Fig. 1에서 보여주는 것과 같이 대 차가 레일을 감싸고 있는 구조로 되어있기 때문에 Fig. 2 같이 거더 전체가 움직여 곡선을 형성 한다. 또한 분기기의 최대 동작시간에 대한 설계조건을 만족시키기 위하여 무게를 낮추기 위한 방안으로 강재 구조물로 설계되었다[2].
이러한 강재 구조물은 일반 콘크리트 거더에 비하여 낮은 질량비로 인해 진동에 취약한 조건이 된다.
앞서 언급한 국내에서 개발된 U-타입의 상전도 흡인식 자기부상열차는 기본적으로 반발식에 비하여 불안정한 상태이기 때문에[3], 구조물과 상호작용으로 공진이 발생할 경우 부상제어가 실패할 가능성이 있다. 따라서 자기부상열차와 분기기 시 스템 사이의 진동을 해석적 또는 실험적으로 명확히 규명해야만 한다. 앞선 연구를 살펴보면 자기부상열차의 분기기 시스 템 자체의 모드분석이 수행되었고, 자기부상열차의 무게만 고려한 저자유도 시스템의 고유치 해석이 수행되었지만 자기부 상열차와 부상전자석 제어기, 분기기 구조물 등이 모두 고려된 통합 해석 모델을 소개된 적 없다[1,2].
Abstract Generally, in the train area, switch tracks have required high reliability because this system is directly associ- ated with derailment. Especially, switch tracks of Maglev vehicles must be moved in terms of the whole geometric charac- teristics, in which the bogies are encased in the switch track. For this reason, switch track was constructed with steel lighter than concrete girders. But, the steel switch track was weak because of structural vibration as well as structural deformation.
Therefore, it is important to predict the levitation stability when a vehicle passes over flexible switch track. The aims of this paper are to develop a coupled dynamic model to describe the relationship between a Maglev vehicle and switch track and to predict the levitation stability. In order to develop the coupled dynamic model, a three dimensional vehicle model was developed based on multibody dynamics; a switch model was made using the modal superposition method. And, the devel- oped model was verified using comparison measured data.
Keywords : Maglev vehicle, Levitation stability, Dynamic interaction, Flexible switch track
초 록 일반적으로 열차분야에서 분기기 시스템은 안전성과 직접적으로 연관되기 때문에 높은 신뢰성이 요구 된다. 특히 자기부상열차의 분기기 시스템은 대차가 궤도를 감싸는 구조적 특징으로, 고가궤도 전체가 움직여야 한다. 이러한 이유로 자기부상열차의 분기기는 강 재질로 설계되었다. 강 거더의 분기기는 콘크리트 거더에 비 하여 진동측면뿐만 아니라 거더의 처짐에도 취약하다. 그러므로 자기부상열차가 유연한 분기기 위를 통과 할 때, 부상안정성 예측이 매우 중요하다. 본 논문의 목표는 자기부상열차와 분기기 거더의 연성된 동역학 해석모델을 개발하고, 공진예측 및 차량의 부상안정성 예측에 있다. 이를 위해서 차량의 3차원 다물체 동역학 모델을 개발 하였고, 분기기 거더와 모달중첩법을 이용한 연성모델링을 수행하였다. 개발된 해석모델은 실측 실험과 비교를 통해서 해석모델의 타당성을 검증하였다.
주요어 : 자기부상열차, 부상안정성, 동적상호작용, 유연분기기선로
*Corresponding author. Tel.: +82-10-4468-7199, E-mail : [email protected].
©2015 The Korean Society for Railway. All rights reserved.
http://dx.doi.org/10.7782/JKSR.2015.18.3.175
따라서 본 논문의 목적은 자기부상열차와 분기기 시스템 사이의 진동을 분석하기 위한 동적 상호 작용 통합모델을 개발 하는데 있다. 개발된 자기부상열차와 분기기 시스템 상호 모델의 검증을 위하여 실제 차량의 주행의 실측 데이터와 비교 를 수행하였다. 또한 개발된 모델을 이용하여 공진이 발생할 때 자기부상열차의 안정성 등을 해석적 기법으로 분석 하였다.
2. 모델링 2.1 부상전자석 및 제어기 모델링
Fig. 3은 자기부상열차의 부상전자석과 가이드 레일 사이의 전체 관계를 보여주고 있다. 전자석에 전류를 흘려주게 되면 자속으로 인한 자속밀도(flux density, B)가 형성되고, 공극과 전류에 의한 전자력 (attraction force)이 발생한다. 이 관계는 식(1)과 같다[4]. 또한 전자석의 전체 회로의 저항에 의한 전압의 방정식은 식(2)와 같다.
(1)
여기서, N: 코일 턴 수, µ0: 공기 투자율, A: 코어 단면적, i(t): 코일에 흐르는 전류, z(t): 자석과 도체 사이 거리(2)
(2) 여기서, 인덕턴스(L)는 전류(i)에 반비례하고 자속(φ)에 비례하며, 자속은 공극이 저항을 의미하여 식(3)같이 표현이 가능하다.
(3) F i z( ), B2A
µ0
--- µ0N2A ---4 i t( )
z t( ) ---
⎝ ⎠
⎛ ⎞2
= =
v t( ) Ri t( ) d
dt---- L z i( ( ) i t, ⋅ ( )) +
=
L z i( ), N ----iφ N
i t( ) ---Ni t( )
RT --- N2
RT ---
= = =
Fig. 1. Mechanism between Maglev vehicle and guide way. Fig. 2. Switch system for Maglev vehicle.
Fig. 3. Electromagnet - guiderail configuration.
여기서 RT는 릴럭턴스로 RT=d/µ0A으로 정의되는데, d는 양쪽 코어와 가이드레일 사이의 공극으로 d=2z(t)와 같이 표현할 수 있다. 그에 따라서 식(3)은 식(4)와 같이 정리 된다[4].
(4) 따라서 전압방정식(2)는 식(5)와 같이 정리될 수 있다.
(5)
여기서,
본 논문에서는 비성형성을 갖는 전자석의 식(1), (5)를 자기부상열차의 부상 공칭점(equilibrium point, i0, z0)에 대하여 Tylor 급수를 이용한 선형 모델로 식(6), (7)과 같이 정의 하였다[5].
(6)
(7) 여기서,
자기부상 제어 방식은 식(8)과 같은 전압의 변화량을 제어 하는 방식이다[5,6]. 여기서 는 관측기(observer)를 통해 계 산된 공극을 의미하고, 는 전자석의 위치를 의미하며, k1~k5는 제어 게인을 의미한다.
(8) 위의 관측 상태 변수는 식(9)와 (10)과 같은 다섯 개의 상태 변수를 사용한 상태궤환 제어기를 사용하고 있다.
(9)
(10) L z i( ), µ0N2A
2z t( ) ---
=
v t( ) Ri t( ) µ0N2A ---2 d
dt---- i t( ) z t( ) ---
⎝ ⎠
⎛ ⎞
+ Ri t( ) K 1 z t( ) ---
⎝ ⎠
⎛ ⎞i t() K i t() z t( )2 ---
⎝ ⎠
⎛ ⎞z· t() –
+
= =
K µ0N2A ---2
=
F i(0,z0)=–Ki∆i K+ z∆z v t( ) R i∆ L0 i·
Ki∆z·
∆ – +
=
K µ0N2A
--- L2 , 0 K1 z03 ---- K, i i0
z02
---- K, z Ki02 z03 ----
= = = =
∆zˆ
∆gˆ
v t( )
∆ =k1∆g·· t( ) k+ 2∆g· t( ) k+ 3∆gˆ t( ) k+ 4∆z· t( ) k+ 5∆zˆ t( )
x·o
1( )t x·o
2( )t x·o
3( )t x·o
4( )t x·o
5( )t
0 1 T3 --- 0 1
T3 --- – 0
1 T1 --- – V1
T1 --- – 0 V1
T1 --- 0
0 1 T2 --- V2
T2 --- – 0 V2
T2 ---
0 0 0 V3 T4 --- 1
T4 ---
0 0 0 1 T5 --- 0
xo
1( )t xo
2( )t xo
3( )t xo
4( )t xo
5( )t 0 0 1 T1 --- 0
0 0 0 1 T4 --- 0 0 +
=
∆z··1( )t
∆z·1( )t
∆zˆ1( )t
∆c· t()
∆cˆ t() 1
– –V10 V10 0 1 0 0 0 0 0 1 0 0 0 0 0 1 0 0 0 0 0 1
xo
1( )t xo
2( )t xo
3( )t xo
4( )t xo
5( )t 1 0 0 0 0 0 0 0 0 0
∆z··
∆c +
=
여기서 T1~T5는 각각 차단주파수(cut-off frequency)를 결정하는 파라 미터이고, V1~V3뎀핑을 의미한다. 위 변수는 차량과 대차 시스템의 기계적 물성치가 포함된 부상제어 시스템에서 중요한 변수이다[5,6].
2.2 차량모델링
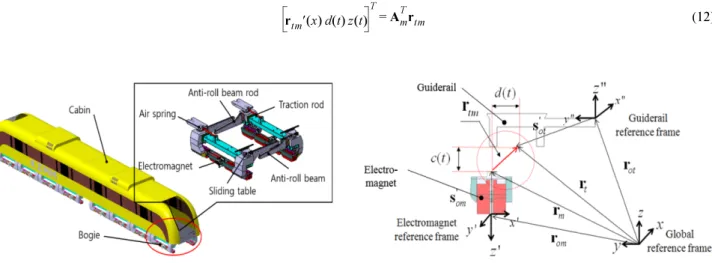
자기부상열차의 차량 및 대차 시스템은 Virtual Lab. Motion 프로그램을 이용하여 3차원 다물체 동역학 기반으로 모델링 하였다. 모델링 된 자기부상열차는 Fig. 4와 같이 2량, 8대차로 개발되었다[7]. 자기부상열차의 대차(bogie) 시스템은 Fig. 4 와 같이 안티롤바 (anti-roll beam), 공기스프링 (air spring), 전자석 (electromagnet), 견인바 (traction rod), 슬라이딩 테이블 (sliding table) 등으로 구성되어있으며[7], 각각의 연결관계는 Table 1과 같다. 여기서 i와 j body는 서로 연결관계가 있는 물 체를 의미한다. 위 모델은 총 200개의 바디로 구성되어 있으며, Table 1의 기구적 구속조건(kinematic constraint)을 고려하 여 총 470 자유도를 갖는다.
개발된 자기부사열차 다물체 동역학 모델에 전자석 및 부상 제어기 모델을 통합시키기 위하여, 전자석 운동방정식(6), (7) 을 user subroutine을 통해 구현하였다. 먼저 식(6), (7)에서 부상공극(z), 부상공극 속도( ) 그리고 전류의 미분치( )의 계산 이 필요하다. 이를 위하여 Fig. 5와 같은 기구적 벡터를 정의하였다[7].
정의된 벡터를 이용하여 식(11)과 같은 방법으로 부상공극을 계산할 수 있다. 여기서, rot는 전체 좌표에서 가이드레일까 지의 거리벡터를 의미하고, At는 전체좌표에서 본 가이드레일 좌표의 좌표변환행렬을 의미하며, s'ot는 가이드레일 좌표와 공 극계산 포인트까지의 상수 벡터를 의미한다. 같은 방법으로 rom는 전체좌표에서 전자석까지의 거리 벡터를 의미하고, Am전 체좌표에서 본 전자석 좌표의 좌표변환행렬을 의미하며, s'om는 전자석에서 공극포인트까지의 상수 벡터를 의미한다.
(11) 이때 계산된 rtm는 전체좌표에서 본 값이므로 부상제어가 활용하기 위하여 식(12)와 같이 전자석 좌표에서 본 local 값으 로 변환할 수 있다. 이때 z(t), d(t)는 부상공극, 횡공극을 의미한다.
(12)
1~ 3
V V
z· i·
rtm=rt–rm=rot+Atsot′ –rom–Amsom′
rtm′ x( ) d t( ) z t()T=AmTrtm
Fig. 4. Maglev vehicle model based on multibody dynamics. Fig. 5. Definition of vectors with respect to electromagnet and track
Table 1. Joint and force specifications.
Elements Items type Body
i j
Joint
Electro-magnet Bracket joint Electro-magnet Bogie frame
Traction rod Revolute joint Traction rod Sliding table
Sliding table Translational joint Sliding table Air spring
Anti-roll beam rod Spherical joint Anti-roll beam rod Anti-roll beam
Anti-roll beam Revolute joint Anti-roll beam Bogie frame
Force Anti-roll beam Bushing Anti-roll beam Anti-roll beam rod
Air spring Bushing Cabin Bogie frame
같은 방법으로 시간에 대한 미분을 통해 식(13)과 같이 공극속도 값을 계산 할 수 있다.
(13)
2.3 유연분기기 모델링
모달중첩법은 강제 진동을 표현하는 2차 지배방정식에서 모달좌표계(modal coordinate)를 이용하여 식(14)과 같이 변환이 가능하다[8].
(14) 여기서, Φ: Mode shape matrix, α: Modal coordinate vector, z = Φα: Global z (vertical) position
모드의 직교성을 이용하기 위하여 식(14)의 양변에 ΦT를 곱해주어 정리하면 다음과 같다.
(15) 여기서, , , ,
최종적으로 식(15)의 모달 좌표계의 운동방정식은 앞서 설명한 부상제어 식(9), (10)과 함께 해석하기 위하여 같은 1차 ODE 형태로 식(16)과 같이 표현 하였다.
(16)
여기서,
여기서 출력값 w는 의 형태로 모드벡터의 위치, 속도, 가속도가 출력되고, 이 값은 식(14)의 z=Φα를 적 용하여 구조물의 수직 방향 변형(bending deflection), 속도, 가속도를 계산 할 수 있다. 이 과정을 통해 계산된 구조물의 변 형값은 앞 절의 차량모델링에서 식(11)와 (13)의 가이드레일 기준 좌표계 의 위치 벡터(rt)와 속도 벡터( )에 구조물의 외 란으로 더해져 작용되게 된다. 또한 입력( )는 제어된 전자석 힘을 의미하는데, 본 논문에서는 전자석의 힘을 21포인트로 분산시켜 식(17)과 같은 분산하중과 같이 고려하였다[8].
(17) r·tm r·t–r·m r·ot A·
tsot–r·om A·
msom′ –
+ r·ot+Atω˜t′sot′ –r·om–Amω˜m′som′
= = =
MΦa·· CΦα· KΦα+ + =F
Mα·· Cα· Kα+ + =F
M Φ= TMΦ C Φ= TCΦ K Φ= TKΦ F=ΦTF
α· Aα BF= + w=Cα VF+
A 0 1
M ( )–1K
– –( )M–1C B
, 0
M–1 C ,
1 0
0 1
M ( )–1K
– –( )M–1C D ,
0 0 M–1
= = = =
w=[α α· α··]T
r·t F
F ΦTF Φ x( ) Fi( i⁄21)
i 1=
∑
21= =
Fig. 6. Switch track.
위에서 설명한 해석방법을 이용하기 위하여 분기기의 고유진동수를 이용한 모달 중첩법을 이용하였다. 해석 모델로 사용 된 분기기는 Fig. 6과 같이 한국기계연구원에 설치된 2방향 분기기를 대상으로 하였다. 위 분기기는 총 3개의 구조물로 이 루어져 있으며, 구조물의 길이는 각각 단경간 거더 4.3m 2개, 장경간 거더 18m 1개로 구성되어 있다[1,2].
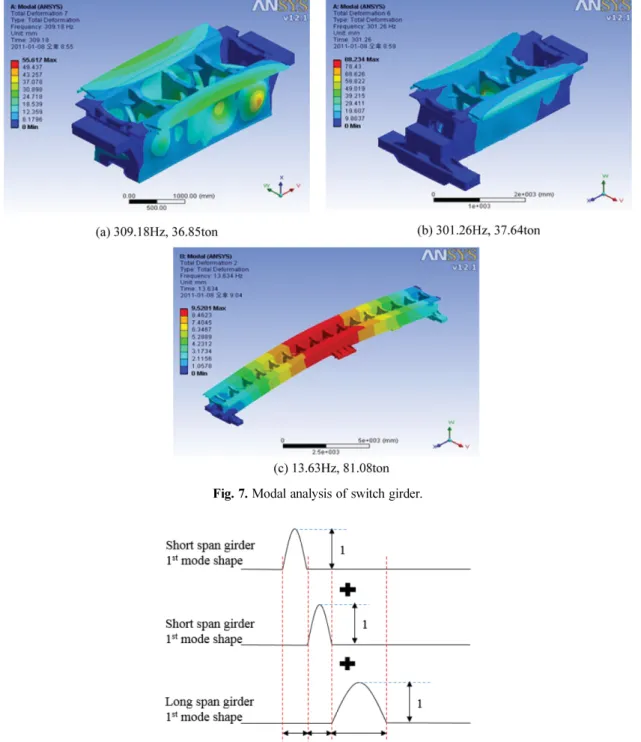
분기기의 고유진동수를 분석하기 위하여 Fig. 7과 같이 ANSYS를 이용하여 모드 해석을 수행하였다. 해석결과 1차 굽힘 모드가 단경간 거더는 (a)와 (b)처럼 약 300Hz의 고주파영역에서 검출되었고, 장경간 거더는 (c)와 같이 약 13.63Hz에서 검 출되었다. 본 논문에서는 구조물의 굽힘 모드 중에서도 진동밴드가 가장 낮은 1차 모드만 적용하였다.
위에서 해석된 분기기 단/장경간 거더의 고유진동수와 모달질량은 식(15)에 적용하였고, 비례 댐핑을 사용하였다. 분기기 의 단경간, 장경간 거더는 실제적으로 완전히 분리된 것이 아니기 때문에 앞서 발생한 진동이 다음 거더에 영향을 준다. 따 라서 굽힘 모드형상을 Fig. 8과 같이 크기가 1이고, 각 구조물의 길이를 갖는 1차모드를 중첩시켜 연속되도록 정의 하였다.
Fig. 7. Modal analysis of switch girder.
Fig. 8. Mode superposition of switch girder.
2.4 해석 프로세스
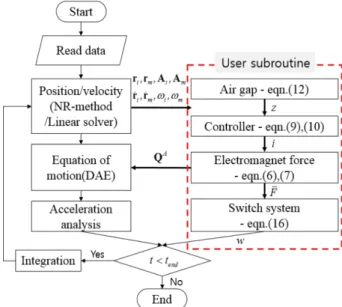
앞서 개발된 각각의 모델은 Fig. 9와 같은 해석과정으로 통합되었다. 먼저 Virtual Lab. Motion [9] 프로그램에서 차량과 대차 그리고 가이드웨이에 대한 위치, 속도, 가속도를 계산하고, user subroutine으로 보내진다. 이 값은 식(12)와 같이 공극 값을 계산하고, 식(6), (7)으로 제어 전자석 힘을 계산하게 된다.
Fig. 9. Analysis process of coupled model.
계산된 전자석 힘은 전체 운동방정식(Differential Algebra Equation, DAE) 안에 외력(QA)으로 적용되어 해석하게 되고, 또 한 분기기 구조물의 운동방정식(16)으로 보내진다. 위 과정으로 전체 자기부상열차의 위치, 속도, 가속도와 분기기 구조물 에 대한 처짐(w), 처짐 속도, 처짐 가속도를 계산하게 된다.
3. 해 석 3.1 모델검증을 위한 실험 및 해석 비교
개발된 자기부상열차와 분기기 시스템의 연성해석모델을 검증하기 위하여 한국기계연구원에 설치된 분기기 시스템을 바 탕으로 차량 주행 시험을 수행하였다. 시험은 자기부상열차가 일정 속도로 주행 중 분기기 단/장경간 거더의 처짐을 측정 하였다. Fig. 10은 차량의 속도가 10km/h일 때, 분기기 단/장경간 거더의 중심부에서 처짐을 측정한 그래프이다. 단경간 거 더의 경우 0.289mm, 0.357mm으로 각각 발생하였고, 장경간 거더는 약 3.71mm의 처짐이 발생하였다.
Fig. 10. Measured deflection of switch girder at 10km/h. Fig. 11. Simulated deflection of switch girder at 10km/h.
Fig. 11은 개발된 연성해석 모델을 이용하여 차량의 속도를 10km/h으로 주행했을 때 분기기의 처짐을 해석하였다. 해석 결과 단경간 거더는 약 0.128mm, 0.137mm의 처짐이 발생하였고, 장경간 거더는 약 3.8mm의 처짐이 발생하였다.
Fig. 12는 분기기 장경간 거더의 중심부 최대 처짐을 각각 실제실험과 해석을 통해 비교한 그래프이다. 이 실험은 차량 의 속도에 대한 비교를 위해서 차량속도를 10km/h 에서 60km/h까지 증가 시키며 분기기 주행을 수행하였다. 실험 및 해 석결과 정략적으로 차이가 거의 없는 것을 확인하였고, 속도에 대한 장경간 거더의 처짐 영향이 매우 미비한 것을 알 수 있다.
결과적으로 실험과 해석의 정량적인 차이는 단경간 거더는 약 0.16mm, 장경간 거더는 약 0.09mm으로 차이가 미비한 것 을 알 수 있다. 여기서 단경간 거더의 고유진동수가 고주파에 해당하여 공진이 발생하기 어렵고, 그 크기 또한 미비하기 때 문에 장경간 거더에 초점을 두어 해석하고자 한다.
따라서 개발된 자기부상열차와 분기기 시스템의 연성해석 모델을 이용하여 차량과 분기기의 장경간 거더 사이의 공진해 석을 하는데 합당한 모델이라고 판단하였다.
3.2 공진해석을 위한 정지부상 시뮬레이션
개발된 모델을 이용한 공진해석을 위하여 Fig. 13과 같이 차량을 분기기 시스템 위에 정지부상 (stand still) 시켜놓고, 장 Fig. 12. Deflection comparison with respect to vehicle speed.
Fig. 13. Simulation conditions with respect to driven simple harmonic motion.
경간 거더의 중심부에 시간에 따라서 주파수가 상승하는 주기를 갖는 강제진동 (forced vibration)을 입력하였다. 이때 입력 한 힘의 크기는 분기기의 처짐 변동에 영향을 주기 때문에, 최대 크기를 부상력의 10%으로 고려하였다.
일반적으로 상전도 흡인식 자기부상열차는 가이드 웨이와의 연성으로 인해 발생할 수 있는 진동이 저속 구간이거나, 혹 은 정지상태에서 발생할 가능성이 크다 [10]. 이러한 현상은 가이드웨이의 길이가 정해져 있을 때, 차량의 주행속도가 상 승하게 될 경우 고주파의 외란으로 바뀌게 되고, 이러한 영향은 거더와 차량의 공진주파수 범위를 벗어나기 때문에 공진 이 발생되기 어렵기 때문이다. 따라서 본 논문의 공진해석은 Fig. 13과 같이 정지상태에 초점을 두어 공진을 분석하였다.
또한 차량의 총 길이는 약 25m이고, 분기기 거더의 총 길이는 25.6m으로 자기부상열차가 분기기 위에 모두 올려져 있는 상황이 발생 할 수 있다. 따라서 본 논문의 공진 해석에서는 차량이 모두 강재 분기기 위에 올려져 진동이 가장 발생하기 쉬운 상황을 고려하였다.
해석 결과는 분기기의 장경간 거더의 처짐을 주파수 분석을 통해 공진발생을 확인하고, 이때의 자기부상열차의 부상공극 을 분석하여 차량의 부상 안정성을 평가해 보았다.
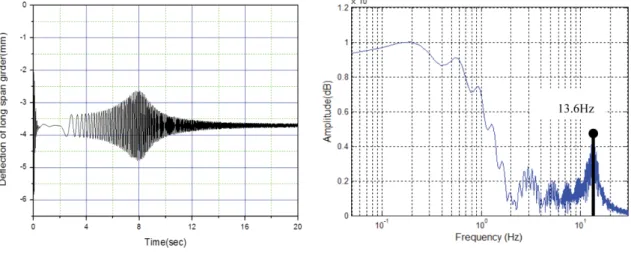
해석결과를 살펴보면, Fig. 14의 (a)와 분기기 장경간 거더의 중앙부 처짐은 자기부상열차의약 무게에 의하여 초기 처짐 이 약 -3.7mm 발생하다가 가진력(Fd)에 의해 공진 시(약 8초)처짐의 크기는 약 -2.7~-4.8mm 정도가 발생했다. 이때 Fig. 14 의 (b)와 같이 분기기의 처짐 결과를 FFT한 결과, 분기기 장경간 거더의 수직방향 1차 모드인 13.6Hz가 확인되었다. 이 결 과는 장경간 거더의 공진이 발생된 것을 의미 한다.
위와 같은 상황에서 기존에 개발된 제어기의 부상성능 검증하기 위하여 Table 2와 같이 실제 차량과 같은 제어 파라미 터를 사용하여 해석을 수행하였다. 여기서 z0는 기준 공극을 의미하고, i0는 차량의 무게를 지탱하기 위한 전자석의 초기 전 류 값을 의미한다. 그리고 식(8)에서 언급한 제어게인 k1~k5는 각각 아래와 같이 정의 되었다.
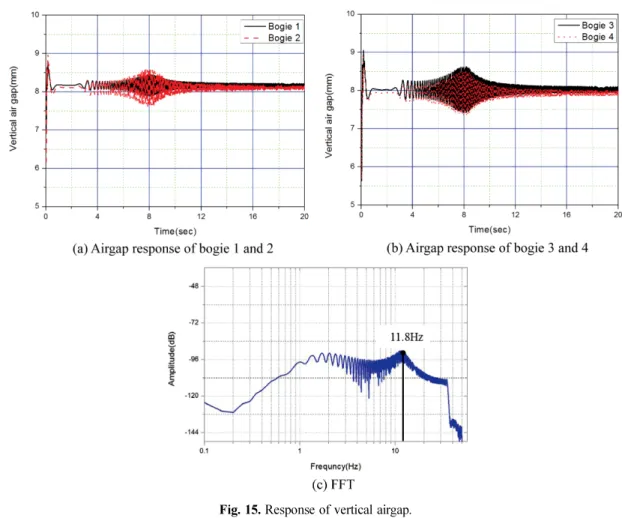
위와 같이 분기기의 장경간 거더가 공진이 발생하여 진동이 발생하였을 때, 자기부상차량의 부상공극을 분석하였다. Fig.
15는 분기기 장경간 거더 위에 해당하는 대차 1에서 대차 4까지의 각각의 부상공극 결과를 나타낸다. 각각의 대차의 부상 공극은 분기기 장경간 거더의 중앙부에 해당되는 대차 3과 대차 4에서 진동 폭이 크게 발생하는 것을 확인하였다. 각각의 대차의 부상공극이 Fig. 15의 (a), (b)와 같이 8mm를 기준으로 안정화 되다가, 공진 발생 시점(약 8초) 에서 진동이 발생 하는 것을 알 수 있다. 이때 진동의 크기는 대차 3에서 최대로 발생하였으며, 약 7.4mm~8.6mm이다. 이러한 결과는 분기 기 구조물의 공진으로 발생한 처짐 진동 (최대 ±1mm )의 영향을 부상 제어기가 약 ±0.6mm으로 진폭의 크기가 다소 줄어 든 것을 보였다. 또한 Fig. 15의 (c)와 같이 부상공극의 FFT 결과를 살펴보면, 11.8Hz으로 나타난 것을 확인할 수 있다. 이 러한 효과는 부상제어기에 의해서 분기기의 장경간 거더 공진 주파수를 회피 한 것을 알 수 있다.
Fig. 14. Deflection of long span switch.
Table 2. Parameters of controller.
Items Values Items Values
z0 8mm k3 7
i0 17.5A k4 40
k1 40 k5 4
k2 7
4. 결 론
자기부상열차의 분기기는 설계조건의 특성에 맞춰 강 구조물로 설계되고 제작되었다. 그에 따라서 콘크리트 거더에 비하 여 진동측면에서 취약한 특성을 갖고 있기 때문에 자기부상열차와 분기기 구조물 사이의 진동(공진) 규명이 필수적이다.
본 논문에서는 해석적인 방법으로 진동규명을 하기 위하여 자기부상열차와 분기기 구조물의 동적 연성해석 모델링을 개 발하였다. 자기부상열차는 다물체동역학 기법을 이용하여 보다 현실에 근접한 해석모델을 개발하였고, 분기기 구조물은 모 드해석을 통해 얻은 고유진동수와 모드질량을 이용한 모달중첩법을 사용하였다. 두 사이의 모델은 움직이는 열차의 부상 제 어된 전자석 힘이 분기기 구조물의 모달중첩법 입력이 되고, 구조물 처짐(출력)이 자기부상열차의 외란으로 입력되는 연성 해석 모델을 개발하였다. 개발된 통합모델을 검증하기 위하여 실제 자기부상열차가 분기기 통과시 분기기 구조물의 중심부 처짐을 측정하여 해석과 비교하여 유사함을 보였다.
본 논문의 결과를 통해서 분기기 구조물의 공진발생 시에 설계된 차량의 부상제어기가 공진주파수를 회피하도록 하는 것 을 확인하였다. 나아가 본문에서 개발된 연성모델을 이용하여 추후 분기기 최적화 설계 시 활용가능 할 것이다.
후 기
본 연구는 국토교통부 철도기술연구사업에 연구비 지원(14RTRP-B070544-02)에 의해 수행 되었습니다.
Referneces
[1] J.M. Lee (2011) A study on running stability for the urban maglev running over the segmented switch system, Ph.D. Thesis, Chungnam National University.
Fig. 15. Response of vertical airgap.
[2] K.J. Kim, H.S. Han, J.M. Lee, S.J. Yang (2010) Running safety of an EMS-type urban maglev vehicle traveling over a segmented switch, Proceedings of 5th Asian Conference on Multibody Dynamics, Kyoto, Japan, pp. 120.
[3] H.S. Han, B.H. Yim, J.K. Lee, Y.C. Hur, et al. (2009) Effects of guideway’s vibration characteristics on the dynamics of a maglev vehicle, Vehicle System Dynamics, 47(3), pp. 309-234.
[4] P.K. Sinha (1987) Electromagnetic suspension dynamics & control, Peter Peregrinus Ltd, London, United Kingdom, pp. 53-72.
[5] J.B. Han, K.J. Kim, H.S. Han, S.S. Kim (2012) Lateral vibration reduction of a maglev train using U-shaped electromagnets, Trans. Korean Soc. Mech. Eng. A, 36(11), pp. 1447-1453.
[6] H.S. Han (2003) A study on the dynamic modeling of a magnetic levitation vehicle, JSME International, 46(4), pp. 1497-1501.
[7] J.B. Han, K.J. Kim, H.S. Han, S.S. Kim (2014) Parametric study of curved guideway for urban maglev vehicle, Trans. Korean Soc. Mech.
Eng. A, 39(3), pp. 329-335.
[8] K.J. Kim, H.S. Han, S.J. Yang (2013) Analysis of dynamic interaction between maglev vehicle and guideway, Trans. Korean Soc. Mech.
Eng. A, 47(12), pp. 1559-1565.
[9] LMS Virtual Lab. Motion User’s Manual, LMS International.
[10] D. Zhou, C. Hansen, J. Li, W. Chang (2010) Review of coupled vibration problems in EMS maglev vehicles, International Journal of Acoustics and Vibration, 15(10), pp. 10-23.
【Received 3 March 2015; Revised 8 April 2015; Accepted 7 May 2015】
Jong-Boo Han : [email protected]
Dept. of Mechatronics Engineering, Chungnam National University, 79, Daehak-ro, Yusung-gu, 305-764, Daejeon, Korea Jinwoo Park : [email protected]
Dept. of System Dynamics Vibration and Shock Research Team, KIMM(Korea Institude Machinery & Materials) 305-343, 171 Jang-Dong, Yuseong-Gu, Daejeon, Korea
Hyung-Suk Han : [email protected]
Dept. of Magnetic Levitation and Linear Drive KIMM(Korea Institude Machinery & Materials) 305-343, 171 Jang-Dong, Yuseong-Gu, Daejeon, Korea
Jong-Min Lee : [email protected]
Dept. of Magnetic Levitation and Linear Drive KIMM(Korea Institude Machinery & Materials) 305-343, 171 Jang-Dong, Yuseong-Gu, Daejeon, Korea
Sung-Soo Kim : [email protected]
Dept. of Mechatronics Engineering, Chungnam National University, 79, Daehak-ro, Yusung-gu, 305-764, Daejeon, Korea