Korean Journal of Remote Sensing, Vol.36, No.5-2, 2020, pp.881~891
https://doi.org/10.7780/kjrs.2020.36.5.2.3 ISSN 1225-6161 ( Print )
ISSN 2287-9307 (Online)
Article
국토관측위성용 정밀영상생성시스템 개발
박형준 1)·손종환 1)·정형섭 2)·권기억3)·이계동4)·김태정 5) 6)†
Development of the Precision Image Processing System for CAS-500
Hyeongjun Park
1)·Jong-Hwan Son
1)·Hyung-Sup Jung
2)· Ki-Eok Kweon
3)·Kye-Dong Lee
4)·Taejung Kim
5) 6)†Abstract: Recently, the Ministry of Land, Infrastructure and Transport and the Ministry of Science and ICT are developing the Land Observation Satellite (CAS-500) to meet increased demand for high- resolution satellite images. Expected image products of CAS-500 includes precision orthoimage, Digital Surface Model (DSM), change detection map, etc. The quality of these products is determined based on the geometric accuracy of satellite images. Therefore, it is important to make precision geometric corrections of CAS-500 images to produce high-quality products. Geometric correction requires the Ground Control Point (GCP), which is usually extracted manually using orthoimages and digital map.
This requires a lot of time to acquire GCPs. Therefore, it is necessary to automatically extract GCPs and reduce the time required for GCP extraction and orthoimage generation.
To this end, the Precision Image Processing (PIP) System was developed for CAS-500 images to minimize user intervention in GCP extraction. This paper explains the products, processing steps and the function modules and Database of the PIP System. The performance of the System in terms of processing speed, is also presented. It is expected that through the developed System, precise orthoimages can be generated from all CAS-500 images over the Korean peninsula promptly. As future studies, we need to extend the System to handle automated orthoimage generation for overseas regions.
Key Words: CAS-500, Geometric Correction, GCP Chip, Orthorectification, Image Matching
요약 : 고해상도 위성영상의 수요 증가로 국토교통부와 과학기술정보통신부에서 국토관측위성을 개발하고 있다. 국토관측위성의 주요 위성영상 산출물로 정밀보정영상, 정밀정사영상, DSM/DTM, 변화탐지 주제도 등Received October 12, 2020; Revised October 22, 2020; Accepted October 26, 2020; Published online October 29, 2020
1)
인하대학교 스마트시티공학전공 석사과정생 (Master Student, Program in Smart City Engineering, Inha University)
2)
서울시립대학교 공간정보공학과 정교수 (Professor, Department of Geoinformatics, University of Seoul)
3)
(주)신한항업 사업본부 부장 (Division Manager, Technical Division, Shin Han Aerial Surveying Co., Ltd)
4)
(주)범아엔지니어링 국토정보시스템연구소 소장 (Director, Geo-Information Research Institute, PANASIA Engineering Co., Ltd)
5)
인하대학교 공간정보공학과 정교수 (Professor, Department of Geoinformatic Engineering, Inha University)
6)
인하대학교 스마트시티공학전공 정교수 (Professor, Program in Smart City Engineering, Inha University)
†Corresponding Author: Taejung Kim ([email protected])
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License
(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in
any medium, provided the original work is properly cited.
1. 서론
국내 고해상도 위성영상의 수요증가로 국토부에서 는 국토관측위성을 개발하고 있다 . 국토관측위성 1호와 2호는 차세대 중형위성(Compact Advanced Satellite 500, CAS-500) 시리즈 중의 하나로 5개의 밴드(Panchromatic, Red, Green, Blue, NIR)와 전정색: 0.5 m, 다중분광영상:
2.0 m의 Ground Sampling Distance(GSD)를 갖는 위성 이다. 국토관측위성은 두 위성이 180도의 위상차로 위성 궤도를 이동하며 지상을 촬영하는 특징을 갖고 있으며 2021년에 발사하는 것을 목표로 하고 있다. 국토관측위 성의 위성영상 산출물로 정밀보정영상 , 정밀정사영상, Digital Surface Model(DSM)/Digital Terrain Model(DTM), 변화탐지 주제도 , 객체 추출 주제도 등을 생성한다. 이 러한 산출물을 활용하여 국토 모니터링 , 3차원 공간정 보 구축 등 여러 분야에 활용될 것으로 기대하고 있다 .
위성영상 산출물의 품질은 위성영상의 기하정확도 에 기반하여 결정된다 . 따라서, 고품질의 위성영상 산출 물을 생성하기 위해 정밀기하수립 및 정사보정으로 위 성영상이 초기에 갖고 있는 위치오차와 위성영상 촬영 과정에서 발생하는 기복변위를 제거하여 위성영상의 기하정확도를 높이는 것이 중요하다. 대표적인 정밀기 하수립 방법으로 유리함수모델(Rational Function Model, RFM)과 지상기준점(Ground Control Point, GCP)를 이 용한 번들조정 (Bundle Adjustment) 방법이 있다(Grodecki and Dial, 2003). 이 방법은 RFM 보정 모델을 설정한 후 GCP를 이용하여 RFM 보정 계수를 산출하여 센서모델 을 보정하게 된다 . 정밀기하수립에 사용하는 GCP는 대
체로 기 제작된 정사영상이나 수치지도를 사용하여 육 안으로 추출한다. 그러나, 이러한 방식으로 GCP를 추 출하는 것은 많은 시간을 요구하여 다량의 위성영상을 기하보정 하는 것에 적절하지 않다 . 이를 개선하기 위 한 방법으로 GCP 칩을 이용한 자동 GCP 추출 방법에 대한 연구가 수행되었다 (Yoon, 2019; Kim and Im, 2003;
Wong and Clausi, 2007; Shin et al., 2019). 또한, 위성영상 의 기하보정이 탑재된 일부 국내외 SW 들에도 영상정 합을 통한 자동 GCP추출 기능을 보유하고 있다. 그러 나 기존 기술 및 SW들은 자동 GCP 추출에 필수적으로 요구되는 고밀도 GCP DB 구축과 처리대상 위성영상 에 특화된 영상정합 기술의 부재로 많은 양의 위성영상 의 정밀정사보정에 적용하는 데에 한계가 있다 . 이러한 이유로 이제까지 국내에서 발사된 저궤도 지구관측위 성의 정밀정사영상 제작이 원활히 이루어지지 못하는 한계점이 있다.
따라서, 본 연구는 기존 정밀영상 제작방식의 단점을 보완하여 , 국토위성센터로 입력된 위성영상으로부터 정밀영상을 생성하는 단계까지 사용자의 개입을 최소 화하여 동작하는 국토관측위성용 정밀영상생성시스템 을 개발하였다 . 개발된 시스템은 GCP 생성, 정밀기하 수립 및 정밀정사보정 기능을 자동화된 방식으로 수행 할 수 있다 . 이를 위해서 Pan-Sharpening 알고리즘을 적 용한 영상융합 모듈과 한반도 전역에 고르게 분포된 정 밀 기준점 DB 및 DEM DB를 구축하여 시스템에 탑재 하였다 .
본 논문은 2장에서 정밀영상생성시스템의 산출물을 설명하며 , 3장에서는 시스템 처리 절차에 대해서 설명
이 계획되어 있다. 이러한 위성영상 산출물의 품질은 위성영상의 기하정확도에 기반하여 결정된다. 따라서, 고품질의 위성영상 산출물을 생성하기 위해 위성영상의 기하학적인 왜곡을 보정하는 것이 중요하다. 또한, 정밀기하수립을 위한GCP를 취득하는 방법은 대체로 정사영상, 수치지도 등을 이용하여 수동으로 취득한다.이 방식은GCP를 취득하는데 많은 시간이 요구된다. 따라서, 자동으로 GCP를 추출하여 GCP 취득 시간과 정 밀정사영상 생성 시간을 줄이는 것이 필요하다. 이를 위해, 국토관측위성으로 촬영한 위성영상의 정밀한 기 하보정과GCP 추출 시 사용자의 개입을 최소화할 수 있는 정밀영상생성시스템을 개발하였다. 본 논문은 국 토관측위성용으로 개발된 정밀영상생성시스템의 산출물, 처리 과정 및 시스템 구성에 대해서 설명하고 개발 된 시스템의 처리시간 성능에 대해서 기술한다. 본 시스템을 통해 개발된 기술과 데이터베이스를 활용하여 한 반도를 촬영한 모든 국토관측위성영상으로부터 신속하게 정밀정사영상을 생성할 수 있을 것으로 기대된다. 향후, GCP DB와 DEM DB의 데이터를 해외지역으로 확장하여 해외지역의 정밀영상을 생성할 수 있는 후속 연구가 필요하다.
한다 . 4장에서는 시스템을 구성하는 모듈과 데이터베 이스에 대해 설명하고 시스템의 처리 속도에 대해서 기 술한다 .
2. 정밀영상생시스템 산출물
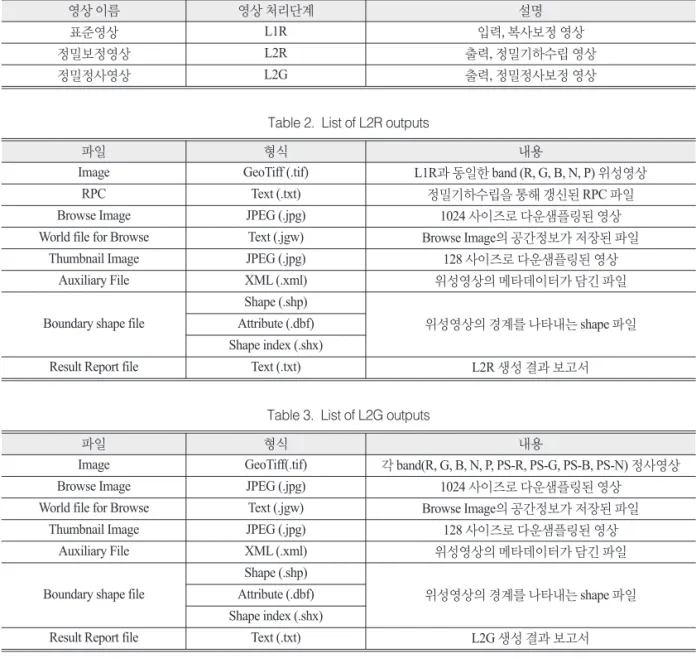
국토관측위성용 정밀영상생성시스템은 기하보정이 완료된 영상을 생성하기 위해, 표준영상(L1R)을 입력 받 아 정밀보정영상 (L2R) 및 정밀정사영상(L2G)을 생성한 다 (Shin and Kim, 2019). Table 1에 정밀영상생성시스템 의 입력 및 출력영상의 명칭 및 처리단계를 정리하였다.
표준영상은 위성의 물리적 센서모델로부터 추정한 Rational Polynomial Coefficient(RPC)를 제공하는 복사보 정이 완료된 영상이다(Lee et al., 2013). 정밀보정영상은 표준영상에서 제공하는 초기 RPC의 위치오차를 정밀 기하수립을 통해 제거한 영상으로 표준영상과 동일한 격자구조를 갖는 위성영상과 보정된 RPC를 제공한다.
본 시스템으로 제작한 정밀보정영상의 산출물은 Table 2 와 같다 .
정밀정사영상은 위성영상 촬영 시 발생한 기복변위 를 제거하기 위해 DEM을 이용하여 정사보정을 수행한 영상이다. 정밀정사영상 산출물은 Table 3과 같으며, 저 해상도 다중분광영상(Red, Green, Blue, NIR), 전정색영
Table 1. Type of CAS-500 imagery
영상 이름 영상 처리단계 설명
표준영상 L1R 입력, 복사보정 영상
정밀보정영상 L2R 출력, 정밀기하수립 영상
정밀정사영상 L2G 출력, 정밀정사보정 영상
Table 2. List of L2R outputs
파일 형식 내용
Image GeoTiff (.tif) L1R과 동일한 band (R, G, B, N, P) 위성영상
RPC Text (.txt) 정밀기하수립을 통해 갱신된 RPC 파일
Browse Image JPEG (.jpg) 1024 사이즈로 다운샘플링된 영상
World file for Browse Text (.jgw) Browse Image의 공간정보가 저장된 파일
Thumbnail Image JPEG (.jpg) 128 사이즈로 다운샘플링된 영상
Auxiliary File XML (.xml) 위성영상의 메타데이터가 담긴 파일
Boundary shape file
Shape (.shp)
위성영상의 경계를 나타내는 shape 파일 Attribute (.dbf)
Shape index (.shx)
Result Report file Text (.txt) L2R 생성 결과 보고서
Table 3. List of L2G outputs
파일 형식 내용
Image GeoTiff(.tif) 각 band(R, G, B, N, P, PS-R, PS-G, PS-B, PS-N) 정사영상
Browse Image JPEG (.jpg) 1024 사이즈로 다운샘플링된 영상
World file for Browse Text (.jgw) Browse Image의 공간정보가 저장된 파일
Thumbnail Image JPEG (.jpg) 128 사이즈로 다운샘플링된 영상
Auxiliary File XML (.xml) 위성영상의 메타데이터가 담긴 파일
Boundary shape file
Shape (.shp)
위성영상의 경계를 나타내는 shape 파일 Attribute (.dbf)
Shape index (.shx)
Result Report file Text (.txt) L2G 생성 결과 보고서
상과 함께 영상융합된 고해상도 다중분광영상 (PS-Red, PS-Green, PS-Blue, PS-NIR)을 제공한다.
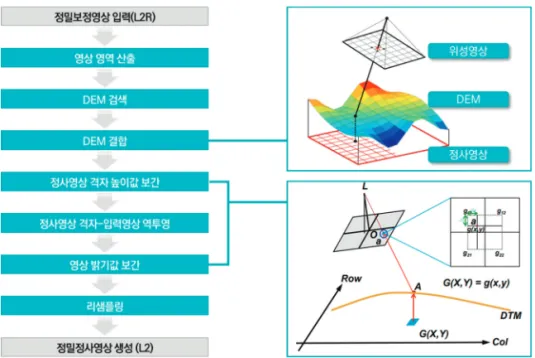
3. 정밀영상생성시스템 처리 과정
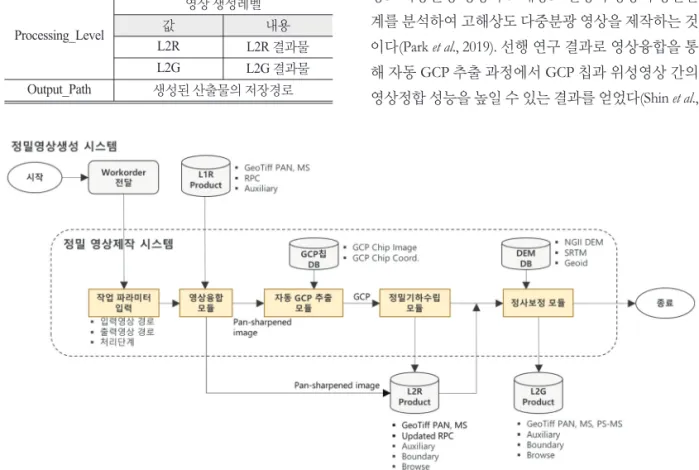
국토관측위성용 정밀영상생성시스템의 처리 과정 은 Fig. 1과 같다. 먼저, 정밀영상 생성을 위한 작업지시 서가 입력된다 . 작업지시서는 Table 4와 같이 작업지시 서 ID, 표준영상이 저장된 입력영상 경로, 최종 산출물 출력 경로 , 처리 단계로 구성되어 있으며, 작업지시서의 내용을 읽어 입력영상과 처리 단계를 설정한다 .
작업지시서 입력 후 , 영상융합 모듈에서 영상융합을 수행하게 된다(Park et al., 2019). 영상융합 후, GCP DB 와 자동 GCP 칩 추출 모듈을 이용하여 입력영상 영역에
포함되는 GCP 칩을 검색하고 입력영상과 영상정합을 통해 GCP 후보점을 추출한다. GCP 후보 추출이 완료 되면, RFM 기반의 Random Sample Consensus(RANSAC) 을 통해 오정합점을 제거하고 최종 GCP를 추출하여 정 밀기하수립 모듈로 GCP를 전달한다. 이후, GCP가 제 공하는 영상좌표 (col, row)와 지상좌표(X, Y, Z)를 이용 하여 정밀기하수립을 수행하고 입력영상의 초기 위치 오차를 제거한 정밀보정영상을 생성한다 . 정밀기하수 립 후, DEM DB와 정사보정 모듈을 이용하여 정사보정 을 통해 정밀보정영상에 포함된 기복변위를 제거하고 정밀정사영상을 생성한다 .
본 시스템을 구성하는 각 모듈과 데이터베이스에 대 한 설명은 다음 장에 기술하였다 .
4. 정밀영상생성시스템 구성
1) 영상융합 모듈
영상융합은 Pan-Sharpening 알고리즘을 통해 저해 상도 다중분광 영상과 고해상도 전정색 영상의 상관관 계를 분석하여 고해상도 다중분광 영상을 제작하는 것 이다 (Park et al., 2019). 선행 연구 결과로 영상융합을 통 해 자동 GCP 추출 과정에서 GCP 칩과 위성영상 간의 영상정합 성능을 높일 수 있는 결과를 얻었다(Shin et al.,
Fig. 1. Process of Precision Image Processing System.
Table 4. Components of workorder
파라미터 내용
WorkOrder ID Workorder ID
Input_Path 입력영상 저장경로
Processing_Level
영상 생성레벨
값 내용
L2R L2R 결과물
L2G L2G 결과물
Output_Path 생성된 산출물의 저장경로
2018). 따라서, 본 시스템에서 자동 GCP 추출 성능을 개 선하기 위해 영상융합 모듈을 구축하여 자동 GCP 추출 의 전처리 단계로 영상융합을 수행하였다 .
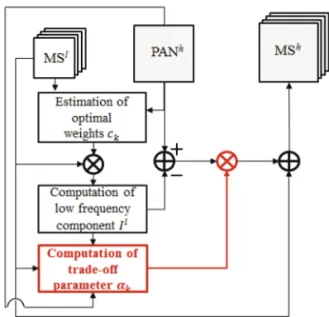
본 모듈에서 구축한 영상융합 모듈의 Pan-Sharpening 알고리즘은 다중분광 영상으로부터 각 밴드의 차분을 통 해 밴드별 고주파 성분을 추출한다는 점에서 Component substitution(CS) 융합 기법들과 유사하다(Oh, 2017; Shin
et al., 2018). 본 모듈의 실행 절차는 Fig. 2와 같다.먼저 , 고해상도 전정색 영상을 이용하여 저해상도
다중분광 영상의 밴드별 가중치를 계산한다 . 두번째, 저해상도 다중분광 영상에 내삽기법을 적용하고 , 앞서 계산된 밴드별 가중치를 고려하여 저주파 전정색 영상 을 제작한다 . 세번째, 고해상도 전정색 영상으로부터 저주파 전정색 영상을 차분하여 고주파 전정색영상을 제작한다 . 네번째, 고해상도 다중분광 영상 제작을 위 해 , 전단계에서 제작한 고주파 전정색 영상의 화소값을 변환하여 내삽된 다중분광영상의 각 밴드별 평균 및 분 산과 동일한 밴드별 융합계수를 계산한다. 마지막으로, 계산된 밴드별 융합계수를 이용하여 고해상도 다중분 광 영상을 제작한다.
2) GCP DB
본 시스템에서 구축한 GCP DB는 국토관측위성용 GCP 칩을 데이터베이스화하여 관리한다. GCP 칩은 이 미 알고 있는 지상좌표와 위성영상 , 항공영상 등의 영 상을 결합한 것으로 , 지상좌표를 영상의 중심점으로 설 정하여 일정한 크기로 자른 영상조각을 의미한다 (Lee and Yoon, 2019). 본 시스템에서 사용하는 GCP 칩은 국 토관측위성을 위해 제작한 GCP 칩으로, 남한 23,142점, 북한 25,205점과 접경지역 1,539점의 GCP칩을 제작하 였다 . 이 GCP 칩의 사양은 Table 5와 같으며, 지상좌표 로 남한은 국가기준점인 통합기준점 , 삼각점과 NGII (National Geographic Information Institute, 국토지리정보
Fig. 2. Process of Pan-Sharpening algorithm.Table 5. Specification of GCP Chip in the Korea Peninsula
남한 북한 접경지역
지상좌표 통합기준점, 삼각점, 사진기준점 사진기준점 사진기준점
영상 종류 항공정사영상 CIB CIB
영상 크기 1027x1027 pixel 257 × 257 pixel 513 × 513 pixel
GSD 0.25 m 1.0 m 0.5 m
밴드 RGB Grey Grey
수량 23,142점 25,205점 1,539점
예시
원)의 기본도 제작에 사용한 사진기준점을 사용하였다.
북한과 접경지역은 기 구축된 KOMPSAT-2 정사영상 에서 독취한 수평 좌표와 NGII의 DEM과 지오이드 (Geoid)를 이용한 높이를 지상좌표로 사용하였다. GCP 칩 영상으로 남한은 NGII의 항공정사영상을 사용하였 으며 , 북한과 접경지역은 국방지형정보단의 Controlled Image Base(CIB) 영상을 사용하였다.
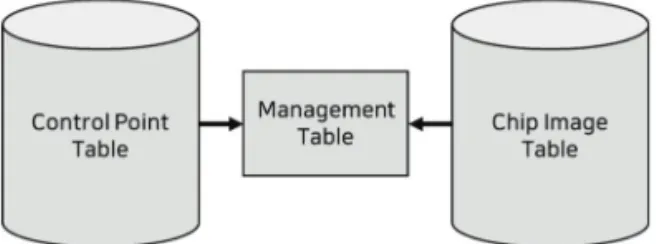
제작된 GCP 칩의 관리를 위해 Fig. 3과 같이 기준점 정보를 갖는 기준점 테이블과 칩 영상의 정보를 갖는 칩 영상 테이블로 GCP 칩을 분리하였다. 기준점과 칩 영 상의 정보를 서로 연결하기 위해 관리 테이블을 생성하 여 두 정보의 관계를 관리한다 . 향후, 이 관리 테이블을 이용하여 기준점과 GCP 칩 영상의 갱신 시 기준점과 칩 영상의 결합 관계를 새로 정의할 수 있다 .
3) 자동 GCP 추출 모듈
자동 GCP 추출 모듈은 입력된 위성영상의 정밀기하 수립에 사용할 GCP를 추출하는 모듈로, 위성영상과
GCP 칩 간의 영상정합을 통해 GCP를 추출한다. 자동 GCP 추출을 위한 절차는 Fig. 4와 같다.
먼저 , 영상융합 모듈에서 영상융합이 완료된 위성영 상을 입력 받아 초기 RPC와 RFM을 이용하여 초기 센서 모델을 수립한다 . 두번째, 초기 센서모델을 이용하여 위 성영상 외곽점의 지상좌표 (X, Y)를 계산하고 GCP DB 에서 위성영상 영역 내에 포함된 GCP 칩을 추출한다.
세번째 , GCP 칩 외곽점(Top-Left, Top-Right, Bottom-Left, Bottom-Right)의 지상좌표를 계산한다. 이후, 외곽점의 지상좌표를 초기 센서모델을 이용하여 위성영상의 영 상좌표로 역투영하고 보간법을 이용하여 GCP칩과 위 성영상의 기하를 일치시킨다 . 네번째, 기하변환된 GCP 칩의 크기와 설정한 검색 영역의 크기에 따라 입력 위 성영상에서 영상정합을 수행할 영역을 추출한다 . 다섯 번째 , 영상을 단계적으로 축소시킨 피라미드 영상을 생 성하고 최상위 레벨에서부터 GCP 칩과 위성영상 간 정 합점을 추출한 다음 추출된 정합점을 활용하여 두 영상 을 정합한다 . 마지막으로, 영상정합 시 활용된 정합점을 GCP로 활용하기 위해 RFM 기반의 RANSAC을 활용하 여 정합점에 포함된 오정합점을 제거함으로써 최종 GCP를 추출한다.
4) 정밀기하수립 모듈
정밀기하수립 모듈은 국토관측위성의 정밀기하수 립을 위해 RFM과 GCP를 이용하여 정밀 센서모델을 수 립하는 기능을 수행한다. 본 모듈에서 사용한 RFM 보 정방법은 RPC를 직접 갱신하는 것이 아닌, 초기 RFM 에 보정 계수를 추가하는 방법으로 RFM을 보정하였다 (Grodecki and Dial, 2003; Yoon and Kim, 2018). 이 방식은,
Fig. 3. Structure of GCP database.Fig. 4. Process of automatic GCP extraction. Fig. 5. Process of bias compensation.
RPC를 직접 갱신하는 방법에 비해 정밀 센서모델링에 필요한 GCP의 수량이 적어, GCP를 취득하는데 필요한 시간과 노력을 줄일 수 있다 . RFM 보정 모델은 1차 다 항식 , 2차 다항식 등 여러 방식이 있으나, 선행 연구를 바탕으로 Affine Model이 적용된 1차 다항식을 사용하 였다 (Jeong et al., 2014; Yoon et al., 2018). 본 시스템의 정 밀기하수립 모듈을 Fig. 5와 같은 절차로 제작하였다.
먼저 , 표준영상에서 제공하는 RPC를 이용하여 초기 센서모델을 수립하였다 . 다음으로, 초기 센서모델을 보 정하기 위해 수식 (1)과 같은 RFM 모델을 설정하였다.
수식에서
a0, a
r, a
c, b
0, b
r, b
c은 미지변수인 RFM 보정 모 델의 보정 계수를 의미하며, Δr과 Δc는 보정 모델로 계 산한 row 방향과 column 방향의 조정량을 의미한다. 조 정량을 산출하기 위해, 자동 GCP 추출 모듈을 통해 획 득한 GCP로 관측방정식을 수립한 후, 최소제곱법을 통 해 RFM 보정모델의 보정계수를 계산하고 row 방향과 column 방향의 조정량을 산출하였다.
Δr = a
0+ a
r·r
k+ a
c·c
kΔc = b
0+ b
r·r
k+ b
c·c
k(1) 이후 , 초기 RFM에 조정량을 더해 초기 센서모델을 보정한 후 갱신된 RPC를 생성하였다.
5) DEM DB
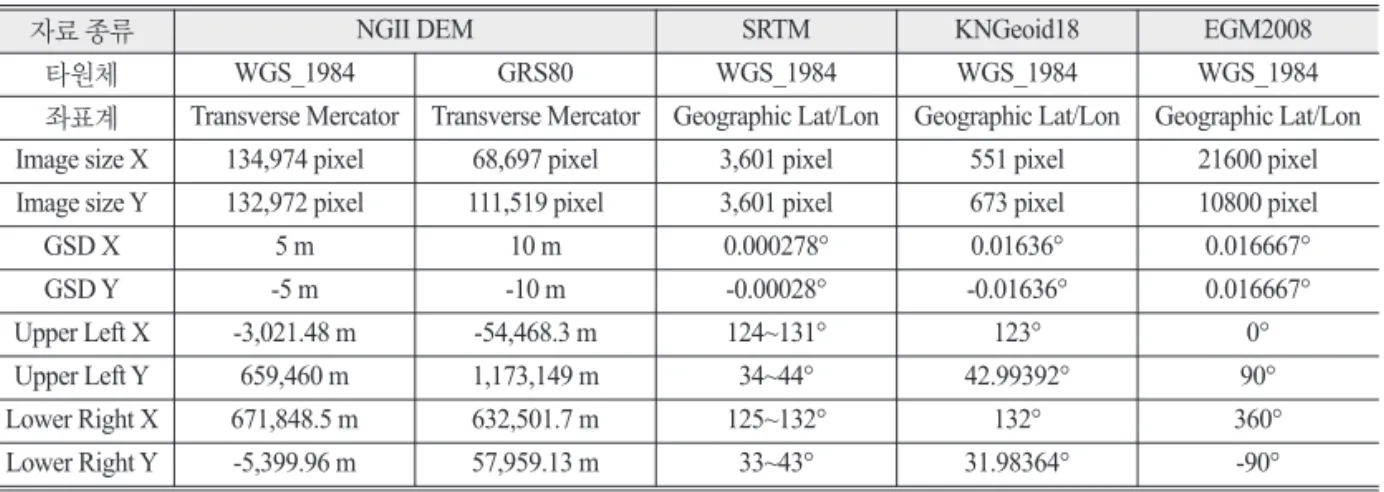
위성영상의 정사보정을 위해서는 지표면의 고도를 알 수 있는 DEM이 미리 구축되어 있어야 한다. DEM DB에 저장된 자료는 지오이드와 DEM으로 구성되며, 위성영상 촬영 지역에 따라 서로 다른 DEM과 지오이 드를 사용하여 높이값을 계산한다 . 본 시스템에서 구축
한 DEM DB 목록은 Table 6과 같다. 한반도를 촬영한 위성영상의 정사보정을 위해 NGII에서 제작한 DEM과 지오이드를 사용하였으며 , 각 자료에 해당하지 않는 영 역에 대해서는 Shuttle Radar Topography Mission(SRTM) 자료를 사용하였다 .
6) 정사보정 모듈
본 시스템의 정사보정 모듈은 DEM을 이용하여 정밀 영상의 기복변위를 제거한 정밀정사영상을 제작한다 . 정밀정사영상 생성을 위한 절차는 Fig. 6과 같다.
먼저 , DEM DB에서 위성영상 영역에 해당하는 DEM 과 지오이드를 검색하기 위해 정밀 센서모델를 이용하 여 위성영상 외곽점 4점의 지상좌표(X, Y)를 계산하고 DEM DB에서 위성영상 영역에 해당하는 DEM과 지오 이드를 추출한다. 다음으로, 정밀 센서모델을 이용해 정 밀보정영상의 격자를 지도좌표계상의 정규격자로 변환 하여 정밀정사영상의 격자를 생성하고 DEM과 지오이 드를 생성된 정밀정사영상의 격자 크기에 맞추어 높이 값을 보간한다 . 이후, 보간된 높이값과 정밀 센서모델을 이용하여 정밀정사영상 격자에 보간된 정밀보정영상의 화소값을 입력함으로써 정밀보정영상을 생성한다 .
7) 시스템 처리 속도본 절에서는 국토관측위성용 정밀영상생성 시스템 의 산출물별 처리 시간을 측정하고 생성된 산출물을 소개한다 . 본 시스템의 각 모듈은 C++로 개발되었으며, 데이터베이스는 PostgreSQL을 이용하여 구축하였다.
시험을 위해 사용한 하드웨어의 사양은 Table 7과 같다.
Table 6. Specifications of DEM and Geoid model in DEM DB
자료 종류 NGII DEM SRTM KNGeoid18 EGM2008
타원체 WGS_1984 GRS80 WGS_1984 WGS_1984 WGS_1984
좌표계 Transverse Mercator Transverse Mercator Geographic Lat/Lon Geographic Lat/Lon Geographic Lat/Lon Image size X 134,974 pixel 68,697 pixel 3,601 pixel 551 pixel 21600 pixel Image size Y 132,972 pixel 111,519 pixel 3,601 pixel 673 pixel 10800 pixel
GSD X 5 m 10 m 0.000278° 0.01636° 0.016667°
GSD Y -5 m -10 m -0.00028° -0.01636° 0.016667°
Upper Left X -3,021.48 m -54,468.3 m 124~131° 123° 0°
Upper Left Y 659,460 m 1,173,149 m 34~44° 42.99392° 90°
Lower Right X 671,848.5 m 632,501.7 m 125~132° 132° 360°
Lower Right Y -5,399.96 m 57,959.13 m 33~43° 31.98364° -90°
본 시험을 위해, 북한 2장, 접경지역 4장, 남한 6장의 영상을 이용하여 , 정밀보정영상 및 정밀정사영상을 생 성하였다 . 국토관측위성이 아직 발사되지 않았으므로, 국토관측위성과 유사한 사양을 갖는 KOMPSAT-3A 위 성영상을 시험영상으로 사용하였다. Fig. 7은 시험에 사 용한 입력영상의 분포를 나타낸다.
Fig. 6. Process of orthorectification.
Fig. 7. Distribution of used image.
Table 7. Specifications for used H/W
하드웨어 종류 사양
CPU Intel i7-8700K @ 3.7GHz
GPU NVDIA GTX 1070
RAM 32GB
Storage HDD 2TB
OS Windows 10 Pro
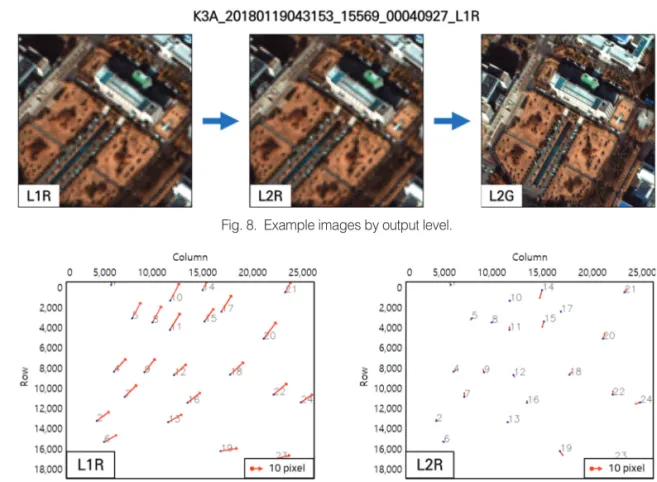
본 시험을 통해 Fig. 8의 L2R, L2G와 같은 산출물을 생성하였다 . Fig. 8는 생성한 산출물을 확대한 그림으로 L1R은 시험을 위해 사용한 입력영상, L2R과 L2G는 시 스템 산출물인 정밀보정영상과 정밀정사영상이다 .
L2R은 L1R의 RPC를 정밀기하수립을 통해 갱신한 영 상으로 Fig. 8의 L1R과 L2R의 영상은 동일하나 Fig. 9와 같이 센서 모델의 오차가 줄어든 것을 확인할 수 있다 . Fig. 9는 센서모델 오차를 나타내는 그림으로 L1R은 초
Fig. 8. Example images by output level.Fig. 9. Visualization of sensor model error in image-space.
Table 8. Result of measured system processing time
위성영상명 처리시간
L2R L2G
K3A_20170223044142_10582_00075117_L1R 546초 1,161초
K3A_20180119043153_15569_00040927_L1R 620초 1,360초
K3A_20180127044122_15690_00040490_L1R 668초 1,349초
K3A_20160512043853_06245_00439931_L1R 537초 1,168초
K3A_20190129043331_21236_00555909_L1R 711초 1,739초
K3A_20151229044555_04205_00026580_L1R 880초 1,780초
K3A_20170223044142_10582_00004060_L1R 786초 1,681초
K3A_20170223044142_10582_00019908_L1R 696초 1,685초
K3A_20200508041443_28263_00041150_L1R 505초 1,712초
K3A_20200508041443_28263_00060002_L1R 548초 1,717초
K3A_20200508041443_28263_00069491_L1R 483초 1,502초
K3A_20190216043344_21508_00003619_L1R 536초 1,553초
K3A_20190216043344_21508_00026818_L1R 516초 1,176초
평균 617.8초 1506.4초
기 RPC를 이용하여 센서모델을 수립한 결과로 센서모 델 오차가 한 방향으로 경향성을 보이며 오차의 크기는 10pixel 이상이다. 반면, 갱신된 RPC를 이용하여 센서모 델을 수립한 L2R에서는 오차의 방향이 불규칙하며 오 차의 크기 또한 감소한 것을 확인할 수 있다 (생성한 산 출물의 위치정확도 분석은 별도의 논문으로 분석한다 ).
L2G는 L2R의 갱신된 RPC와 DEM을 이용하여 정사 보정한 영상으로 Fig. 8에서 L1R, L2R 영상과 기하특성 이 다른 것을 확인할 수 있다 .
Table 8은 입력영상별 산출물 생성시간을 나타내며, 산출물 처리 시간을 측정하기 위해, 시스템에 입력영상 이 입력된 시점부터 각 단계별 산출물 생성까지 걸린 시 간을 측정하였다. 시험 결과, 위성영상의 입력부터 정밀 보정영상 생성까지 약 10분, 정밀정사영상 생성까지 약 25분의 시간이 걸릴 것으로 판단된다.
5. 결론
본 논문은 국토관측위성용으로 개발된 정밀영상생 성시스템에 대해서 소개하였다 . 정밀영상생성시스템 의 정규 산출물로 표준영상의 위치오차를 제거한 정밀 보정영상과 위성 촬영기하에 따른 기복변위를 제거한 정밀정사영상을 생성한다 . 이 산출물들은 위성영상의 기하학적 왜곡을 제거하여 정밀한 기하정확도를 갖는 영상으로 변화탐지 , 국토모니터링, 디지털트윈 등 여러 분야에 활용될 수 있는 기초자료로 사용할 수 있다.
또한, 본 시스템은 한반도 전역을 대상으로 GCP칩을 구축하고 GCP칩과 위성영상의 영상정합 기법을 활용 한 자동 GCP 추출 기능을 구현하였다. 이를 통해 수동 으로 GCP를 추출하는 기존 방식의 단점을 획기적으로 보완하여 , 국토관측위성으로부터 촬영된 모든 위성영 상에 대해서 자동화된 방식으로 정밀정사영상으로 제 작하여 사용자에게 제공할 수 있는 토대를 마련하게 되 었다 .
향후 , 본 과제를 통해 개발한 자동 GCP 추출 알고리 즘과 GCP DB를 국토관측위성과 유사한 사양을 갖는 저궤도 관측위성에도 적용할 수 있을 것으로 생각된다 . 본 시스템을 개발하면서 구축한 현재의 GCP DB와 DEM DB의 적용범위는 한반도이나, 향후 해외지역에
도 자동화된 방식으로 정밀정사영상을 제작하기 위한 연구가 필요하다고 생각된다 .
사사
본 연구는 국토교통부 위성정보 활용센터 설립 운영 사업 (과제명: 국토위성정보 수집 및 활용기술개발)의 연구비지원 (과제번호: 20SIUE-B148326-03)에 의해 수 행되었습니다 .
References
Grodecki, J. and G. Dial, 2003. Block adjustment of high-resolution satellite images described by rational polynomials, Photogrammetric Engineering
and Remote Sensing, 69(1): 59-68.Jeong, J.H., J.I. Kim, and T. Kim, 2014. Analysis of Geolocation Accuracy of KOMPSAT-3 Imagery,
Korean Journal of Remote Sensing, 30(1): 37-45(in Korean with English abstract).
Kim T. and Y.J. Im, 2003. Automatic Satellite Image Registration by Combination of Stereo Matching and Random Sample Consensus, IEEE Trans.
on Geoscience and Remote Sensing, 41(5):
1111-1117
Lee, K.D. and J.S. Yoon, 2019. GCP Chip Automatic Extraction of Satellite Imagery Using Interest Point in North Korea, Journal of the Korean
Society of Surveying, Geodesy, Photogrammetry and Cartography, 37(4): 211-218 (in Koreanwith English abstract).
Lee, H.S., D.C. Seo, K.W. Ahn, and D.J. Jeong, 2013.
Positioning Accuracy Analysis of KOMPSAT-3 Satellite Imagery by RPC Adjustment, Journal
of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, 31(6): 503-509(in Korean with English abstract).
Oh, K., 2017. Efficient pansharpening and autocalibration
methods of high spatial satellite images: application to KOMPSAT images, Ph. D. dissertation, University