http://dx.doi.org/10.5369/JSST.2017.26.5.331 pISSN 1225-5475/eISSN 2093-7563
FSR 로 구성된 촉각 센서 패드용 Readout 회로의 설계 및 구현
윤선호1 · 백승희1 · 김청월2,
+
Design and Implementation of a Readout Circuit for a Tactile Sensor Pad Based on Force Sensing Resistors
Seon-ho Yoon1, Seung-hee Baek1 and Cheong-worl Kim2,+
Abstract
A readout circuit for a tactile sensor pad based on force sensing resistors was proposed, which was composed of an analog signal conditioning circuit and a digital circuit with a microcontroller. The conventional signal conditioning circuit has a dc offset voltage in the output signal, which results from the reference voltage applied to the FSR devices. The offset voltage reduces the dynamic range of the circuit and makes it difficult to operate the circuit under a low voltage power supply. In the proposed signal conditioning circuit, the dc offset voltage was removed completely. The microcontroller with A/D converter and D/A converter was used to enlarge the mea- surement range of pressure. For this, the microcontroller adjusts the FSR reference voltage according to the resistance magnitude of FSR under pressure. The operation of the proposed readout circuit which was connected to a tactile sensor pad with 5 x 10 FSR array was verified experimentally. The experimental results show the proposed readout circuit has the wider measurement range of pressure than the conventional circuit. The proposed circuit is suitable for low voltage and low power applications.
Keywords: Force sensing resistor, Readout circuit, Tactile sensor pad, Signal conditioning circuit
1. 서 론
힘의 변화를 저항의 크기로 변환하는 저항형 압력소자(Force Sensing Resistor, FSR) 는 얇고 유연하여 여러 가지 모양으로 만 들 수 있어서 힘의 상대적 크기나 힘의 분포도 측정을 필요로 하는 가전기기나 의료기기 등에 사용되고 있다[1,2]. 응용 분야 를 보면 앉은 자세에서 의자의 압력 분포를 측정하여 자세 교 정에 적용하였고[3], 족저압 분포를 측정하여 인체의 무게 중심 을 분석하고 이를 낙상 피해를 최소화하는데 사용하였으며[4], 베개와 침대의 압력 분포를 측정하여 수면 자세 분석에 적용하 였다[5]. 또한 다리 근육의 압력 분포를 측정하여 걷기 보조장
치인 외골격 장치를 구동하였고[6], 핸들의 압력 분포를 측정하 여 휠체어나 트롤리(trolley)를 구동하였다[7].
FSR 에 인가되는 힘을 전기적 신호로 변환하는 신호 컨디션닝 (conditioning) 회로를 구현하는 방법으로는 전압분배방식, 발진 회로방식 및 전류-전압 변환방식이 사용되고 있다[8,9]. 전압분 배방식은 구조가 간단하고 제작이 용이하여 많이 사용되고 있 으나, FSR의 저항 특성이 인가되는 힘의 크기에 따라 근사적으 로 반비례하여 힘의 크기가 너무 커지거나 작아지는 경우에는 비선형 특성으로 인하여 해상도에 나빠지는 단점이 있다[8]. 이 를 해결하려면 전압분배에 사용되는 저항의 크기를 힘의 사용 범위에 따라 적절히 선택하여야 한다.
발진회로방식은 슈미트 트리거(Schmitter trigger) 회로와 충방 전 회로로 구성된다. 저항과 콘덴서로 구성된 충방전 회로에서 저항을 FSR로 변경하면 인가되는 힘의 크기에 따라 저항 값이 변화하여 충방전 시정수를 변화시킴으로 발진 주파수가 변화하 는 발진회로를 만들 수 있다. 발진회로의 출력신호가 구형파이 므로 디지털 회로에 사용하기 적합하나, 여러 개의 센서가 사용 되는 센서 패드(pad)에 사용하기는 부적합하고, 저항분배방식에 서처럼 힘이 너무 커지거나 작아지는 경우에는 해상도가 나빠진다.
FSR 의 저항 특성은 인가되는 힘의 크기에 근사적으로 반비례 하지만 저항을 컨덕턴스(conductance)로 변환하면 힘의 크기에 따라 근사적으로 비례한다[8]. 컨덕턴스로의 변환은 전류-전압
1안동대학교 대학원 바이오 ICT 융합공학과(Department of Bio ICT Engineering, Graduate School, Andong National Unversity)
1375 Gyeongdong-ro, Andong, 36729, Korea
2안동대학교 전자공학교육과(Department of Electronics Education Engineering, Andong National Unversity)
1375 Gyeongdong-ro, Andong, 36729, Korea
+Corresponding author: [email protected]
(Received: Aug. 1, 2017, Revised: Sep. 18, 2017, Accepted: Sep. 19, 2017)
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/
licenses/bync/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
변환방식을 사용하여 구현할 수 있다. 이 방식을 사용하면 저항 분배방식에서 나타나는 해상도 문제점을 개선할 수 있다.
전류-전압 변환방식에 사용되는 기존의 신호 컨디션닝 회로 는 출력신호에 오프셋 전압이 존재하여 출력신호에서 오프셋 전 압이 차지하는 비율만큼 회로의 다이나믹(dynamic) 범위가 줄 어드는 단점이 있다. 특히 저 전압을 전원으로 사용하는 회로에 서 반드시 오프셋 전압을 제거하여야 한다. 이를 제거하려면 음 의 전압을 이용할 수 있으나 추가적인 음의 전압 발생회로가 필 요하다. 또한 힘의 측정 범위가 바뀌면 회로의 이득을 변경하거 나 FSR에 인가되는 전압을 변경하여야 한다. 기존 회로에 마이 크로컨트롤러의 펄스폭 변조 기능을 적용하여 FSR에 인가되는 전압을 변경하는 방법이 제안되었으나[9], 인가 전압에 따라 출 력신호의 오프셋 전압이 변하는 문제점이 있다.
본 논문에서는 전류-전압 변환방식의 회로에서 출력신호의 오 프셋 전압을 제거하는 새로운 신호 컨디션닝 회로를 제안하였 고, 이를 바탕으로 힘의 측정 범위를 더 확장하기 위해 FSR에 인가되는 힘의 크기에 따라 FSR에 인가되는 전압을 제어하는 알고리즘을 제안하였다.
제안된 회로와 알고리즘은 5 x 10 FSR 소자로 구성된 촉각 센서 패드를 사용하여 그 동작을 확인하였다.
2. Readout 회로 설계
2.1 전류-전압 변환방식의 구조
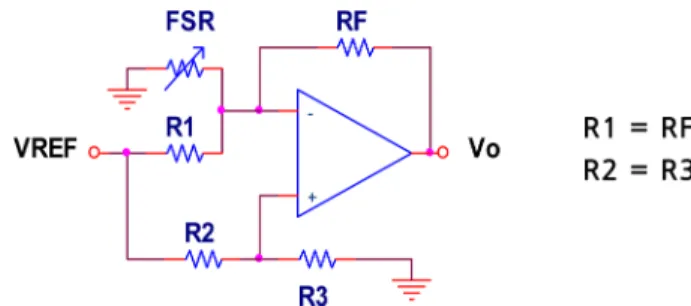
기존의 전류-전압 변환방식의 회로는 Fig. 1에 나타나 있는 것 처럼 연산증폭기를 이용한 비반전 증폭기 구조로 구현된다[8,9].
Fig. 1의 (a) 회로에서 연산증폭기의 비반전 단자에 기준전압 V
REF를 인가하면 FSR의 저항 값 R
FSR크기에 반비례하는 전류 가 저항 R
F로 흘러서 출력신호 V
O는 수식 (1) 처럼 나타난다.
(1)
수식 (1)에서 첫 번째 항은 FSR의 저항 값에 반비례하는 전 압 신호를 나타내고, 두 번째 항은 불필요한 오프셋 전압을 나
타낸다. 이를 제거하는 방법으로 음의 기준전압을 사용하는 회 로가 Fig. 1의 (b)에 주어져 있다[8,10].
본 논문에서는 Fig. 2에 제안된 회로를 사용하여 음의 기준전 압을 사용하지 않고 증폭기의 출력신호에서 오프셋 전압을 제 거하였다.
Fig. 2의 회로에서는 저항 R
2와 저항 R
3를 같은 크기로 설정 하면 연산증폭기의 비반전 단자에는 기준전압 V
REF의 1/2 크기 전압이 인가되어 출력 신호 V
O는 수식 (2)와 같이 나타낼 수 있다.
(2)
수식 (2)에서 첫 번째 항과 두 번째 항은 모두 출력신호 V
O의 오프셋 전압을 나타내고, 세 번째 항은 FSR 저항 값에 따라 변화하는 전압 신호를 나타낸다. 저항 R
1과 저항 R
F를 같은 크 기로 설정하면 첫 번째 항과 두 번째 항이 서로 상쇄되어 오프 셋 전압이 사라져서 수식 (3)에 주어진 것처럼 출력신호 V
O에 는 FSR 저항 값에 따라 변하는 전압 신호만 나타난다.
(3)
제안된 회로는 출력신호에 오프셋 전압이 존재하지 않아서 오 프셋 전압에 의하여 신호 다이나믹 범위 감소되는 문제가 발생 되지 않는다. 레일-투-레일(rail-to-rail) 입출력 특성을 가진 연산 증폭기를 사용할 경우에는 출력신호는 접지부터 전원전압 크기 까지 동작 범위로 사용할 수 있다.
2.2 기준전압 자동 조정 알고리즘
수식 (3)에서 FSR에 인가되는 힘이 증가하여 FSR의 저항 값 이 일정한 값 이하로 작아지게 되면 출력신호가 전원전압에 의 하여 리미팅(limiting) 된다. 이를 해결하려면 측정하려는 힘의 범위에 따라 Fig. 1의 기존 회로뿐만 아니라 Fig. 2의 제안 회 로에서도 저항 R
F의 크기나 기준전압 V
REF의 크기를 적절히 설 정하여야 한다.
촉각 센서 패드처럼 FSR에 인가된 힘의 범위가 넓은 경우에 는 저항 R
F의 크기와 기준전압 V
REF의 크기를 고정하면 작은 힘 V
oR
FR
FSR---V
REF+ V
REF=
V
OV
REF--- 2 R
FR
1--- V
REF--- 2
– R
FR
FSR--- V
REF--- 2 +
=
V
OR
FR
FSR--- V
REF--- 2
=
Fig. 1. Conventional FSR signal conditioning circuits. (a) With the offset voltage at the output. (b) Without the offset voltage at the output.
Fig. 2. Proposed signal conditioning circuits for FSR.
이나 큰 힘 중에서 어느 한 쪽은 희생을 감수해야 한다. 그러나 상대적으로 변경이 어려운 저항 R
F의 크기는 고정하고 기준전 압 V
REF의 크기를 FSR에 인가되는 힘의 크기 즉 FSR의 저항 값 R
FSR에 따라 조정할 수 있다면 힘의 측정 범위를 더 확장할 수 있다.
수식 (3)을 이용하여 FSR의 저항 값 R
FSR를 구하면 수식(4)와 같이 나타낼 수 있다.
(4)
Fig. 2 의 회로에서 출력신호 V
O의 측정 값이 일정한 범위 안 에 들어가도록 기준전압 V
REF의 크기를 조정하고, 측정된 출력 신호의 크기와 조정된 기준전압을 수식 (4)에 적용하면 FSR의 저항 값을 계산할 수 있다. 이러한 일련의 동작들은 A/D 변환 기와 D/A 변환기가 내장된 마이크로컨트롤러를 사용하여 소프 트웨어로 구현할 수 있다. A/D 변환기는 증폭기의 출력신호를 측정하는데 사용되고, D/A 변환기는 증폭기에 인가되는 기준전 압을 발생하는데 사용된다.
Fig. 4 에는 마이크로컨트롤러에 내장된 n-비트 A/D 변환기와 D/A 변환기를 사용하여 FSR에 인가되는 힘의 크기에 따라 기 준전압을 제어하면서 FSR의 저항 값을 측정하는 알고리즘의 흐 름도를 나타내었다.
D/A 변환기를 리셋(reset)한 후에 D/A변환기의 최상위 비트
(bit)를 세트(set)한다. 이때 출력되는 D/A변환기의 전압을 Fig.
2의 회로에서 기준전압 V
REF으로 사용하여 증폭기의 출력신호 를 A/D 변환한다. A/D 변환 값이 미리 설정한 출력신호의 상 한 값보다 큰 경우에는 D/A 변환기의 현재 비트를 리셋시키고 다음 하위 비트를 세트시킨다. A/D 변환 값이 상한 값보다 작 아질 때가지 비트를 이동하면서 동일한 과정을 되풀이 한다.
A/D 변환 값이 출력신호의 상한 값보다 작은 경우에는 A/D 변환 값을 출력신호의 하한 값과 비교한다. A/D 변환 값이 하 한 값보다 큰 경우에는 AD 변환 값을 사용하여 FSR의 저항 값 을 계산하고, 작은 경우에는 다음 하위 비트를 세트하여 동일한 과정을 되풀이 한다.
예를 들어 8-비트 D/A 변환기와 8-bit A/D 변환기를 사용할 경우에는 다음과 같은 수식으로 FSR의 저항 크기를 계산할 수 있다.
(5)
여기서 (DAC)와 (ADC)는 각각 D/A 변환기의 설정 값과 A/
D 변환기의 변환 결과를 나타낸다.
2.3 배열 구조에 대한 회로 설계
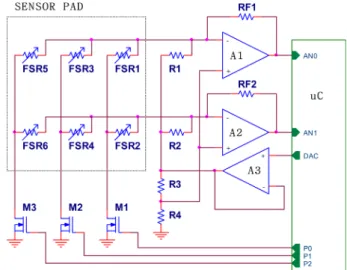
FSR 에 인가되는 힘의 크기에 따라 기준전압을 자동 조정하여 힘의 측정범위를 확장시키는 센서 패드용 readout 회로의 등가 회로를 Fig. 5에 나타내었다. 회로의 동작 원리를 설명하기 위 해 2 x 3 배열 구조에 대한 회로도로 나타내었으나 다른 배열 구조로도 쉽게 확장할 수 있다.
Fig. 5 에서 마이크로컨트롤러 uC는 아날로그 채널 스위치, A/
D 변환기 및 D/A 변환기를 내장하고 있다. 연산증폭기 A
3가 전 압 폴로우(follower)로 동작하고 있어서 D/A 변환기의 출력단자 DAC 에서 출력되는 기준전압 V
REF은 저항 R
1과 R
2에 인가된다.
R
FSRR
F--- 2 V
REFV
O---
=
R
FSRR
F--- 2 ( DAC )
( ADC ) ---
=
Fig. 4. Flowchart of the proposed algorithm.
Fig. 5. Simplified circuit diagram of the proposed readout circuit for
2 x 3 FSR array structure
저항 저항 R
3과 R
4를 같은 크기로 설정하면 기준전압 V
REF의 1/2 크기 전압이 연산증폭기 A
1과 A
2의 비반전 단자에 인가된 다. 저항 R
1, R
2, R
F1및R
F2를 모두 같은 값으로 설정하면 아날 로그 채널 입력 AN0와 AN1에 나타나는 증폭기의 출력신호에 는 기준전압 V
REF으로 인해 발생되는 오프셋 전압이 나타나지 않는다.
아날로그 스위치로 사용되는 MOS 트랜지스터 M
1-M
3은 선 택되는 열에 해당되는 것만 온(on) 상태가 되고 나머지는 오프 (off) 상태가 된다. 예를 들어 트랜지스터 M
1만 온 상태인 경우 에는 FSR
1과 FSR
2에 해당되는 신호가 각각 증폭기 A
1과 A
2의 출력에 나타난다. 이때 트랜지스터 M
2와 M
3는 오프 상태에 있 어서 FSR
3과 FSR
4는 직렬 연결 회로가 되고, 연결된 회로 양단 에는 각각 기준전압 V
REF의 1/2 크기 전압이 인가된다. 회로 양 단에 같은 전위가 나타나서 FSR
3과 FSR
4에 전류가 흐르지 않 으므로 해당 증폭기의 출력신호에 영향을 미치지 않는다. 같은 원리로 FSR
5과 FSR
6도 전류가 흐르지 않아서 해당 증폭기의 출 력신호에 영향을 미치지 않는다.
Fig. 4 의 알고리즘을 프로그램으로 구현하고 수식 (5)를 이용 하면 FSR의 저항 값을 계산할 수 있다. 계산된 저항 값을 FSR 특성 데이터로 환산하면 FSR에 인가되는 힘을 측정할 수 있다.
2.4 증폭기의 궤환 저항 설계
기준전압을 조정하여 측정범위가 늘어나도 FSR에 인가되는 힘이 더 커지면 FSR의 저항 값이 더 작아져서 출력전압이 증 가하여 궁극적으로 전원전압 크기에 도달하여 리미팅 된다. 이 를 방지하려면 Fig. 5에서 증폭기의 궤환 저항 R
F1과 R
F2의 크 기를 FSR에 인가되는 힘의 크기에 따라 적절히 설정하여야 한다.
FSR 인가되는 최대 힘에 의해 결정되는 FSR의 최소 저항 값
R
FSR,MIN과 수식 (3)을 이용하면 궤환 저항의 크기 R
F는 다음과
같은 수식으로 계산할 수 있다.
(6)
위의 수식에서 레일-투-레일 입출력 특성을 가진 연산증폭기 를 사용하면 V
O,MAX는 전원전압이 되고, V
REF,MIN는 D/A 변환 회로의 최저 값과 연산증폭기의 오프셋 전압에 의하여 결정된다.
궤환 저항의 크기가 결정되면 수식 (4)과 수식 (6)을 이용하 여 측정 가능한 FSR의 최대 저항 크기 R
FSR,MIN과 최소 저항 크
기 R
FSR,MAX은 각각 다음 수식으로 계산할 수 있다.
(7)
(8)
여기서 V
REF,MAX와 V
REF,MIN은 각각 증폭기에 인가되는 기준전
압의 최대 값과 최소 값을 나타내고, V
O,MAX와 V
O,MIN은 각각 증 폭기 출력신호의 최대 값과 최소 값을 나타낸다. R
FSR,MIN과 R
FSR,MAX을 FSR 특성을 이용하여 환산하면 측정할 수 있는 최대 힘의 크기와 최소 힘의 크기를 결정할 수 있다.
3. 실험 및 결과
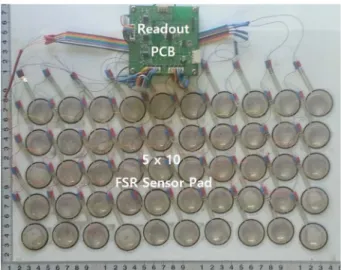
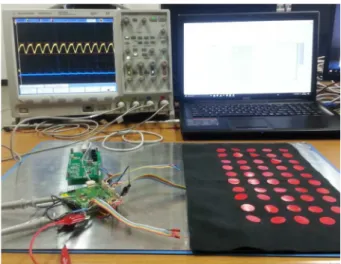
제안된 회로와 알고리즘을 이용하여 readout 회로를 설계 제 작하고, Tekscan 사의 FSR 소자인 A401로 구성된 5 x 10 촉각 센서 패드를 제작하여 그 동작 특성을 측정하였다. 제작된 readout 회로와 센서 패드는 Fig. 6에 나타내었다.
제안된 readout 회로에서 마이크로컨트롤러로는 A/D 변환기 와 D/A 변환기를 내장한 PIC16F1782를 사용하였고, 연산증폭 기로는 레일-투-레일 입출력 특성을 지닌 MCP6022를 사용하였 다. 제작된 회로는 3.3 V의 전원전압으로 동작하였고, 5.6 mW 의 전력을 소비하였다.
전원전압과 접지에 나타날 수 있는 잡음의 크기를 고려하여 증폭기 출력신호의 최고 전압과 최저 전압을 각각 3.1 V와 0.2 V 로 설정하였고, FSR에 인가되는 기준 전압의 최고 값과 최저 값도 증폭기의 출력신호와 동일하게 설정하였다. 이 값들에 상 응되는 디지털 값들이 Fig. 4의 흐름도에서 각각 A/D 변환신호 의 상한 값 HiLMT와 하한 값 LoLMT으로 사용되었다.
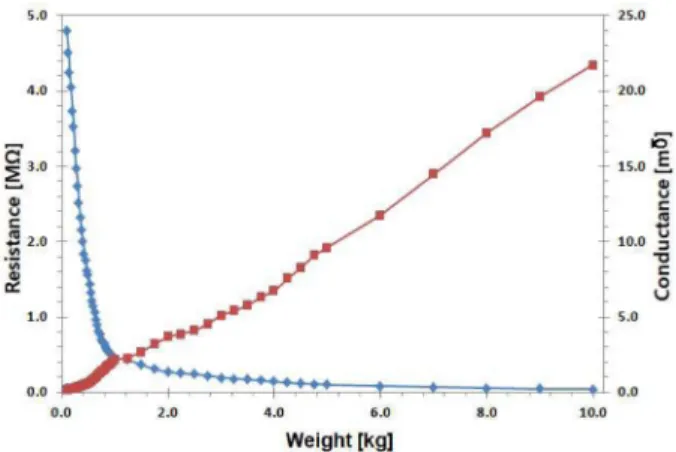
A401 센서에 인가되는 무게에 따라 저항 값을 측정하여 Fig.
7에 나타내었다. A401의 드리프트(drift) 특성과 히스테리 특성 때문에[11] 측정된 데이터는 근사값을 나타낸다. Fig. 7에 나타 나는 것처럼 FSR의 저항 특성은 무게에 따라 근사적으로 반비 례하지만, 컨덕턴스로 변환하면 무게에 따라 근사적으로 비례한다.
A401 을 기준으로 제안된 readout 회로, 제안된 신호 컨디션닝 회로 및 기존의 신호 컨디션닝 회로에 대한 측정 범위를 수식 R
F2 V
O . MAXV
REF MIN,---R
FSR MIN,=
R
FSR MAX,R
F--- 2 V
REF MAX,V
O MIN,---
=
R
FSR MIN,R
F--- 2 V
REF MIN,V
O MAX,---
=
Fig. 6. PCB and sensor pad used in the experiment.
(1), 수식 (3), 수식 (7)과 수식(8)을 사용하여 계산하고, 그 결과 를 Table 1에 나타내었다.
Table 1 에서 신호 컨디션닝 회로를 비교해 보면 제안된 회로 에서는 기준전압을 1 V로 설정하면 출력신호에 오프셋 전압이 존재하지 않아서 출력신호의 최저 값은 설정한 0.2 V로 나타나 지만, Fig. 1의(a)에 주어진 기존 회로에서는 수식 (1)에 나타나 는 것처럼 기준전압이 출력신호에 오프셋 전압으로 나타나므로 출력신호의 최저 값이 기준 전압에 의하여 결정되어 1 V가 된 다. 만약 FSR의 저항 값 때문에 기준전압을 2 V로 증가시키면 제안된 회로의 출력신호의 최저 값은 변화가 없으나 기존회로 의 최저 값은 2 V로 증가하여 다이나믹 범위가 더 감소하게 된다.
기존 회로에서는 출력신호에 나타나는 기준전압만큼 신호의 동작 범위가 줄어들어 측정 범위가 감소된다. 더 작은 힘을 측 정하기 위해 기준전압을 증가시키면 측정 범위가 더욱 줄어들게 된다.
Table 1 에 나타나는 것처럼 무게의 측정 범위는 제안된 readout 회로가 가장 넓다. 이는 FSR에 인가되는 힘의 크기에 따라 기 준전압을 변화시키는 방법에 기인한다.
제작된 readout 회로의 동작 특성을 확인하기 위하여 인접한 3 개의 센서에 130 g, 750 g과 20 kg을 올려 놓고, 해당 증폭기
의 출력신호와 함께 기준전압의 자동제어 되는 동작을 측정하 여 Fig. 8에 나타내었다.
Fig. 8에서 CH1 파형은 D/A 변환기에서 출력되는 기준전압 신호를 나타내고, CH2-CH4 파형은 각각 130 g , 750 g과 20 kg 을 올려놓은 FSR에 연결된 증폭기의 출력신호를 나타낸다.
CH1 파형의 시점 S1에서 시작하여 시점 S2직전까지가 CH2 파형의 증폭기에 기준전압이 인가되는 구간이다. 이 구간 동안 에 Fig. 4의 알고리즘이 수행되면서 CH2 파형의 시점 SP1에서 FSR 에 인가되는 힘의 측정이 완료된다.
CH1 파형에서 시점 S2와 S3는 각각 CH3와 CH4 파형의 증 폭기에 인가되는 기준전압의 시작점을 나타내고, CH3과 CH4 파형에서 시점 SP2와 SP3은 각각 해당 신호에서 힘의 측정이 완료되는 시점을 나타낸다.
CH1 파형을 보면 증폭기에 인가되는 기준전압이 1.65 V로 동 일하게 시작되지만 측정이 완료되는 시점 SP1, SP2 및 SP3에 서는 FSR에 인가되는 무게에 따라 기준전압이 변화하여 각각 3.1 V, 2.0 V 및 200 mV으로 조정됨을 알 수 있다. 이때 CH2, CH3 및 CH4에서 최종 샘플링되어 저항 값 계산에 사용되는 전 압은 각각 200 mV, 450 mV, 3.1 V가 된다.
제안된 readout 회로에 A401을 연결하여 무게에 따라 기준전 압과 비반전 증폭기의 출력 신호를 측정하고, 이를 이용하여 수 식 (5)에 따라 A401의 저항 값을 계산한 결과가 Fig. 9에 나타나 있다.
기존의 FSR 신호 컨디션닝 회로에서는 기준 전압이 고정되 어 있으나, Fig. 9에 나타난 것처럼 제안된 readout 회로에서는 FSR에 인가되는 힘의 크기가 따라 기준전압이 변화하여 힘의 측정 범위를 넓혀 줌을 확인할 수 있다.
제안된 readout 회로와 5 x 10 FSR 촉각 센서 패드를 Fig. 10 과 같이 설치하여 실험을 수행하였다. 센서 패드를 절연소재로 된 천으로 포장하여 센서 패드와 피실험물 사이의 간섭을 최소 화하였다.
FSR 에 힘이 가해지지 않는 경우에는 수 MΩ의 큰 저항을 나 타내므로 외부 잡음이 쉽게 유기 된다. 이를 차단하기 위하여 Fig. 7. Resistance–to-weight characteristic of A401.
Table 1. Comparison of measurement range
item1
Proposed Readout
Circuit
Proposed Signal Conditioning
Circuit
Conventional Signal Conditional
Circuit Reference
Voltage
0.2 V to 3.1 V
1.0 V 1.0 V
Output Signal
0.2 V to 3.1 V
0.2 V to 3.1 V
1.0 V to 3.1 V Min. FSR
(Weight)
18 kΩ (20 kg)
90 kΩ (5.7 kg)
90 kΩ (5.7 kg) Max. FSR
(Weight)
4.34 MΩ (130 g)
1.4 MΩ (530 g)
280 kΩ
(1.8 kg) Fig. 8. The reference signal and the output signal in the proposed
readout circuit.
센서가 부착한 절연체 면을 접지된 알루미늄 판 위에 올려 놓 았다. 이때 잡음의 크기가 100 mV이하로 측정되었다. 이를 고 려하여 출력신호와 기준전압의 최저 값을 Table 1에 나타나 있 는 것처럼 0.2 V로 설정하였다.
데이터 분석 및 처리에는 NI 사의 LabVIEW 소프트웨어를 이용하였다.
촉각 패드에 오른 손을 올려 놓았을 경우에 압력의 분포를 Fig. 11 에 나타내었다. 힘의 크기가 클수록 검은색에 가까워지 고 작을수록 흰색에 가까워지도록 분포도를 나타내었다. 총 19 개의 센서에 압력을 가해지고 있으며, 손목에서 손바닥 중심으 로 가거나 손가락에서 손바닥 중심으로 갈수록 FSR 센서에 인 가되는 압력이 점차 줄어 드는 것을 확인 할 수 있었다.
4. 결 론
본 논문에서는 FSR 소자로 구현된 촉각 센서 패드에 사용되 는 readout 회로를 제안하였다. 제안된 readout 회로에서는 기존 회로의 출력 신호에 나타나는 오프셋 전압을 제거하기 위해 새 로운 신호 컨디션닝 회로를 사용하여 출력신호의 다이나믹 범 위를 증가시켰고, A/D 변환기와 D/A 변환기가 내장된 마이크 로컨트롤러를 사용하여 FSR에 인가되는 기준전압을 FSR에 인 가되는 힘의 크기에 따라 변화시킴으로써 힘의 측정 범위를 확 대시켰다.
오프셋 전압 제거 기능과 기준전압 자동 조정 기능으로 제안 된 readout 회로는 저 전압 전원회로에서도 동작이 가능하여 건 전지로 작동하는 FSR 응용분야에 사용할 수 있다.
제작된 촉각 패드와 회로는 5 x 10 배열로 구현하였으나 다 양한 크기로 쉽게 구현이 가능하며, 증폭기의 궤환저항을 조정 하여 신호 컨디션닝 회로의 이득을 변경하면 압력의 측정 범위 를 변경할 수 있어서 다양한 분야에서 FSR로 구현되는 촉각 센 서 패드의 readout 회로로 사용될 수 있다.
감사의 글
이 논문은 2016학년도 안동대학교 연구비에 의하여 연구 되었음.
REFERENCES