CopyrightⒸ2013 KSAE / 123-11 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2013.21.3.088 Transactions of KSAE, Vol. 21, No. 3, pp.88-97 (2013)
QFT 기법을 이용한 승용디젤엔진 공연비 제어 알고리즘 설계 연구
박 인 석
1)․홍 승 우
2)․신 재 욱
2)․선 우 명 호
*3)한양대학교 자동차전자제어연구소
1)․한양대학교 자동차공학과
2)․한양대학교 미래자동차공학과
3)Robust Air-to-fuel Ratio Control Algorithm
of Passenger Car Diesel Engines Using Quantitative Feedback Theory
Inseok Park
1)․Seungwoo Hong
2)․Jaewook Shin
2)․Myoungho Sunwoo
*3)1)ACE Lab, Hanyang University, Seoul 133-791, Korea
2)Department of Automotive Engineering, Graduate School, Hanyang University, Seoul 133-791, Korea
3)Department of Automotive Engineering, Hanyang University, Seoul 133-791, Korea (Received 8 August 2012 / Revised 12 October 2012 / Accepted 9 November 2012)
Abstract : This paper presents a robust air-to-fuel ratio (AFR) control algorithm for managing exhaust gas recirculation (EGR) systems. In order to handle production tolerance, deterioration and parameter-varying characteristics of the EGR system, quantitative feedback theory (QFT) is applied for designing the robust AFR control algorithm. A plant model of EGR system is approximated by the first order transfer function plus time-delay (FOPTD) model. EGR valve position and AFR of exhaust gas are used as input/output variables of the plant model. Through engine experiments, parameter uncertainty of the plant model is identified in a fixed engine operating point. Requirement specifications of robust stability and reference tracking performance are defined and these are fulfilled by the following steps: during loop shaping process, a PID controller is designed by using a nominal loop transmission function represented on Nichols chart. Then, the frequency response of closed-loop transfer function is used for designing a prefilter. It is validated that the proposed QFT-based AFR control algorithm successfully satisfy the requirements through experiments of various engine operating points.
Key words : Passenger car diesel engine(승용디젤엔진), Exhaust gas recirculation(배기가스 재순환), Quantitative feedback theory(정량적 피드백 이론), Air-to-fuel ratio control(공연비 제어), Robust control(강인 제어)
Nomenclature1) Ne : engine speed, [rev/min]
Wf : fuel injection quantity, [mg/str]
pint : pressure of intake manifold, [kPa]
pexh : pressure of exhaust manifold, [kPa]
uEGR : lift position of EGR valve, [%, close]
uVGT : vane position of VGT actuator [%, close]
AFRexh : air-to-fuel ratio of exhaust gas [-]
AFRexh,des : desired air-to-fuel ratio of exhaust gas [-]
*Corresponding author, E-mail: [email protected]
1. 서 론
디젤엔진에 널리 적용되고 있는 배기가스 재순환 (Exhaust gas recirculation, EGR) 시스템은 연소 된 배 기가스를 다시 실린더로 공급함으로써 연소온도를 낮추고 실린더 내부의 산소 비율를 줄이는 역할을 담당한다. 이러한 원리를 이용하여 EGR 시스템은 질소산화물(NOx)의 발생을 효과적으로 줄일 수 있 기 때문에 디젤엔진 제어시스템에 널리 적용되고 있 는 기술이다. 하지만, 과도하게 EGR 가스가 실린더 내로 공급되는 경우 연소가 불안정해지고 입자상 물
QFT 기법을 이용한 승용디젤엔진 공연비 제어 알고리즘 설계 연구
질(Particulate matter, PM)의 발생을 증가시킬 수 있 기 때문에 정밀한 제어가 필수적으로 요구된다.1,2)
EGR 시스템의 강한 비선형성, 시변(Time-varying) 파라미터 특성, 가변 용량 터보차저(Variable geo- metry turbo-charger, VGT)와의 상호 작용들과 같은 요소들로 인하여 제어알고리즘 설계에 많은 어려움 들이 존재한다.3,4) 이러한 어려움들을 극복하기 위 하여 Sliding mode 제어 기법,5,6) Linear parameter varying 모델 기반 H∞ 제어기법,7,8) Model predic- tive9) 제어 기법 등과 같은 다양한 제어 알고리즘 설 계 기법들이 제시 되어 왔다. 하지만, 이러한 제어기 법들은 연산 부하가 커서 구현이 어렵거나 On-line calibration 이 어려워서 실제 차량에 적용하기에는 많은 한계점들이 존재한다.10)
이러한 문제들을 고려하여, 이 연구에서는 Quan- titative feedback theory(QFT) 기법을 이용한 EGR 시 스템의 강인 제어 알고리즘 설계 방법을 제시한다.
제어 인자로는 보편적으로 이용되던 신기 유량 대 신 배기가스의 공연비를 이용함으로써, HFM 센서 와 인젝터 공차 및 노후화에 대해 좀 더 강인하게 대 응할 수 있도록 설정하였으며,11,12) 제어기구조로는 구현이 쉽고 On-line calibration 이 용이한 PID 제어 기를 채택 하였다. 디젤엔진 EGR 시스템의 생산 공 차, 노후화, 운전 환경 변화에 따른 파라미터 불확실 성(Uncertainty)들을 고려한 안정성 및 제어성능은 QFT 기법의 적용을 통해 확보하고자 한다. QFT 기 법은 플랜트의 불확실성을 고려한 강인 제어기 설 계 방법 중 하나로 주파수 응답을 이용한 고전 제어 기법을 기초로 하고 있기 때문에 설계 과정이 쉽고, 정량적 요구사양 충족 여부를 쉽게 평가할 수 있는 장점이 있어 실용적인 제어기 설계 기법으로 평가 받는다.13)
이 논문의 구조는 다음과 같다. 2장에서는 승용디 젤엔진의 EGR 시스템에 대한 분석을 통한 모델링 과 파라미터 분석 과정을 설명한다. 3장에서는 QFT 기법을 이용하여 공연비 제어알고리즘의 PID 제어 기와 Prefilter를 설계하는 방법에 대하여 소개한다.
4장에서는 QFT 기법을 이용하여 설계한 제어기를 엔진동력계 실험을 통하여 성능을 검증하고, 5장에 서는 요약 및 결론과 함께 끝을 맺는다.
2. 시스템 특성 분석
2.1 대상 시스템
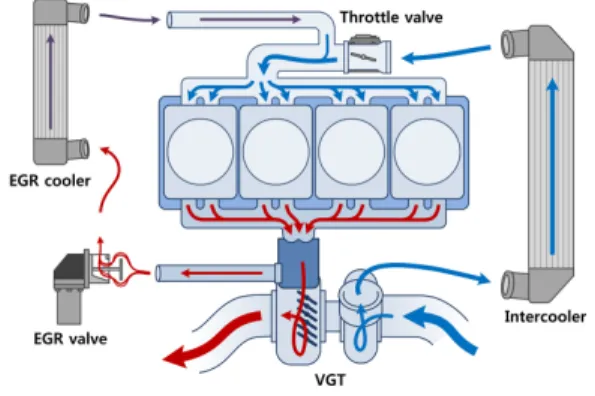
이 연구의 대상 시스템은 커먼레일, EGR, VGT 등의 기술들이 적용되어 있는 2.2 리터 승용디젤엔 진이다. Fig. 1에서 도시하고 있는 바와 같이 엔진의 흡기 및 배기는 전자식 액추에이터들로 제어되는 EGR과 VGT 시스템으로 구성되어 있다. EGR 밸브 의 액추에이터는 DC 모터로 구동되며 밸브의 리프 트를 조절함으로써, 흡기 매니폴드로 유입되는 EGR 가스의 유량을 제어한다. VGT의 경우 터빈의 베인 각도를 전자식 액추에이터를 이용하여 조절 함으로써 컴프레서에 전달되는 터빈 파워를 제어 한다.
Fig. 1 Engine schematic diagram
14)2.2 플랜트 모델 정의 및 파라미터 분석
이 연구에서는 문제의 복잡성을 줄이기 위하여 플랜트 모델을 아래 식 (1)에서 표현한 것과 같이 시 간 지연을 가지는 1차 전달 함수(First-order plus time delay, FOPTD)로 근사화 시켜서 정의하였다. 시스 템의 입력은 EGR 밸브 개도량(uEGR)이고, 출력은 배 기가스로 부터 측정하는 공연비(AFRexh)로 설정하 였다.( ) 1
sTd
G s K e
τs
= ⋅ −
+
where, is a static gain, is a time constant and
dis a time delay
K T
τ (1)
이 연구에서는 고정된 운전 조건(엔진회전속도
Inseok Park․Seungwoo Hong․Jaewook Shin․Myoungho Sunwoo
Fig. 2 Static gain and pressure ratio (p
int/p
exh) contour of N
e= 1750 rpm, W
f= 20 mg/str
(Ne) 1750 rpm과 연료분사량(Wf) 20 mg/str)에서 EGR과 VGT 액추에이터들의 주요 동작 범위 내 이득(K) 을 분석하였다. 플랜트 모델의 이득은 EGR 밸브와 VGT 베인이 닫혀 있는 조건에서 큰 경향을 보이는 것을 Fig. 2를 통해서 확인할 수 있다. 이러한 현상은 배기가스 공연비에 직접적으로 영향을 주는 EGR 가스의 유량이 흡기와 배기 매니폴드의 압력비에 비례하는 특성을 가지기 때문이다.15) VGT 베인 조 건에 따라 선형화 된 플랜트의 이득은 Fig. 3과 같이 도시할 수 있다. 고정된 운전 조건(1750 rpm, 20 mg/str)에서 유효한 VGT 베인의 영역을 85 ~ 95(%) 으로 설정하고, 조건 별로 선형화 시켜서 Table 1에 서 요약하고 있는 것과 같이 플랜트의 이득 파라미 터 불확실성 범위를 0.64 ~ 0.98로 결정하였다.
플랜트 모델 (1)의 시상수(τ)와 시간지연(Td) 파라 미터를 분석하기 위해 VGT의 베인을 85, 90, 95(%) 로 고정시킨 조건에서 EGR 밸브 리프트 위치를 60
~ 100(%) 사이 영역에서 9가지 패턴의 스텝 변화 실 험을 수행하였으며, Table 1에서 요약하고 있는 것 과 같이 시상수와 시간지연 파라미터의 범위와 공 칭(Nominal) 값들을 얻을 수 있었다.
Table 1 Parameter uncertainty specifications
Parameter Minimum Maximum Nominal
K
0.64 0.98 0.98
τ 0.4286 0.5057 0.5057
Td
0.1071 0.24 0.24
Fig. 3 Linearized static gains of N
e= 1750 rpm, W
f= 20 mg/str
3. QFT 기법을 이용한 공연비
제어알고리즘 설계 3.1 QFT 기반 제어기 설계 과정
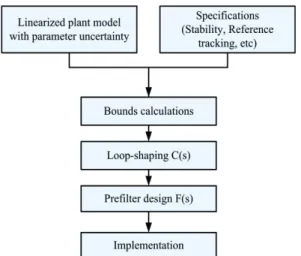
QFT 기법을 이용한 설계 과정은 Fig. 4에서 도시 하고 있는 것과 같이 크게 5 단계로 구성되어 있다.
첫 번째 단계는 선형화 시킨 플랜트 모델의 파라미 터와 불확실성 범위를 정의하고 제어시스템의 요구 사항을 결정하는 과정이다. 두 번째 단계에서는 제 어기 설계에 앞서 첫 번째 단계에서 정량화시킨 플 랜트의 파라미터 불확실성과 제어요구 사양들로부 터 도출되는 경계조건(Bound)들을 Nichols chart에 도시한다. 세 번째 단계는 Loop shaping 과정으로,
Robust Air-to-fuel Ratio Control Algorithm of Passenger Car Diesel Engines Using Quantitative Feedback Theory
Fig. 4 Design process of quantitative feedback theory
Fig. 5 Diagram of AFR control system
Nichols chart에 표시된 각종 경계조건들을 만족 시 키는 제어기를 설계하는 과정이다. 이 단계를 통해 Fig. 5의 C(s)로 표현되는 제어기 설계 결과를 얻을 수 있다. 다음 단계는 Prefilter 인 F(s) 설계 단계이며, 폐루프 주파수 응답을 설계 사양에 맞추는 과정이 다. 마지막 단계는 앞서 설계한 C(s)와 F(s)를 구현하 는 단계이다. 이 연구에서는 MATLAB 기반의 QFT 설계 도구인 QFT control toolbox(QFTCT)를 각각의 설계 단계에 활용하였다.16)
3.2 주파수 영역 설정
QFT 기반의 설계 기법은 주파수 응답을 기초로 하 고 있기 때문에 플랜트의 주요 동작 주파수를 분석하 는 작업이 필요하다. 이 연구에서는 양산 디젤엔진 제어시스템을 이용한 New european driving cycle (NEDC) 실험을 통해 배기가스의 공연비 주파수 응 답을 분석하였다. 약 1Hz 이하의 주파수에서 대부분 의 에너지가 집중되어 있는 것을 확인할 수 있었으며, 이 연구에서는 최대 2Hz 까지 주파수 영역을 아래 식 (2)와 같이 정의하였다. 식 (2)의 8개 이산 주파수들은 경계조건, Loop shaping 과 같은 QFT 설계 과정에서 주파수 응답을 계산할 때 기준 주파수로 사용된다.
[ ]
[ 1 2 3 4 5 6 7 8 ]
2
2 0.01 0.05 0.1 0.2 0.4 0.5 1 2
f f f f f f f f
ω π π
=
= (2)
3.3 Pseudo-continuous time 플랜트 모델 및
템플릿 분석제어기 구현과정에서 이산화에 의한 영향을 미리 설계 과정에서 고려하기 위하여, Sampling과 Zero- order hold의 특성을 연속 시간 도메인에서 근사화 시키는 Pseudo-continuous time (PCT) 기법을 이용하 여, 아래 식 (3)에서 정의한 PCT 전달함수를 이용하 여 플랜트 모델을 확장하였다.17,18)
( ) 2
2
, where issampling period
PCT s s
G s T s T
= + (3)
Table 1에서 요약하고 있는 플랜트 모델의 파라미 터들은 불확실성 범위 내에서 균일하게 분포하고 있다는 가정 하에, 플랜트의 템플릿(Template)을 Fig. 6의 Nichols chart 에 도시하였다. 템플릿은 파라 미터 변동에 따른 플랜트 주파수 응답의 집합을 나 타내는 것이며, Fig. 6의 공칭 플랜트 주파수 응답 (G0)이 템플릿 내의 다른 주파수 응답들에 비해 상 대적으로 Critical point (0 dB, -180 deg)에 근접한 것 으로 보아 Table 1에서 정의한 파라미터의 공칭 값 들이 적절하게 설정 되었음을 알 수 있다.
Fig. 6 Plant templates on nichols chart
박인석․홍승우․신재욱․선우명호
3.4 제어기 사양 설계
3.4.1 강인 안정성(Robust stability) 사양
강인 안정성은 아래 식 (4)에서 정의하고 있는 바 와 같이 Complementary sensitivity 전달 함수의 전체 주파수 영역에 대한 Peak 응답(Mp)을 기준으로 설계 한다. 이 연구에서는 허용 Overshoot을 고려하여 1.1 로 설계하였으며, 이는 양산 디젤엔진제어시스템의 응답성능 분석을 통하여 결정하였다.
( ) ( )
( ) ( ) , [0, )
1 p
G j C j G j C j M
ω ω
ω ω ≤ ∀ ∈ω ∞ +
where,Mpis a peak responsein magnitude
(4)
이와 같은 강인 안정성 사양은 식 (5)에서 설명하 고 있는 Maximum peak criteria19)에 의해 5.61 dB의 Gain margin(GM)과 54.07 deg의 Phase margin(PM)을 의미하는 것을 알 수 있다.
1 1 1
20log 1 , 2sin
p 2 p
GM PM
M M
⎛ ⎞ − ⎛ ⎞
= ⎜⎜⎝ + ⎟⎟⎠ = ⎜⎜⎝ ⋅ ⎟⎟⎠ (5)
3.4.2 강인 추종 성능(Robust tracking performance)
사양
목표 값 추종 성능에 대한 사양은 상한 및 하한 경 계 조건으로 구성되어 있으며, 상한 경계 조건은 식 (4)의 peak 응답과 같은 10%의 Overshoot 으로 설정 하였으며, 0.6초의 상승시간(Rising time)을 가지도 록 설계 하였다. 하한 조건은 0.25초의 시간지연과 2.2초의 상승 시간을 가지도록 설계 되었다. 식 (6) 과 식 (7)은 각각 목표 값 추종성능의 상한 및 하한 경계조건들을 전달함수로 표현하고 있으며,20) Fig. 7 에서 각각의 시간 응답을 도시하고 있다. 강인안정 성 사양과 마찬가지로 양산 디젤엔진 제어시스템의 응답성능을 다양한 운전조건에서 분석을 통하여 선 정하였다.
2
0.5723 11.45 4 11.45
RU
T s
s s
= +
+ +
(6)0.25
3 2
94.81
33.2 99.16 94.81
L
s
TR e
s s s
= ⋅
−+ + +
(7)Fig. 7 The time responses of reference tracking bounds
3.5 Loop shaping
이 연구에서는 식 (8)에서 정의하고 있는 것과 같 이 제어기 구조를 PID로 결정하였으며, 제어기 이득 값 들은 Loop shaping 과정을 통해 설계한다.
( )
p Ki dC s K K s
= +
s+
(8)QFT 기법에서의 Loop shaping 은 Nichols chart에 도시한 식 (4), (6), (7)의 강인 안정성 및 제어성능 사 양들의 경계조건(Bound) 들을 침범하지 않는 제어 기의 이득 값 들을 설계하는 과정이다. 이 연구에서 는 QFTCT toolbox를 이용하여 설계하였으며, 아래 식 (9)와 같은 설계 결과를 얻을 수 있었다.
( ) 1.426 3 0.1272
C s s
= + +s (9)
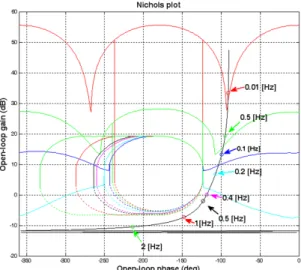
Fig. 8은 Loop shaping 의 결과로, 식 (2)에서 정의 한 주파수 별로 강인 안정성과 추종 성능에 대한 경 계조건들을 공칭 파라미터를 갖는 제어시스템의 개 루프 주파수 응답(L0)이 침범하지 않도록 설계된 것 을 확인할 수 있다.
3.6 Prefilter design
Prefilter 설계는 제어시스템의 폐루프 주파수 응 답(T)을 이용하여 식 (6), (7)에서 정의한 사양을 충 족시키기 위한 단계이다. Fig. 9에서는 식 (10)의 Prefilter 설계 결과를 도시하고 있는 Bode 선도로써, 제어시스템의 폐루프 주파수 응답의 최대, 최소 값 (Tmax, Tmin) 들은 식 (6), (7)의 경계조건을 만족시켰다.
QFT 기법을 이용한 승용디젤엔진 공연비 제어 알고리즘 설계 연구
Fig. 10 Diagram of engine experiment environment Fig. 8 Loop shaping results on nichols chart
Fig. 9 Prefilter design results
( ) 3 2
0.2738 1
0.01236 0.1373 0.6197 1 F s s
s s s
= +
+ + + (10)
4. 실험 검증
이 연구에서 제시한 제어 알고리즘은 연구용으로 개발한 소프트웨어 플랫폼(AUTOSAR-Lite)을 이용 하여 개발하였으며,21,22) 32-bit 프로세서를 내장한 엔진제어시스템(Engine management system, EMS) 하드웨어 플랫폼에 탑재하여 실험하였다.
4.1 실험 환경
실험 검증에 사용한 대상 엔진은 2.2L 승용 디젤 엔진이며, Photo. 1에서 도시하고 있는 동력계 환경 에서 수행하였다. 실험환경은 Fig. 10에서 도식화 하 여 보여주고 있는 것과 같이, 대상엔진의 회전속도 와 부하와 같은 시험 조건들을 제어할 수 있는 동력
Photo. 1 Picture of engine experiment environment
Inseok Park․Seungwoo Hong․Jaewook Shin․Myoungho Sunwoo
계 제어시스템과 EMS 내부의 연산결과들을 실시간 으로 측정하고 보정하기 위한 표준 보정 프로토콜 기반 인터페이스 장비와 소프트웨어들로 구성되어 있다.
4.2 실험 결과
4.2.1 목표 값 추종성능 실험 결과
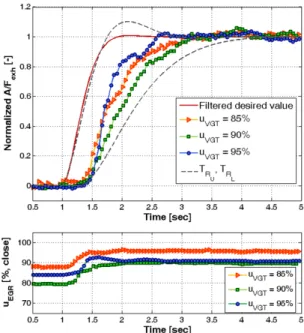
엔진의 회전속도(Ne)를 1750rpm, 연료분사량(Wf) 을 20 mg/str 로 고정시킨 후, 목표 공연비 값의 추종 성능을 평가함으로써 QFT 기법을 이용하여 설계한 제어기의 성능을 검증하였다. Fig. 11에서는 VGT 베인을 각각 85, 90, 95%로 고정시킨 조건에서 배기 가스 공연비의 목표 값을 스텝으로 변화 시킨 실험 결과들을 도시하고 있다. 목표 값과 측정된 공연비 값을 정규화 시켜서 Fig. 11에 표시하였으며, 실험 결과에서 확인할 수 있듯이 식 (6), (7)에서 정의한 경계조건을 만족시키는 제어성능들을 확인할 수 있 었다.
Fig. 11 The experimental results of reference tracking
4.2.2 주변 운전조건 실험 결과
QFT 기법을 이용하여 설계한 제어기가 주변 운 전 조건에서도 안정적인 제어성능을 보일 수 있는 지 확인하기 위하여, 제어기의 이득 값을 고정시킨
Fig. 12 The experimental results of vicinity operating points with fixed controller gains
채 설계 운전조건(Ne: 1750 rpm, Wf: 20 mg/str)에서 벗어난 경우의 제어 성능을 실험을 통해 확인하였 다. Fig. 12는 엔진회전속도, 연료분사량의 변화, 공 연비 제어 성능, EGR 밸브 리프트 결과들에 대해 도 시하고 있는 것으로 설계 된 운전조건에서 벗어난 경우에도 안정적으로 목표 값을 추종하는 제어성능 을 보여주었다.
4.2.3 운전조건 확장 실험 결과
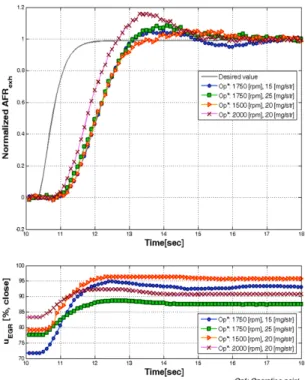
운전영역을 확장시켜 다른 운전조건에서도 앞서 소개한 설계 기법이 적용 가능한지를 검증하기 위 하여 처음 설계한 운전조건인 엔진회전속도 1750rpm, 연료분사량 20mg/str 기준으로 250 rpm과 5 mg/str 씩 편차를 준 4가지 운전조건에서 같은 설계 과정을 반복하였다. Table 2는 제어기 설계에 사용된 운전 조건 별 플랜트 모델의 파라미터 불확실성 범위와 공칭 값들을 요약하고 있다. 각각의 운전조건에서 얻은 모델 파라미터들을 고려하여 제어기 사양, Loop shaping, prefilter 설계 과정들을 거쳐 Table 3에 서 요약하고 있는 것과 같이 제어기를 설계하였다.
Fig. 13은 4가지 운전조건에서 목표 공연비 값의 추종성능 실험 결과를 도시하고 있는 것으로, QFT 기법을 이용하여 설계한 제어기들이 각각 운전조건 들에서도 만족할 만한 결과를 보임을 확인할 수 있 었다.
Robust Air-to-fuel Ratio Control Algorithm of Passenger Car Diesel Engines Using Quantitative Feedback Theory
Table 2 Parameter of the additional operating points Operating point
(N
e, W
f)
Para
meter Value range (Nominal) 1750 rpm,
15 mg/str
K
0.33 ~ 0.74 (0.63) τ 0.4286 ~ 0.4629 (0.4629)
Td0.1557 ~ 0.2529 (0.2529) 1750 rpm,
25 mg/str
K
0.17 ~ 0.56 (0.44) τ 0.45 ~ 0.5529 (0.5529)
Td0.1914 ~ 0.2443 (0.2443) 1500 rpm,
20 mg/str
K
0.21 ~ 0.53 (0.45) τ 0.4457 ~ 0.5571 (0.5571)
Td0.1643 ~ 0.2386 (0.2386) 2000 rpm,
20 mg/str
K
0.28 ~ 0.71 (0.61) τ 0.4614 ~ 0.5171 (0.5171)
Td0.2257 ~ 0.3343 (0.3343)
Table 3 Controller gains of the additional operating points Operating point
(N
e, W
f)
Controller gains
Kp Ki Kd
1750rpm, 15mg/str 1.15 3 0.188
1750rpm, 25mg/str 2.12 4.5 0.257
1500rpm, 20mg/str 2.1 3 0.234
2000rpm, 20mg/str 1.74 3 0.17
5. 결 론
이 연구에서는 승용디젤엔진의 배기가스 재순환 시스템을 위한 강인 공연비 제어 알고리즘 설계 방 법을 제시하였다. QFT 기법을 이용하여 선형화 된 플랜트 모델의 파라미터 불확실성에 대해 강인 안 정성 및 추종 성능을 만족하는 Prefilter와 PID 제어 기를 설계하였다. 다양한 엔진 운전조건에서 설계 한 제어기들을 엔진동력계 실험을 통해 검증함으로 써, 전체 운전영역에서 강인한 성능을 확보할 수 있 는 제어기 설계가 가능함을 보였다.
이 연구에서 제시한 공연비 제어기는 산업에서 널리 이용되고 있는 PID 제어기를 채택하였기 때문 에 설계 과정이 복잡하고 On-line calibration 어려웠 던 기존 연구(예: Sliding mode, H∞, Model predictive 기반의 제어기 설계 기법) 들에 비하여 실제 차량에 적용이 가능한 장점이 있다. 또한, QFT 기법을 통해 제어기의 초기 설계가 Offline 에서 빠르게 이루어 질 수 있기 때문에 개발 비용 및 시간을 크게 줄일 수 있다.
Fig. 13 The experimental results of additional operating points
후 기
이 연구는 지식경제부와 한국산업기술재단의 전 략기술인력양성사업과 지식경제부 산업원천기술 개발 사업의 일환으로 수행된 연구결과(No. 10039673, No. 10042633)이며, 2011년도 교육과학기술부의 재 원으로 한국연구재단의 지원을 받아 수행된 연구이 다(No. 2011-0017495). 또한 지식 경제부 에너지자 원기술개발사업의 일환(2006ETR11P091C)으로 수 행되었다.
References
1) Y. Y. Wang, I. Haskara and O. Yaniv, “Quan- titative Feedback Design of Air and Boost Pressure Control System for Turbocharged Diesel Engines,” Control Engineering Practice, Vol.19, pp.626-637, 2011.
2) S. J. Jeong, J. W. Chung, J. H. Kang and W.
Kang, “The Effect of Control of the VGT and
EGR in a Turbocharged Common-rail Diesel
Engine on Emissions under Partial Loads
박인석․홍승우․신재욱․선우명호
Conditions,” Transactions of KSAE, Vol.15, No.6, pp.151-158, 2007.
3) M. Jankovic and I. Kolmanovsky, “Constructive Lyapunov Control Design for Turbocharged Diesel Engines,” Control Systems Technology, IEEE Transactions on, Vol.8, pp.288-299, 2000.
4) J. Chauvin, G. Corde, N. Petit and P. Rouchon,
“Motion Planning for Experimental Airpath Control of a Diesel Homogeneous Charge-com- pression Ignition Engine,” Control Engineering Practice, Vol.16, pp.1081-1091, 2008.
5) V. L. Utkin, C. Hao-Chi, I. Kolmanovsky and J. A. Cook, “Sliding Mode Control for Variable Geometry Turbocharged Diesel Engines,”
American Control Conference Proceedings, Vol.1, pp.584-588, 2000.
6) Y. Yoon, S. Choi, M. Ko and J. Lim, “Simpli- fied Turbocharged Diesel Engine Air Path Modeling and Control Using Sliding Mode Controllers,” KSAE Annual Conference Pro- ceedings, pp.548- 558, 2010.
7) W. Xiukun and L. del Re, “Gain Scheduled Hinf Control for Air Path Systems of Diesel Engines Using LPV Techniques,” Control Sys- tems Technology, IEEE Transactions on, Vol.15, pp.406-415, 2007.
8) M. Jung, “Mean-value Modelling and Robust Control of the Airpath of a Turbocharged Diesel Engine,” Ph. D. Dissertation, University of Cambridge, Cambridge, 2003.
9) P. Ortner and L. del Re, “Predictive Control of a Diesel Engine Air Path,” Control Systems Technology, IEEE Transactions on, Vol.15, pp.449-456, 2007.
10) M. Ammann, N. P. Fekete, L. Guzzella and A.
Glattfelder, “Model-based Control of the VGT and EGR in a Turbocharged Common-rail Diesel Engine: Theory and Passenger Car Implementation,” SAE Transactions, Vol.112, pp.527-538, 2003.
11) E. Alfieri, A. Amstutz, C. H. Onder and L.
Guzzella, “Model-based Feedback Control of the Air-to-fuel Ratio in Diesel Engines Based
on an Empirical Model,” Computer Aided Con- trol System Design, IEEE International Confer- ence on Control Applications, IEEE Interna- tional Symposium on Intelligent Control, IEEE, pp.509-514, 2006.
12) E. Alfieri, “Emissions-controlled Diesel Engine,”
Ph. D. Dissertation, Swiss Federal Institute of Technology Zurich, Zurich, 2009.
13) N. Niksefat and N. Sepehri, “Designing Robust Force Control of Hydraulic Actuators Despite System and Environmental Uncertainties,” Con- trol Systems, IEEE, Vol.21, pp.66-77, 2001.
14) L. Eriksson, J. Wahlström and M. Klein, Phy- sical Modeling of Turbocharged Engines and Parameter Identification Automotive Model Predictive Control, Springer Berlin, Berlin, Vol.402, pp.53-71, 2010.
15) J. Wahlström, “Control of EGR and VGT for Emission Control and Pumping Work Minimi- zation in Diesel Engines,” Ph. D. Dissertation, Linköping University, Linköping, 2006.
16) M. Garcia-Sanz, A. Mauch and C. Philippe, QFT Control Toolbox: An Interactive Object- oriented Matlab CAD Tool for Quantitative Feedback Theory, http://cesc.case.edu/OurQFTCT.
htm, 2012.
17) C. H. Houpis, “Refined Design Method for Sampled-data Control Systems: The Pseudo- continuous-time (PCT) Control System Design,”
Control Theory and Applications, IEE Procee- dings D, Vol.132, pp.69-74, 1985.
18) C. H. Houpis, S. J. Rasmussen and M. Garcia- Sanz, Quantitative Feedback Theory: Funda- mentals and Applications, CRC Press, USA, Vol.20, 2006.
19) S. Skogestad and I. Postlethwaite, Multivari- able Feedback Control: Analysis and Design, Wiley, New York, 1996.
20) J. J. D'Azzo, C. H. Houpis and S. N. Sheldon, Linear Control System Analysis and Design With Matlab, Marcel Dekker, New York, 2003.
21) K. Lee, I. Park, M. Sunwoo and W. Lee,
“AUTOSAR-ready Light Software Architec-
QFT 기법을 이용한 승용디젤엔진 공연비 제어 알고리즘 설계 연구