제 15권 제 4 호 2010년 8월 pp. 279-288
이산 사건/이산 시간 혼합형 시뮬레이션 모델 구조 기반 DEVS-HLA 인터페이스를 이용한 잠수함의 잠항 시뮬레이션
차주환*, 하솔**, 노명일***, 이규열****
Submarine Diving Simulation Using a DEVS-HLA Interface based on the Combined Discrete Event and Discrete Time
Simulation Model Architecture
Ju-Hwan Cha*, Sol Ha**, Myung-Il Roh*** and Kyu-Yeul Lee****
ABSTRACT
In this paper, a DEVS(Discrete EVent Systems Specification)-HLA(High Level Architecture) inter- face was developed in order to perform the simulation using the combined discrete event and discrete time simulation model architecture in a distributed environment. The developed interface connects the combined simulation model with the HLA/RTI(Run-Time Infrastructure) which is an international stan- dard middleware for distributed simulation. The interface consists of an interface model, a model inter- preter, and a distributed environment interpreter. The interface model was defined by using the combined simulation architecture in order to easily connect the existing combined simulation model without modification with the HLA/RTI. The model interpreter takes charge of data transmission between the interface model and the combined simulation model. The distributed environment inter- preter takes charge of data transmission between the interface model and the HLA/RTI. To evaluate the applicability of the developed interface, it was applied to the diving simulation of a submarine in a dis- tributed environment. The result shows that a simulation result in a distributed environment using the interface is the same to the result in a single computing environment.
Key words :Simulation, DEVS-HLA, Discrete event, Discrete time, Simulation model architecture, Submarine
1. 서 론
분산시뮬레이션은하나의시뮬레이션을여러대의 컴퓨터로나누어동시에수행하는시뮬레이션을일컫 는말이다. 분산시뮬레이션을구현하려면네트워크
통신을통한 ‘메시지전달’, 분산된시뮬레이션모듈
간의시뮬레이션시간진행순서를유지하는 ‘시간동
기화’ 기법등을고려하여야한다.
서로분리된시뮬레이션간에상호운용이가능하 려면서로간의정보전달과자료구조등에관한규 약또는표준이필요하다. 이를위해미국국방성산 하기관 DMSO(Defense Modeling and Simulation Office)에서 제시한 표준 사양이 HLA(High Level Architecture)이며, HLA는 RTI(Run-Time Infrastructure)
라는분산시뮬레이션미들웨어(middleware)를사용
한다.
한편, 이산사건/이산시간혼합형시뮬레이션모델
구조를이용한시뮬레이션은한대의컴퓨터를이용 한단일시뮬레이션에최적화되어있다. 그러나분산 환경에서의시뮬레이션과여러시뮬레이션을동시수 행하고연동하기에는어려움이있다.
본논문에서는시뮬레이션모델을분산시뮬레이션 미들웨어인 HLA/RTI와쉽게연동할수있는 DEVS- *정회원, 서울대학교공학연구소
**학생회원, 서울대학교조선해양공학과
***교신저자, 정회원, 울산대학교조선해양공학부및
WCU(World Class University) 사업단
****종신회원, 서울대학교조선해양공학과
-논문투고일: 2009. 12. 26 -논문수정일: 2010. 06. 17 -심사완료일: 2010. 06. 18
HLA 인터페이스(interface)를개발하였다. 본논문에
서개발한 DEVS-HLA 인터페이스는인터페이스모
델, 모델번역기, 분산환경번역기로구성된다. 인터 페이스모델을혼합형시뮬레이션모델구조로정의 함으로써혼합형시뮬레이션모델과 HLA/RTI 간의 연결과정을마치혼합형시뮬레이션모델간의단일 시뮬레이션과정과유사하게진행할수있다. 모델번 역기는인터페이스모델과시뮬레이션모델간의데 이터전송을담당하며, 분산환경번역기는인터페이
스모델과 HLA/RTI 간의데이터전송을담당한다.
본논문의 2장에서는 HLA와 RTI에대해간단히 소개하고, 혼합형시뮬레이션모델구조에대해언급 한다. 3장에서는본논문에서개발한혼합형시뮬레
이션모델기반 DEVS-HLA 인터페이스의구조와사
용방법에대해설명한다. 4장에서는개발한 DEVS-
HLA 인터페이스의기능검증을위해수행한분산환
경에서의잠수함잠항시뮬레이션에대해설명한다.
마지막으로 5장에서는결론및향후연구계획을기
술한다.
2. 분산 시뮬레이션의 개요
분산시뮬레이션환경의가장중요한배경이되는 것은국제표준인 HLA와분산시뮬레이션미들웨어 가되는 RTI이다. 또한시뮬레이션을수행하기위해 모델링과정에사용되는혼합형시뮬레이션모델구 조를필요로한다.
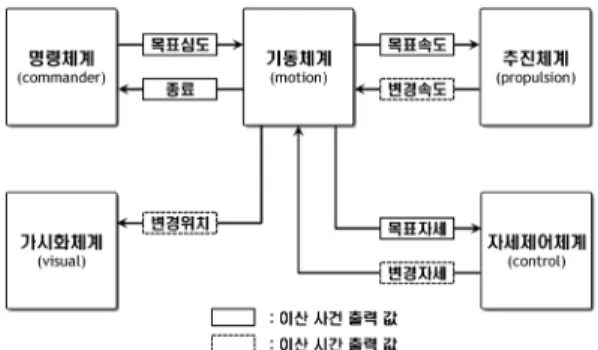
2.1 이산사건/이산시간혼합형시뮬레이션모델 이산사건/이산시간혼합형시뮬레이션은사건에 따라모델의상태를변경시키면서시뮬레이션을진행 하며, 모델이특정상태일때는단위시간마다상태 변수를계산하여시뮬레이션을진행하는방법이다[3].
방경운[1]과차주환등[2]은이산사건및이산시간혼
합형시뮬레이션커널을개발하였다. 기존의이산사
건시뮬레이션모델에이산시간모델을정의할수있
는부분을 Fig. 1과같이추가하여혼합형모델을개
발하였다. Table 1은 Fig. 1에서표현된이산사건/이
산시간혼합형시뮬레이션모델의구성요소를나타 낸다.
이산사건/이산시간혼합형시뮬레이션모델구조 는단일컴퓨터에서수행하는시뮬레이션에최적화 되어있기때문에, 분산환경에서의시뮬레이션을수 행할수없다. 따라서분산환경에서의시뮬레이션을 위해서는국제표준의 HLA와분산시뮬레이션미들 웨어 RTI를필요로한다.
2.2 HLA(High Level Architecture)
HLA는 분산 시뮬레이션을 위한 전체적인 구조
(architecture)의정의, 즉일종의명세이다. 통일된분 산시뮬레이션 시스템을구축하기위해서는독립된 시뮬레이션모듈간의자료구조형식의표준화가필 요하고, 시뮬레이션모듈을서로연결시켜주는미들
웨어가제공해야할기능에대한정의가필요하다. 그
리고시뮬레이션모듈들이지켜야하는최소한의규
칙이필요한데, HLA는바로이러한필수적인요소들
에대한구체적인명세(specification)로서존재한다. HLA는분산시뮬레이션을통한이기종시뮬레이션 간의상호운용성, 시뮬레이션의확장성, 재사용성을
제공하기위하여미국방성산하기관 DMSO에서만
들어졌으며, 이후 SISO(Simulation Interoperability Standards Organization)로 이관하여 IEEE 표준으로 채택되었다[4-8].
Fig. 1. Combined discrete event and discrete time simulation model architecture – ‘Atomic Model’[1,2].
Table 1.Components of the combined discrete event and discrete time simulation model[1,2]
기호 종류 이름
Sdevs 이산 사건 상태 변수 Xdevs 이산 사건 입력 사건 Ydevs 이산 사건 출력 사건
δext 이산 사건 외부 변경 함수 δint 이산 사건 내부 변경 함수
ta 이산 사건 시간 진행 함수 λdevs 이산 사건 출력 함수 Sdtss 이산 시간 상태 변수 f 이산 시간 피적분 함수
이산 시간 적분 함수 λdtss 이산 시간 출력 함수
Cint 이산 시간 상한/하한값 정의 함수
∫f
2.3 RTI(Run-Time Infrastructure)
RTI란 HLA에서 정의하고 있는 인터페이스 명세 (interface specification)의 구현 결과물로서, 시뮬레이 션 시스템에게 공동의 서비스를 제공하기 위한 Library이다. RTI는 분산 환경에서 주고받는 메시지 관리와 전달, 시간 동기화 기능을 담당한다[4-8].
3. 이산 사건/이산 시간 혼합형 시뮬레이션 모델 구조 기반 DEVS-HLA
인터페이스 개발
본 논문에서는 이산 사건/이산 시간 혼합형 시뮬레 이션 모델과 HLA/RTI를 연동하기 위해 DEVS-HLA 인터페이스를 개발하였다. 개발한 DEVS-HLA 인터 페이스는 다음과 같은 주요 특징을 가진다.
① 이산 사건, 이산 시간 구분 없이 동시 사용 가능
② 시뮬레이션 모델의 변경 없이 사용 가능
③ 시뮬레이션 모델의 재컴파일 없이 사용 가능
특히 혼합형 시뮬레이션 모델의 변경 없이 HLA/
RTI와 연동하기 위해 DEVS-HLA 인터페이스를 혼합 형 시뮬레이션 모델 구조로 정의함으로써 마치 혼합 형 시뮬레이션 모델이 또 다른 혼합형 시뮬레이션 모 델과 데이터를 주고 받는 것처럼 구성하였다.
3.1 DEVS-HLA 인터페이스의 구조
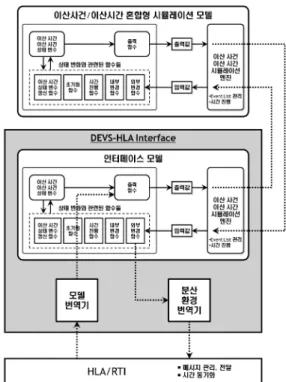
DEVS-HLA 인터페이스는 Fig. 2와 같이 1개의 인 터페이스 모델과 2개의 번역기로 구성된다. 인터페이 스 모델은 이산 사건/이산 시간 혼합형 시뮬레이션 모 델 구조와 동일한 형태로 구성하였다. 2개의 번역기 는 HLA/RTI와의 통신을 담당한다.
3.1.1 인터페이스 모델
인터페이스 모델은 이산 사건/이산 시간 혼합형 시 뮬레이션 모델 구조의 형태를 그대로 사용한다. 시뮬 레이션 모델은 DEVS-HLA 인터페이스와 데이터를 교환할 때 DEVS-HLA 인터페이스 내부의 인터페이 스 모델을 이용하여 마치 다른 혼합형 시뮬레이션 모 델과 데이터를 주고 받는 것과 동일하게 데이터를 교 환한다. 따라서 HLA/RTI와의 통신을 위해 시뮬레이 션 모델 구조를 변경하거나 프로그램을 재컴파일하는 과정 없이 사용 가능하다.
3.1.2 모델 번역기
모델 번역기에서는 HLA/RTI 함수를 그에 해당하는
이산 사건/이산 시간 혼합형 시뮬레이션 모델 구조의 함수로 번역하여 인터페이스 모델로 전달하는 역할을 한다. HLA/RTI에서 전달 받은 HLA/RTI 함수는 모 델 번역기에 의해 인터페이스 모델의 출력 함수로 데 이터를 전달된다.
3.1.3 분산 환경 번역기
분산 환경 번역기에서는 이산 사건/이산 시간 혼합 형 시뮬레이션 모델 구조의 함수를 그에 해당하는 HLA/RTI 함수로 번역하여 HLA/RTI로 넘겨주는 역 할을 한다. 분산 환경 번역기는 인터페이스 모델 내부 의 외부 변경 함수에서 출력되는 데이터를 HLA/RTI 함수로 번역하여 HLA/RTI로 전달한다.
3.2 DEVS-HLA 인터페이스를 이용한 시뮬레이션 모델 간의 데이터 전달 과정
DEVS-HLA 인터페이스를 이용한 혼합형 시뮬레이 션 모델 간의 데이터 전달 과정은 다음의 2가지 과정 으로 나눌 수 있다.
① 시뮬레이션 모델에서 HLA/RTI로의 데이터 전달 과정: 시뮬레이션 모델 → 인터페이스 모델 → 분산 환경 번역기 → HLA/RTI
Fig. 2. Configuration of the developed DEVS-HLA interface.
② HLA/RTI에서시뮬레이션모델로의데이터전달
과정: HLA/RTI →모델번역기→인터페이스
모델→시뮬레이션모델
DEVS-HLA 인터페이스를이용한시뮬레이션모델
간의데이터전달과정의예로 2개의시뮬레이션모 델이 DEVS-HLA 인터페이스와 HLA/RTI를이용하 여데이터교환을하는과정을설명한다(Fig. 3 참조).
‘Model 1’에서는 이산 사건/이산 시간 데이터
‘Command’를 HLA/RTI를이용하여 ‘Model 2’로전 달한다.
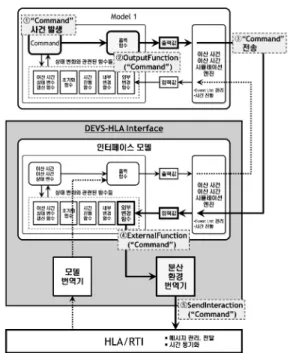
3.2.1 시뮬레이션 모델 ‘Model 1’에서 HLA/RTI로의 데이터 전달 과정
DEVS-HLA 인터페이스를이용하여시뮬레이션모
델 ‘Model 1’에서 HLA/RTI로의데이터전달과정은 다음과같다.
① ‘Model 1’에서 ‘Command’라는이산사건/이산 시간데이터가발생한다(Fig. 4의①).
② ‘Model 1’에서는 OutputFunction(“Command”)
라는출력함수를이용하여발생한 ‘Command’
을 ‘Model 1’의시뮬레이션엔진으로전달한다
(Fig. 4의②).
③ ‘Model 1’의시뮬레이션엔진은인터페이스모
델의시뮬레이션엔진으로 ‘Command’를전달
한다. 인터페이스모델의시뮬레이션엔진은전
달받은 ‘Command’를인터페이스모델의외부
변경함수로입력한다(Fig. 4의③).
④ 인터페이스모델은 ExternalFunction(“Command”)
라는외부변경함수를이용하여분산환경번 역기로이산사건을전달한다(Fig. 4의④).
⑤ 분산환경번역기는인터페이스모델의외부변 경 함수로부터 전달받은 ExternalFunction
(“Command”)를 RTI 함수인 SendInteraction (“Command”)로번역하여 HLA/RTI로전달한다
(Fig. 4의⑤).
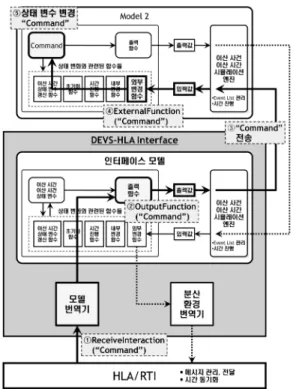
3.2.2 HLA/RTI에서 시뮬레이션 모델 ‘Model 2’로의 데이터 전달과정
DEVS-HLA 인터페이스를이용하여 HLA/RTI에서
시뮬레이션모델 ‘Model 2’로의데이터전달과정은 다음과같다.
① ReceiveInteraction(“Command”)이라는 RTI 함
수를 이용하여 HLA/RTI에서 모델 번역기로
‘Command’를전달한다(Fig. 5의①).
② 모델번역기에서는전달받은 RTI 함수를혼합형 시뮬레이션 모델 구조의 출력 함수 형태인
OutputFunction(“Command”)으로 번역하여인
터페이스모델로전달한다. 인터페이스모델은
모델번역기로부터전달받은사건 ‘Command’
를출력함수를이용하여인터페이스모델의시 뮬레이션엔진으로전달한다(Fig. 5의②).
③ 인터페이스모델의시뮬레이션엔진은 ‘Model 2’의시뮬레이션엔진으로 ‘Command’를전달 한다. ‘Model 2’의시뮬레이션엔진은전달받 은 ‘Command’를 ‘Model 2’의외부변경함수 로입력한다(Fig. 5의③).
Fig. 3. Data transmission between simulation models
using the developed DEVS-HLA interface. Fig. 4. Data transmission from ‘Model 1’ to HLA/RTI using the developed DEVS-HLA interface.
④ ‘Model 2’의 외부 변경 함수는 입력 받은
‘Command’를이용하여상태변수를 ‘Command’
상태로변경한다(Fig. 5의④, ⑤).
3.1절과 3.2절에서설명한 DEVS-HLA 인터페이스
의구조와데이터전달과정을바탕으로 DEVS-HLA
인터페이스를개발하였다. 개발한 DEVS-HLA 인터 페이스를혼합형시뮬레이션모델에연결하여사용하 는방법은다음과같다.
3.3 DEVS-HLA인터페이스의사용방법
DEVS-HLA 인터페이스의 사용 방법은 Fig. 6과
같다. 단일시뮬레이션에서사용한시뮬레이션모델
을변경하지않고 DEVS-HLA 인터페이스를연결하
여사용할수있다.
① 기존 단일 시뮬레이션에서 사용한 시뮬레이션
모델을 이용하여 모델의 instance를 생성한다
(Fig. 6의①).
②DEVS-HLA 인터페이스의 인스턴스(instance)를 생성하고①에서생성한모델의인스턴스와연 결한다(Fig. 6의②).
③ 시뮬레이션을 시작한다. 시뮬레이션 시작 시에
는다음의정보를 DEVS-HLA 인터페이스에입
력한다(Fig. 6의③).
- 참여하는시뮬레이션의이름
- 시뮬레이션모델속성정보파일(FOM) - 시뮬레이션에참여하는자신의이름
- 시뮬레이션에참여하는모델들의이름
- Input/Output 정의내용
④ 시뮬레이션이 종료되면 ②에서 생성한 DEVS- HLA 인터페이스의인스턴스를삭제한다(Fig. 6
의④).
시뮬레이션에참여하는모델들의이름은텍스트파 일인 ‘population.txt’ 파일을 이용하여 입력한다.
‘population.txt’에는시뮬레이션에참여하는모델의수 와각모델의이름을기재한다(Fig. 7의①참조). 각 모델의 Input/Output 정보는정해진형식에따라 port
파일에기재된다(Fig. 7의②참조).
Fig. 5. Data transmission from HLA/RTI to ‘Model 2’
using the developed DEVS-HLA interface.
Fig. 6. Usage of the developed DEVS-HLA interface.
Fig. 7. Configuration of information on simulation models and input/out of them.
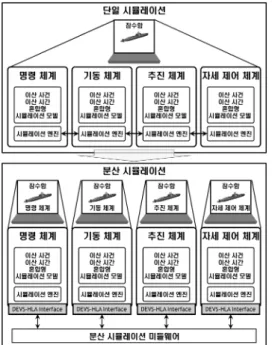
3.4 DEVS-HLA인터페이스를이용한분산시뮬레 이션으로의전환과시뮬레이션모델의추가
DEVS-HLA 인터페이스를사용하면이산 사건/이
산시간혼합형시뮬레이면모델구조를사용한기존
의단일시뮬레이션을분산시뮬레이션으로쉽게전 환할수있다. Fig. 8은잠수함의체계/부체계모델을
이용한단일시뮬레이션을분산시뮬레이션으로전환 하는것을보여준다. 혼합형모델구조를기반으로모 델링한잠수함체계/부체계모델은변경없이 3.3절에
서설명한사용방법을바탕으로 DEVS-HLA 인터페
이스를연결하여분산시뮬레이션으로변경할수있다.
또한 DEVS-HLA 인터페이스를사용하면시뮬레이
션모델의추가도용이하다. Fig. 9에서볼수있듯이
기존의잠수함체계/부체계모델로구성된분산시뮬 레이션에새로운모델인가시화체계모델을추가하 기위해서는혼합형모델구조로가시화체계모델을 모델링하고 DEVS-HLA 인터페이스를 사용하여
HLA/RTI에연결하면된다. 그리고가시화체계모델
을추가함에따라변경되는정보(시뮬레이션모델속
성정의파일(FOM), 시뮬레이션에참여하는모델들
의이름, 모델자신의 Input/Output 정의내용) 등을
수정하면쉽게분산시뮬레이션을수행할수있다. 4. 잠수함 잠항 시나리오의
분산 시뮬레이션
본논문에서는 제안한 DEVS-HLA 인터페이스의 기능을검증하기위해잠수함의잠항시나리오를이 용하여분산시뮬레이션을수행하였고, 이를한대의 컴퓨터에서단일시뮬레이션을수행한결과와비교하 였다.
4.1 잠수함의잠항시나리오
잠수함의잠항시뮬레이션을위한잠항절차는다음 과같은시나리오로진행된다(Fig. 10 참조)[9]. 아래와 같은잠수함의잠항시나리오를바탕으로이산사건/
이산시간혼합형시뮬레이션모델을구성할수있다.
① 디젤 엔진을 정지시키고 전력원을 배터리로 전 환한다.
② 모든공기밸브, 함교의해치(hatch) 등외부공
기가유입되는통로를닫는다.
③ 주밸러스트탱크(main ballast tank), 보상탱크 (compensate tank), 음성 탱크(negative tank),
트림탱크(trim tank) 등의입구(vent)를열어해 수를유입시킨다.
④ 함수미 수평타의 타각을 조절하여 약 6~8도의 트림(trim) 각도를유지한다.
⑤ 중성 부력 상태를 위해 목표 수심에 도달하기 약 15 m 전에음성탱크를비운다.
Fig. 8. Conversion of the stand-alone simulation to the distributed simulation using the developed DEVS- HLA interface.
Fig. 9. Addition of a simulation model using the developed DEVS-HLA interface.
⑥ 주 밸러스트 탱크 내부의 공기 배출을 위해 레 벨링(leveling)을 수행한다.
⑦ 열었던 주 밸러스트 탱크의 입구를 닫는다.
⑧ 보상 탱크를 사용하여 중성 부력 상태를 만들 고, 트림이 없도록 트림 탱크를 조절한다.
⑨ 함수미 수평타의 타각을 조절하여 원하는 심도 까지 잠항한다.
4.2 이산 사건/이산 시간 혼합형 시뮬레이션 모델을 이용한 잠수함의 잠항 시뮬레이션
잠수함은 여러 가지 체계/부체계로 구성된다. 4.1절 에서 설명한 잠수함의 잠항 과정은 이산 사건 시뮬레 이션의 사건으로써 잠수함의 명령 체계에 해당 한다.
각 과정 중에서 이산 시간 시뮬레이션이 필요한 부분 은 실제 잠수함이 수중에서 지정된 경로를 항해하면서 (기동 체계) 함수미의 타각을 조절하고, 탱크에 해수가 유입되어 자세가 바뀌는 과정이다(자세 제어 체계). 따 라서 잠항 절차 중에서 ③~⑤, ⑧, ⑨ 등의 과정은 잠 수함 부체계의 이산 시간 시뮬레이션을 필요로 한다.
함승호 등[10]과 손명조 등[11]은 단일 컴퓨터에서 수 중운동체의 체계 및 부체계 모델로 명령 체계, 기동 체계, 자세 제어 체계, 추진 체계 등의 4가지를 정의 하였다. 명령 체계는 잠수함의 잠항 과정에서 발생하 는 여러 가지 사건(event)을 기반으로 하는 이산 사건 시뮬레이션 모델로 구성할 수 있다. 이와는 다르게 기 동 체계, 추진 체계와 자세 제어 체계는 잠수함의 운 동과 관련되는 미분 방정식으로 표현되므로 매 단위 시간마다 계산을 수행하는 이산 시간 시뮬레이션 모 델로 구성하였다. 기동 체계는 수중 환경에서의 잠수 함의 6자유도 운동을 기반으로 잠수함의 위치와 자세 를 계산하며[12], 추진 체계와 자세 체계는 함수미 수평 타에 의한 자세 제어력과 같은 외력을 계산한다(Fig.
10 참조).
Fig. 11은 단일 컴퓨터에서 작동되는 잠수함의 잠항 시뮬레이션 모델 구성도이다. 이때 가시화 체계는 잠 수함의 잠항 시뮬레이션을 화면 상에 가시화 하기 위 해 추가하였으며, 매 단위 계산 시간마다 잠수함의 위 치와 함수미 수평타의 타각을 기동 체계로부터 전달 받는다.
4.3 잠수함의 6자유도 운동 방정식
잠수함의 6자유도 운동 방정식은 Gertler and Hagen[12] 의 잠수함의 6자유도 조종 운동 방정식을 참 고하였다(Eq. (1)).
(1) 위의 수식은 순서대로 물체 고정 좌표계(body-fixed coordinate)에서 기술된 잠수함의surge, sway, heave, roll, pitch, yaw 운동 방정식이다. 여기에서 u, v, w는 잠수함의 surge, sway, heave의 속도, p, q, r은 잠수 Fig. 10.Submarine diving simulation using a combined
model.
Fig. 11.Configuration of the submarine diving simulation model (a stand-alone simulation).
함의 roll, pitch, yaw의속도이다. m은잠수함의질량, I는잠수함의질량관성모멘트이고, X, Y, Z는잠수함 에작용하는힘, K, M, N은잠수함에작용하는모멘 트이다. 외력성분으로는유체력, 프로펠러에의한추 력, 함미수직타와함수미수평타에의한힘, 중력과 부력등이있는데, 외력도좌변과마찬가지로물체고 정좌표계를따른다. 외력의경우외력에영향을주는 변수(가속도, 속도, 변위)의함수라가정하고, Taylor
series로나타낸다음, 실험적으로 그계수를 구하는
방법을많이사용한다. 그외의상세한사항은 Gertler and Hagen[12]를참고하기바란다.
잠수함의잠항/부상시뮬레이션을위해서는수직면 상의운동만을고려하면된다. 따라서위 6자유도운 동방정식 중에서 surge, heave, pitch운동방정식을 사용한다.
4.4 DEVS-HLA 인터페이스를이용한분산시뮬레 이션4.2절에서구성한단일컴퓨터에서작동되는단일시
뮬레이션과는다르게여기서는분산환경에서작동되 는잠수함잠항시뮬레이션을수행하였다. 4.4절에서 구성한 5개의체계/부체계모델들을 HLA/RTI를통해
정보를교환할수있도록본논문에서개발한 DEVS-
HLA 인터페이스를이용하여연동하였다(Fig. 12 참조).
잠항시나리오는 4.1절에서설명한잠항절차에따 라이산사건시뮬레이션을수행한다. 그중③, ④에 해당하는과정은이산시간시뮬레이션을수행한다.
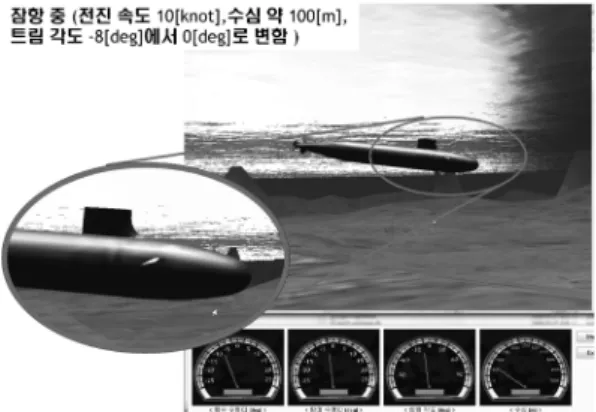
초기에 10 knot로수면(0 m)에서운항중이던잠수함 이주밸러스트탱크(MBT, Main Ballast tank)에해 수가유입되면서트림이발생하고, 수면아래로가라 앉게된다. 또한동시에 6도정도의트림각도를유지 하기위해함수미수평타의각도도변경된다. 본논문
에서는우선 20 m까지잠항을수행후다시 100 m까
지수심을변경하는시뮬레이션을수행하였다.
한편, 잠수함의잠항시뮬레이션과정에서함수미 수평타의각도변화, 잠수함의자세변화등의결과를 가시화되는화면을통해확인할수있다(Fig. 13 참조).
4.5 DEVS-HLA인터페이스를이용한분산시뮬레 이션
잠수함의잠항시뮬레이션을 4.2절에서구성한단 일시뮬레이션모델(Fig. 11 참조)을이용하여한대 의컴퓨터에서시뮬레이션을수행하였다. 또한 4.4절 에서구성한분산시뮬레이션 모델(Fig. 12 참조)를 이용하여다수의컴퓨터를이용한분산환경에서분 산시뮬레이션을수행하였다. 각시뮬레이션에대해 시간의진행에따라변화하는잠수함의수심과트림
각도변화가동일한것을확인할수있었다(Fig. 14
참조). 잠수함의잠항시나리오에따라잠수함이 20 m
Fig. 12.Configuration of submarine diving simulation model using the HLA interface (distributed simulation).
Fig. 13.Change of the position and the attitude of the submarine.
Fig. 14.Comparison of the depth and trim angle of the submarine in the stand-alone simulation (left) and the distributed simulation (right).
까지잠항하고다시 100 m까지잠항하는것을확인할
수있다. 또한그에따른잠수함의 Trim 각도의변화
도 20 m 잠항까지는 6도, 20~100 m 잠항까지는 8도 를유지하는것을확인할수있다.
Table 2에서볼수있듯이시뮬레이션실행시간에
서는많은차이를보인다. 한대의컴퓨터에서수행되 는단일시뮬레이션의경우데이터전송과정에서시
간소비가없어 221.472초라는짧은시간내에시뮬
레이션이완료된다. 그러나분산시뮬레이션의경우
HLA/RTI를통해데이터를주고받는과정에서소요
되는시간이추가되어더많은시간이필요함을알수 있었다. 본논문의예제를통해분산시뮬레이션의장 점을직접검증하기는어려웠으나많은참고문헌에 서복잡한문제에대해분산시뮬레이션의장점을단 일시뮬레이션과비교한바있다[13,14]. 따라서본논문
에서는분산시뮬레이션의구현을위한방법론제시 에초점을맞추었다.
5. 결론 및 향후 연구 계획
본논문에서는이산사건/이산시간혼합형시뮬레
이션모델구조와간단하게연동될수있는 DEVS-
HLA 인터페이스를개발하였다. DEVS-HLA 인터페
이스는혼합형모델구조와 HLA/RTI를연결하기위
해내부에혼합형모델구조와동일한형태의인터페 이스 모델을 포함하고 있으며, 시뮬레이션 모델과
HLA/RTI 간의데이터교환을위한분산환경번역기
와모델번역기를가지고있다. 혼합형모델구조와
DEVS-HLA 인터페이스를사용하여잠수함의잠항시
나리오를모델링하여분산환경에서효과적으로시뮬 레이션을수행할수있음을검증하였다. 향후에는다 양한시뮬레이션예제를통해 DEVS-HLA 인터페이 스를검증할계획이다.
감사의 글
본연구는국방과학연구소수중운동체기술특화센
터 SM-11과제 “수중운동체의체계/부체계기능및
성능 시뮬레이션을 위한 네트워크 기반의 가상
(Virtual) 복합시스템모델구조(Architecture) 연구”,
서울대학교 BK21 해양기술인력양성사업단및해양 시스템공학연구소의지원과 2009년정부(교육과학기 술부)의재원으로한국연구재단의지원을받아연구 되었음(KRF-2008-314-D00494, KRF-2009-0086033, R33-2008-000-10150-0)을 밝히며, 이에 감사 드립 니다.
참고문헌
1.방경운, “조선 공정 계획용 이산 사건과 이산 시간
혼합형시뮬레이션프레임워크”, 석사학위논문, 서
울대학교, 2006.
2.차주환, 노명일, 방경운, 이규열, “조선 공정 계획의
수립완성도향상을위한이산사건및 이산시간 혼합형시뮬레이션 프레임워크”, 한국시뮬레이션학 회논문지, Vol. 17, No. 4, pp. 71-80, 2008.
3. Zeigler, B. P., Praehofer, H. and Kim, T. G., “Theory of Modeling and Simulation”, 2nd Edition, Academic Press, 2000.
4.이규열 등, 수중운동체 특화연구센터 SM-11과제
“수중운동체의체계/부체계기능및성능시뮬레이
션을위한네트워크기반의가상복합시스템모델 구조연구”, 1단계 최종보고서, 국방과학연구소 연
구보고서, TECD-413-050663, 2006.
5.이성준, 조두연, 강정호, 이효광, 이규열, 김태완, 한 순흥, 정희석, “수중운동체의분산시뮬레이션을위 한 HLA 기반의 모델 구조 연구”, 2006년 한국 CAD/CAM학회 학술발표회, pp.913-921, 평창, 2006.2.9-10.
6.차주환, 이성준, 유성진, 이규열, 최항순, 성우제,
“수중 운동체의 가상 시제 기술 개발을 위한
HLA(High Level Architecture) 기반의 모델링 및
시뮬레이션에관한 연구”, 2004년한국CAD/CAM
학회학술발표회, pp. 345-354, 평창, 2004.2.12-14.
7.차주환, 이성준, 유성진, 이규열, 최항순, 성우제,
“High Level Architecture 기반의수중운동체 분산 시뮬레이션방안연구”, 2004년대한조선학회춘계
학술발표회, pp. 1494-1505, 통영, 2004.4.22-23.
8.차주환, 이성준, 유성진, 이규열, 김태완, 한순흥,
“High Level Architecture 기반의개략적인수중운 동체모델링및시뮬레이션에관한연구”, 제5회해 상무기체계발전세미나, pp. 8-14, 진해, 2004.6.3-4.
9. HDW(Howaldtswerke - Deutsche Werft), “Operation and Diving Instruction”, TM 0764.413, 1992.
10.함승호, 차주환, 이규열, 박광필, 노명일, “이산 사 건및 역학기반이산시간혼합형모델링에 의한 잠수함의잠항부상시뮬레이션”, 2008년대한조선
학회추계학술발표회, pp. 163-171, 창원, 2008.11.13- 15.
Table 2.Comparison of the performance results of the manual scheduling by the manager and the automatic scheduling by the developed system on the specific day
종류 실행 시간
단일 시뮬레이션 221.472초 분산 시뮬레이션 631.295초
![Fig. 1. Combined discrete event and discrete time simulation model architecture – ‘Atomic Model’ [1,2] .](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5593961.487270/2.892.458.760.223.479/combined-discrete-event-discrete-simulation-architecture-atomic-model.webp)