JKSCI
An Enhanced Two-Stage Vehicle License Plate Detection Scheme Using Object Segmentation for Declined License Plate Detections
1)
Sang-Won Lee*, Bumsuk Choi**, Yoo-Sung Kim*
*Graduate Student, Dept. of Information and Communication Eng., Inha University, Incheon, Korea
**Researcher, Korea Electronics and Telecommunications Research Institute, Daejeon, Korea
*Professor, Dept. of Information and Communication Eng., Inha University, Incheon, Korea
[Abstract]
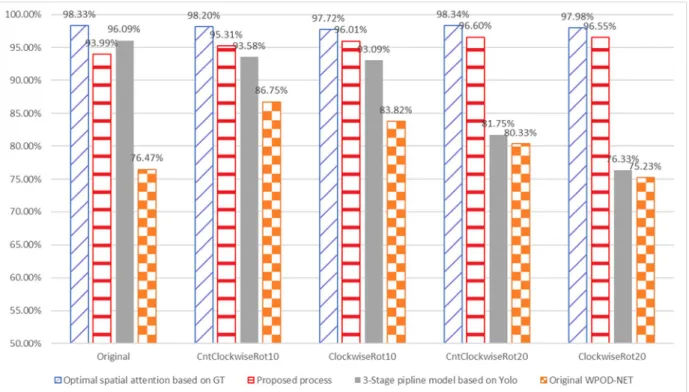
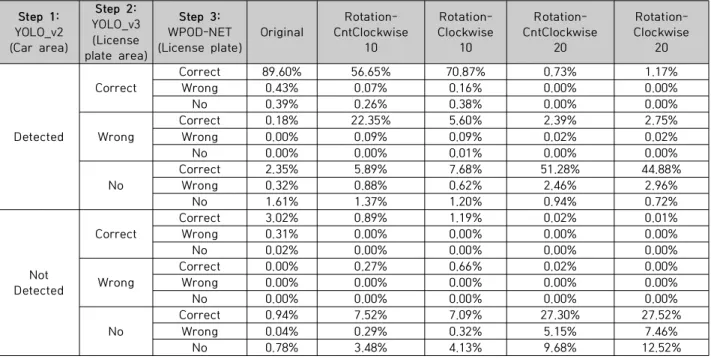
In this paper, an enhanced 2-stage vehicle license plate detection scheme using object segmentation is proposed to detect accurately the rotated license plates due to the inclined photographing angles in real-road situations. With the previous 3-stage vehicle license plate detection pipeline model, the detection accuracy is likely decreased as the license plates are declined. To resolve this problem, we propose an enhanced 2-stage model by replacing the frontal two processing stages which are for detecting vehicle area and vehicle license plate respectively in only rectangular shapes in the previous 3-stage model with one step to detect vehicle license plate in arbitrarily shapes using object segmentation. According to the comparison results in terms of the detection accuracy of the proposed 2-stage scheme and the previous 3-stage pipeline model against the rotated license plates, the accuracy of the proposed 2-stage scheme is improved by up to about 20% even though the detection process is simplified.
▸Key words: Enhanced vehicle license plate detection scheme, Rotated plate images, Object segmentation, Detection accuracy, Simple detection process
[요 약]
본 논문에서는 실제 도로에서 기울어진 촬영 각도로 인하여 회전된 차량 번호판을 정확하게 탐지 하기 위하여 객체 세그먼테이션 (object segmentation)을 이용하는 개선된 2-단계 차량 번호판 탐지 모 델을 제안한다. 기존 연구에서 제안한 3-단계 차량 번호판 탐지 파이프라인 모델은 차량 번호판이 많 이 기울어져 있을수록 탐지 정확도가 낮아지는 문제가 있다. 이를 해결하기 위해서 기존의 3-단계 모 델에서 사각형 형태만으로 차량 후보 영역과 차량 번호판 후보 영역을 인식하는 전위 2개의 처리 단 계 대신에 임의의 형태로 객체 탐지가 가능한 객체 세그먼테이션을 이용하는 하나의 단계로 대체함 으로써 탐지 과정을 단순화하였으며 궁극적으로는 임의의 형태로 기울어진 차량 이미지에 대해서도 탐지 성능을 개선하였다. 기울어진 차량 번호판 이미지를 대상으로 실시한 차량 번호판 탐지 모델의 정확도 분석 실험 결과에 의하면 기존의 3-단계 차량 번호판 탐지 모델보다 제안된 2-단계 기법이 탐 지 과정을 단순화하였음에도 최대 약 20%의 탐지 정확도를 개선할 수 있는 것으로 분석되었다.
▸주제어: 개선된 차량 번호판 탐지 기법, 회전된 차량 번호판, 객체 세그먼테이션, 탐지 정확도, 단순 탐지 과정
∙First Author: Sang-Won Lee, Corresponding Author: Yoo-Sung Kim
*Sang-Won Lee ([email protected]), Dept. of Information and Communication Eng., Inha University **Bumsuk Choi ([email protected]), Korea Electronics and Telecommunications Research Institute *Yoo-Sung Kim ([email protected]), Dept. of Information and Communication Eng., Inha University
∙Received: 2021. 08. 13, Revised: 2021. 09. 13, Accepted: 2021. 09. 13.
Copyright ⓒ 2021 The Korea Society of Computer and Information http://www.ksci.re.kr pISSN:1598-849X | eISSN:2383-9945
![Fig. 1. Internal process of vehicle license plate detection model using object segmentation 우, [9]에서 사용한 데이터 추가(data augmentation)를 위한 이미지 크기인 208x208로 발견한 차량 번호판 영역 을 잘라내어 공간적 집중 영역으로 사용하고, 만일 차량 번호판을 찾지 못한 경우에는 전체 입력](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5309364.382211/5.892.108.790.158.409/internal-segmentation-augmentation-잘라내어-영역으로-사용하고-번호판을-경우에는.webp)