<응용논문> DOI https://doi.org/10.3795/KSME-A.2017.41.7.655 ISSN 1226-4873(P rint) 2288-5226(Online)
다중 카메라와 절대 공간 좌표를 활용한 이동 로봇의 강인한 실내 위치 인식 시스템 연구
모세현*· 전영필**· 박종호***· 정길도****
* 아모텍, ** 삼성전자, *** 서남대학교 전기전자공학과
**** 전북대학교 전자정보공학부/전자정보신기술연구소
Study of Robust Position Recognition System of a Mobile Robot Using Multiple Cameras and Absolute Space Coordinates
Se Hyun Mo*, Young Pil Jeon**, Jong Ho Park*** and Kil To Chong****
* Amotech, motor circuit R&D Group, ** Samsung Electronics Co., Ltd.
*** School of Electrical & Electronic Engineering, Seonam Univ.
**** School of Electronic Engineering / Advanced Electronics and information Research Center &
Chon-buk Nat'1 Univ.
(Received July 9, 2015 ; Revised March 31, 2017 ; Accepted March 31, 2017)
Key Words: Localization(위치 인식), Mobile Robot(이동 로봇), Path Planning(경로 계획), Vision(카메라) 초록: ICT 기술의 발달로 로봇의 실내 활용이 증가하고 있다. 현재 이용되거나 향후 이용 범위가 증가할 수 있는 운반, 청소, 안내 로봇 등의 연구가 고도화 될 것이다. 실내 공간에서 이동 로봇 활용을 원활히 하기 위해 자기 위치 인식 문제는 가장 먼저 해결되어야 하는 중요한 연구이다. 추가적으로 이동 로봇 의 위치가 인위적으로 이동되거나 예기치 못한 충돌로 인해 기존의 경로에서 이탈하였을 경우 등에서도 이동 로봇이 이런 상황을 인지하고 판단하여 목적지로 정확히 이동할 수 있는 강인한 시스템이 필요하 다. 따라서 본 연구에서는 이동 로봇의 자기 위치 관련 여러 문제들을 해결하고자 실내에 설치되어 있 는 다수의 CCTV 등 외부 영상 및 이를 절대 공간 좌표 변환한 정보와 더불어 이동 로봇의 엔코더 정보 등을 융합하여 강인한 위치 인식 시스템을 구현하였다. 추가로 이동 로봇 시스템에 경로 주행 알고리즘 인 벡터 필드 히스토그램 기법을 적용하였고 실제 실험 수행 후 연구 결과를 확인하였다.
Abstract: With the development of ICT technology, the indoor utilization of robots is increasing. Research on transportation, cleaning, guidance robots, etc., that can be used now or increase the scope of future use will be advanced. To facilitate the use of mobile robots in indoor spaces, the problem of self-location recognition is an important research area to be addressed. If an unexpected collision occurs during the motion of a mobile robot, the position of the mobile robot deviates from the initially planned navigation path. In this case, the mobile robot needs a robust controller that enables the mobile robot to accurately navigate toward the goal. This research tries to address the issues related to self-location of the mobile robot. A robust position recognition system was implemented; the system estimates the position of the mobile robot using a combination of encoder information of the mobile robot and the absolute space coordinate transformation information obtained from external video sources such as a large number of CCTVs installed in the room. Furthermore, vector field histogram method of the pass traveling algorithm of the mobile robot system was applied, and the results of the research were confirmed after conducting experiments.
Corresponding Author, [email protected]
Ⓒ 2017 The Korean Society of Mechanical Engineers - 기호설명 -
: 로봇의 자세
: 로봇의 좌우바퀴 반지름
, : 좌우 바퀴의 각 속도
: 로봇의 무게중심과 각 바퀴의 거리
: 중심에서의 선속도
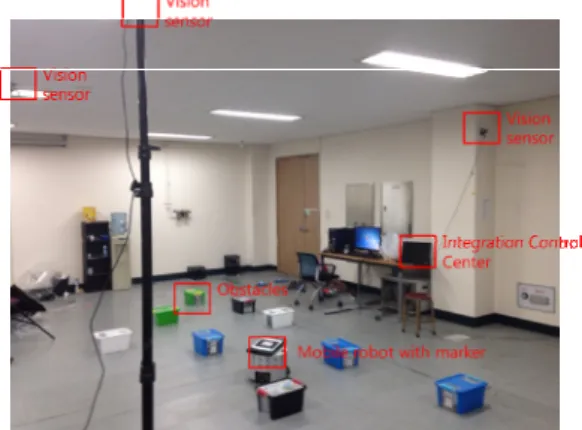
Fig. 1 Experiment Environment
= : 회전속도
: 위험도
: 장애물과의 충돌 위험 정도
: 로봇의 진행방향과 격자 와의 각도 C : 카메라 파라미터
s : 스케일
R, Q : 잡음 공분산(측정/공정)
1. 서 론
현대 건축에 있어 다양한 공학 기술들의 결합 이 이루어졌고 대표적으로 이동 통신을 비롯한 ICT(Information Communication Technology) 기술 등이 융합되어 기존의 실외공간에서 이루어지던 업무, 여가활동, 쇼핑 등 여러 활동들이 실내 공 간에서 이루어지게 되었다.(1) 따라서 실내 공간에 서 이루어지는 생활의 비중이 점차 증가되고 있 으며 이에 실외를 대상으로 제공되거나 연구되어 지던 위치 기반 서비스(Location based Service, LBS)인 네비게이션(Navigation) 등의 서비스가 실 내로 확장되어 지고 있으며, 마이크로 컨트롤러 의 지속적인 발달을 바탕으로 실내에서의 이동 로봇 활용성이 증가하고 있다.(2,3)
이동 로봇이 경계, 운반, 안내 등의 다양한 업 무를 수행하게 됨에 따라 업무 수행 중 충돌이나 임의로 위치가 옮겨졌을 경우에 기존의 이동 로 봇의 경우 절대적인 자기 위치 정보를 알지 못할 뿐 아니라 이동 로봇의 헤딩값을 알지 못하는 문 제점을 가지고 있다.(4) 이러한 문제점을 해결하기 위해 실외에서는 이동 로봇의 위치 인식을 위하 여 GPS를 통해 정확한 위치 인식이 구현되고 있 다. 하지만 실내의 경우는 여러 가지 장애 조건 에 의하여 GPS 신호가 단절되기에 GPS를 통한 위치 인식은 활용하기 어렵고 이에 실내에서 로 봇의 위친 인식은 다른 방법들이 필요하다.
기존 실내 이동 로봇의 위치 인식 기법은 초음 파, 적외선, Zigbee, Bluetooth 등 외부 센서 데이 터를 활용하는 방법이 대부분이며 특히 초음파를 이용하는 방법으로 MIT의 Cricket 무선 측위 시 스템이 잘 알려져 있다. 이는 초음파 송신기와 수신기를 이용하여 각 송· 수신기들의 거리를 계 산하는 방법으로 로봇의 위치를 인식한다. Zigbee 와 Bluetooth를 이용하는 방법은 수신 신호 세기 인 RSSI(Received Signal Strength Indicator)를 이용 하여 기준이 되는 Bluetooth 수신 장치를 기준으
로 삼각 측량을 이용하여 위치를 계산하면 되는 것으로 다수의 센서를 배치하면 정확도가 향상되 지만, 동적 환경에서의 사용은 정확도가 떨어진 다는 단점이 있다.(5,6) 또한 위의 방법들은 온도, 태양광 등 주위의 환경에 의해 많은 영향을 받게 되므로 상황에 따라서 정확한 위치 인식을 수행 하지 못하는 문제가 있을 수 있다.
따라서 본 논문에서는 외부 환경에 영향을 덜 받는 영상 정보를 이용하여 실내 이동 로봇의 자 기 위치 인식을 수행하며 절대 공간 좌표를 활용 하여 위치 인식을 수행하기 때문에 이동 로봇의 헤더 방향을 정확히 파악할 수 있어 임무 수행 중 이동 로봇의 진행 방향을 잃어버리지 않는다. 영상 획득은 방범용으로 많이 사용되는 CCTV 등 을 이용하여 획득할 수 있다. 2장은 실제 실험 환경에 대한 정보 및 이동 로봇 제어 방식에 대 한 내용을 정리한 것이고 3장에서는 실제 진행된 실험 결과를 분석하였으며 마지막으로 4장에서 연구 결과를 정리하였다.
2. 본 론
2.1 실험 구성
본 연구에서 실제 실험 환경은 Fig. 1과 같다.
좀 더 세부적으로 살펴보면 이동 로봇과 3대의 외부 카메라 그리고 외부 정보 및 상황 정보 등 을 수집, 처리하는 종합 제어 센터(Integration Control Center)로 구성되어지며 종합 제어 센터는 노트북으로 대체하였고 이동 로봇은 외부 영상 정보와 이동 로봇의 엔코더 정보 등을 종합하여 확장 칼만 필터(Extened Kalman Filter, EKF)를 통 해 데이터 융합하고 이렇게 만들어진 융합 정보 를 다시 이동 로봇의 자율 주행에 활용하게 된
항 목 사양(Specification) 전원 입력 DC +10[v] ~ +17[v]
적용 모터 BLDC(Brushless DC) 모터
최대 제어 모터 2개
최대 출력 전류 3.5[A]
모터 제어 방식 PWM 전압 제어
피드백 장치 엔코더 피드백
센 서 초음파(Ultrasonic Sensor) Table 1 Mobile Robot Specification
Fig. 2 Mobile Robot
Fig. 3 Camera
다. 따라서 이와 같은 실험을 진행하기 위해서는 이동 로봇의 기구학 및 자율 주행 알고리즘, 카 메라 좌표변환 등이 필요하다.
2.1.1 세부 실험 구성 요소
본 논문에서 활용하고 있는 이동 로봇 및 카메 라 정보를 먼저 설명하고자 하여 이에 이동 로봇 의 사양은 Fig. 2와 같이 원형 구조로서 45도마다 8개의 초음파 센서를 가지고 있다. Table 1은 이 동 로봇의 사양을 정리한 것이다.
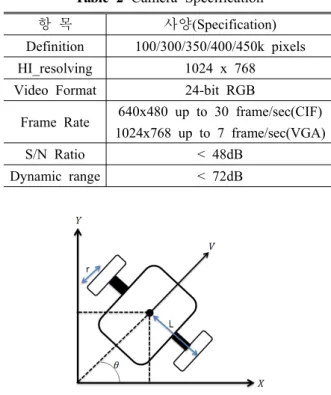
외부 영상을 획득하기 위한 카메라(Vision)는 Fig. 3과 같고 24bit RGB 형식의 Video 포맷 형태 로 Table 2와 같은 사양을 가지고 있다.
항 목 사양(Specification) Definition 100/300/350/400/450k pixels HI_resolving 1024 x 768 Video Format 24-bit RGB
Frame Rate 640x480 up to 30 frame/sec(CIF) 1024x768 up to 7 frame/sec(VGA) S/N Ratio < 48dB
Dynamic range < 72dB Table 2 Camera Specification
Fig. 4 Differential Drive Mobile Robot 2.1.2 이동 로봇의 기구학 및 경로 계획 알고리즘 이동 로봇을 제어하기 위해서는 기구학이 필수 적으로 필요하다.(7) 본 실험에서 활용한 이동 로 봇은 차륜 구동 방식으로 Fig. 4에 나타낸다.
이동로봇의 바퀴가 미끄러짐이 없다고 가정하 면(Nonholonomic) 차륜 구동 방식의 이동 로봇 기 구학은 식 (1)과 같다.
cos sin
(1)
이동 로봇의 무게 중심에서의 선속도 는 식 (2)와 같고 각 바퀴의 선속도와 각속도의 관계는 식 (3)과 같다.
(2)
(3)
따라서 각 바퀴의 평균 각속도는 식 (4)과 같고 각속도 를 각 바퀴의 선속도로 표현하면 식 (5) 와 같다.
(4)
Fig. 5 Polar Histogram
(5) 식 (4)와 식 (5)에 의해 바퀴의 각속도와 이동 로봇의 속도 관계는 식 (6)과 같다.
(6)
식 (1)에 식 (6)을 대입하여 각 바퀴의 속도의 직교좌표 관계식을 유도하면 식 (7)과 같다.
(7)
그리고 본 연구에서는 이동 로봇의 기본적인 주행 제어를 위하여 이동 로봇의 엔코더(Encoder) 와 초음파를 이용한 Dead Reckoning 기법을 활용 하였고 경로 계획 알고리즘으로는 벡터 필드 히 스토그램(Vector Field Histogram) 기법을 활용하였 다. 위의 제어 기법 등이 실제 적용된 이동 로봇 시스템을 이용하여 현실에서 로봇 위치 인식 및 자율 주행이 구현된 결과를 확인하였다.
본 논문에서 사용한 벡터 필드 히스토그램 기 법은 버추얼 포스 필드 기법으로 히스토그램 그 리드(Histogram gird)로부터 나오는 각 척력을 더 할 때 생기는 데이터 축소, 즉 이동 로봇의 주위 장애물로부터 발생되는 척력을 모두 합하여 1개 의 척력 벡터로 나타내기 때문에 장애물 정보에 대한 손실이 발생하는 문제점을 보완하기 위해 개발되었고 2차원의 카시안 히스토그램 그리드 (Cartesian histogram grid)를 기반으로 한다.(8)
미지의 장애물과의 충돌을 회피하며 목적지까 지 도달하기 위해서 2단계의 과정을 거친다. 첫 번째 단계는 2차원의 장애물 정보를 1차원의 폴 라 히스토그램(Polar-histogram)으로 축소하는 과정 이다. 폴라 히스토그램을 생성하는 과정에서 반 드시 구현되어야 할 기능은 특정 격자가 어느 섹 터에 포함되는지와 각 섹터에 포함되어 있는 격 자들의 위험도 의 합 POD(Polar Obstacle Density)값을 어떻게 계산할 것인가이다. 폴라 히
스토그램을 생성하는 목적은 특정 섹터 k에 포함 되는 POD값 를 구하는데 있다. 은 장애물과 의 충돌 위험 정도를 의미한다. 식 (8)은 이동 로 봇과 장애물이 이루는 각을 이용하여 포함될 섹 터를 선정하는 식이다.
tan
(8)
(9)
식 (9)는 POD를 구하는 수식이다. 여기서 는 이동로봇의 진행방향을 기준으로 한 격자
와의 각도, 는 이동로봇의 좌표값,
는 장애물 좌표값, 는 섹터 번호, 는 격자 의 위험도(risk value), 는 이동로봇과 장애물의 거리이다. 다음으로 두 번째 단계는 폴 라 히스토그램(Polar-histogram)으로 축소하는 과정 인 폴라 히스토그램을 구성하는 섹터들 중 가장 작은 극 장애물 밀도값(Polar Obstacle Density)을 선정하는 단계가 필요하다. 이동 로봇을 중심으 로 생성된 폴라 히스토그램은 360/개의 섹터가 존재한다. 더불어 Fig. 5에서와 같이 높은 POD값 을 가지는 섹터를 ‘봉우리(Peak)’, 낮은 POD값을 가지는 섹터를 ‘계곡(Valley)’라고 정의한다.(8) 계 곡들 중 특정값 이하의 POD 값을 가지는 섹터들 을 이동로봇의 진행 방향 후보 계곡이라고 한다.
봉우리는 이동로봇이 이동할 경우 장애물과의 충 돌 확률이 높은 섹터들의 모임을 의미하며, 계곡 은 이동 로봇이 다음 진행 방향섹터로 선택 가능 한 안전한 섹터들의 모임을 나타낸다.
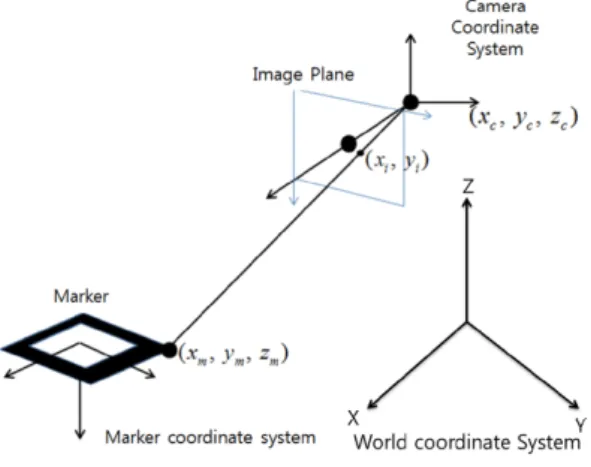
2.1.3 카메라 영상 데이터의 절대 좌표 변환 영상 기하학을 통해 이미지 평면(Image Plane) 에서 월드좌표계(World Coodination system)로 변
Fig. 6 Camera coordination
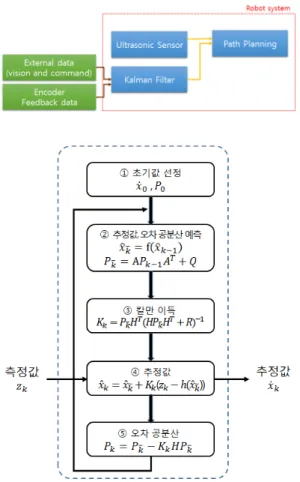
Fig. 7 System structure
환되며, 픽셀좌표계에서 월드좌표계로 변환 시 마커의 크기, 카메라 내 · 외부 파라미터와 카메라 의 Pan, Tilt 각을 인지하고 있어야 한다.
더불어 마커의 크기와 CCTV의 카메라 내부 파 라미터를 알고 있을 경우 이미지 평면에서 마커 좌표계(Marker coordination system)로 좌표변환을 통하여 이동 로봇의 마커와 카메라 사이의 상대 적 자세, 거리 정보를 알 수 있다.(4,9)
따라서 CCTV 이미지와 이동 로봇의 마커간의 관계를 나타내는 식은 다음 식 (10)과 같다.
(10) 단, C는 카메라 파라미터이고, 은 이미 지 평면상에 맺힌 마커의 상이고, 은 카메라가 기준이 되는 좌표계이다.
그리고 카메라 파라미터의 세부 사항은 식 (11) 을 통해 알 수 있으며, 이를 통해 이미지 평면에 서 카메라의 좌표계로 변환을 한다.
(11)
여기서 s는 스케일, 는 카메라 초점 거 리, 는 카메라 주점거리이다.
본 논문에서는 이동 로봇의 헤더 위치를 정확 하게 파악하기 위해 마커의 좌표가 아니라 절대 좌표인 월드좌표계가 필요하다.
따라서 다시 카메라 좌표계에서 월드 좌표계로 변환해야하며 식 (12)는 마커 좌표계를 다시 월드 좌표계로 바꾸기 위한 회전 행렬(R)이다.
cos sin sin cos
sin cos
cos sin
cos sin sin sin cos
sin cossin coscos
cos sin
(12)
이 회전 행렬을 식 (13)과 같이 활용함으로써 월드좌표계에서의 마커 위치, 즉 이동 로봇의 위 치를 구할 수 있다.
(13)
식 (10)에서 는 월드 좌표계,
는 카메라 좌표계, 는 월 드좌표계에서의 카메라 위치이다.
2.2 실험 시나리오 및 이동 로봇 시스템 제어 Fig. 7은 본 연구의 전체 실험 시나리오 및 실 험 환경 전체 구성을 간단히 구조화한 것이다.
Fig. 8은 시스템의 통합 제어 블록도 (Control Diagram)로 외부 영상 정보와 이동 로봇의 엔코 더 정보를 확장 칼만 필터(Extended Kalman Filter)를 이용하여 융합하고, 융합한 데이터를 이 동 로봇의 자율 주행에 활용하는 것을 나타내고 있는 것이다.
2.2.1 확장 칼만 필터(Extended Kalman Filter) 확장 칼만 필터를 이용하여 위치 추정을 향상 시키기 위해서는 마커를 통해 얻는 x =
Fig. 8 Control Diagram and Extended Kalman Filter
Fig. 9 Angle of view using 1 camera 의 이차원 정보와 좌· 우 바퀴의 오도메트리 (Odometry) 정보를 읽어 확장 칼만 필터로 융합 함으로써 로봇의 위치인식을 향상 시킬 수 있다.
칼만 필터는 선형 시스템을 대상으로 개발된 알 고리즘이다.(10,11) 때문에 비선형 시스템에는 적용 하지 못하지만 주위 시스템들은 대부분 비선형이 며 이 문제를 해결하기 위해 나온 칼만 필터가 확장 칼만 필터이다. 확장 칼만 필터의 시스템 모델은 아래 식 (14), (15)와 같이 정의한다.
(14)
(15)
확장 칼만 필터의 알고리즘은 Fig. 9와 같으며, 여기에서 R은 측정 잡음 공분산 행렬이고 Q는 공정 잡음 공분산 행렬이다. 더불어 확장 칼만 필터 수행 중 R, Q의 실제값은 이론적으로 구하 기 어렵기에 실험 데이터를 분석 후 단위행렬에 특정한 결과값을 곱해 처리하였다.
외부 영상 정보를 통해 알 수 있는 로봇의 위 치와 자세는 식 (16)과 같으며, 상태 벡터의 공분 산 행렬은 식 (17)과 같이 정의 한다.
(16)
(17)
이동로봇의 위치를 인식하기 위한 모션(Motion) 모델은 아래 식 (18)과 같다.
∆ ∆
∆ ∆
∆
∆ ∆
∆ ∆
∆ ∆
∆ ∆
∆ ∆
(18)
이 때, ∆
∆ ∆
, ∆
∆ ∆
이고 는 이동 로봇의 이전 상태
의 추정 위치이고, ∆ ∆는 이전까 지의 좌· 우 바퀴가 각각 회전하여 이동한 거리 이다. b는 차륜구동 방식의 좌 · 우 바퀴 사이의 거리이다.
3. 실험 결과
본 논문에서는 다중의 외부 영상정보와 마커를
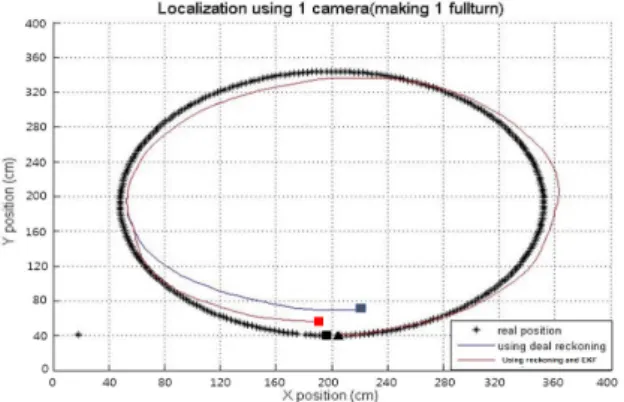
Fig. 10 1 fullturn using 1 camera
Fig. 11 10 fullturn using 1 camera
Fig. 12 Angle of view using 3 camera
Fig. 13 1 fullturn using 3 camera 이용하여 로봇의 실내 주행 능력 향상과 더불어
영상 정보를 통해 확보된 절대 공간 좌표를 활용 하여 이동 로봇의 강인한 실내 위치 인식 결과를 확인하고자 몇가지 실험을 수행하였다.
3가지의 실험을 통해 외부 영상 정보의 필요성 및 다중 카메라 활용의 필요성 그리고 절대 공간 좌표 활용을 통해 강인한 로봇 위치 인식 실험 결과를 확인하였다.
먼저, 첫 번째 실험은 다중의 외부 영상정보를 이용 로봇의 실내 주행 능력 향상에 관한 것으로 카메라 1대와 3대를 이용하여 이동 로봇으로 하 여금 주어진 원 궤적을 추적하도록 하였다. 이를 위해 엔코더 정보만을 이용했을 때와 엔 코더, 외부 영상 정보를 융합한 정보를 이용하여 주행하는 경우를 비교하였다. 이동 로봇의 슬립 (Slip) 현상을 알아보기 위한 실험으로 이동 로봇 이 슬립으로 인해 항상 일정하게 주어진 원 궤적 을 주행할 수 없다는 점을 보완하기 위한 것으로 외부 영상 정보의 필요성을 확인하는 실험이다.
Fig. 9는 화각이 제한된 카메라 1대를 사용하는 경우로 Fig. 10과 Fig. 11은 엔코더 정보만을 이용 하는 경우와 1대의 카메라를 이용하여 외부 영상
정보와 엔코더 정보를 확장 칼만 필터로 융합한 정보를 이용하여 기준 경로(Real Position)를 각각 1바퀴, 10바퀴를 주행시킨 결과이다.
실험 결과를 세부적으로 분석하면 먼저 원 궤 적을 1바퀴 돌렸을 경우에는 엔코더 정보만을 이 용한 경우와 확장 칼만 필터로 융합한 정보를 이 용한 경우 모두 큰 오차가 없이 정상적으로 주행 을 마무리하였다. 그러나 10바퀴 회전을 시켰을 경우 엔코더 정보만을 이용한 경우나 확장 칼만 필터를 통해 융합된 정보를 이용한 경우 모두 오 차가 기하급수적으로 증가하여 자율 주행이 불가 능하다는 것을 확인하였다. 이는 전체 원 궤적을 카메라 1대만으로 확인할 수 없기 때문이다.
Fig. 12는 화각이 제한된 카메라 3대를 사용하 는 경우로 Fig. 13과 Fig. 14는 엔코더 정보만을 이용하는 경우와 3대의 카메라를 이용하여 외부 영상 정보와 엔코더 정보를 확장 칼만 필터로 융 합한 정보를 이용하여 기준 경로(Real Position)를 각각 1바퀴, 10바퀴를 주행시킨 결과이다.
실험 결과를 세부적으로 분석하면 먼저 원 궤 적을 1바퀴 돌렸을 경우에는 1개의 카메라를 이 용하였을 때와 마찬가지로 2개의 정보 모두 큰
Fig. 14 10 fullturn using 3 camera
Fig. 15 Autonomous using 3 camera
Fig. 16 Heading direction recognition for mobile robot
오차가 없이 진행되는 것을 확인하였다.
그러나 10바퀴를 이동시켰을 경우에는 엔코더 정보만을 이용한 경우 오차가 기하급수적으로 증 가하여 이동 로봇의 자율 주행이 불가능하였다.
그렇지만 확장 칼만 필터로 융합한 정보를 이 용한 경우에는 오차 범위가 카메라 화각 영역안 에서 25cm 내로 이동 로봇의 자율 주행이 가능 함을 확인하였다. 이와 같은 결과를 통해 다중 카메라를 활용한 외부 영상이 이동 로봇의 슬립 현상을 보정하고 강인한 주행을 가능하게 하는 것을 확인할 수 있었다.
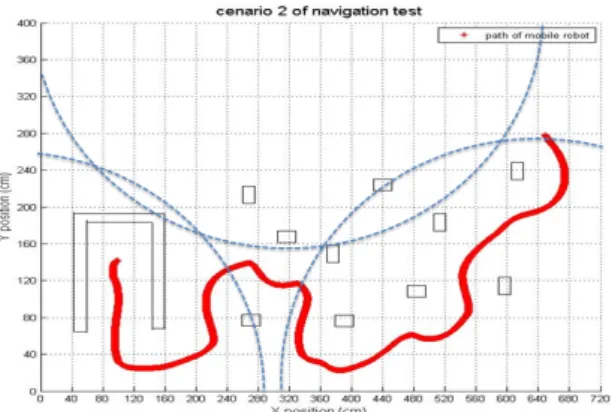
다음으로 외부 영상 정보를 통해 얻을 수 있는 절대 공간 좌표를 활용하여 이동 로봇의 실내 자 기 위치 인식 및 경로 주행 결과가 좋음을 보여 주는 실험이다. Fig. 15는 카메라 3개를 기반으로 영상 정보 및 절대 공간 좌표를 이동 로봇에게 제공하며, 이동 로봇은 벡터 필드 히스토그램 기 법을 적용하여 자율 주행을 성공적으로 수행하는 지를 확인하는 실험한 결과로써 이동 로봇이 실 시간으로 장애물들을 회피하며 목적지에 정확히 도달하는 것을 확인할 수 있었다.
이동 로봇의 전방 3면이 장애물로 막혀져 있고 정해진 목표로 주행하는 실험에서 일반적인 경우 로봇은 출구를 찾지 못하거나 로봇에 물리적으로 위험한 이동을 할 수 있다. 그러나 제안한 방법 에서는 Fig. 16과 같이 이동 로봇이 헤더 위치를 쉽게 파악하고 회전하여 정해진 목표로 순조롭게 이동하는 결과를 확인할 수 있다.
4. 결 론
실내 이동 로봇은 출발점부터 목표점까지 이동 하며 주어진 임무를 수행할 수 있는 강인한 시스 템 구성이 중요하다. 본 연구에서는 이미 실내에 설치되어있는 외부 영상 획득 장치(CCTV) 등과 같은 카메라(Vision system)를 기반으로 실내 이동 로봇에 부착된 마커와 탑재된 엔코더 센서 등을 통하여 위치를 인식하는 시스템을 제시하였다.
카메라와 엔코더의 정보는 확장 칼만 필터를 통 해 융합하였고 융합되어진 새로운 정보를 기반으 로 벡터 필드 히스토그램 알고리즘을 이용하여 이동 로봇의 경로 주행을 실험으로 검증하였다.
카메라와 마커를 활용한 위치 인식이 빛 아래 서 추정이 될 때, 초음파 센서의 지형의 형태가 불규칙적인 형태일 때 정보의 신뢰도가 낮아지는 경향에 의한 오차가 생겼지만 이동 로봇이 자율 주행을 수행하는데 문제가 발생되지 않았다. 이 는 레이저(Laser) 센서를 활용한다면 더욱 정교한 장애물 회피 방법이 될 수 있을 것이다. 이미 설 치되어 있는 카메라를 이용하고 저가의 초음파와 적외선 센서들을 이용할 경우 이동 로봇 활용 영 역을 넓히는데 있어서도 좋은 결과를 얻을 수 있 을 것이다.
후 기
이 본 연구는 산업통산자원부와 한국산업기술 진흥원의 “국제공동기술개발사업”의 지원을 받아 수행된 연구결과임.
This research was financially supported by the Ministry of Trade, Industry and Energy(MOTIE) and Korea Institute for Advancement of Technology (KIAT) through the International Cooperative R&D program (N046200012)
참고문헌
(References)
(1) Yoo, J. J. and Cho, Y. S., 1974, “Trends in Technical Development and Standardization of Indoor Location Based Services,” ETRI, Vol. 29, No. 5, pp. 51~61.
(2) Lee, J. K., So, W. S., Lee, J. S. and Yoo, S.
J., 2014, "High Accuracy of Indoor Hybrid Positioning Method based on Mobile Device,"
ETRI, Vol. 29, No. 6, pp. 113~125.
(3) Hong, S. H. and Jung, S. Y., 2010, "Localization Algorithm in Wireless Sensor Networks using the Acceleration sensor," Journal of KAIS, Vol. 11, No.
4, pp. 1294~1300.
(4) Jeon, Y. P., Park, J. H., Lim, S. T. and Chong, K. T., 2015, "Research for Robot Kinap Problem in the Indoor of Utilizing External Image Information and the Absolute Spatial Coordinates," Journal of KAIS, Vol. 16, No. 3, pp.
2123~2130.
(5) Mazuelas, S., Bahillo, A., Lorenzo, R. M., Fernandez, P., Lago, F. A. and Garcia, E., 2009,
“Robust Indoor Positioning Provided by Real- Time RSSI Values in Unmodified WLAN Networks,” IEEE Journal of Selected Topics in signal processing, Vol. 3, No. 5, pp.821~831.
(6) Roh, H. C., 2010, “Mobile Robot Localization based on Active Beacon System using Infrared Sensor in Indoor Environment,” KAIST master's thesis.
(7) Lee, K. Chung, C. and Chung, W., 2011,
"Accurate Calibration of Kinematic Parameters for Two Wheel Differntial Mobile Robots," Trans.
Korean Soc. Mech. Eng. A, Vol 25, No. 6, pp.
1603~1611.
(8) Borenstein, J. and Koren, Y., 1991, "The Vector Field Histogram - Fast Obstacle-Avoidance for Mobile Robots," IEEE Journal of Robotics and Automation, Vol. 7, No. 3, pp. 278~288.
(9) Yoon, S. J. and Han, W. S., 2007, “Global Localization of Mobile Robots Using Omni- directional Images,” Trans. Korean Soc. Mech.
Eng. A, Vol 31, No. 4, pp. 517~524.
(10) Yu, D. H., Park, J. H., Ryu, J. H. and Chong, K. T., 2015, “Attitude Control of Quad- rotor by Improving the Reliability of Multi -Sensor System,” Trans. Korean Soc. Mech. Eng. A, Vol.
39, No. 5, pp. 517~526
(11) Seung, J. H., Lee, D. J., Ryu, J. H. and Chong, K. T., 2013, “Precise Positioning Algorithm Development for Quadrotor Flying Robots Using Dual Extended Kalman Filter,” Journal of Institute of Control, Robotics and Systems, Vol. 19, No. 2, pp. 158~163.