A Study on Development of Inductive Sensor System for Locating Geared Part and Gear Position in Geared Shaft
오석규1, 배강열1,* Seok Gyu Oh1 and Kang Yul Bae1,*
1 경남과학기술대학교 메카트로닉스공학과 (Department of Mechatronics Engineering, Gyeongnam National Univ. of Sci. and Tech.)
* Corresponding author: [email protected], Tel: +82-55-751-3384 Manuscript received: 2013.11.22 / Revised: 2014.1.13 / Accepted: 2014.1.16
An inductive sensor system is proposed to detect the gear location and angular position of a geared shaft for automatic feeding of the shaft into the proper cutting position of the other end.
The system consists of two set of coils, bridge circuit, signal condition circuit, and microprocessor.
The coil sensors of the system measure changes of inductance along with the surface position of a geared shaft. The inductance changes are transformed to voltages by the bridge circuit, which are then conditioned and processed for the recognition of the gear. In order to incorporate with the experimental results with the sensor system, a finite element method (FEM) simulation for the magnetic field between the sensor and the shaft was carried out. The predicted results and the experiments revealed that the sensor system was appropriate for sensing the position of gear and the angular position of gear tooth of a geared shaft.
Key Words: Geared Shaft (기어 축), Gear Location (기어 위치), Angular Position (각위치), Inductive Sensor (유도형 센 서), Finite Element Analysis (유한요소 해석)
1. 서론
강재 실린더의 길이방향 양측 가장자리에 기어 형상을 갖는 기어 축은 자동차의 동력전달 부품으 로 활용되고 있다.1 기어 축을 가공하는 공정은, 우선 소재를 매거진에서 이송하여 공작기계의 척 에 물려 한 쪽의 기어를 선행 가공하고, 한 쪽이 가공된 소재를 다시 이송하여 나머지 한 쪽의 기 어가공을 수행하게 된다. 실린더 소재는 적재된 호퍼(hopper)에서 슈트(chute)를 타고 순차적으로 내려와 대기하고, 다음 가공 순서에 따라 자동화 장치에 의해 가공기의 척에 물리게 되며, 가장자
리에 기어가 가공되면 탈착되어 완료 매거진 (magazine)에 담겨지게 된다. 한편, 반대 위치의 가 장자리를 가공하는 단계, 즉 이미 가공된 기어 부 를 파지하고 아직 가공되지 않은 위치를 가공하기 위해서는, 가공된 기어 부를 파지하는 척으로써 기어 축의 지지를 견고하게 하고자 Fig. 1에 나타 난 바와 같이 기어와 같은 형상이므로, 파지 척에 형성된 기어 이에 정확히 삽입이 될 수 있도록 이 미 가공된 기어 부가 이송되어야 한다. 이를 위해 서는 기어가 이미 가공된 부분과 또 기어 이의 회 전 위치에 대한 검지를 필요로 하기 때문에 기어 축 이송을 완전 자동화하는 것이 어려운 실정이다.
Fig. 1 Schematic drawing of geared shaft and geared chuck
본 연구에서는 기어 축 가공을 완전 자동화하 기 위하여, 한 가장자리에 기어가 가공된 기어 축 소재로부터 기어의 위치와 기어 이의 회전위치를 동시에 판별하는 센서시스템을 개발하고자 하였다.
가공된 기어 부의 검지를 위해 초음파 센서를 적 용하면 발신부와 수신부의 위상차의 측정과 비선 형 특성의 처리가 필요하고,2 광 센서의 적용에 있 어서는 주위 광의 변화와 소재 표면 형상과 반사 특성의 변화를 고려해야 하며,3 측정 범위가 매우 작은 용량형 센서를 적용하기에는 기어 축 표면의 형상 변화가 상대적으로 크다는 문제점이 있다.4,5 유도형 센서는, 센서가 소재 표면에 상대적으로 근접할 때, 인덕턴스가 변화하는 현상을 기반으로 하여 변위를 측정하게 된다.6-9 본 연구에서는 코일 과 코어로 구성된 유도형 센서를 기어 축의 길이 방향 양측에 각각 상대적으로 위치할 수 있도록 설치하여, 기어가 가공된 가장자리와 가공되지 않 은 가장자리를 인덕턴스의 차이로 인식하고자 하 였고, 유도형 센서의 측정결과를 활용하여, 요구되 는 각도 위치로 기어 축을 회전하는 방법을 적용 하고자 하였다. 이를 위해, 기어부에 상대적으로 위치한 센서로써, 기어와의 상대적 회전운동 과정 에서, 기어의 이 끝과 이 홈 부분의 인덕턴스 차 이를 인식하게 하였다. 이와 함께 유한요소법을 이용한 전자기장 해석을 수행하여 제안된 센서와 기어 축 사이의 인덕턴스를 계산하여 실험의 결과 를 검증하고자 하였고, 소재의 자동취급장치를 제 작하여 제안된 유도형 센서의 적용성을 검증하고 자 하였다.
2. 센서 시스템의 설계 2.1 센서 설계
geared shaft
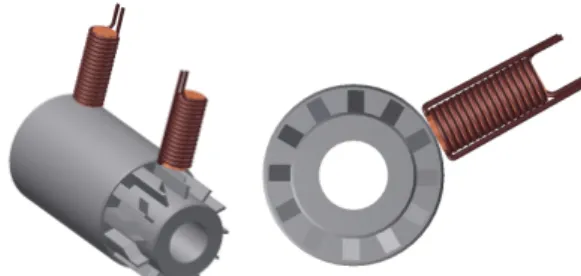
본 연구에서 제안하는 센서와 소재의 상대적 위치를 Fig. 2에서 보여 주고 있다. 센서는 코일과 코어로 구성되고, 한 센서는 기어 축의 실린더 부 분에, 다른 센서는 이미 가공된 기어 위치에 상대 적으로 놓이게 된다. 센서는 소재취급장치 프레임 의 고정 위치에 부착되고, 기어 축은 센서 위치로 송급된다.
코일과 코어로 구성된 센서는 인덕턴스로 모델 화할 수 있다. 실린더가 근접한 센서는 L1, 기어가 근접한 센서는 L2로 두고 이를 변으로 브리지를 구성한다. 주파수 f , 진폭 V 의 교류 전압이 인가 된 센서 브리지는 4개의 변으로 구성되고, 위 또 는 아래 두 변으로 구성하는 회로에서 코일과 코 어로 구성된 센서의 임피던스는 L이다. 나머지 변 에 저항 R을 두고, 초기에 브리지는 평형을 유지 하게 된다. 유도성 리액턴스를 구하면 XL=wL=
2 fLp 이고, 회로 전체의 임피던스는 Z=R+ jXL 이며, 유사 Ohm법칙을 사용하여 회로에 흐르는 전류를 구하면 다음과 같이 나타난다.10
I=V Z/ =(V /Z e) j(qv-qz) (1)
따라서 인덕터 양단에 걸리는 전압은 Vi= j LIw , 저항양단에 걸리는 전압은 Vr=RI 로 예측할 수 있다. 저항 양단에 걸리는 전압은 브리지를 구성 하는 두 센서 코일의 인덕턴스 변화에 따라 달리 나타나므로 이를 활용하여 기어의 존재 여부, 기 어 이의 방향 등 각 센서에 근접한 기어 축의 상 황을 검지할 수 있게 된다.
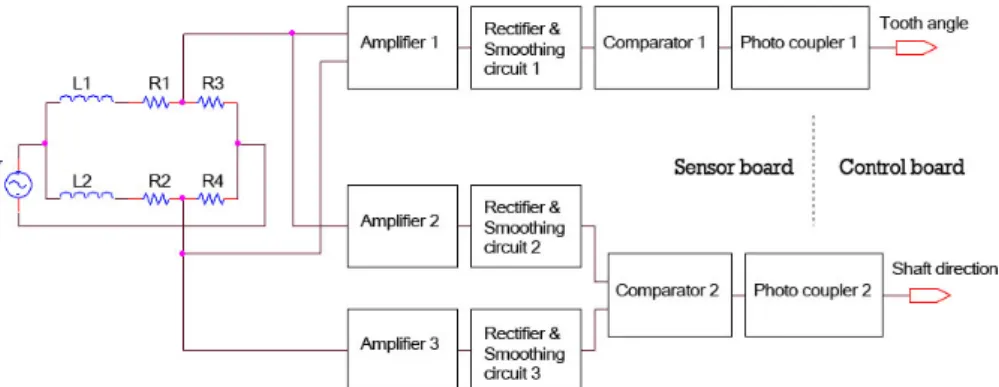
Fig. 3에서는 센서시스템을 구성하는 두 회로 보드의 개략도를 보이고 있다. 센서 보드 부에서 는 센서 브리지와 신호조절부를 보여주고 있고, 제어 보드로 나타낸 부분은 마이컴 제어기의 입력 부를 나타내고 있다. 브리지회로에서 L1과 L2는
두 센서 코일, R은 저항, V는 브리지 공급전원을 나 타내고 있다. 신호조절회로에서는 브리지 저항 (R3, R4) 양단에 나타나는 전압을 처리하여 기어 축이 놓인 방향과 기어 이의 상대 회전 위치를 검 지하게 된다. 브리지 공급전원은 최대 진폭 ±2V, 최대 주파수 10kHz의 사인파를 발생할 수 있는 신 호파형발생기를 활용하였다.
센서로 활용한 코일과 코어 조합의 인덕턴스는 5mH, 코어 길이는 l =11mm, 코어 반경은 a =1.25 mm, 코일의 권선수는 185회이었다. 저항 R1과 R2 는 각각 10Ω, 저항 R3과 R4는 각각 100Ω으로 설 계하였고, 저항 R3과 R4에 나타나는 비평형 전압 을 센서신호로 활용하였다. 우선 저항 양단의 전 압을 차동증폭기 1을 통해 증폭하고 평활화 한다.
이 신호는 기어의 이 끝에서 나타나는 전압신호보 다 약간 높은 전압으로 설정된 크기와 비교기 1에 서 비교된다. 설정 신호는 비반전 입력단에 인가 되고, 센서 신호는 반전 입력단에 인가된다. 기어 이의 이끝 부가 센서에 위치하게 되면 비평형 전 압은 낮게 되고, 이는 비교기에 설정된 문턱값 이 하가 된다. 센서 신호가 설정 신호보다 낮으면, 비 교기는 최대전압(15V)를 출력하게 된다. 이와 같은 원리는 L1과 L2 센서의 어느 위치에 기어가 놓이 게 되더라도 동일하게 작동한다. 비교기의 출력부 에서 출력을 포토커플러에 인가하여, 이의 출력 신호로써 제어기에 현재 기어 축의 각도에서 센서 는 기어 이의 끝을 인식하고 있음의 여부를 보고 하게 된다.
브리지회로의 저항 양단(R3, R4) 전압 각각을 증폭기 2와 증폭기 3에 인가하고, 증폭된 신호 각 각을 평활화하여, 이를 비교기에서 비교함으로써,
Fig. 4 Holder of geared shaft including half-circular hallow cylinder and rotating mechanism to support and handle geared shaft in gear sensing
기어 축에서 실린더 부분과 기어 이 부분을 구별 하고 기어 축의 방향성을 판별하게 된다. 실린더 부분에 놓인 센서가 기어 부분에 위치한 센서보다 더 높은 인덕턴스를 나타내게 되어, 실린더 부분 의 센서에 직결된 저항 양단의 전압은 기어 부 경 우의 전압보다 낮아지게 된다.
기어 축의 방향을 판별하기 위해서는 두 센서 코일에서 나타나는 인덕턴스의 변화를 감지하고, 기어 이 위치 즉 기어 축의 각도 판별을 위해서는 기어 축을 일정한 각도만큼 회전이 필요하다. 기 어 축을 축 방향으로 일정 각도 회전하여 이의 끝 과 홈을 판정하여 기어 축이 현재 놓인 위치를 판 단하게 하고, 또 이를 설정된 각도로 회전하도록 하는 회전기구가 필요하다. 이를 위해 Fig. 4와 같 은 반원형 실린더와 유도형 센서로 구성된 센서 Fig. 3 Schematic diagram of sensor circuit to deal with inductance changes with distance between the inductive sensors
and geared shaft
여, 소재 양단의 각 부분에 센서가 위치할 때 나 타나는 인덕턴스의 크기를 유한요소법(FEM)을 이 용하여 해석하고자 하였다.
센서와 소재 그리고 주위에 발생하는 자기장은 Maxwell의 방정식과 보조 방정식으로부터 다음과 같이 유도할 수 있다.11
-(1/ )mÑ2Ar=Jrs-s(¶Ar/¶t)
(2)
여기서, A 는 자기벡터포텐셜(magnetic vector potential), Jrs
는 외부전류벡터, m 는 투자율, s 는 전기전도 도이다. 제품이 축방향으로 길다고 가정하면 길이 방향(z 축)에 따른 장(field)의 변화가 없으므로 2차 원 장 지배방정식은 다음과 같이 표현 된다.
2 2 2 2
(1/ )( / x / y )A ( A/ t) J
m s s
- ¶ ¶ + ¶ ¶ + ¶ ¶ = (3)
한편 자속밀도 B는 자기벡터포텐셜을 이용하여, Br= Ñ ´Ar
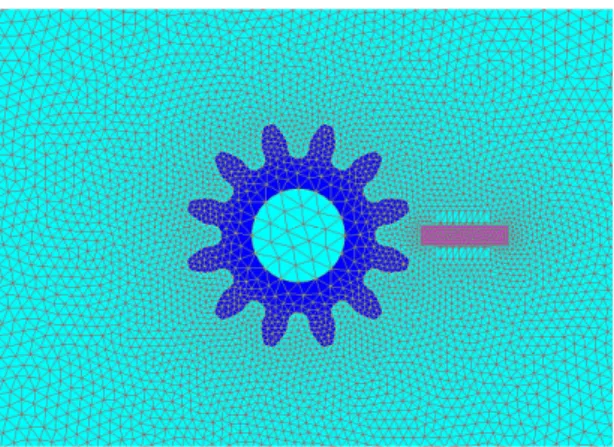
와 같이 도출할 수 있다. 센서와 기어 축 그리고 주위에 형성되는 자기장을 해석하고 센서 시스템의 인덕턴스를 계산하기 위해, 유한요소법 (FEM)에 기반을 두고 개발된, 상용 전자기장해석 프로그램 Flux2D를 이용하였다.12 해석에 사용한 기어 축 소재는 강재로, 길이가 60.6mm, 외경이 30.5mm, 내경이 11.6mm인 중공 축이고, 축의 한 쪽 끝에는 기어가 가공되어 있고, 기어 이 수는 12개로 원주 방향 30o 간격, 이 끝원의 직경은 29mm, 이 두께는 3.58mm, 이 높이는 3.85mm이었 다. 센서로 활용한 코어는 길이가 11mm, 반경이 1.25mm이었고, 코일의 권선수는 185회이었다. 기 어 축의 축방향으로는 자기장의 분포가 일정하다 고 가정하고, 축의 길이방향에 수직인 단면을 해 석평면으로 하는 2차원 해석모델로 두고, 이에 대 한 해석을 실린더 부와 기어 부에 대하여 각각 수 행하였다. 기어 부에 대한 유한요소모델을 Fig. 5에 서 보여 주고 있다. 기어 축이 가공되지 않은 실
린더 부분은 동일한 방법으로 별도의 해석영역으 로 모델링하였다. 소재의 표면과 센서 주위에서는 요소를 작은 크기로 분할하고, 주변부는 다소 더 크게 분할하였다. 해석영역은 삼각형 요소로 분할 하고, 요소 수는 2500여개이었다. 해석에서 코일에 흘려주는 전류는 0.1A, 강의 비투자율은 3000, 페 라이트 코어 비투자율은 1로 설정하였다. 인덕턴 스는 자기장 해석에서 얻은 자속수(λ)를 인가한 전 류로써 나누어 다음과 같이 계산할 수 있다.
λ=Nφ (4)
L=λ/I (5)
여기서 N 은 코일의 권선수, φ 는 자속, L은 인덕턴 스, I 는 전류이다. 공극의 변화에 의한 인덕턴스를 예측하기 위하여, 실린더의 경우에는 반경방향으 로 0~10mm로 변화하여 해석하였고, 기어의 경우 에는 이 끝 위치에서 반경 방향으로 0~10mm 공극 의 변화를 주고 또 센서와 기어 이 사이의 상대각 도 변화를 0~30o (15o일 때 센서와 기어 끝 중앙이 일치)로 변화하여 해석하였다.
3. 센서시스템의 실험
3.1 기어 및 기어 이송시스템
본 연구에서는 기어 축을 자동 이송하는 자재 취급장치를 제작하여, 제안된 기어 축 방향 및 각 도 판별 센서의 수행능력을 보이고자 하였다. Fig.
6은 제작된 기어 축 취급자동화시스템을 보여 주 고 있다. 장치의 구성은 소재를 정해진 위치까지
Fig. 5 Finite element solution domain including gear and inductive sensor
이동하는 공급실린더 및 제어장치, 소재를 센서 위치로 이동하는 이송실린더 및 제어장치, 인덕턴 스의 변화를 이용한 기어 축 방향판별 센서와 기 어 각도 조절용 회전 구동부, 소재를 척으로 이동 하는 이송테이블, 소재를 척으로 밀어 넣는 거치 실린더, 그리고 소재에서 기어로 가공된 부분을 파지하는 척으로 구성된다.
기어 축 소재가 송급 실린더 위치에 놓였다고 인식되면, 피스톤은 소재를 밀어내어 센서부로 이 송하게 한 후, 후진하게 된다. 2개의 유도형 센서 가 설치된 센서부에서는 기어 축 지지부의 하부 모터가 반원형 실린더를 구동함으로써 소재를 기 어 이 사이 각에 해당하는 정도의 각도로 회전하 게 된다. 센서부는 기어가 가공된 부분의 위치 판 정과 기어 이의 상대 위치를 검지하게 된다. 센서 제어부에서 기어 위치가 판별되고, 기어 이 끝의 중앙이 검지되면 기어 축 지지부의 반원형 실린더 는 회전을 중단한다. 검지가 완료되면, 그립이 이 동하여 소재를 파지하여 들어 올리게 되고, 기어 축 지지부는 초기 위치로 회전한다. 기어 축의 방 향이 반대라고 판단된 경우는 제어기가 소재를 파 지한 그립을 180o 회전하여 소재의 진행방향을 교 정하게 된다. 그립은 스텝모터로 구동되는 2축 테 이블에서 척의 위치까지 이송되고, 척의 전방에 위치한 매거진에 기어 축을 내려놓게 된다. 그러 면 소재를 척으로 이송하는 거치실린더의 피스톤 이 움직여 기어 축을 척으로 밀어 넣게 된다.
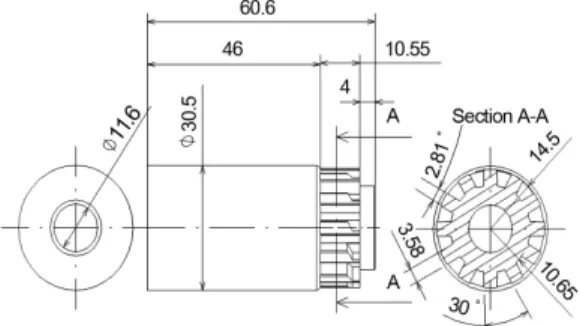
Fig. 7은 실험에 이용한 기어 축 소재의 치수와 형상을 보여주고 있다. 소재는 강재로, 길이
60.6mm, 외경 30.5mm, 내경 11.6mm인 중공축이고, 축의 한 쪽 끝에서 길이 방향 4mm 안쪽으로 10.55mm 폭의 기어가 가공되어 있다. 기어 이 수 는 12개로, 원주 방향 30o 간격으로 위치하고, 이 끝원의 직경은 29mm, 이 두께는 3.58mm, 이 높이 는 3.85mm이었다.
유도형 센서는 기어 부의 길이방향 중심, 그리 고 대칭 위치의 실린더 부에 각각 상대적으로 위 치하도록 설치하되, 축 방향에 수직방향으로, 기어 축의 중심에서 반경방향으로 15.25mm에 설치하였 다. 이때 센서와 실린더 사이에서 상대 거리는 0mm, 센서와 기어 끝 사이는 0.75mm가 된다. 기 어 부에서 나타나는 신호에서 기어 이 끝과 이 홈 을 센서가 상대적으로 회전할 때 나타나는 신호를 활용하여 이끝부를 인식하는 신호의 문턱값으로 활용하였다. 스텝각도가 1.8o인 스텝모터에서 2회 의 펄스를 인가하면 기어 축 지지부는 4인 기어비 에 의해 0.9o를 회전하게 된다. 이는 기어를 0.9o 간격으로 30o 시계방향으로 회전하여 나타나는 값 을 측정하여, 기어가 센서의 반경 이상 교차할 때 high 신호가 나타날 수 있도록 비교기의 비교치를 설정하였다. 실험에서, 16번의 위치에서 high 신호 를 얻을 수 있었고, 이를 기어 이의 패턴신호로 활용하였다.
제작된 센서 및 자재취급시스템을 구동하여 센 서의 동작 상태를 계측하고자, 센서 회로에서 소 재의 방향 및 각도 판별 중에 해당 위치에서 나타 나는 전압 신호를 오실로스코프로 측정하였다. 센 서시스템의 브리지회로에서, 한 변의 센서 코일이 기어 축의 실린더에 상대적으로 위치하고, 나머지 한 센서 코일이 기어 이의 끝, 중앙, 홈의 3가지 위치에 각각 놓일 때의 비평형 전압, 방향 판별 회로부의 증폭 이후의 신호, 평활회로 이후의 신 호를 각각 측정하였다. 각도 판별부에서는 센서가 Fig. 6 Automatic handling system for feeding geared
shaft
Fig. 7 Dimensions of geared shaft
라 유도형 센서의 인덕턴스 변화를 예측하기 위하 여 센서와 기어 축 주위를 해석영역으로 하여 자 기장 해석을 수행하였다.
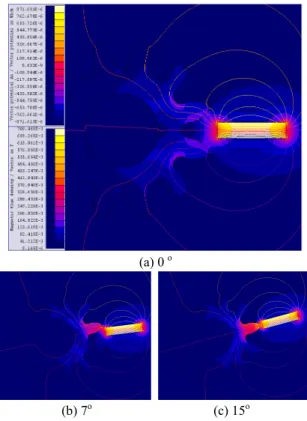
Fig. 8은 기어 축의 기어 부에 코일 센서가 상 대적으로 위치할 때의 자기장 해석결과로, 등치선 으로써 벡터포텐셜, 음영으로써 자속밀도를 나타 내고 있다. 특히 이 끝과 센서의 공극은 1.0mm 이 고, 센서와 기어 이 사이의 상대 회전위치를 대표 적으로 0, 7, 15o로 설정하였을 때의 자기장을 Fig.
8(a)-(c)에 각각 나타내었다. Fig. 8(a)에서와 같이 회 전각도가 0o인 경우, 벡터포텐셜이 최대 870x10-6 Wb/m, 자속밀도가 최대 700x10-3 Wb/m2 이고, Fig.
8(c)에서와 같이 각도가 증가하여 기어 이 끝과 센 서가 반경 방향으로 나란한 15o 위치에서는, 벡터 포텐셜이 최대 879x10-6 Wb/m, 자속밀도가 최대 706x10-3 Wb/m2로 나타나고 있다. 이는 강자성체인 소재가 근접하므로써 코일이 형성하는 자기장의 자로에서 자기저항을 줄여, 자속의 증가를 유발한 결과임을 알 수 있다.
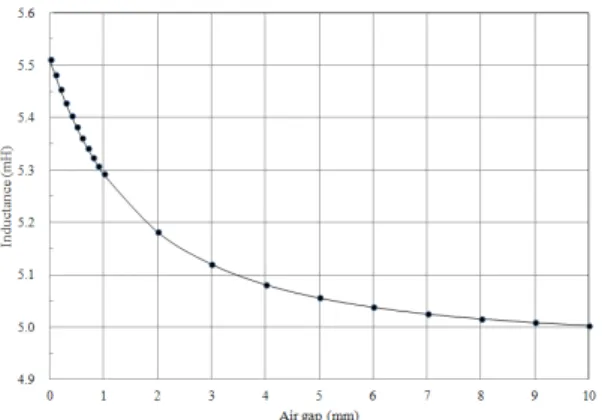
이와 같은 해석 결과에서 얻어진 자속으로써, 코일과 기어로 구성되어 나타나는 코일 부의 상당 인덕턴스를 산출할 수 있다. 공극을 0~10mm로 변 화하고, 센서의 위치를 0~30o까지 변화하였을 때, 인덕턴스의 변화를 Fig. 9에서 나타내고 있다. 공극 이 10mm인 경우는 센서 코일이 가지고 있는 인덕 턴스 5mmH의 크기와 동일하게 나타났고, 공극이 줄어들고, 상대각도가 15o에 근접할수록 인덕턴스 값이 커져, 최대 5.48mH의 크기가 나타나고 있다.
본 연구에서는 이 끝과 센서의 반경방향 상대 위치가 0.75mm이므로, 공극의 최소값은 이 끝과 센서의 상대각도가 15o인 위치에서 0.75mm의 공극 을 갖게 되고 이 때 약 5.3mH의 인덕턴스를 갖게 된다. 이를 벗어나는 각도에서는 인덕턴스 값이 점진적으로 줄어들게 되고, 이 뿌리 위치에 센서 가 상대적으로 놓이면, 약 5.15mH의 인덕턴스 값 을 나타내게 된다.
(a) 0 o
(b) 7o (c) 15o
Fig. 8 Distribution of vector potential and magnetic flux with variation of align angle and 1.0mm of air gap between inductive sensor and gear
Fig. 9 Change of effective inductance of inductive sensor with align angle and air gap between inductive sensor and gear
Fig. 10은 센서와 실린더의 자기장 해석에서의 자속으로부터 얻은 인덕턴스를 나타내고 있다. 센 서와 실린더 사이의 공극이 줄어들수록 센서의 상 당 인덕턴스가 급격히 증가하고 있고, 공극이 0인 경우, 약 5.5mH의 인덕턴스를 나타내고 있다. 본 연구에서는 실린더와 센서가 직접 접촉하므로 공
극이 0인 상태를 유지하였고, 이로써 약 5.5mH의 인덕턴스를 나타내는 결과를 예측할 수 있다. 공 극이 10mm 정도에 이르면, 실린더는 자기저항에 영향을 미치지 않고, 코일은 자체의 인덕턴스 크 기인 5.0mH의 크기가 나타남을 알 수 있다. 따라 서 본 연구에서 설정한 기어 축과 2개 센서의 상 대 위치에서는, 실린더에 위치한 센서의 인덕턴스 와 기어부에 위치한 센서는 최소 0.2mH(기어 이 끝)에서 최대 0.35mH(기어 이 홈)만큼 차이가 나 타나고 있다.
Fig. 11에서는, 센서와 기어 축 간의 인덕턴스가 해석한 정도의 크기로 변화할 때, 설계한 센서 브 리지에서 저항과 인덕터 각각의 양단에서 예측되
는 전압의 크기를 나타내고 있다. 코일의 인덕턴 스가 5.0mH에서 5.5mH로 변화함에 따라, 인덕터 양단의 전압은 86mV에서 91mV로 변화하고, 저항 양단의 전압은 110mV에서 108mV로 변화하고 있 음을 보인다. 따라서 인덕턴스 차이가 0.2mH ~ 0.35mH 인 경우, 전압 차는 2~3mV 정도로 나타나 고 있음을 알 수 있다. 이와 같은 차이의 신호를 증폭 등의 방법으로 조절하여, 기어 축 내의 기어 부 위치 판별과, 기어 부 내의 상대 위치를 알 수 있게 된다.
4.2 센서시스템의 실험
기어 축이 센서부에 진입한 후, 양단에 상대적 으로 위치한 두 센서로부터 획득되는 신호는 제어 기를 통해 신호처리를 하게 되고, 이를 이용하여 기어 축의 길이 방향과 각도 방향의 위치 제어에 활용하게 된다. 센서의 동작을 검증하고자 수행한 실험에서는 센서 회로부의 특정 위치에서 나타나 는 신호를 측정한 결과를 보여주고 있다.
Fig. 12는 센서 브리지 회로에서 기어 축의 실 린더 부가 근접한 센서에 직결된 저항, 그리고 기 어 축의 기어 부에 근접한 센서에 직결된 저항의 각 양단에서 나타나는 전압을 비교하고 있다. 각 각의 결과에서 위의 전압신호는 실린더 부, 아래 는 기어 부에서 나타나는 신호를 보이고 있다. 기 어 축 실린더 부의 신호는 기어 부에서 나타나는 신호에 비하여 진폭이 작게 나타나는 것을 알 수 있다. 각 결과의 아래 신호는 차례로, 기어 이 끝 에 센서가 위치할 때(a), 센서가 기어 이 끝과 이 홈의 중앙 위치에 놓을 때(b), 그리고 센서가 기어 이 홈의 위치에 놓일 때(c) 저항 양단의 전압신호 Fig. 10 Change of effective inductance of inductive
sensor with air gap between coil and cylinder
Fig. 11 Changes of voltage drops at inductor(Vi) and resistor(Vr) in the bridge circuit with inductance of inductor
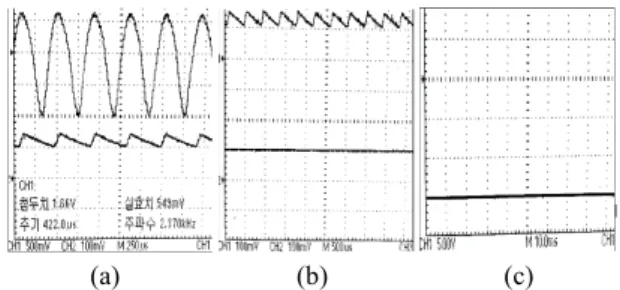
(a) (b) (c) Fig. 12 Voltage drops at resistors in the bridge circuit
with sensor position relative to gear (above, cylinder ; below, gear) (a) at tooth addendum (b) between tooth and space (c) at tooth space
를 나타낸다. 기어 이 끝에 센서가 위치할 때 보 다 이 홈에 위치할 때가 진폭이 크게 나타나게 되 나, 차이가 미소하여, 100mV 스케일로 나타낸 결 과에서 뚜렷하게 인식되지는 않는다. 이는 실린더 와 기어 이 끝의 인덕턴스 차이가 0.2mH, 실린더 와 기어 홈의 인덕턴스 차이가 0.35mH 정도로 나 타나, Fig. 11에서 예측한 바와 같이 2~3mV 내외의 전압 차이가 발생하기 때문이다. 그러나 이와 같 은 미소한 신호 차를 Fig. 3에 보인 바와 같이 다 음 단에서의 차동증폭기로 증폭하거나, 각각의 신 호를 직접 증폭함으로써 다음 결과와 같이 방향과 각도 판별을 위한 신호로 활용될 수 있었다.
Fig. 13은 방향 판별부에서 나타나는 전압신호 를 보이고 있다. Fig. 13(a)는 센서브리지의 저항 양 단전압을 각각 증폭한 것으로 위쪽은 실린더 부, 아래쪽은 기어 부의 신호를 나타내고 있다. 센서 가 고정된 위치에 부착되어 있으므로, 기어 축의 방향이 180o 바뀌어, 실린더 부가 선행하게 되면 위와 아래의 결과는 서로 바뀌어 얻어 질 것이다.
Fig. 13(b)는 각각의 신호를 평활화한 결과로, 니플 이 존재하여 평활화가 정교하게 이루어져 있지 않 지만, 기어 축에서의 신호를 직류화한 결과가 실 린더 부보다 뚜렷하게 크게 나타나는 결과를 얻을 수 있었다. 이를 다음 단의 비교기에서 비교하게 된다. 이 때 기어 이에 위치한 센서신호는 비반전 입력단, 실린더에 위치한 센서신호는 반전입력단 에 인가된다. 이로써 기어 축에서 기어의 위치가 선행하는지 또는 후행하는 지의 판별이 가능하다.
판별 결과, 기어 이가 선행하면 low의 신호, 기어 이가 후행하면, high 신호를 발생하며, 제어기는 결 과 신호를 입력 받아 이에 따라 기어 축의 방향을 변경하는 명령을 내리게 된다. 특히 high 신호가
입력되면, 제어기는 그립이 기어를 재차 파지한 직후에, 그립을 180o 회전하게 하여, 기어 축의 방 향을 변경하게 한다.
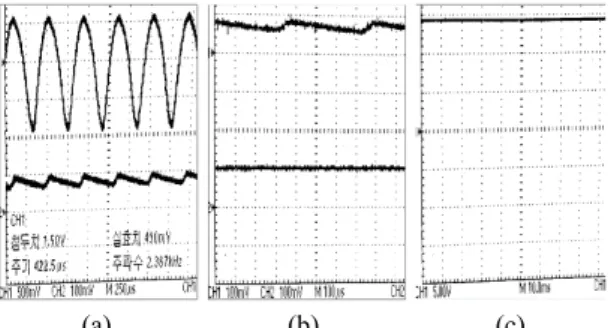
Fig. 14는 기어부에 위치한 센서가 이 홈에 근 접해 있을 때 각도 판별부에서 측정된 결과를 보 여 주고 있다. Fig. 14(a)에서 위는 센서브리지 양단 에 나타나는 비평형 전압 신호를 62배 증폭한 결 과를 보여 주고 있고, 아래는 평활회로를 거친 신 호를 나타낸다.
Fig. 14(b)는 비교기의 두 입력신호를 나타내는 것으로, 위는 평활회로의 출력 신호로 반전입력단 에 인가되고, 아래는 비교기의 설정값으로 비반전 입력 단에 인가된다. Fig. 14(c)는 비교기의 출력신 호로 반전입력단의 신호가 커, 출력이 -15V로 나 타나고 있다. 이는 센서 회로의 비평형전압이 설 정값 이상이며, 기어의 이 홈 부분이 센서에 근접 한 경우에 해당한다. 비교기에서는 실린더 부에서 나타내는 신호와 기어 부에서 나타나는 신호 차가 100mV 이상이면, 기어 부에 위치한 센서는 기어 의 이 홈 부분에 상대적으로 근접해 있음을 나타 낼 수 있도록 비교값을 설정해 두었다.
Fig. 15는 기어부에 위치한 센서가 이 끝에 근 접해 있을 때, 각도 판별부에서 측정된 결과를 보 여 주고 있다. Fig. 15(a)에서 위는 센서가 기어의 이 끝에 위치할 때 센서 브리지 양단에 나타나는 비평형 전압 신호를 증폭한 결과를 보여 주고 있 고, 아래는 평활회로를 거친 신호를 나타낸다. Fig.
15(b)는 비교기의 두 입력신호를 나타내는 것으로, 위는 평활회로의 출력 신호이며, 아래는 비교기의 설정값이다. Fig. 15(c)는 비교기의 출력신호로, 15V 로 나타나고 있다. 이는 비평형전압이 설정값 이 (a) Amplifier (b) Rectifier
Fig. 13 Voltage signals after amplifier and rectifier (above, gear; below, cylinder)
is positioned near to tooth space (a) at amplifier(above) and rectifier(below) (b) at comparator input terminal(above, signal; below, reference) (c) at comparator output terminal
하로, 센서가 기어의 이 끝 부에 근접해 있음을 나타낸다. 이 신호는 제어기에 입력되어 기어 이 의 중앙 위치 판별에 활용된다. 센서의 신호는 제 어기로 인가되고, 제어기에서는 센서부의 신호를 활용하여 기어 축의 회전 위치를 조절하게 된다.
기어 축에 대한 센서 판별이 끝난 후, 제어기는 필요한 경우 그립에 기어 축의 선행 위치를 변경 하는 신호를 인가하여 선행 방향을 교정하게 된다.
방향 판별과 교정이 완료되면, 기어 축은 테이블 에 의해 이송되고, 파지 척에 거치된다. 본 연구에 서 제작한 기어 축 자동취급시스템에서는 이와 같 은 과정이 정확하게 동작함을 동시에 확인하였다.
5. 결론
본 연구에서는 자동차의 동력전달 부품인 기어 축의 취급자동화를 위하여 기어 축을 인식할 수 있는 유도형 센서시스템을 제안하고 개발하였다.
제안된 센서시스템은 코일과 코어부, 코일의 출력 신호를 조절하는 신호조절부, 신호를 처리하고 교 정신호를 출력하는 마이컴 제어부, 그리고 기어 축의 회전위치를 조절하는 구동부로 구성된다. 센 서는 소재의 표면 형상에 따라 나타나는 인덕턴스 의 변화를 측정하는 원리를 적용한 바, 실험적으 로 수행한 측정 결과에 대한 분석을 위하여, 제안 된 센서 코일과 소재 사이의 인덕턴스 변화를 해 석적으로 예측하였다. 센서를 이용한 측정 시험에 서는 센서에 상대적으로 근접한 기어 축의 표면 형상에 따른 센서 신호의 변화를 측정하여, 센서
서 기어가 가공된 부분을 인식하고 동시에 기어 부의 상대적 회전 위치를 동시에 판별이 가능함을 보였다.
후 기
이 논문은 2013년도 경남과학기술대학교 기성 회연구비 지원에 의하여 연구되었습니다.
참고문헌
1. Ostwald, P. F. and Munoz, J., “Manufacturing Processes and Systems,” John Wiley & Sons, pp.
520-533, 1997.
2. Kim, J. -S. and Kim, S. -H., “A Development of Displacement Measurement System using Ultrasonic Sensor,” Proc. of the Annual Conference, The Korean Institute of Electrics Engineers, pp. 142-145, 1995.
3. Park, J. -S. and Jeong, K. -W., “Characteristics of the Laser Displacement Sensor Using Optical Triangulation Method,” J. Korean Soc. Precis. Eng., Vol. 16, No. 7, pp. 40-50, 1999.
4. Kim, J. -H., Ahn, H. -J., and Jang, D. -Y., “A Novel Cylindrical Capacitive Sensor for both Radial and Axial Motion Measurement,” J. Korean Soc. Precis.
Eng., Vol. 22, No. 6, pp. 30-39, 2005.
5. Kim, J. -A, Kim, J. -W., Eom, T. -B., and Kang, C. -S.,
“Development of a Signal Conditioning Circuit for Capacitive Displacement Sensors and Performance Evaluation,” J. Korean Soc. Precis. Eng., Vol. 24, No.
9, pp. 60-67, 2007.
6. Tumanski, S., “Induction Coil Sensors - a Review, Measurement Science Technology,” Vol. 18, No. 3, pp. R31-R46, 2007.
7. Jung, J. -H., Choi, J. -H., and Baek, Y. -S., “Inductive Sensor for the Measurement of a Lateral Rail Displacement,” Proc. of the Korean Society of Mechanical Engineers Annual Conference, pp. 1020- 1023, 2009.
(a) (b) (c)
Fig. 15 Voltage signals at parts of circuits when sensor is positioned near to tooth addendum (a) at amplifier(above) and rectifier(below) (b) at comparator input terminal(above, signal ; below, reference) (c) at comparator output terminal
9, 2002.
12. CEDRAT “Flux2D User's Guide,” version 7.40, 2000.