J. Kor. Soc. Fish. Tech., 46 (1), 020 031, 2010 DOI:10.3796/KSFT.2010.46.1.020
Dynamic behavior of a submersible fish cage rigged with a circular floating and a sinking collar
Chun-Woo LEE*, Jihoon LEE1, Moo-Youl CHOE2and Gun-Ho LEE3
*Division of Marine Production System Management, Pukyong National University, Busan 608-737, Korea
1Institute of Low-Carbon Marine Production Technology, Pukyong National University, Busan 608-737, Korea
2Department of Fisheries Physics, Pukyong National University, Busan 608-737, Korea
3Fisheries Engineering Division, National Fisheries Research and Development Institute, Busan 619-705, Korea
In this research, the submersible fish cage was designed to avoid structural and biological damage during harsh sea conditions. The submersible cage system consists of netting, mooring ropes, a floating collar, floats, sinkers and anchors. Whole elements of the cage were modeled on the mass-spring model. The computer simulations were carried out to investigate the dynamic behavior of the cage and to calculate mooring line tension subjected to tidal currents and waves. As expected, the tension values in the mooring line of the submerged position are 36% less compared to that of the surface cage under the same loading conditions. As the wave was used in combination with the current velocity of 1m/s, the average tensile load for the submerged cage showed 85% of the value for the floating cage. The simulation results provide an improved understanding of the behaviors of the structure and valuable information on the optimized design of the cage system exposed to open ocean environmental factors.
Key words: Submersible fish cage, Underwater flexible structures, Dynamic simulation, Sinking collar, Floating collar
*Corresponding author: [email protected], Tel: 82-51-629-5891, Fax: 82-51-629-5886
,
.
.
,
.
.
.
.
.
,
.
PE
(floating collar) .
,
,
(sinking
collar) .
.
, , , , ,
(floating collar) (sinking
collar)
,
.
. Kim et al. (2002)
, Tsukrov et al. (2003, 2005) (finite element method)
, Fredriksson et al. (2003, 2007)
, Lader and Fredheim (2006)
3 . ,
Huang et al. (2006)
, Thomassen (2008)
, Lee et al. (2008)
, Kim (2009)
.
, Kim (2007)
, Li et al. (2006) Huang et al. (2007)
, Zhao et al. (2007) 3
. ,
,
,
.
,
,
.
(Lee et al., 2008)
.
, .
, ,
(Lee and Cha, 2002; Lee et al., 2005).
,
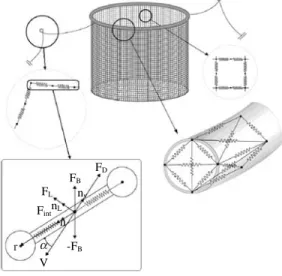
(Fig. 1).
.
.
.
, .
PE
.
.
.
, ,
.
Fig.1
,
Fig. 1. Modeling of the fish cage net, the mooring line and the floating collar.
FD
nv
FB
FL
FintnL
V -FB
n α r
.
,
. ,
.
,
.
.
(m Δm)¨q Fint Fext (1)
m , Δm , ¨q
, Fint , Fext
. .
Δm ρWVnCm (2)
ρW , Vn , Cm
.
.
,
.
. .
Fint n___ ( | r |EA l0) (3) l0
E (young modulus), A
, l0 , n
, | r | .
, , .
Fext FD FL FB (4)
.
FD ___ C1 DρwSV2nv (5) 2
FL ___ C1 LρwSV2nL (6) 2
CD , S , V
, nv
, CL , nL
.
(V r) V
nL ____________ (7)
| (V r) V | r
.
V Vm,
Vc
Vw .
V Vm Vc Vw (8)
, . ,
(Lee et al., 2005; Kim et al.,
2007). .
FB (ρi ρw)Vng (9)
ρi , g .
4
Runge kutta .
.
25m 15m
PE 370mm, 20mm
, 480
.
71,712N ,
19,772N 20,781N .
DYNEEMA .
22.5mm,
1.8mm , 2,326,872
6,314 .
Table 1 .
Table 1. Physical characteristics of calculation parameters of the cage system
Items Specifications
Floating collar Material
Diameter of tube (mm) Thickness of tube (mm) Total buoyancy (N) Diameter of collar (m) Sinking collar
Material
Diameter of tube (mm) Thickness of tube (mm) Total sinking force (N) Diameter of collar (m) Netting
Material Density (g/cm3) Twine diameter (mm) Mesh size (mm) Total mass (kg) Mooring lines
Material Diameter (mm) Buoys
Material Size (m) Buoyancy (N) Number of pieces
PE 370 20 71,712 28
PE 370 20 20,781 25
DYNEEMA 0.96 1.8 22.5 576.9
PES 50
Plastic 1.7262 1.15 19,600 4
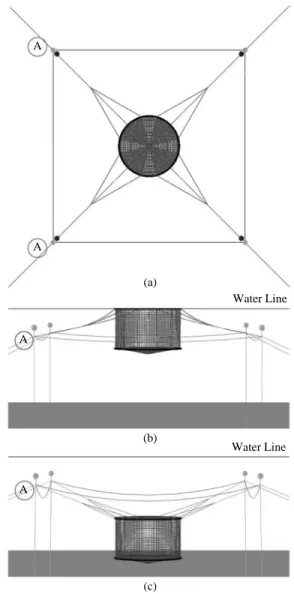
Fig. 2. The top view (a) and the side views of the fish cage in still water (b) at the surface position and (c) at the submerged position. A: referenced point for the tension values.
A
A
A
A
Water Line (a)
(b)
(c)
Water Line
Table 2 .
Fig. 2 .
.
15.2kg 7.6kg .
20m
.
( 20m) 0.5m/s,
1m/s Fig. 3 4
.
, .
, .
0.5m/s .
0.5m/s 16.35m , 1m/s
Table 2. Simulation conditions of the fish cage
Case 1 Case 2 Case 3
Surface
Floating collar position Surface
Submerged (20m below the surface)
Current (m/s) 0.5, 1 1 0.8
Height (m) 6 6
Wave Period (sec) 20 10
Length (m) 156 156
Breaking strength of the
5 5.5 mooring line (ton)
Fig. 3. The side views of the floating fish cage in surface position when the uniform tidal currents of (a) 0.5m/s and (b) 1.0m/s are applied.
Fig. 4. The side views of the floating fish cage in sub- merged position when the uniform tidal currents of (a) 0.5m/s and (b) 1.0m/s are applied.
Water Line
(a) 0.5m/s
(a) 0.5m/s (b) 1.0m/s
(b) 1.0m/s
Water Line
Water Line
Water Line
15.86m
.
. ,
,
.
,
.
A Fig. 5
. ,
,
. ,
36%
.
.
,
.
,
.
, .
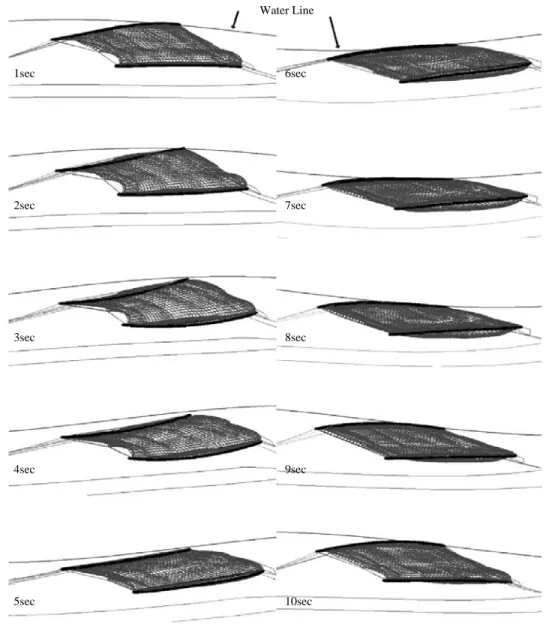
Fig. 6 7 .
6m, 20
sec, 156m , 1m/s .
, .
6m .
,
.
, 36%
.
,
.
. DeCew et al. (2005) Huang et al. (2008)
Fig. 5. Variations in tension acting on the upper side mooring line at the point A in fig. 2 for the cage at the surface and submerged positions under different environmental loading conditions.
140
120
100
80
60
40
20
0
100 120 140 160 180 200 220 240 260 280 Time (sec)
0.5m/s surface 0.5m/s submerged 1.0m/s suface 1.0m/s submerged
Tension (kN)
.
, ,
Fig. 8
.
5
5.5 ,
, 0.8m/s, 6m,
10sec, 156m .
,
Fig. 6. Successive side shapes of the cage at surface position when current of 1.0m/s and waves (height: 6m, period: 20sec and length: 156m) are applied simultaneously.
Water Line
1sec
2sec
3sec
4sec
5sec
6sec
7sec
8sec
9sec
10sec
5.5 .
,
.
.
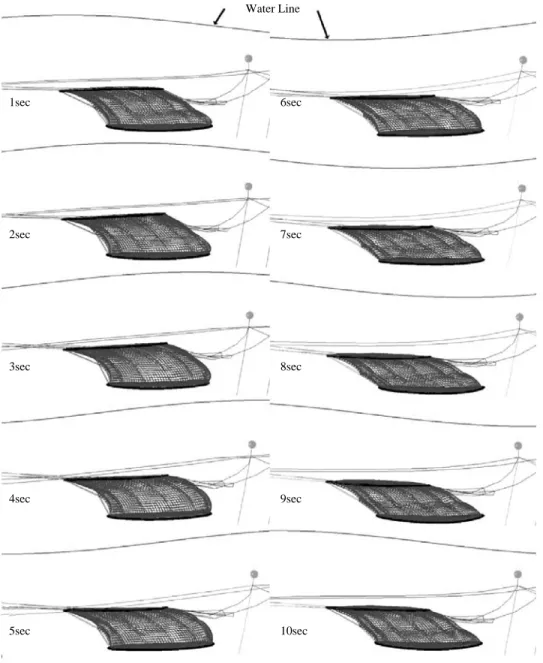
Fig. 7. Successive side shapes of the cage at submerged position when current of 1.0m/s combined with waves (height: 6m, period: 20sec and length: 156m) are applied.
Water Line
1sec
2sec
3sec
4sec
5sec
6sec
7sec
8sec
9sec
10sec
.
. ,
36% ,
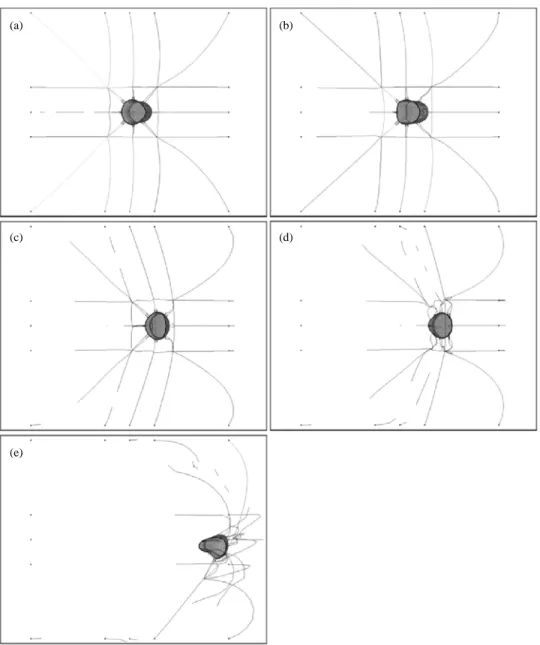
Fig. 8. Simulation of fatal damage by breaking the mooring lines of the cage due to strong current (0.8m/s) and waves (height:6m), (a): start to breaking the mooring line, (b) (d): increased loads transferred to the remaining lines and breaks one by one, (c): whole system swept away.
(a)
(c)
(e)
(d) (b)
.
.
.
2006
(PS-2006-027) .
DeCew, J., D.W. Fredriksson, L. Bugrov, M.R. Swift, O.
Eroshkin and B. Celikkol, 2005. A case study of a modified gravity type cage and mooring system using numerical and physical models. IEEE Jouranl of Oceanic Engineering, 30 (1), 47 58.
Fredriksson, D.W., M.R. Swift, J.D. Irish, I. Tsukrov and B. Celikkol, 2003. Fish cage and mooring system dynamics using physical and numerical models with field measurements. Aquacultural Engineering, 27, 117 146.
Fredriksson, D.W., J.C. DeCew and I. Tsukrov, 2007.
Development of structural modeling techniques for evaluating HDPE plastic net pens used in marine aquaculture. Ocean Engineering, 34, 2124 2137.
Huang, C.C., H.J. Tang and J.Y. Liu, 2006. Dynamical analysis of net cage structures for marine aquaculture: Numerical simulation and model testing. Aquacultural Engineering, 35, 258 270.
Huang, C.C., H.J. Tang and J.Y. Liu, 2007. Modeling volume deformation in gravity-type cages with distributed bottom weights or a rigid tube sinker.
Aquacultural Engineering, 37, 144 157.
Huang, C.C., H.J. Tang and J.Y. Liu, 2008. Effects of waves and currents on gravity type cages in the
open sea. Aquacultural Engineering, 38, 105 116.
Kim, H.Y., C.W. Lee, J.K. Shin, H.S. Kim, B.J. Cha and G.H. Lee, 2007. Dynamic simulation of the behavior of purse seine gear and sea-trial verification.
Fisheries Research, 88, 109 119.
Kim, T.H., C.R. Ryu and D.A. Kim, 2002. Analaysis on deformation and stiffness of frame structure for fishery using finite element methods. Bull. Korean Soc. Fish. Tech., 38 (4), 307 316.
Kim, T.H. and K.U. Yang, 2007. Numerical analysis on the submerging characteristics of submersible fish cage system operated by compressed air. J. Kor.
Soc. Fish. Tech., 43 (1), 38 48.
Kim, T.H., 2009. Design of fish cage structures.
Chonnam Univ. Press, Korea, pp. 40 183.
Lader, P.F. and A. Fredheim, 2006. Dynamic properties of a flexible net sheet in waves and current-a numerical approach. Aquacultural Engineering, 35, 228 238.
Lee, C.W. and B.J. Cha, 2002. Dynamic simulation of a midwater trawl system s behavior. Fisheries Science 68, 1865 1868.
Lee, C.W., J.H. Lee, B.J. Cha, H.Y. Kim and J.H. Lee, 2005. Physical modeling for underwater flexible systems dynamic simulation. Ocean Engineering, 32, 331 347.
Lee, C.W., Y.B. Kim, G.H. Lee, M.Y. Choe, M.K. Lee and K.Y. Koo, 2008. Dynamic simulation of a fish cage system subjected to currents and waves. Ocean Engineering, 35, 1521 1532.
Li, Y.C., Y.P. Zhao, F.K. Gui and B. Teng, 2006.
Numerical simulation of the hydrodynamic behaviour of submerged plane nets in current. Ocean Engineering, 33, 2352 2368.
Thomassen, P., 2008. Methods for dynamic response analysis and fatigue life estimation of floating fish cages. Ph. D thesis. Institute of Marine Technology NTNU, Trondheim, Norway. pp. 218.
Tsukrov, I., O. Eroshkin, D.W. Fredriksson, M.R. Swift and B. Celikkol, 2003. Finite element modeling of
net panels using a consistent net element. Ocean Engineering, 30, 251 270.
Tsukrov, I., O. Eroshkin, W. Paul and B. Celikkol, 2005.
Numerical modeling of nonlinear elastic components of mooring system. IEEE Journal of Oceanic Eng., 30 (1), 37 46.
Zhao, Y.P., Y.C. Li, G.H. Dong, F.K. Gui and B. Teng, 2007. Numerical simulation of the effects of
structure size ratio and mesh type on three- dimensional deformation of the fishing-net gravity cage in current. Aquacultural Engineering, 36, 285 301.
2009 11 24
2010 1 8 1
2010 1 12