*정회원, 울산대학교 전기공학부
**준회원, 울산대학교 전기공학부
***정회원, 울산대학교 전기공학부(교신저자)
접수일자 2016년 10월 17일, 수정완료 2016년 12월 17일 게재확정일자 2017년 2월 3일
Received: 17 October, 2016 / Revised: 17 December, 2016 / Accepted: 3 February, 2017
***Corresponding Author: [email protected]
Dept. of Electrical Electronic Engineering, University of Ulsan, Korea
https://doi.org/10.7236/JIIBC.2017.17.1.69
JIIBC 2017-1-9
블루투스 스마트 기반의 내비게이팅 시스템
Application of Navigating System based on Bluetooth Smart
이영두
*, 잔 사나 울라
**, 구인수
***YoungDoo Lee
*, Sana Ullah Jan
**, Insoo Koo
***요 약 블루투스 스마트로 알려진 Bluetooth Low Energy(BLE)는 초저전력으로 동작하도록 설계되어 BLE 기반 디 바이스들은 그 구성에 따라 하나의 코인셀(coin cell)로 몇 년간 동작이 가능하다. 또한 BLE는 수신신호세기 정보를 기반으로 두 BLE 디바이스 사이의 근사적 거리를 추정 할 수 있다. 이러한 특징으로 인하여 실내 또는 실외의 근거리 영역에서 GPS보다 상대적으로 높은 정밀도의 내비게이션 서비스를 제공 할 수 있다. 본 논문에서는 BLE를 이용한 실 제 내비게이션 테스트 베드를 구성하고 실외 근거리 영역에서의 동작을 검증한다. 검증 실험에서 BLE 기반의 비콘들 은 고정된 위치에 설치되어 주기적으로 Universally Unique IDentifier(UUID) 전송하며, 사용자 스마트 디바이스는 이 를 수신하여 거리값을 추출하고 UUID를 셀룰러 또는 와이파이 망을 통해 데이터베이스로 전송한다. 데이터베이스는 해당 UUID에 바인딩된(binding) 관련 정보를 사용자 디바이스에 피드백하고, 이를 수신한 사용자 디바이스는 추출된 거리값과 함께 주변 정보 및 지도상에서 사용자 위치를 더욱 정밀하게 표시하는 내비게이션 서비스를 제공한다. 본 논 문을 통하여 BLE 기반의 내비게이팅 응용이 실현 가능함을 확인할 수 있으며, 더 나아가 이러한 시스템이 실내 내비 게이션으로도 충분히 구현될 수 있음을 확인 할 수 있다.
Abstract
Bluetooth Low Energy (BLE), also known as Bluetooth Smart, has ultra-low power consumption; in fact, BLE-enabled devices can run on a single coin cell battery for several years. In addition, BLE can estimate the approximate distance between two devices using the Received Signal Strength Indication (RSSI) feature, enabling relatively precise navigation in indoor and small outdoor areas where GPS is not an option. In this paper, an experimental setup is presented in which BLE is used for navigation within a small outdoor area. BLE-based beacons are installed in fixed positions, which periodically transmit a universally unique identifier (UUID). A smart device receives the UUID and sends it to a database server using cellular or Wi-Fi technology. The server returns fixed position information corresponding to the received UUID codes, and the smart device uses that information to compute its current position based on relative signal strengths, and display it on a map. These results demonstrate the successful application of BLE technology for navigation in small outdoor areas. This system can be implemented for indoor navigation as well.Key Words :
Bluetooth Low Energy (BLE), Navigation system, Indoor Positioning, Received Signal Strength Indication (RSSI)Ⅰ. Introduction
Bluetooth Low Energy (BLE), or Bluetooth Smart, is designed for very low-power devices, which can run for months or even years powered only by small batteries such as coin cells.
[1]It was included in Bluetooth specification version 4.0 in 2010 by the Bluetooth Special Interest Group (SIG).
[2]Compared to previous Bluetooth flavors, BLE has a smaller data rate and lower power consumption, providing a platform for applications which require infrequent, low-volume data communication.
[3,4]This low-latency technology has a range of nearly 150 m in an open field with an output power of 10 mW, but obstacles in the path such as buildings, trees, or pedestrians may reduce its range.
Using a star topology, Bluetooth Smart has the ability to connect more than 2 billion devices simultaneously with a single master and all others configured as slaves.
[1]Bluetooth Smart utilizes the 2.4 GHz ISM band like Bluetooth classic which is for unlicensed use worldwide. It divides the frequency spectrum into 40 channels with 2 MHz of bandwidth per channel; 3 channels are selected for advertising so that the most common Wi-Fi channels are avoided, while the other 37 channels are used for data transfer once a connection is established. An adaptive frequency-hopping mechanism is adopted with a higher time restriction than Bluetooth classic.
[5]This technology has several modes such as broadcast, connection, event data reading and writing, etc., which make it a leading candidate for the emerging Internet of Things (IoT). The BLE protocol has a low data throughput of 1 Mbps, suitable for applications like temperature sensing which require only small periodic data transfers rather than a long and/or sustained data stream. Manufacturers have already started to incorporate this technology into smart devices, and in the future almost all devices will include BLE.
Meanwhile, demand for location-based services on smart devices increases every day as users can connect to networks anywhere. Global Positioning Systems
(GPS) are useful for outdoor navigation, with an uncertainty of about 10 meters.
[6]This error is acceptable for a wide area such as a big city, but cannot be neglected within a small area such as a supermarket, park, or museum. Furthermore, GPS does not work indoors. A more accurate system is therefore needed, which can provide precise positioning in small outdoor and indoor settings.
BLE has the ability to provide proximity information using received signal strength indication (RSSI).
[7]Proximity is defined as the closeness of two objects, as opposed to location which refers to a fixed position such as geographical coordinates, street numbers, cities or even countries. Moreover, unlike GPS it can also provide data-based services utilizing beacon IDs and online servers. Such abilities make BLE beacons an attractive choice for indoor as well as outdoor positioning within a small area.
In this paper, we use BLE as a navigation system within the University. Fixed beacons broadcast their media access control (MAC) addresses and universally unique identifiers (UUID) as ID information. The smart device of the user receives the MAC addresses and UUIDs, and using RSSI information calculates its location by approximating its relative distance from beacons installed in fixed positions.
This paper is organized as follows. Section II provides some related works to indoor and small area navigating systems. The system design, hardware and mobile application information used in our project are detailed in Section III. Finally, concluding remarks are provided in Section IV.
Ⅱ. Related Works
Indoor and outdoor positioning has been broadly
investigated using various positioning technologies in
recent years. General approaches can be divided into
two main strategies: centralized and distributed.
[8]In
centralized positioning, a server estimates the position
of nodes by receiving information packets from nodes
through a multi-hop network of anchor nodes. In distributed positioning, nodes estimate their own position after receiving packets from anchor nodes with fixed physical coordinates.
The most common positioning algorithms are trilateration, triangulation, scene analysis (or fingerprinting) and proximity based.
[9-12]The trilateration algorithm estimates the position of a point by measuring its distance from three fixed points with known coordinates. The triangulation algorithm differentiates itself from trilateration as angles, in addition to distance, with respect to fixed points are measured. Scene analysis obtains unique characteristics such as IDs from transmitters installed at fixed points in the scene and compares them with an existing database available to the device. This technique consists of two stages: an offline stage and an online stage. In the offline stage, position estimation data from different places is collected and stored in a database. In the online stage, data is obtained and compared with the information in the database to estimate the position. The proximity algorithm uses fixed antennas with well-known positions. When a mobile device is detected by an antenna, it is positioned by that antenna; when detected by more than one antenna, position is determined by the antenna with the strongest signal. Gu et al.
[12]present a detailed explanation of different positioning algorithms and mediums used in those algorithms.
Liu et al.
[9]and Gu et al.
[12]presented criteria for evaluating indoor positioning systems, including security and privacy, cost (in terms of expenses, time, and space), performance, robustness, complexity, user preferences, commercial availability, and limitations.
Furthermore, Gu et al.
[12]classified positioning systems on the basis of the medium used for data communication, including infrared (IR) technology, ultrasound, radio waves, magnetic signals, vision-based technology, and audible sound technology. According to the authors, none of these technologies satisfies the system requirements of performance and cost by itself, but a combination of more than one technology could. Of all
the indoor positioning techniques, location fingerprinting is the most effective.
[13]Li et al.
[14]conducted an experiment testing fingerprinting for outdoor positioning in the Sydney CBD area over Wi-Fi, with positive results. Kang et al.
[15]used LED QR codes for indoor positioning. A smart terminal scanned and extracted information including the current position from LED QR codes at various locations.
Berbakov et al.
[16]proposed an autonomous indoor positioning system using motion sensors in combination with a magnetometer and barometer, and experiments showed up to 98% accuracy with a step detection algorithm and constant step size. A similar approach was proposed by Pei et al.
[17]using a Multi-Sensor Positioning (MSP) device. MSP incorporates a GPS receiver and inertial sensors including accelerometers, a digital compass, and inclinometers. The inertial sensors are used for positioning when GPS signals are lost. Pei et al.
[17]also proposed satellite- and terrestrial-based positioning solutions. The satellite-based solution estimates the distance with the help of signals received from a network of medium-earth-orbit satellites. The terrestrial-based solution uses terrestrial radio signals such as WLAN for position estimation in GPS-blocked areas without MSP.
Ⅲ. System Design
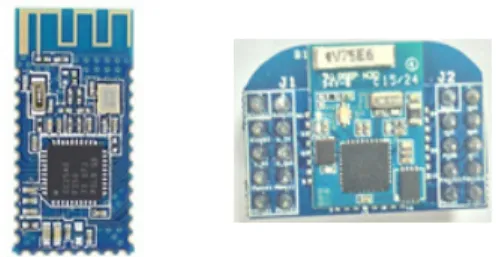
In this section, we describe the hardware and software implementations used in our experiment. Two different modules with Bluetooth Spec. V4.0 BLE were used as BLE beacons as shown in Fig. 1.
그림 1. 실험에 사용된 BLE 모듈
Fig. 1. BLE modules used in experiment
The small size of the modules makes their deployment easy and universal. The AT commands required to operate BLE modules in beacon mode are as Table 1.
Order AT command Order AT command
1 AT+RENEW 7 AT+NAMEMCSL
2 AT+RESET 8 AT+ADTY3
3 AT 9 AT+IBEA1
4 AT+MARJ0x1234 10 AT+DELO2
5 AT+MINO0x5678 11 AT+PWRM0
6 AT+ADVI5 12 AT+RESET
표 1. BLE 모듈 구동을 위한 AT 명령어
Table 1. AT commands for operating BLE module
The details for each command are given below
1. AT+RENEW
This command restores the factory default settings of the module.
2. AT+RESET
This command reboots the module.
3. AT
This command is used to check the connectivity of the module to the computer. If connected, the module will return “OK”. This command can also be used to check connectivity to a remote device. If the module is not connected to a remote device “OK” will be received, otherwise the connection will be lost.
4. AT+MARJ0x1234
This command sets the 2-byte major number of the module to 1234 (hexadecimal). The module will reply with “OK+Set” upon successful setting.
5. AT+MINO0x5678
This command sets the 2-byte minor number of the module to 5678 (hexadecimal).
6. AT+ADVI5
This command sets the advertising interval. In this
example, the interval is set to 546.25 ms. This interval can be set between a minimum of 100 ms and a maximum of 7000 ms.
7. AT+NAMEMCSL
This command is used to set the module name to MCSL.
8. AT+ADTY3
This command sets the advertising mode of the module. The module has 4 advertising modes:
1) Advertising, scan response, connectable.
2) Only allow last device connected in 1.28 seconds.
3) Only allow advertising and scan response.
4) Only allow advertising.
ADTY3 is used to set the only allow advertising mode.
9. AT+IBEA1
This command turns on beacon mode.
10. AT+DELO2
The module can have broadcast and scanning enabled, or broadcast only using this command. DELO2 only allows broadcast mode.
11. AT+PWRM0
This command turns on auto-sleep mode to reduce power consumption.
In addition, the default UUID of the module can be altered by entering AT+IBE0, AT+IBE1, AT+IBE2 and AT+IBE3 commands. The UUID is a universal 16-byte ID which is different for each beacon. It is divided into 4-byte partitions, and each one is altered using the commands IBE0 to IBE3, respectively.
Ⅳ. Demonstration
1. Hardware
그림 2. BLE 모듈 기반의 하드웨어 구성도
Fig. 2. Hardware diagram based on BLE module
The circuit diagram of the module hardware is shown in Fig. 2. The switch SW 1 is used to turn the BLE module circuit on and off. The switch SW 2 and LED are connected in parallel to the BLE module. This LED indicates the on or off state of the BLE module if SW 2 is closed. Since the energy consumed by the LED can dramatically reduce the lifetime of the battery, it is connected in parallel with a separate switch to disable the LED if not needed. Fig. 3 shows the hardware circuitry of the beacon modules.
그림 3. BLE 모듈 기반의 하드웨어 구성도
Fig. 3. Hardware circuitry of BLE modules used in experiment
2. Application
그림 4. 시스템 모델
Fig. 4. System model for application
The main objective of the smart-device application (app) is to implement a navigation service and display BLE beacon positioning and local information. A model of the system is shown in Fig. 4, showing that main functions are controlled by the app on the smart device.
The app IDE is Android Studio 1.4 with JRE 1.7.0_79-b15. There are three data streams. Two are unidirectional, from GPS and low-energy Bluetooth to the smart device. The third is bidirectional, between the smart device and database (DB) server consisting of Apache 2.2.14, PHP 5.2.12, and MySQL 5.1.39. For this connection, LTE, 3G, Wi-Fi, etc. can be used. In the system mode, the app collects location and local information by sending instructions to the GPS and Bluetooth modules, and communicates with the DB server through the internet.
그림 5. 앱 구성도
Fig. 5. Component diagram of app
The component diagram of the app is shown in Fig.
5. It is comprised of two service classes and four function classes. The image function class shows local views around points on the map. The device function class drives GPS and Bluetooth modules equipped on the smart device. The map function class displays the map picture and specific points required for navigation through the Naver map API. The DB function class sends the DB server the beacon ID obtained by the device function class and delivers local information from the DB server to the map function class for displaying.
To better show operations of the services, we use a
scenario where user wants to visit the building 7
(school of electrical and computer engineering) from
the main gate of the university. Two BLE beacons are used for this scenario and installed on the building 3 and 7, which is shown in Fig. 6 (a)-(c).
그림 6. (a) 사용된 BLE 비콘들 (b) 3호관에 설치된 비콘 (c) 7호관에 설치된 비콘
Fig. 6. (a) BLE beacons (b) Beacon installed on building 3 (c) Beacon installed on building 7
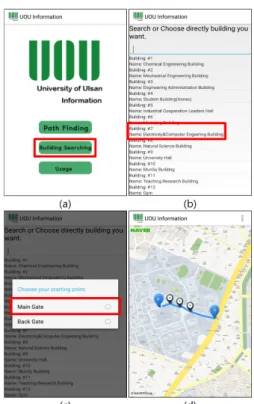
1) Navigation service
When starting the app, the navigation service class (NSC) is called and the user sees the main menu as shown in Fig. 7 (a). After selecting the Path Finding icon, the user chooses the target building in the given list and the starting point, as shown in Fig. 7 (b) and (c). At this time, the NSC calls the map function class (MFC) to display a path to the location chosen by the user as in Fig. 7 (d), where ‘S’ and ‘E’ indicate the start and end points, respectively.
As shown in Fig. 8 (a) and (b), the user can check the local view by touching any of the given points on the map. For this, the NSC calls the image function class (IFC) to retrieve the corresponding picture. The IFC then sends the result to MFC in order to display it, as depicted in Fig. 5. If the user recognizes the current point on the map without the help of GPS, he/she can directly move to the target building.
To display the current position via GPS, the user accesses the submenu, as shown in Fig. 9 (a) and (b).
In this operation, the NSC calls the device function class (DFC) to enable the GPS module on the smart device and read the current position. The DFC then sends the information to the MFC for display.
그림 7. (a) 메인 액티비티 (b) 대상 건물 리스트 (c) 출발 지 점 선택 (d) 목표지점까지의 경로
Fig. 7. (a) Main Activity (b) Target building list (c) Choice of starting point (d) Path displayed between given points
2) Information notification service
The user can search for information on buildings
using the Building Searching icon in Fig. 7 (a), in
which the NSC activates the Bluetooth module on the
smart device by calling the DFC and sends a control
command to scan for BLE beacons. If the user chooses
an item in the list of scanned beacons, the MFC calls
the DB function class (DB-FC) with the ID of the
selected beacon. The DB-FC connects to the DB server
(assuming an internet connection is available) and
sends an information request with the appropriate
beacon ID. After receiving the building information
corresponding to the beacon ID, the DB-FC delivers it
to the MFC to display. Consequently, the user can find
information of nearby buildings and their distances
from the current position. All of these operations are
shown in Fig. 10 (a)-(d).
Ⅴ. Conclusion
BLE-based beacons have emerged as an attractive technology for the IoT world. Features such as a long lifetime, relative positioning, data-based services, etc.
that BLE beacons have make them useful in home networks as well as larger networks for commercial and industrial applications. For this paper, we designed and implemented a Bluetooth Smart-based navigation system in hardware and software at the University, Korea. BLE beacons, installed at fixed positions, broadcasted their unique UUIDs periodically to any devices in range. The smart device retrieved positioning information by sending those UUIDs to a DB server through cellular or Wi-Fi technology. The information from the DB server was then used to display the current position on a smart phone running a dedicated app. This work demonstrates the possibility of using BLE beacons for navigation and one approach to related app development.
References
[1] J. Decuir, “Introducing Bluetooth Smart Part 1: A look at both classic and new technologies”, IEEE Consumer Electronics Magazine, pp. 12-18, 2013.
DOI: http://dx.doi.org/10.1109/mce.2013.2284932 [2] C. C. Jia Liu, Yan Ma, Ying Xu, “Energy analysis of
device discovery for Bluetooth low energy”, IEEE 78th Vehicular Technology Conference (VTC Fall), 2013.
DOI: http://dx.doi.org/10.1109/vtcfall.2013.6692181 [3] Byungho Cho, “Design of Restaurant Advertisement
and Order System using Bluetooth 4.0 Technology”, The Journal of The Institute of Internet, Broadcasting and Communication, VOL. 15, NO. 1, pp.69-76, 2015.
DOI: http://dx.doi.org/10.7236/jiibc.2015.15.1.69 [4] Sang-Min Park, and Chul-Jin Kim, “A Dual
Security Technique based on Beacon”, Journal of the Korea Academia-Industrial cooperation Society, VOL. 17, NO. 8, pp.311-317, 2016.
DOI: http://dx.doi.org/10.5762/KAIS.2016.17.8.311
[5] J. Liu, C. F. Chen, and Y. Ma, “Modeling neighbor discovery in Bluetooth low energy networks”, IEEE Communications Letters, vol. 16, no. 9, pp.
1439-1441, 2012.
DOI: http://dx.doi.org/10.1109/lcomm.2012.073112.
120877
[6] C.-H. L. Chung-Ming, Wei-Shuang Chen, “A power efficient pedestrian touring scheme based on sensor-assisted positioning and prioritized caching for smart mobile devices”, IEEE 21st International Conferene on Software, Telecommunications and Computer Networks (SoftCOM), 2013.
DOI: http://dx.doi.org/10.1109/softcom.2013.6671848 [7] M. S. Gast, “Building Applications with iBeacon,
Proximity and Location Services with Bluetooth Low Energy”, O'Reilly Media, Inc., 2014.
[8] T. D. H. Ville Kaseva, Marko Hannikainen, “Positioning in synchronized ultra low-power wireless sensor networks”, Journal of Global Positioning Systems, vol. 10, no. No. 1, pp. 50-66, 2011.
DOI: http://dx.doi.org/10.5081/jgps.10.1.50 [9] H. D. Hui Liu, Pat Banerjee and Jing Liu, “Survey
of wireless indoor positioning techniques and systems”, IEEE Transactions on Systems, Man, and Cybernetics-Part C: Applications and Reviews, vol. 37, no. 6, pp. 1067-1080, 2007.
DOI: http://dx.doi.org/10.1109/tsmcc.2007.905750 [10] K. A. N. a. H. Kamel, “A survey of indoor positioning
systems and algorithms”, IEEE International Conference on Innovations in Information Technology, pp.
185-190, 2011.
DOI: http://dx.doi.org/10.1109/innovations.2011.5893813 [11] A. D. M, “A comparative analysis on indoor positioning techniques
and systems”, International Journal of Engineering Research and Applications, vol. 3, no. 2, pp. 1790-1796, 2013.
http://citeseerx.ist.psu.edu/viewdoc/summary?
DOI: http://dx.doi.org/10.1.1.414.6811
[12] A. L. Yanying Gu, and Ignas Niemegeer, “A survey of indoor positioning systems for wireless personal networks”, IEEE Communications Surveys and Tutorials, vol. 11, no. 1, 2009.
DOI: http://dx.doi.org/10.1109/surv.2009.090103
※ This work (Grants No.C0398156) was supported by Business for Cooperative R&D between Industry, Academy, and Research Institute funded Korea Small and Medium Business Administration in 2016.
구 인 수(정회원)
∙1996 : B.E. at Konkuk University, Seoul, Korea.
∙1998 : M.S. at Gwangju Institute of Science and Technology (GIST), Gwangju, Korea.
∙2002 : Ph.D. at Gwangju Institute of Science and Technology (GIST), Gwangju, Korea.
[13] T.-C. W. Mustafa Abdat, Saravanesh Supramaniam,
“Survey on indoor wireless positioning techniques:
towards adaptive systems”, IEEE International Conference on Distributed Framework for Multimedia Applications (DFmA), pp. 1-5, 2010.
DOI: http://ieeexplore.ieee.org/document/5952321/?
reload =true&arnumber=5952321
[14] I. J. Q. Binghao Li, Andrew G. Dempster, “On outdoor positioning with Wi-Fi”, Journal of Global Positioning Systems, vol. 7, no. 1, pp. 18-26, 2008.
DOI: http://dx.doi.org/10.5081/jgps.7.1.18
[15] J. L. Yongsik Kang, Juyoung Lee, Jaesang Cha,
“A study for indoor position detection using LED QR code and smart-terminal”, IEEE International Conference on ICT Convergence, pp. 129-131, 2011.
DOI: http://dx.doi.org/10.1109/ictc.2011.6082565 [16] B. P. L. Berbakov, S. Vranes, “Smart-phone application
for autonomous indoor positioning”, IEEE Internaional Instrumentation and Measurement Technology Conference (I2MTC), pp. 670-674, 2015.
DOI: http://dx.doi.org/10.1109/i2mtc.2015.7151348 [17] R. C. Ling Pei, Yuewei Chen, H. Leppakoski , A.
Perttula, “Indoor/Outdoor seamless positioning technologies integrated on smart phone”, IEEE First International Conference on Advances in Satellite and Space Communications, pp. 141-145, 2009.
DOI: http://dx.doi.org/10.1109/spacomm.2009.12
저자 소개
이 영 두(정회원)
∙2007 : B.S. in School of Electrical Engineering at the University of Ulsan, Korea.
∙2009 : M.S. in School of Electrical Engineering at the University of Ulsan, Korea.
∙2013 : Ph.D. in School of Electrical Engineering at the University of Ulsan, Korea.
∙2013 ∼ : Research Fellow at the University of Ulsan, Korea.
<Research Interests: cognitive radio, underwater acoustic communication, next-generation wireless communication systems>
잔 사나 울라(준회원)
∙2012 : B.S. in Electronic Engineering at International Islamic University, Islamabad, Pakistan.
∙2012 ∼ 2014 : Lab Engineer at University of Lahore, Islamabad Campus, Islamabad, Pakistan.
∙2014 ∼ : M.S./Ph.D. combined program at the University of Ulsan, Korea.
<Research Interests : Wireless Sensor Networks, Visible Light Communications, Bluetooth Low Energy applications>
∙2002 ∼ 2004 : Research professor at Ultrafast Fiber-Optic Networks (UFON) Research Center in GIST.
∙2003 ∼ 2004 : Visiting scholar at Royal Institute of Science and Technology, Sweden.
∙2005 ∼ : Professor in School of Electrical Engineering at University of Ulsan, Korea.
<Research Interests : Next-generation wireless communication systems, wireless sensor networks>