http://dx.doi.org/10.12673/jant.2016.20.3.175
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-CommercialLicense(http://creativecommons .org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received 16 May 2016; Revised 25 May 2016 Accepted (Publication) 22 June 2016 (30 June 2016)
*Corresponding Author; Hyeong-sik Choi Tel: +82-51-410-4297
E-mail: [email protected]
해상 크레인의 상하동요 보상 시스템의 능동제어
A Heave Compensation System for Offshore Crane
성 형 석
1· 최 형 식
2*· 정 성 훈
3· 이 상 기
41한국해양과학기술원-한국해양대학교 해양과학기술전문대학원 해양과학기술융합학과
2한국해양대학교 기계공학과
3한국해양대학교 산업기술연구소
4(주)테크플라워 기술연구소
Hyung-seok Seong
1· Hyeong-sik Choi
2*· Seong-hoon Jeong
3· Sang-ki Lee
41Ocean Science and Technology School, KIOST-KMOU, Busan 49112, Korea
2Department of Mechanical Engineering, Korea Maritime & Oean University, Busan 49112, Korea
3Research Institute of Industrial Technology, Korea Maritime & Oean University, Busan 49112, Korea
4Tech Flower Co., Ltd, Busan 46981 Korea
[요 약]
이 논문에서는 해상에서의 환경 하중과 외력을 고려한 해상 크레인의 상하 동요 보상 시스템에 대해 연구한 내용을 소개한다.
이를 위해 강체라 가정된 해상 크레인과 유압 구동식 윈치, 탄성력을 갖는 로프, 그리고 로프 끝단의 중량물로 구성된 동역학 모델 을 먼저 살펴본다. 중량물의 상하 동요 움직임을 보상하기 위해, PD 제어를 적용했다. PD 제어 결과 진동폭이 줄어듬을 확인할 수 있다. 또한, 해상에서의 외란을 예측하여 시간 지연 값을 갖는 예측값을 활용한 제어 알고리즘을 적용해, 상하동요 폭이 줄어듬을 확인할 수 있다. 결과적으로, 0.1초의 시간 지연값 만을 갖고 있어도 상하동요 보상시스템에서 충분히 제어 알고리즘으로써 활용 할 수 있음을 볼 수 있다.
[Abstract]
This paper introduces a heave compensation system for offshore crane when it gets unexpected disturbances and external force.
The dynamic model consists of crane assumed to be the rigid body, hydraulic driven winch, elastic rope and payload. To keep the payload from moving up and down, PD control algorithm is applied. By using the control, the oscillating amplitude of the payload is reduced. Also by using the estimated values involved with time-delay, the relative motion of payload in heave direction is dramatically shortened. This paper shows using the control algorithm with estimated value having time-delay 0.1 second is enough to heave compensation system.
Key word :
Active heave compensation system, Nonlinear system, Offshore crane, Proportional-derivative control, Time-delay.Ⅰ. 서 론
심해 유전개발을 위한 심해용 해양플랜트의 수요 증가에 따 라 설치수심의 심해화, 설치대상물의 대형화 및 중량화 추세로 접어들었다. 또, 설치물에 대한 유지ᐧ보수 및 수중 탐색 등의 해저 작업에 대한 수요 역시 연근해에서 이제는 수심 3000 m급 심해로 그 범위가 확장되었다. 또한, 극지의 극한 환경에서도 이러한 작업이 요구되고 있다. 이에 따라 이러한 작업에서 운용 되는 해상 크레인의 자세 제어가 중요한 문제로 떠오르고 있다.
해양파, 조류, 바람 등의 다양한 환경하중이 존재하는 해상에서 크레인을 운용할 때, 크레인 끝단의 운동, 즉 중량물의 위치 제 어가 바로 그 문제에 해당한다. 이러한 자세 제어에는 수평 방 향 자세 제어와 수직 방향 자세 제어 두 가지가 있다. 수평 방향 자세 제어와 관련된 문제에는 활발한 연구가 수행되어 왔으나, 수직 방향 자세 제어와 관련한 문제에는 그만큼 활발한 연구가 수행되지 않고 있다.
본 논문에서는 수직 방향 자세 제어 중, 해상 크레인이 유압 구동식 윈치를 이용해 중량물을 바다 속에 내린 경우, 중량물의 위치를 유지하는 제어 방법에 대한 연구를 수행하였다. 관련 연 구 현황을 먼저 살펴본 뒤, 상기의 시스템에 대한 동역학 모델 을 구성한다. 마지막으로 중량물의 위치 유지를 위한 제어를 적 용한 결과를 시뮬레이션 및 결과에서 확인할 수 있다.
Ⅱ. 상하동요 보상 시스템 제어의 선행 연구
해상에서 크레인을 운용할 때에는 다양한 환경 조건들을 고 려해야 하므로, 중량물의 위치를 조절하거나 유지하는 것은 어 려운 일이다. 특히 해상에서 크레인의 상하동요에 따른 움직임 과 바다 속에서 중량물이 역학 관계에 따라 움직이는 문제는 서 로 결합되어 있다. 따라서 중량물의 위치를 제어하기 위해서는 크레인에 영향을 미치는 여러 요소들을 고려한 후, 그 결과가 중량물의 위치에 어떻게 작용하는지를 예측해야 한다. 이러한 상하동요 보상 시스템은 지난 40년간 많은 연구자들 사이에서 공통의 문제로 떠올라 관련한 연구가 진행되었다[1].
2-1 상하동요 보상 시스템에 대한 초기 연구
바다에서의 중량물 위치 제어 문제에서 핵심은 악조건의 해 상에서 선박이 받는 여러 외란들로부터 온다는 연구 결과 발표 이후, 이를 해결하기 위해 수동형 수직 운동 저감 시스템 (PHC;
passive heave compensation)과 능동형 수직 운동 저감 시스템 (AHC; active heave compensation)이 제시되었다. 능동형 상하 동요 보상 시스템은 기계적인 되먹임을 이용해 선박의 진동 폭 을 조절하는 것이었다[2].
이후 1980년대에는 기계적인 AHC 시스템에 관련한 연구가 거의 없었다. 그 이유는 복잡한 시스템을 통합된 모델로 구축하
여 실시간으로 제어하는 컴퓨터의 기술 역량이 부족했기 때문 이다. 동시에, 1980년대에는 석유ᐧ가스 시추 산업에서는 PHC 시스템만으로도 충분했기에, AHC 시스템에 대한 관심과 연구 추진 동기가 줄어들 수밖에 없었다. 그러나 상하동요 움직임을 감지하여 회로 상에서 수직 방향 자세를 제어하는 AHC 시스템 기반의 회로가 개발됨으로써[3], 수중 음파 관련 분야에서는 지 속적으로 AHC 시스템의 이론과 알고리즘 개발에 대한 연구를 진행해나갔다.
수중에서의 음파 신호를 해저로부터 받아 중량물의 위치를 제어하는 이중 적분기 회로가 개발되었다[4]. 이는 기존의 기계 적 되먹임으로 AHC 시스템을 제어하던 방식에서, 전기적인 신 호를 활용하여 제어하는 영역으로 옮겨가는 데에 전환점을 제 공했다. 이러한 수중 음파 신호를 위치 값으로 변환하는 방법은 고속 푸리에 변환 (FFT; fast fourier transform)과 칼만 필터를 활용하여 선박의 움직임을 예측ᐧ분석함으로써 더욱 정교해질 수 있었다[5].
1990년대로 접어들면서, 마이크로프로세서 기반의 AHC 시 스템이 등장했다[6]. 제어 인자를 쉽게 조절할 수 있으며, 다양 한 해상 조건에서 AHC 시스템이 운용 가능해졌다. 이에 따라 AHC 시스템의 활용 범위 역시 넓어지게 되었다[7].
특히 드릴쉽 등이 시추 작업을 수행하는 경우, 선박의 상하 동요 움직임이 드릴 스트링에 미치는 영향을 줄이는 것이 중요 하다. 이는 AHC 시스템의 제어 목적과 동일했기에, AHC 시스 템을 활용하는 관련 연구가 진행되었다[8]. 드릴쉽의 상하동요 움직임으로 인한 영향을 제거함으로써, 드릴스트링과 라이저 의 피로도를 줄이고, 운용 시간을 늘릴 수 있었다. 해당 연구에 서는 선형 모델을 이용하여 동역학 시스템을 완전히 decouple 한 결과를 시뮬레이션 상에서 구현하였다. 이후 AHC 시스템의 실질적인 비선형성을 고려한 모델에 비선형 제어 방법을 적용 해 연구할 필요성이 제기되었고, 이러한 방향으로 연구가 수행 되기 시작했다[9].
2-2 시간 지연을 고려한 예측 모델 기반 제어 연구
외란을 받는 해상 크레인의 상하 움직임을 실시간으로 계측 및 예측하기 위해서 가속도 센서를 이용한다. 중량물은 로프 끝 에 위치해있기에, 센서 및 제어 시스템간의 시간 지연 현상 역 시 AHC 시스템에서는 주요하게 다루는 주제가 된다. 이처럼 시스템 전반에 등장하는 시간ᐧ위상 지연을 조정하기 위한 전 달 함수 필터가 연구되었으며[10], 크레인의 상하동요 위치 값 을 매순간 측정한 뒤, 예측값을 계산하는 예측 모델을 기반으로 한 제어 시스템도 이러한 시간 지연 현상을 극복하는 대안으로 연구되었다[11].
예측 모델을 적용한 제어와 더불어 특정 위치를 유지하는 관 점에서의 제어로써, MPTP (model predictive trajectory planner) 제어 기법이 연구되었으며[12], 최근에는 이와 같은 예측 모델 을 기반으로 한 AHC 시스템 제어 연구가 진행되고 있다.
Ⅲ. 동역학 모델
3-1 동역학 모델의 가정과 좌표 설정
해상 크레인의 상하동요 보상 시스템은 해상크레인과 유압 구동식 윈치, 탄성을 가진 로프, 그리고 로프의 끝단에 위치한 중량물로 구성된다. 해상 크레인은 강체 시스템이며, 유압 구동 식 윈치의 동역학식은 1차 시스템으로 정의한다. 시스템의 상 하동요 움직임만을 예측ᐧ제어하기 때문에, 중량물의 상하 운 동만을 고려한 1차원 시스템으로 가정한다. 같은 이유로 선박 의 동역학에서는 수평 방향 성분에 영향을 미치는 외란은 고려 하지 않는다. 여기서의 상하동요 보상 시스템은 ROV (remotely operated underwater vehicle)와 같은 중량물이 로프 끝단에 매달 려서 깊은 수심에 위치하는 경우, 그 위치를 유지하는 것을 목 표로 한다.
시스템의 좌표는 해수면에서 수직 아래 방향을 양으로 잡으 며, 중량물의 위치 제어가 목적이므로 중량물의 위치를 먼저 변 수로 잡는다. 중량물의 위치는 로프의 길이 함수()와 탄성력에 의한 로프의 길이 변화량(∆), 그리고 외란에 따른 크레인의 수직 운동이 중량물의 위치 변화에 미치는 영향력을 변수로 하 는 를 모두 고려하여 정의한다.
∆ (1)
문제의 상황을 단순화하기 위해, 윈치와 로프는 같은 축 위 에 함께 있다고 가정한다. 이 가정은 기준점의 위치 변화만 고 려하게 되므로 동역학 모델의 성격을 해치지 않는다. 여기서 로 프의 길이는 윈치의 윈치 각도에 종속된 변수이며 다음과 같이 표현된다.
(2)
는 로프의 초기 길이값이며, 은 윈치의 반지름, 그리고
는 윈치의 각변위에 해당한다.
로프는 탄성을 가지며, 탄성계수는 다음과 같다.
(3)
여기서 는 로프의 영률 (young’s modulus)이며 는 로프의 단면적에 해당한다.
중량물의 위치와 관련된 동역학을 구성하기 위해서는 로프 의 길이 변화량을 정적, 동적 변화량으로 각각 나누어 살펴보아 야 한다.
∆ ∆∆ (4)
3-2 동역학 모델의 역학 관계식
로프 길이의 정적 변화량은 정적 평형 상태에서의 힘의 방정 식으로부터 얻을 수 있다. 평형 상태에서의 힘의 방정식은 다음 과 같다.
(5)
, 그리고 는 각각 중력, 로프 길이의 정적 변화에 따른 탄성력, 그리고 부력에 해당한다. 각각의 힘들은 다음과 같다.
(6)
∆ (7)
(8)
여기서 는 중력 상수, 는 중량물의 질량, 은 로프의 단 위 길이당 질량, 는 물의 밀도, 는 중량물의 부피, 그리고
는 물에 잠긴 로프의 길이를 나타낸다.
동역학 모델에서 중량물의 질량은 다음과 같다.
(9)
은 수중에서 수직 방향으로 운동하는 물체가 받는 수직 방향으로의 부가질량에 해당한다.
로프 길이의 동적 변화는 뉴턴의 운동방정식을 적용함으로 써 얻는다.
(10)
는 중량물의 가속도 항이며, , , 그리고 는 각각 로프 길이의 동적 변화에 따른 탄성력, 감쇠력, 그리고 중량물 에 작용하는 항력을 나타낸다. 각각의 힘들은 다음과 같다.
∆ (11)
∆ (12)
(13)
는 중량물의 항력 계수, 는 중량물의 수직 단면적, 는 중량물 주변 유체 입자의 속도를 표현한다. 본 논문에서는 깊은 수심에 있는 중량물을 두고 동역학 모델을 세우고 있으므 로, 는 무시할 만큼 작다고 가정할 수 있다. 따라서 로프 길이 의 동적 변화에 대한 식을 정리하면 다음과 같다.
∆
∆ (14)
상하동요 보상 시스템에서 제어 입력은 유압 구동식 윈치 시 스템에 포함되며, 윈치 동역학 식은 다음과 같다.
(15)
윈치의 각가속도항()은 상하동요 보상 시스템에서 직접 제 어하는 값이며, 는 윈치의 시간 상수, 는 입력 전압에 해 당한다. 는 의 유량 변화율에 대한 비례 상수이며, 는 전송률, 그리고 는 유압식 모터의 부피에 해당한다.
Ⅳ. 시뮬레이션 및 결과
4-1 시뮬레이션
본 연구에서 사용된 능동형 상하동요 보상 시스템 제어는 중 량물의 위치를 실시간으로 계측하여 크레인 끝단의 상하 운동 을 계산한다. 중량물이 제 위치를 유지하도록 추종하는 목표 변 위와 속도를 정하면, 현재 변위와 속도와의 차이를 오차로 정의 할 수 있다. 이렇게 정의된 오차로부터 PD 제어를 적용해 중량 물의 위치가 외란으로부터 유지되도록 한다.
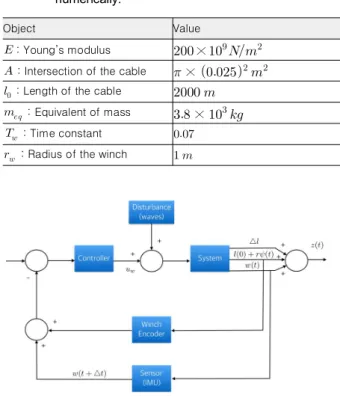
동역학식으로부터 시스템 구현 및 제어를 위해 블록 모델을 구성했으며, 실제 운용되는 해상 크레인의 작업 환경과 가까운 시스템 구현을 위해 표 1에서 보이는 것과 같은 제원들을 활용 했다. 시스템에서 계산한 시간은 100 초이며, 규칙적인 외란이 입력( sin )되는 시스템으로 시뮬레이션을 수행 했다. 전체 시스템의 블록 선도는 그림 1과 같다.
4-2 시뮬레이션 결과
시뮬레이션 수행 결과 그림 2와 같은 중량물의 상하동요 변 위값 그래프를 얻을 수 있었다. 그림 2에서 보이는 그래프는 상 하동요 보상 시스템에서 중량물의 위치가 초기 위치를 기준점 으로 상하로 진동하는 움직임을 보여주고 있다. 최대 변위의 크 기는 0.58 m에 해당한다.
그림 3에서는 PD제어를 이용해 중량물의 위치를 제어한 결 과를 도시했다. 제어 결과 최대 변위의 크기는 0.17 m이다.
해상 크레인에 영향을 미치는 외란이 중량물의 수직 운동에 가하는 영향력, 즉 에 대한 보상을 위해 예측 모델을 이용 하여 일정 시간 동안의 시간 지연값을 가지는 ∆항을 제어 입력으로 계산하여 시뮬레이션을 수행하였다. 그림 4에서 는 시간 지연이 0.5 초인 경우일 때의 중량물의 위치 변화이며, 그림 5는 시간 지연이 0.5 초일 때의 제어 입력값이다. 중량물 의 최대 변위는 0.082 m으로 진동폭이 PD 제어시보다 줄어들 긴 했으나, 진동수는 여전히 PD 제어 결과값과 크게 다르지 않 음을 확인할 수 있다.
Object Value
: Young’s modulus ×
: Intersection of the cable ×
: Length of the cable
: Equivalent of mass ×
: Time constant
: Radius of the winch 표 1. 수치해석에 사용된 제원
Table 1. Parameters used for the simulation in analyzing numerically.
그림 1. 상하동요 보상 시스템의 블록 선도
Fig. 1. The block diagram for active heaving compensation system.
그림 2. 중량물의 상하동요 보상 시스템에서의 상대적인 위치 Fig. 2. The relative motion of payload in heave compensation
system.
그림 6은 시간 지연이 0.1 초인 예측값을 이용한 결과 그래프 로, 최대 변위가 0.032 m로 줄어들었으며, 진동폭이 시간에 따 라 점차 줄어들며 안정된 상태를 향해 줄어듬을 확인할 수 있 다. 그림 7에서는 이러한 외란 제어에 필요한 제어 입력값이 도 시되어 있다. 장비 운용 시에는 0.1 초의 시간 지연값을 가지는 예측값만으로도 충분한 제어가 가능할 것으로 시뮬레이션 결 과 예상할 수 있다.
그림 3. PD 제어 결과
Fig. 3. The relative motion of payload in heave compensation system with PD control.
그림 4. 외란 제어 결과값(예측값의 시간 지연 = 0.5 초) Fig. 4. The relative motion of payload in heave compensation
system with estimated values involved where time-delay is 0.5 s.
그림 5. 외란 제어 입력값(예측값의 시간 지연 = 0.5 초) Fig. 5. The control input in heave compensation system
with estimated values involved where time-delay is 0.5 s.
그림 6. 외란 제어 결과값(예측값의 시간 지연 = 0.1 초) Fig. 6. The relative motion of payload in heave compensation
system with estimated values involved where time-delay is 0.1 s.
그림 7. 외란 제어 입력값(예측값의 시간 지연 = 0.1 초) Fig. 7. The control input in heave compensation system
with estimated values involved where time-delay is 0.1 s.
Ⅴ. 결 론
본 연구에서는 해상 크레인의 유압 구동식 윈치와 로프, 그 리고 중량물로 구성된 상하동요 보상 시스템을 모델링하고 제 어한 결과를 도시하였다. 제어 대상은 로프의 길이였으며, 주요 변수로는 로프 길이의 동적 변화였다. 따라서 로프 길이의 동적 변화와 관련된 동역학 모델을 구성하고, 로프 끝단의 중량물이 초기 위치를 그대로 유지하는 제어를 하기 위해 PD 제어기를 이용했다.
제어 결과 중량물의 변위의 크기는 10분의 1로 줄어들었으 며, 덧붙여 크레인이 받는 외란의 영향을 예측한 계산값으로 제 어함에 따라 중량물의 변위의 크기는 3분의 1로 더 줄어들었으 며, 진동수 역시 감소했음을 확인할 수 있었다.
예측 모델을 이용하여 시간 지연을 갖는 예측값을 활용하여 해상 크레인이 받는 외란에 따른 중량물의 수직 운동을 보상하 는 시뮬레이션을 수행했다. 이 때, 예측 모델을 활용하여 적절 한 시간 지연 값을 입력함으로써, 외란을 적절히 제어하는 데에
요구되는 제어 입력 시간 간격을 시뮬레이션 상에서 예상할 수 있었다. 외란 제어 입력시 시간 지연값은 예측 모델에서의 계산 과정에서 샘플링 주기를 변경함으로써 조절하였으며, 계측 장 비와 각 시스템간 통신에서 요구되는 최소 시간 지연값보다 높 은 값으로 설정했다. 이에 따라 0.5 초, 0.1초에 대해 각각의 시 뮬레이션을 수행했으며, 이 때 요구되는 제어 입력값도 함께 나 타내었다. 실제 장비를 운용할 경우 충분히 외란을 상쇄하여 제 어할 목적이라면, 시간 지연 값이 0.1 초 정도인 모델을 이용할 경우 소기의 목적을 달성할 것으로 예상할 수 있다.
앞으로 제어 효율을 높이기 위해 비선형시스템인 해당 모델 의 특성에 더욱 적합한 비선형 제어기를 연구할 계획이다. 또 한, 해상 크레인이 받는 외란을 실제 해상 환경에서의 외란값과 유사한 입력값으로 모델을 구축하여, 시뮬레이션을 수행할 예 정이다.
감사의 글
본 연구는 산업통상자원부와 한국산업기술진흥원이 지원하 는 경제협력권산업 육성사업으로 수행된 연구결과입니다.(과 제번호 R0004465)
참고 문헌
[1] J. K. Woodacre, R. J. Bauer, and R. A. Irani, “A review of vertical motion heave compensation system,” Ocean Engineering, Vol. 104, No. 1, pp.140-154, Aug. 2015.
[2] A. Southerland, “Mechanical systems for ocean engineering,” Naval Engineers Journal, Vol. 82, No. 5 pp.63-74, Oct. 1970.
[3] N. R. Barber, United States Patent(1982, September).
Control means for motion compensation devices. [Internet].
Available: http://patft.uspto.gov/netacgi/nph-Parser?Sect2
= PTO 1&Sect2=HITOFF&p=1&u=/netahtml/PTO /search -bool.html&r=1&f=G&l=50&d=PALL&RefSrch=yes&
Query=PN/4349179.
[4] R. Hutchins, United States Patent(1978, May). Heave compensation system. [Internet]. Available: http://patft.
uspto.gov/netacgi/nph-Parser?Sect2=PTO1&Sect2=HITOF F&p=1&u=/netahtml/PTO/search-bool.html&r=1&f=
G&l=50&d=PALL&RefSrch=yes&Query=PN/4091356.
[5] F. El-Hawary, “Compensation for source heave by use of a Kalman filter,” IEEE Journal of Oceanic Engineering, Vol.
7, No. 2 pp.89-96, April. 1982.
[6] A. B. Jones, and T. D. Cherbonnier, United States Patent(1990, October). Active reference system. [Internet].
Available: http://patft.uspto.gov/netacgi/nph-Parser?Sect2
=PTO1&Sect2=HITOFF&p=1&u=/netahtml/PTO/search- bool.html&r=1&f=G&l=50&d=PALL&RefSrch=yes&Quer y=PN/4962817.
[7] L. R. Robichaux, and J. T. Hatleskog, United States Patnet (1993, May). Semi-active heave compensation system for marine vessels. [Internet]. Available : http://patft. uspto.
gov/netacgi/nph-Parser?Sect2=PTO1&Sect2=HITOFF
&p=1&u=/netahtml/PTO/search-bool.html&r=1&f=G&l=5 0&d=PALL&RefSrch=yes&Query=PN/5209302.
[8] U. A. Korde, “Active heave compensation on drill-ships in irregular waves,” Ocean Engineering, Vol. 25, No. 7, pp.
541-561, 1988.
[9] K. D. Do, and J. Pan, “Nonlinear control of an active heave compensation system,” Ocean Engineering, Vol. 35, No.
5-6, pp. 558-571, April. 2008.
[10] A. Kyllingstad, United States Patent(2012, September). Method and apparatus for active heave compensation. [Internet].
Available: http://patft.uspto.gov/netacgi/nph-Parser?Sect2=
PTO1&Sect2=HITOFF&p=1&u=/netahtml/PTO/search-bo ol.html&r=1&f=G&l=50&d=PALL&RefSrch=yes&Query
=PN/8265811.
[11] S. Kuchler, T. Mahl, J. Neupert, K. Schneider, and O.
Sawodny, “Active control for an offshore crane using prediction of the vessels motion,” IEEE/ASME Transactions on Mechatronics, Vol. 16, No. 2, pp. 297-309, Apr. 2011.
[12] M. Richer, E. Arnold, K. Schneider, J. K. Eberharter and O. Sawodny, “Model predictive trajectory planning with fallback-strategy for an active heave compensation system,”
in 2014 American Control Conference, Oregon: OR, pp.
1919-1924, Jun. 2014.
정 성 훈 (Seong-hoon Jeong)
2007년 2월 : 한국해양대학교 전자통신공학과 (공학박사) 2010년 8월 ~ 현재 : 한국해양대학교 산업기술연구소 산학연구교수
※ 관심분야 : 사물인터넷(IoT), 해상통신, e-Navigation, ICT융합 기술기반 스마트 그린선박 성 형 석 (Hyung-Seok Seong)
2014년 2월 : KAIST 물리학과 (이학사)
2015년 2월 ~ 현재 : KIOST-KMOU 해양과학기술전문대학원 해양과학기술융합학과 지능로봇실험 연구실
※ 관심분야 : 수중로봇, 선박 운동, 수중 운동체 제어시스템
최 형 식 (Hyeong-sik Choi)
1993년 2월 : North Carolina State Univ. 로보틱스 및 제어공학 (공학박사) 1997년 5월 ~ 현재 : 한국해양대학교 기계공학과 교수
※ 관심분야 : 해양장비 및 수중로봇, 해양 무인화 시스템, 수중 가시광통신
이 상 기 (Sang-ki Lee)
2016년 4월 ~ 현재 :(주)테크플라워 기술연구소 상무이사
※ 관심분야 : 해상 및 Offshore Crane의 3D Modeling 및 구조해석, 슬라이딩 패드아이, 헬기 이송장치