<학술논문>
DOI https://doi.org/10.3795/KSME-B.2017.41.6.373ISSN 1226-4881(P rin t) 2288-5324(Online)
동적위치제어용 스러스터 사이의
유체역학적 상호작용에 대한 수치해석 연구
진 두 화*· 이 상 욱*
* 울산대학교 기계공학부
A Numerical Study on Hydrodynamic Interactions between Dynamic Positioning Thrusters
Doo Hwa Jin* and Sang Wook Lee*
*School of Mechanical Engineering, University of Ulsan
(Received November 1, 2016 ; Revised March 4, 2017 ; Accepted March 7, 2017)
Key Words: Computational Fluid Dynamics(전산유체역학), Dynamic Positioning System(동적위치제어 시스
템), Thruster-Thruster Interaction(스러스터-스러스터 상호작용)
초록 : 본 연구에서는 레이놀즈 평균 나비어-스톡스(Reynolds-averaged Navier-Stokes, RANS) 방정식을 적 용하여 스러스터(thruster) 상호작용에 대한 점성 유동 CFD 해석을 수행하였다. 수치해석은 상용 프로그 램인 STAR-CCM+를 이용하였으며, 프로펠러와 No.19a 덕트로 스러스터 모델을 구성하였다. 프로펠러의 회전에 의한 동적인 움직임의 해석을 위해 슬라이딩 격자(sliding mesh)기법을 사용하였으며, 격자구성은 다중영역으로 구분하여 육면체 격자 (hexahedral element)로 구성하였고, 계산 시간의 경제성을 고려하여 비등각(non-conformal) 격자를 이용하였다. 스러스터 배치를 그대로 유지한 상태에서 상류방향 스러스터 의 방위각 (azimuth angle)과 축 기울기에 따라 스러스터 상호작용이 크게 변화하였다. 이러한 결과를 통 해 축 기울기와 방위각이 추진성능에 중요한 영향을 미치는 것을 확인하였다.
Abstract: In this study, we conducted computational fluid dynamics (CFD) simulations for the unsteady
hydrodynamic interaction of multiple thrusters by solving Reynolds averaged Navier-Stokes equations. A commercial CFD software, STAR-CCM+ was used for all simulations by employing a ducted thruster model with combination of a propeller and No. 19a duct. A sliding mesh technique was used to treat dynamic motion of propeller rotation and non-conformal hexahedral grid system was considered. Four different combinations in tilting and azimuth angles of the thrusters were considered to investigate the effects on the propulsion performance. We could find that thruster-hull and thruster-thruster interactions has significant effect on propulsion performance and further study will be required for the optimal configurations with the best tilting and relative azimuth angle between thrusters.
Corresponding Author, [email protected]
Ⓒ 2017 The Korean Society of Mechanical Engineers
- 기호설명 -
B : 전 계산영역의 좌우방향 길이
: 압력계수
: Pod의 익현길이
d
c: 선저에서 스러스터 축 중심까지의 거리
: 프로펠러 직경
: 전 계산영역의 상하방향 길이
: 날개 전진비
: 추력계수
: 토크계수
: 전 계산영역의 전후(유동) 방향 길이
: 프로펠러 피치
: 날개 앞전(Leading edge)를 0, 뒷전
(Trailing edge)를 1로 무차원한 좌표
선박의 동적 위치 유지는 매우 중요하며, 최적의 동적 위치 제어 구현을 위한 스러스터 (thruster)의 비정상 추진성능 상세 예측은 필수적으로 요구된 다 . 일반적으로 여러 대의 동적 위치 제어 스러 스터가 작동되는 경우, 스러스터-선체 상호작용 (thruster-hull interaction) 및 스러스터-스러스터 상 호작용(thruster-thruster interaction)으로 인한 상당 한 추력손실 및 동적 제어 효율 저하가 발생할 수 있으며, 이러한 추력손실을 최소화하기 위해 스러스터의 최적 배치 및 설계 구성 등에 대하 여 많은 연구가 수행되어 왔다. 그러나, 대부분 의 기존 연구들은 스러스터의 상호 공간적 배치 에 따른 추력성능 해석을 수행하여 비교 분석하 였다 .
N. Bulten 등
(1)은 스러스터의 축 기울기에 따른 스러스터 -선체 상호작용과 스러스터-스러스터 상 호작용에 대해서 연구하였다. 기울기가 0°인 스러 스터 모델에서 Coanda 효과로 인해 유선이 선저 와 평행하게 나타난다. 이러한 스러스터-선체 상 호작용으로 인해 큰 마찰손실이 발생하여 8° 기 울어진 스러스터 모델에 비해 추력이 5 % 정도 감소하였다 . 스러스터-스러스터 상호작용에 대한 해석 결과는 Azimuth 스러스터의 경우 후류가 진 행하는 방향으로 다른 스러스터가 위치한 경우 추력이 약 50% 감소함을 보였다. 이를 통해 스러 스터의 기울기와 배치를 개선하여 얻을 수 있는 최대 추력은 35%로 추정하였다.
H. Ottens 등
(2)은 반잠수식 크레인 선박 모델에 서 좌우에 3대씩 총 6대의 스러스터가 설치되어 있는 경우 , 스러스터를 작동시키는 개수와 방위 각에 따른 선박의 속도를 비교 분석하였다. 이 때 상호 방위각의 차이가 0°일 때보다 15°일 때 선박 속도가 10% 향상되는 것을 확인하였다.
본 연구에서는 두 개의 스러스터를 일렬로 배 치하여 앞쪽에 위치한 스러스터의 축 기울기 및 방위각 (azimuth angle) 변화가 후류에 위치한 스러 스터의 성능에 어떠한 영향을 미치는지 대하여 수치해석을 통한 분석을 수행하였다 . 스러스터는 프로펠러-덕트-Pod로 구성되어 있으며, 방위각 및 축 기울기는 기존의 연구
(3)에서 적용한 조건을 참고하였다.
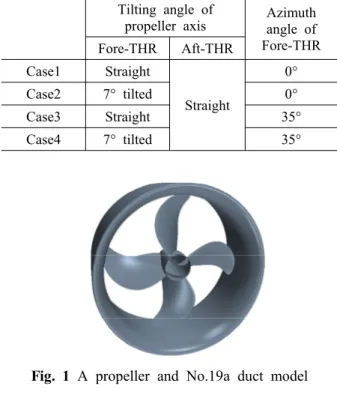
본 연구에 적용된 프로펠러 및 덕트로 구성된 스러스터 형상을 Fig. 1에서 나타내었다. Fig. 2에 서는 축이 선저와 평행한 모델과 아래 방향으로 7° 기울어진 모델의 개략도를 보여주고 있다. 스 러스터 형상 모델링은 CATIA V5를 이용하였다.
프로펠러 직경 D=1.5m이고, r/R=0.7에서 피치비 P/D=1.171, 덕트의 길이는 L /D =0.5이다. 선체와 연결부인 Pod 단면은 NACA66 날개 단면형상을 이용하여 설계하였으며, Pod의 익현길이(chord)
=1.1m이다. 선저에서 스러스터 축 중심까지의 거리 d
c=1.5m로 설정하였다.
Table 1 Thruster positioning conditions Tilting angle of
propeller axis Azimuth angle of Fore-THR Fore-THR Aft-THR
Case1 Straight
Straight
0°
Case2 7° tilted 0°
Case3 Straight 35°
Case4 7° tilted 35°
Fig. 1 A propeller and No.19a duct model
(a) Straight thruster (b) 7° tilted thruster
Fig. 2 Side plan of the straight thruster and 7° tiltedthruster
(a) Case1
(b) Case2
(c) Case3
(d) Case4
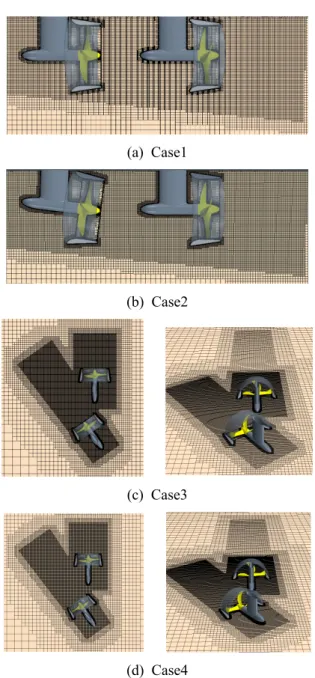
Fig. 6 Computational grid system
(a) Case1 (b) Case2
(c) Case3 (d) Case4
Fig. 3 A ground plan of thruster arrangement
(a) Case1 (b) Case2
(c) Case3 (d) Case4
Fig. 4 A side view of thruster arrangementFig. 5 Surface mesh on the propeller and duct
Fig. 3과 4는 스러스터 배치를 나타내고 있다.
상류 스러스터가 Fore-THR이고, 후류에 위치한 스러스터가 Aft-THR이다. 각 경우에 적용된 스러 스터의 경사각 (tilting angle) 및 방위각(azimuth angle)을 Table 1에 나타내었다.
2.2 수치격자 시스템
본 연구에서는 STAR-CCM+를 이용하여 계산 영역의 수치격자 시스템을 생성하였다 .
전체 계산영역은 L×B×H = 28m×20m×16m로 설
정하였고, 두 개의 스러스터 영역과 바깥 유동장 영역 등 세 영역으로 나눠 격자를 구성하였다 .
Fig. 5는 덕트와 스러스터 표면의 격자 시스템
을 나타내고 있고 , Fig. 6은 비등각(non-conformal)
격자를 이용하여 구성한 3차원 유동장 영역의 격
자 시스템을 보여주고 있다 . 스러스터 영역의 격
자 개수에 따른 해의 수렴도를 결정하기 위하여
해의 격자 독립성 시험 (grid independence test)를
수행하였고, 최종 계산을 위해서는 150만개로 구
성된 스러스터 영역 격자시스템을 적용하였다 .
Fig. 7은 스러스터 영역 격자수에 따른 여러 반경
(r/R)에서의 압력분포
분포를 보여 주며, 격자
수가 150만개 이상인 경우, 날개의 앞전과 뒷전
Fig. 7 Pressure coefficient for grid independence
test
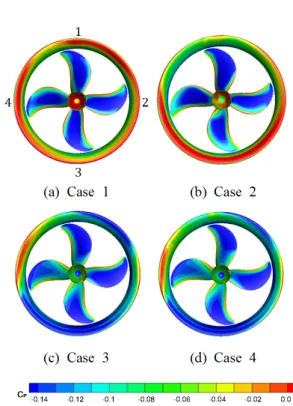
Fig. 8 Instantaneous pressure contours on the suction
surface of Aft-THR
에서
값이 약 5%의 차이가 나는 것을 제외 하고는 전체적으로 일정하게 수렴하는 결과를 확 인하였다 .
2.3 수치해석 방법 및 경계조건
지배 방정식은 연속방정식과 레이놀즈 평균 나 비어-스톡스(Reynolds average Navier-Stokes; RANS) 방정식을 적용하였다 . 해석은 비압축성, 비정상상 태로 수행되었으며, 입구 영역에는 균일한 속도 를 , 출구 영역에서는 정압 조건을 사용하였다. 수 치 이산화에 있어서는 대류항은 2차 풍상차분법 (2nd order upwind scheme), 압력-속도 연성방법 으로 SIMPLE 알고리즘을 적용하였다. 또한, 프 로펠러의 회전에 의한 동적인 움직임의 해석을 위해 슬라이딩 격자(sliding mesh) 기법을 사용하 였으며 (dt = 0.004s), 바깥쪽 경계면에는 free slip 경계 조건을 적용하였다. 동적위치제어 시스템의 대 표적 예인조건인 스러스터 전진비 (advanced ratio) 를 J = 0.2로 고정하였다.
난류모델로는 Menter의 SST(Shear Stress Transport) 모델을 사용하였다.
(4)표준 모델은 많은 공학적 유동 문제에서 사용하는 난류모델이지만 회전유동이나 벽면 근 처에서의 난류 예측에 있어 단점을 보였다 . 반면 에 모델은 벽면 근처에서 감쇠 함수를 고 려하지 않아 방정식이 간단하고 비교적 정확한 값을 보여준다. SST 난류모델은 난류모델과
난류모델의 장점을 살려 벽면 근처에서는
모델로 전환되고, 벽면에서부터 먼 충분히 발달된 난류 지역에서는 표준 모델이 적용 된다. 본 계산에서 y+ = 11이며, 중간정도의 해상
도를 가진 격자계에 대해 STAR-CCM+에서 제공 하는 하이브리드 기법인 All y+ wall treatment 기 능을 설정하였다 .
3. 결과 및 고찰
3.1 스러스터 상호작용 해석
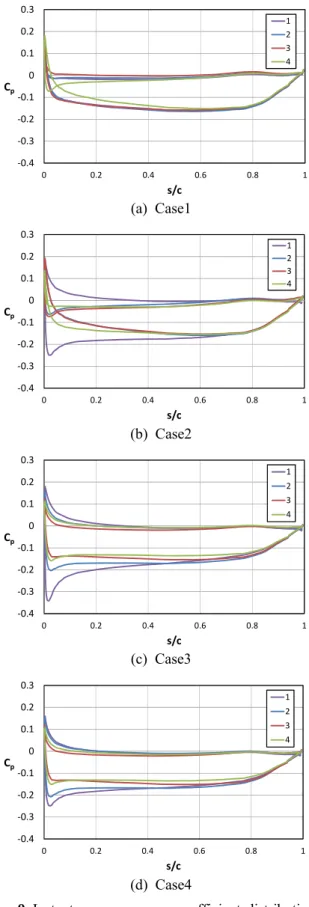
Fig. 8은 후류방향에 위치한 Aft-THR 흡입면에 서의 압력분포를 보여주고 있으며, Fig. 9에서는 날개 앞전 (leading edge)을 s=0, 뒷전(trailing edge) 을 s= 1로 무차원한 좌표에서 r/R = 0.7 위치의 압 력계수 그래프를 나타내었다 .
Case1에서는 Fore-THR로부터의 회전유동이
Aft-THR에 바로 유입되면서, 흡입면에서의 압력
저하가 상대적으로 크지 않은 것을 볼 수 있으
며 , 특히 Pod의 영향으로 4번 날개면의 압력계수
분포가 다른 날개면과 차이를 보였다. Case2는
앞쪽에 위치한 Fore-THR의 축이 7° 기울어져 있
기 때문에 전반적으로 Aft-THR의 아래 방향으로
후류유동이 유입되어 다른 날개면에 비하여 상대
적으로 1번 날개면에 Fore-THR 후류의 영향이 작
게 된다 . 이에 따라, 1번 날개면의 유효 전진비가
상대적으로 크기 때문에 흡입면 압력저하가 크게
발생하는 것을 볼 수 있다 . Case3은 Fore-THR의
방위각이 35° 우측으로 틀어져 있어 Fore-THR의
-0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3
0 0.2 0.4 0.6 0.8 1
Cp
s/c
1 2 3 4
(a) Case1
-0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3
0 0.2 0.4 0.6 0.8 1
Cp
s/c
1 2 3 4
(b) Case2
-0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3
0 0.2 0.4 0.6 0.8 1
Cp
s/c
1 2 3 4
(c) Case3
-0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3
0 0.2 0.4 0.6 0.8 1
Cp
s/c
1 2 3 4
(d) Case4
Fig. 9 Instantaneous pressure coefficient distributions
on Aft-THR (r/R = 0.7)
(a) Case1
(b) Case2
(c) Case3
(d) Case4
Fig. 10 Instantaneous velocity magnitude contours
후류가 직접적으로 Aft-THR로 유입되지 않기 때 문에 날개 흡입면에서의 압력저하가 높게 나타나
는 것을 확인할 수 있으며, 특히 Pod 의 영향으 로 1번 날개면에서 압력저하가 더 높게 발생하였 다. Case4에서는 Fore-THR의 방위각이 35° 우측 으로 틀어져 있고 , 축 기울기가 아래 방향으로 7°
기울어져 있다. Case3과 비교하였을 때, 다른 날 개면에서는 거의 유사한 압력분포를 보이나 , 1번 날개의 흡입면에서 압력저하가 크지 않은 것을 확인할 수 있다 .
Fig. 10은 유동장 영역에서 속도 분포를 보여주
고 있다 . Case1에서 Fore-THR에 의해 가속된 유
동이 바로 Aft-THR에 유입되는 것을 볼 수 있다.
(a) Case1 (b) Case2
(c) Case3 (d) Case4
Fig. 11 Instantaneous wall shear stress on a bottom
hull
(a) Case1 (b) Case2
(c) Case3 (d) Case4
Fig. 12 Vortical structures by Q-criterion(5)또한, Coanda 효과로 인해 후류유동이 선저에 상 대적으로 더 큰 영향을 발생시킬 수 있음을 알 수 있다. Case2는 Fore-THR의 후류 유동의 영향 으로 Aft-THR의 후류 유동 또한 Case1에서보다 아래 방향으로 향하는 것을 볼 수 있다. Case3과 Case4는 속도분포를 평면도로 나타내었으며, Case3의 경우 Fore-THR은 우측으로 틀어져 있 어 , 후류유동이 Aft-THR의 우측에 더 큰 영향을 주게 됨을 확인할 수 있다. Case3과 Case4를 비교 할 때 유동장 분포가 크게 차이를 보이지 않으 나, Case3의 경우, Aft-THR의 간섭 영향으로 인하 여 Fore-THR 후류의 방향이 Aft-THR 쪽으로 바 뀌는 것을 확인할 수 있다.
Fig. 11은 선저의 벽 전단응력을 보여주고 있 다. Case1의 경우 Fore-THR에서 가속된 유동이 Aft-THR의 Pod에 부딪히면서 그 주위에서 벽 전 단응력이 증가한다. 또한, Aft-THR의 후류에서는
Coanda 효과로 인해 벽 전단응력이 증가하는 것 을 볼 수 있다. 반면 Case2의 경우 기울어진 축 으로 인하여 Fore-THR의 후류유동이 아래 방향으 로 향하기 때문에 스러스터-선체 상호작용이 Case1보다 상당히 줄어든 것을 확인할 수 있다.
Case3의 경우는 Fore-THR와 Aft-THR 모두 후 류 유동이 발달됨에 따라 선저와의 간섭이 증가 하는 것을 볼 수 있다. 특히 Case4의 경우, Fore- THR에 의한 선체 영향은 축기울기로 인한 영향 때문에 Case3보다 상대적으로 더 후방에서 선저 와의 간섭이 시작하는 것을 볼 수 있다 . Fore- THR의 방위각이 35°인 경우(Case3 & 4), 스러스 터가 일렬로 배치된 경우 (Case1 & 2)에 비해 후 류의 선저 간섭이 더 넓은 영역에서 높게 나타나 는 것을 확인할 수 있다 .
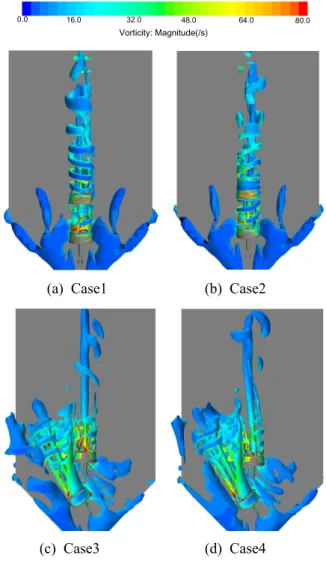
Fig. 12는 Q-criterion
(5)(Q = 3.0)을 적용하여 유동
장의 3차원 와류 구조(vortical structure)를 가시화
Fig. 13 Thrust coefficients of thrusters
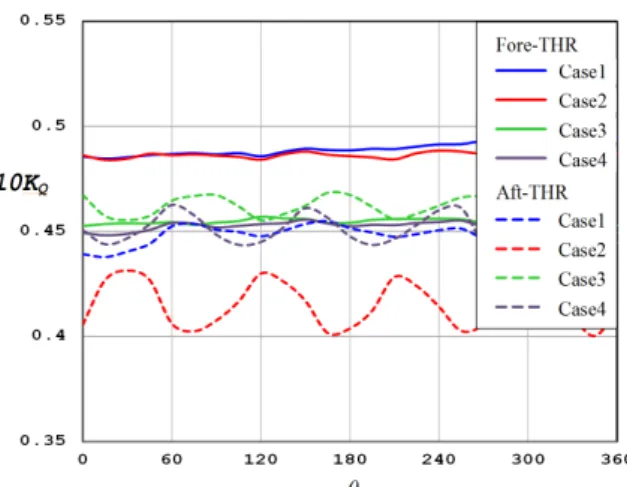
Fig. 14 Torque coefficients of thrusters
하였다 . Q-criterion은 와도(vorticity)의 크기와 전
단변형률(shear strain rate)의 관계를 이용하여 정 의된 유동 가시화 방법 중의 하나로 , Q > 0이면 물리적으로 와도 크기가 전단변형률보다 영향이 크다는 것을 의미한다 . Case1은 Fore-THR에서 발 생한 와류가 후류 쪽의 Aft-THR의 영향으로 인하 여 발달하지 못하고 Pod와 덕트에 부딪힌다.
Aft-THR 후류에서는 발생한 와류가 선체와의 상 호작용으로 와류 세기가 점차 작아지는 것을 확 인할 수 있다. Case2는 Case1과 같이 Fore-THR에 서 와류가 생성되지만 , Aft-THR로 인하여 크게 발달하지 못하고 Pod와 덕트에 부딪힌다. Aft- THR 후류에서 다시 와류가 발달하지만 Case1보 다 세기가 현저히 작은 것을 확인할 수 있다. 이 는 Fore-THR를 지나온 유동이 축 기울기로 인하 여 Aft-THR의 아래 방향으로 들어오기 때문에 덕 트 받음각이 커지게 되어 Aft-THR의 덕트 출구부 분에서 유동이 원활하게 뻗어나가지 못해 와도가 크게 발달하지 못하는 것으로 추측된다 .
Case3은 35° 방위각을 가진 Fore-THR의 후류가 Aft-THR 간섭 효과로 인하여 Aft-THR 쪽으로 와 류가 확대되는 것을 볼 수 있다.
Case3과 Case4의 경우, 3차원 와류 구조에서 축 기울기로 인한 영향이 크게 나타나지 않았다.
3.2 추진 성능 비교
Fig. 13은 선수 방향으로의 스러스터 추력을 비 교한 그래프이다. Fore-THR에서 축 기울기에 따 른 추력 손실은 크지 않지만 , 35° 방위각에 의하 여 실질적으로 선수 방향으로의 추력 감소는 크 게 나타난다 . Aft-THR에서는 Fore-THR의 후류가 바로 유입되는 Case1과 Case2의 추력이 Case3과 Case4에 비해 크게 낮은 것을 알 수 있으며, Case2에서 추력이 더 낮아지는 것을 볼 수 있다.
이는 Fore-THR에 의한 유동 가속 및 축 방향과 정렬되지 않은 후류 유입 방향으로 인하여, Aft-THR의 전진비가 최적화 되지 않아 추력 저하 가 발생한 것으로 보인다. Fig. 14는 토크계수 그 래프이다 . Fore-THR의 경우, 토크계수에 대한 축 기울기의 영향이 크지 않은 것을 알 수 있다.
그러나 , 35° 방위각으로 인하여 Case3과 Case4 의 경우, Fore-THR의 토크계수가 크게 낮아지는 것을 알 수 있으며 , 특히 Case2의 경우, Aft-THR 에서 추력 및 토크계수 변동량이 상대적으로 큰 것을 알 수 있다 .
이를 통하여 전류 및 후류 스러스터의 추진 성 능이 스러스터 사이의 상호작용에 의해 큰 영향 을 받는 것을 확인할 수 있으며 , 이러한 상호작 용을 고려한 프로펠러의 최적 설계가 매우 중요 함을 알 수 있다 .
4. 결 론
본 연구에서는 단순화한 선박 모델에서 다중 스러스터가 작동될 때, 스러스터 방위각 및 축 기울기의 변화에 따른 스러스터 -선체 상호작용 (thruster-hull interaction)과 스러스터-스러스터 상 호작용 (thruster-thruster interaction)이 추진 성능에 미치는 영향을 파악하기 위하여 수치해석을 수행 하였다 .
상류에 위치한 스러스터의 방위각이 0°일 때,
7°의 축기울기를 가진 스러스터 모델의 추력 성
능이 가장 우수하였으며, 스러스터-선체 상호작용
능에도 영향을 미치는 것을 알 수 있었다. 이러 한 결과를 바탕으로 두 스러스터 사이의 거리 및 방위각이 상호 고려된 최적의 설계를 통하여 전 체 추력 성능 저하를 개선할 수 있어 이에 대한 더 많은 연구가 필요할 것으로 생각된다.
참고문헌