Particle and Aerosol Research
Par. Aerosol Res. Vol. 10, No. 2: Jun 2014 pp. 45-51 http://dx.doi.org/10.11629/jpaar.2014.10.2.045
Theoretical Study on Magnetic Field Application for Fine Particle Capture
Shan Huang, Haewoo Park, Youngmin Jo* Department of Environmental Engineering, Kyunghee University
(Received 28 May 2014; Revised ; Accepted )
Abstract
Fine particle capture is facing a challenge since traditional filtration which relies on the combination of impaction, interception, diffusion has a limited efficiency for fine particle capture particularly in size from 0.1 to 0.5 μm. This paper reviewed the collection efficiency of above mechanisms, as well as magnetic mechanisms for ferromagnetic particles, and mainly studied the influencing factors of magnetic filtration. Filtration velocity, magnetic field intensity and fiber size were found to be the most important parameters for magnetic filtration.
Keywords:Magnetic filtration, Single fiber efficiency, Submicron particle, Magnetic field intensity
* Corresponding author.
Tel:+82-31-203-4589, E-mail:[email protected]
1. Introduction
Fibrous filtration is the most common method for aerosol control due to the advantages of providing high collection efficiencies at low-pressure drop for capturing sub-micrometer particles. It is used in a wide range of applications in indoor air and industrial gas stream for the air pollution control. A fibrous filter consists of a mat of fine fibers arranged in such a way that most are perpendicular to the direction of air flow. And the pack- ing density is on the order of 0.1 or less, representing a relatively porous open packing of fibers that offer small aerodynamic resistance to air flow. A typical op- erating face velocity of a fibrous filter is in the 0.1 to 3 m/s range (Donovan, 1985). The most common mate- rials of fibers in fibrous filters are cellulose (wood), glass, ceramic, stainless steel and plastic.
In general, various physical mechanisms contribute to a high efficiency fibrous filter's effectiveness in captur- ing particles. The most predominant mechanisms are in- terception, inertial impaction and diffusion. In addition, filter efficiency varies with particle size, for less than 0.1 μm in diameter particles, the primary filtration mechanism is diffusion, for above approximately 0.5 μ m particles , interception along with inertial impaction are predominant, for particles between approximately 0.1 and 0.5 μm the filter is less efficient in spite of dif- fusion and interception regime as the particles are too large for a great diffusion effect and too small for a large interception effect. Conventionally, electrical ef- fects can improve collection efficiencies by Coulomb force and polarization force.
An additional magnetic mechanism can be in- corporated to the conventional gas filtration in order to better retain these paramagnetic/ferromagnetic particles from their emission to the atmosphere. Magnetic tech- nology in gas filtration was first presented by Lucchesi, Hatch, Mayer, and Rosensweig (1979) by using a mag- netically stabilized bed of cobalt for the hot gases filtra- tion with high efficiency. Magnetic filtration is a power- ful method for the removal of paramagnetic and ferro- magnetic particles (Gerber and Birss, 1983;Ying,
Yiacoumi and Tsouris, 2000). It offers high filtration rates, low pressure drop across the filter, applicability to small particles (< 1 μm) that would plug most conven- tional filters, and the capability to release the captured material without disassembling the filter (by turning off the external magnetic field)( Hirschbein, Brown, and Whitesides, 1982).
There are two types of magnetic filtration systems, one consists of nonmagnetic canisters filled with ferro- magnetic filter-matrix elements immersed in an applied magnetic field sufficient to saturate these elements mag- netically (Brewis, 1996), the other contains a simple magnetic grate.
This paper gives a theoretical study of the capture ef- ficiency of a magnetic filter, the capture mechanisms in the presence of magnetic forces and discussed the de- pendency of filter performance on filtration velocity and external magnetic field intensity in magnetic filters.
2. Theoretical review
Magnetic force is long range and is the dominant fac- tor in particle capture. The magnetic force acting on a paramagnetic particle in the vicinity of a ferromagnetic collector can be 100 times larger than gravity. The cap- ture cross section of a bare collector in a magnetic field can be 100 times larger than that due to inertial im- paction alone (Cummings, Himmelblau, Oberteuffer, 1976).
2.1 Trajectory prediction
Consider a small particle near a ferromagnetic cylin- der which is in a magnetic field. The path of the par- ticle is dependent on the gravitational, inertial, drag, and magnetic forces acting on it.
The following assumptions were used to calculate of individual particle trajectory:
1) According to the previous study of Zarutskaya and Shapiro (2000), particles are spherical in shape, and their rotational effects are negligible. Particles’ magnetic susceptibility is assumed to be constant, and their mag-
netic moments are assumed to be oriented in the direc- tion of the magnetic field.
2) Under a low Reynolds number flow system, the particle trajectory can be calculated by the force balance equation, including gravitational (Frg), magnetic (Frm), drag (Frd), and random (Frbr) forces.
3) No particle re-entrainment occurs, and deposited particles do not significantly alter the flow and mag- netic fields in the unit cell.
The trajectory of a submicron particle moving in a gas with velocity vr under the action of gravitational, magnetic, drag, and random forces is determined by the force balance equations based on the Newton’s second law.
br F m F g F d dt F
v mpd
r r r r r
+ + +
= (1)
Here, mpis the particle mass; t the time variable.
Particle drag force Frdis expressed as
) (v v f d Fr rf r
−
= (2)
where vrf the flow velocity vector; and fthe particle friction coefficient given by the stokes law as
/ c
3 d C
f= πμ p (Friedlander 2000), where Cc is the Cunning- ham slip correction factor, expressed as
2 )) 999 . exp( 0 558 . 0 142 . 1 2 ( 1 Cc
λ
λ p
p
d
d + × −
+
= (3)
Where λis the mean free path.
g
2 2
K ρ λ π
p B
d
= T
(4) Where KB is Boltzmann’s constant, ρgas density, dp
particle diameter, T temperature.
Because of the small size of particles, the magnetic field in the particle is assumed to be approximately uniform. The following expression was then used to evaluate the magnetic force Frm
on a magnetic particle:
)
0 (M H
m
Fr r r
⋅
∇
=μ (5)
Where μ0 is the magnetic permeability of free space, Hr
the magnetic field strength, and Mr the particle mag- netic moment, whose scale is related to the magnet- ization of particle by
HVp
M 1 χ3 χ
= +
(6)
Where χis the particle magnetic susceptibility, and Vp the particle volume (Lin et al. 2006).
In Brownian motion, a particle at time t and position
pwill make a random displacement r from its previous point with regard to time and position. The resulting distribution of r is expected to be (1) Gaussian (normal with a mean of zero and a standard deviation of one), (2) to be independent, and (3) have a root mean square displacement of 2Dt in its x, y, and z coordinates. The random displacement r in one coordinate can be calcu- lated as
Dte
r 2
2
2
2 ζ
π
= −
(7) where ζis a random number.
The trajectory for a given particle was determined by solving equation (1) using the Runge-Kutta method of the 4th order.
2.2 Efficiency prediction
Direct interception takes place on account of the fi- nite size of the particles, primarily effect particle size larger than 0.1μm. The single fiber efficiency due to in- terceptionηI, is defined
R R K ⋅ +
= − 1
1 2
I
η α (8)
K is called the Kuwabara hydrodynamic factor., and
2
4 1 4 3 2
K= In1 α− +α− α (9)
Here, α is filter solidity, fraction of the total volume of the filter element actually occupied by fibers.
Inertial impaction occurs when a particle is so large (>0.5μm) that it is unable to quickly adjust to the abrupt changes in streamline direction near a filter fiber.
The particle, due to its inertia, will continue along its original path and hit the filter fiber. This type of filtra- tion mechanism is most predominant when high gas ve- locities and dense fiber packing of the filter media is present.
Inertial deposition depends mainly on the Stokes num- ber (Nst):
Im 2K2 J Nst
η =
(10)
where,
f f p p c
d v d Nst C
μ ρ 18
2
= (11)
J is related to R, and is expressed as follows:
8 . 2 2 63 .
0 ) 27.5
28 6 . 29
( R R
J= − α − for R<0.4 (12)
0 .
=2
J for R>0.4 (13) By definition of the single fiber efficiency due to dif- fusion
23 3 1
61 .
2 ⎟ −
⎠
⎜ ⎞
⎝
= ⎛ − Pe
D K
η α (14)
Peclet number (Pe) is equal dfvf/D, and D=kTCc/3πμdp. Magnetic filter performance ηM, is basically ex- pressed as follows (Sandulyak, 1988; Sarikaya M, Abbasov T & Erdemolu M, 2006):
) 1
( ξ
φ
ηM= −e− (15)
where φ is the fraction of ferromagnetic particles pres- ent in the fluid to be cleaned, and ξ is the logarithmic efficiency coefficient described as a function of certain filtration parameters as follows (Sarikaya M, Abbasov T
& Erdemolu M, 2006):
d f f f
p L
d v
d H 0.6
2 38 2 . 1
6 1 1
10
3 ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −
×
= −
ρ φ
ξ χμ ( )
(16) where Ld=L/df is the dimensionless length of the filter, χ is the effective magnetic susceptibility equal to χ −p χf in which χp is the magnetic susceptibility of the par- ticles, χf is the magnetic susceptibility of the fluid, m is the magnetic permeability of the matrix elements (spheres in this study), H is the external magnetic field intensity, df is the size of spheres (fibers), μ1is the rela- tive magnetic permeability of filter elements, vf is the filtration velocity of the fluid, ε is the porosity of the filter matrix, dp is the size of particles in the liquid to be cleaned, and L is the length of magnetic filter.
Magnetic susceptibility of the magnetic particles (dp
<5mm), which may be present in industrial fluids sub- jected to magnetic filtration, can be assumed as χ= 0.05–0.5 (Sarikaya et al., 2006).
Common practice has been to combine single-fiber collection efficiencies by simply adding them. This pro- cedure is not rigorously justified but works adequately
when one mechanism predominates or when all sin- gle-fiber efficiencies are low. Combining of diffusion and interception are proved satisfactory by Lee and Liu (1982), while more addition of the individual electri- cally based single-fiber efficiencies seems unlikely to predict results adequately (Loeffler, 1978).
3. Filter performance
In the large particle regime (>0.5μm) in which inter- ception and inertial impaction dominate, the classical mechanisms predict that filter efficiency increases with either increasing Vf or dp. Filter efficiency (E) can be related to single-fiber collection efficiency(η) as fol- lows:
)) 1 ( exp( 4
1 π α
ηα
−
− −
= df
E L
(17)
3.1 Effect of magnetic force on magnetic filter performance
Magnetic force is the most important factor, since it directly affects the filtration process and is dependent on the external magnetic field intensity. Filter perform- ance increases as the external magnetic field intensity increases (Watson, 1973; Parker, 1977; Gerber and Birss, 1983; Franz and Franzeb, 1998; Svoboda, 2001;
Yavuz et al., 2006; Baik et al., 2013).
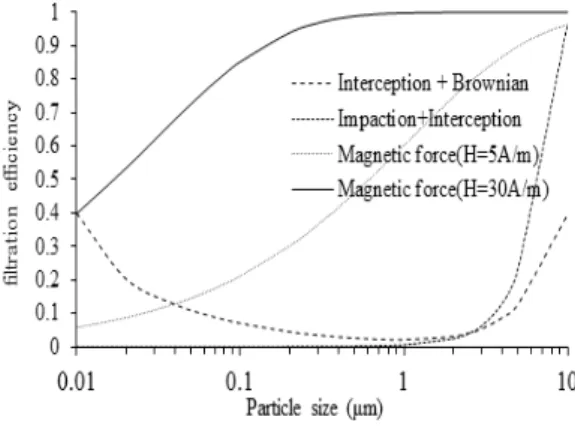
Fig. 1. Filtration efficiency based on classical capture mechanisms.
Parameters Values Units Ferromagnetic particles fraction of all particles (Φ)
Magnetic susceptibility (χ) Fiber diameter (df) Fiber Length (L)
Magnetic field intensity (H) Fluid velocity (Vf)
1 0.5 0.00004 0.042 5/30 0.05
m m A/m m/s Table 1 Values and dimensions of the parameters used in the magnetic filtration prediction.
Fig. 2. Effect of magnetic field intensity on filtration efficiency. Fig.3 Effect of flow velocity on filtration efficiency.
The predictions show magnetic filtration efficiency increases with particle size which make up for the con- ventional low efficiency area (0.5-1㎛) (Figure 1). The values of parameters used in the magnetic filtration are given in Table 1.
In addition, as shown in equation (16), the magnetic, hydrodynamic and geometric parameters such as H, Vf, df, dp, L that can greatly affect the filter mechanism play a very important role in filtration. Therefore, these parameters are studied in following parts.
3.2 Effect of magnetic field intensity on filtration efficiency
Many theoretical and experimental studies have shown that the dependence of filter performance on magnetic field intensity (H). Figure 2 presents the re- sults of filtration for removal of magnetite by applica- tion of different external magnetic field intensities. The
sizes of the particles are in the range of 0.1-2.5μm. The effect of external magnetic field intensities on the filter performance is significant, filtration efficiency increases with magnetic field intensity due to the enhanced mag- netic force, and the logarithmic efficiency is not linearly dependent on magnetic field intensity.
3.3 Effect of flow velocity and fiber size on magnetic filtration efficiency
Filtration velocity and size of the captured particles are the key parameters affecting the filtration process.
Figure 3 shows the dependence of inverse logarithmic efficiency coefficient on filtration velocity, showing its no-linear relationship for theoretical calculation, con- forming to the relationship 1/ξ∝Vf2.High velocity causes high impaction, and the gas will carry the particle pene- trate the filter. Meanwhile, less retention time caused by high velocity also decrease the filtration efficiency.
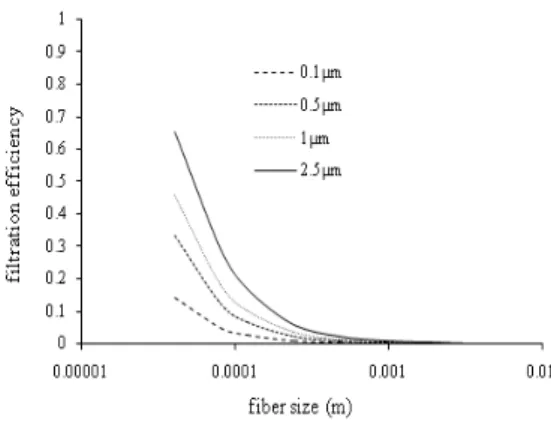
Fig. 4. Effect of magnetic fiber size on filtration efficiency.
It’s obvious that in Fig.4 at any given particle size the filtration efficiency falls with the increase of the fi- ber size. The smaller fiber size, the more contact area, the smaller the porosity, the more efficiency. And the efficiency coefficient on the fiber size has been propor- tional with df-1.6 according to the equation 16.
4. Conclusions
Magnetic attraction between ferromagnetic medium is one of the filtration mechanisms which include dif- fusion, direct interception and impaction. The efficiency of magnetic filtration is mainly determined by magnetic field intensity, filtration velocity, and fiber size.
Magnetic particle fraction is also a key factor for mag- netic filtration. Experimental work should be carried out to prove the calculation results.
NOMENCLATURE α filter solidity
χ magnetic susceptibility ξ logarithmic filtering coefficient μ dynamic viscosity (Pa⋅s) μ1 relative magnetic permeability νf filtration velocity (m/s) η efficient coefficient
φ ferromagnetic fractions of all particles ρf fluid density (kg/m3)
dp particle diameter (m) df fiber diameter (m) λ mean free path (m)
KB Boltzmann’s constant
Cc Cunningham slip correction factor
Nst Stokes number
H magnetic field intensity (A/m) L fiber length (m)
References
Baik S.K., Ha D.W., Kwon J.M., Lee Y.J., Ko R.K.
(2013). Magnetic force on a magnetic particle within a high gradient magnetic separator.
Physica C, 484:333–337.
Brewis T. (1996). Metal extraction by bacterial oxidation.
Minerals Engineering, 175(4):197-207.
Donovan R. P. (1985). Fabric filtration for combustion sources. Marcel Dekker, Inc. New York and Basel, p2.
Franz, M. and Franzreb, M. (1998). Determination of the capture radii of magnetic bearing hydroxide flocs in magnetic filtration. IEEE Transactions on Magnetics, 34: 3902–3906.
Friedlander, S. K. (2000). Smoke, dust, and haze. Oxford university press: New York, p31.
Gerber, R. and Birss, R.R. (1983). High gradient mag- netic separation. John Wiley: New York, p329.
Hirschbein B. L., Brown D. W., and Whitesides G. M.
(1982). Magnetic separations in chemistry and biochemistry. Chemtech, 12:172-179.
Lee, K.W. and Liu B.Y. H. (1982). Theoretical study of aerosol filtration by fibrous filters. Aerosol sci- ence and technology, 1: 147-166.
Lin Li , Paul S. Greenberg , Kenneth W. Street Jr. &
Da Ren Chen (2011). Study of a magnetic fil- ter system for the characterization of particle magnetic property. Aerosol Science and Technology, 45:3, 327-335.
Loeffler F. (1978). The influence of electrostatic forces and of the probability of adhesion for particle
collection in fibrous filters. Novel concepts, methods and advanced technology in par- ticle-gas separation, University of Notre Dame, Notre Dame. p206-230.
Lucchesi P. J., Hatch W. H., Mayer F. X., and Rosensweig R. E. (1979). Magnetically stabi- lized beds—new gas-solids contacting technology. In proceedings of the 10th world petroleum congress, 4: 419-425.
Parker M.R. (1977). The physics of magnetic separation.
Contemporary Physics, 18: 279-306.
Sarikaya M., Abbasov T. & Erdemolu M. (2006). Some aspects of magnetic filtration theory for re- moval of fine particles from aqueous suspensions. Journal of Dispersion Science and Technology, 27: 193-198.
Svoboda, J. (2001). A realistic description of the process of high gradient magnetic separation. Minerals Engineering, 14: 1493–1503.
Watson J.H.P. (1973). Magnetic filtration. Journal of Applied Physics, 44:4209-4213.
Yavuz Cafer T. et al. (2006). Low-Field Magnetic Separation of Monodisperse Fe3O4 Nanocrystals.
Science, 314: 964-967.
Ying T.Y., Yiacoumi S, Tsouris C (2000). High-gradient magnetically seeded filtration. Chemical Engineering Science, 55:1101-1113
Zarutskaya, T., and Shapiro, M. (2000). Capture of nano- particles by magnetic filters. Journal of Aerosol Science, 31(8):907–921.