Issue
첨단기술을 이용한 3차원 하천정보 조사기술
02
1. 배경 및 목적
자연환경 기후변화 및 4대강 살리기 사업 등으로 인해 하천 내 수리·수문현상의 많은 변화가 예상되 고 있으며, 그 중에서 하천지형정보는 하천관리를 위해 요구되는 다양한 하천 정보의 기초가 되며 하 천 내 수리·수문현상을 이해하고 예측하는데 필수 적인 자료이다. 이러한 기술수요에 부응하기 위하여 2011년 12월부터 “첨단기술기반 하천 운영 및 관리 선진화 연구단”이 구성되어 4차년도 사업에까지 이 르고 있다. 본 저자는 연구단의 여러 과제 중 “첨단 기술을 이용한 하천조사기술 개발”에 참여하여 최신 의 원격탐측 방법을 이용하여 하천의 유량, 유속, 수 질 등 수리·수문자료와 하천의 3차원 지형정보를 취득하고 표출하는 기술을 개발하고 있다. 본고에서
는 그 중 3차원 하천지형정보를 취득하고, 정확도를 검증한 연구를 소개하고자 한다.
지속적으로 진행되고 있는 정보화 사회로의 이전 은 급속한 IT 기술의 발전과 함께 그 속도를 더하고 있다. 휴대전화와 무선 인터넷 등 과거에 비해 쉽게 정보에 접근 할 수 있는 사회자본이 갖춰지며 자원 관리, 재해 관리 등 행정적 요구뿐만 아니라 일상생 활에 필요한 정보에 대한 요구도 증가하고 있다. 이 러한 요구에 맞춰 정보를 신속하고 정확하게 생산, 가공, 제공하기 위한 연구가 진행되고 있으며 특히 지형공간을 기반으로 한 정보를 생산하기 위한 연구 가 활발하게 진행되고 있는데 그 대표적인 예가 원 격 탐측이다. 원격 탐측은 사람이 측정하고자 하는 위치에서 지점의 공간정보를 취득하던 재래식 측량 방법에서 벗어나 레이저, 전파, 가시광선, 음파 등 을 이용하여 원거리에서 넓은 면적의 공간정보를 디 지털화된 데이터로 취득하는 방식이다. 원격 탐측은 측정하고자 하는 공간을 구성하고 있는 매질의 물리 적 특성에 따라 적합한 방식이 결정되므로 공기와 물처럼 물리적 특성에 차이가 큰 공간을 측정하기 위해서는 서로 다른 방식을 사용하게 된다.
물을 매질로 갖는 하상지형자료 취득을 위한 원격 탐측은 대부분 GPS(Global Positioning System)와 음향 측심기를 조합한 형태로 구성되어 있다. GPS 를 이용하여 하천면의 평면 좌표를 결정하고 결정 된 좌표의 수심을 음향 측심기를 이용하여 측정하는 정 창 삼 ●●●
인덕대학교 토목환경설계과 교수 [email protected]
안 정 환 ●●●
인덕대학교 박사후연구원 [email protected]
방식이다. 공기를 매질로 갖는 일반지형자료 취득 을 위한 원격탐측은 LIDAR(LIght Detection And Ranging), 레이저스캐너, 위성영상, 항공영상 등을 이용하는 방법이 주로 사용되고 있다. LIDAR, 레이 저스캐너, 위성영상, 고고도 항공기를 이용한 항공 영상 등은 중·소규모의 현장에 적용하기에는 제한 이 많고 장비를 운용하기 위해 소요되는 비용이 고 가이며, 운용을 위한 날씨와 위치 등의 조건이 까 다롭다. 따라서 최근 중·소규모의 원격탐측에는 저고도 무인항공기(UAV, Unmanned Airborne Vehicles)를 이용한 사진측량 방법이 많이 이용되고 있는데 재해관측을 위한 탐측방법에서 시작하여 3 차원 지형자료 취득에도 활발하게 적용되고 있다.
본고에서는 물리적 특성 차이가 큰 두 가지 매질 로 구성된 하천에 대하여 저고도 UAV와 음향측심 기를 장착한 무선조종보트를 조합하는 방법으로 신 속하고 정확하게 3차원 공간정보를 취득하는 시스 템을 소개하고 낙동강 강정고령보에 실제 적용한 사 례를 바탕으로 그 활용가능성을 제시하고자 한다.
2. 3차원 하천정보 조사 시스템
하천은 물이 흐르는 저수부와 홍수시를 제외한 시
기에는 물이 흐르지 않는 고수부로 구성되어 있는데 각각의 구성부를 측정하는 방법이 상이하다. 물과 공기의 밀도, 반사율, 굴절율 등 물리적 조건의 차이 로 인해 공기 중에서는 전파, 레이저, 가시광선 등을 이용하는 원격탐측방법이 사용되는 반면, 수중에서 는 음파를 이용하는 방법이 주로 사용된다. 따라서 하상과 고수부의 지형정보 취득에는 서로 다른 계측 장비를 이용할 수밖에 없다. 본 연구에서는 하상표 고 측정에는 음향측심기 (ADCP, Acoustic Doppler Current Profiler)와 무선조종보트 (R2V2, River Roboat for Velocity & Volume), 고수부에는 디지 털카메라와 무인항공기를 이용한 사진측량 방법을 적용하였다 (그림. 1).
최근에 활용되고 있는 계측 장비는 대부분 GPS를 활용하고 있으며 다양한 형태의 지구타원체, 좌표계 로 계측자료를 변환하여 제공하지만 서로 다른 계측 장비를 이용하여 수집된 자료를 하나의 좌표계 내에 서 정합하기 위해서는 평면위치 보정을 위한 기준 점과 고도 보정을 위한 기준면이 요구된다. 두 계측 자료의 정합을 위해 계측 대상 구간의 인근에 위치 한 4대강 사업에서 사용된 측량 기준점을 이용하여 GPS 보정을 실시하고 보정된 GPS를 이용하여 고도 기준면이 될 계측 시점의 수위를 계측하고 그 수위 를 이용하여 음향측심기를 통해 계측한 수심을 표고
그림 1. 3차원 하천지형정보 측정 시스템
로 변환하였다.
2.1 하상지형 측정
본 연구에서는 3차원 하상측정을 위해 9개의 Transducer가 내장되어있는 M9 센서를 이용한 ADCP와 R2V2을 이용하였다. R2V2는 하천을 자 유롭게 이동하며 유속, 유량, 하상단면 등을 측정 할 수 있는 하천유량 계측보트로 RTK-GPS 모듈을
장착하여 정밀한 위치측정이 가능하다. 3차원 하상 을 측정하기 위해서는 그림 2와 같이 2차원 평면상 의 정확한 위치와 하상에 대한 수직방향 측정이 요 구된다. ADCP에서 자체적으로 생산되는 Bottom Tracking 정보는 하천에서 저질의 이동이 없을 때 정확하게 측정위치를 추적할 수 있지만 저질이 이동 하거나 측선거리가 한계를 초과할 경우에는 R2V2 에 탑재한 RTK GPS를 이용하여 생성한 위치정보 를 2차원 평면상의 위치자료로 결정한다.
그림 2. R2V2의 위치결정 체계
2.2 고수부 측정
고수부 측정에는 디지털카메라를 장착한 고정익 UAV(그림 3)를 이용한 사진측량방법을 적용하였다.
UAV는 군사적 목적에서부터 레저용에 이르기까지 다양한 분야에서 활용되고 있는 사람이 탑승하지 않 는 항공기를 통칭한다. 비행방법에 따라 고정익과 회 전익으로 구분되는데 고정익 UAV는 작업속도가 빠 르고 넓은 면적에 적용이 유리하여 회전익에 비해 작 업 생산성이 높은 반면 이·착륙을 위한 공간이 필 요하고 안전규정에 따라 초저고도 (100 m 이하) 비 행이 불가능한 단점이 있다. 본 연구에서는 이·착
륙 공간이 확보되어 있으며 대상 면적이 비교적 넓은 하천지형의 특성에 따라 작업 생산성이 높은 고정익 UAV를 적용하였다. 고정익 UAV는 최소 1인으로 운 용이 가능하며 저가의 장비인 일반 디지털카메라를 이용하여 지형영상을 취득한다. 약 80%의 중복도를 갖는 지형영상을 이용하여 정사영상을 제작하고 스 테레오 영상처리로 표고모델을 작성한다.
3. 적용
현장측정은 낙동강의 강정고령보 하류부 약 1km
구간에 대하여 수행하였으며, R2V2를 이용한 하상 지형 측정자료와 UAV를 이용한 고수부 측정자료를 정합하여 3차원 하천지형도를 작성하였다. 서로 다 른 장비를 이용한 측정결과이므로 정합을 위한 고도 기준면이 필요한데, 본 연구에서는 4대강 살리기 사 업에서 설치한 측량 기준점을 이용하여 GPS 보정을
실시하고 보정된 GPS를 이용하여 측정한 수심을 고 도기준면으로 설정하고 두 측정자료를 정합하였다.
그림 4는 본 연구의 대상지역인 낙동강 강정교령보 하류부 약 600 m 구간과 적용한 측량 기준점의 위 치 및 정보이다.
그림 3. UAV와 비행 모니터링 시스템
(a) 측정대상 구간 (b) 측량기준점
그림 4. 측정대상구간과 측량기준점의 정보
측정된 3차원 하천 지형자료를 Global Mapper를 이용하여 3차원으로 표출하였다. 기존의 하천측량 방법으로는 저수부 측정을 위한 보트가 하천변에 접 근 할 수 있는 한계(수심 약 30 cm)가 있고, 고수부 측량 방법으로는 물과 닿는 부분은 측정할 수 없기 때문에 3차원으로 표출 할 경우 경계부에서 단절부 가 발생 할 수밖에 없다. 본 연구에서 적용한 UAV
를 이용한 고수부 측정 방법은 수심 약 30 cm의 물 속까지 지형의 고도 측정이 가능하므로 저수부와 고 수부 사이 측정자료의 단절부가 존재하지 않는다.
그림 5는 본 연구의 대상지역인 낙동강 강정고령보 하류 약 600 m 구간의 하천을 3차원으로 표출한 하 상과 고수부 지형이 통합된 3차원 하천지형도이다.
그림 5. 하상지형과 고수부 지형이 통합된 3차원 하천지형도
4. 측정자료의 정확도 평가
측정방법의 정확도를 평가하기 위해 공인된 지형 정보자료 및 공인된 측정방법으로 측정된 지형정 보자료와의 비교를 수행하였다. 공인된 지형정보 자료로는 2013년에 제작된 수치지형도를 활용하였 으며 공인된 측정방법으로 측정된 지형정보자료는 Multi-Beam Echo Sounder로 측정한 하상고 자료 와 Total Station으로 측정한 고수부 표고를 활용하 였다.
4.1 수치지형도와 비교
3차원 지형정보는 2차원 평면위치를 기반으로 비 교해야하므로 측정된 3차원 하천지형정보를 수치지
형도의 좌표계와 일치시키고 중첩시킨 후 평면상의 일치도를 분석하였다. 그림 6에서 실선은 수치지형 도의 지형정보이고 본 연구에서 측정한 지형정보는 색상으로 표현되어 있다. 보의 상·하류부의 노이즈 는 물보라로 인한 것이며 회색으로 표시된 보 구조 물을 살펴보면 실선과 색상이 정확히 일치하는 것을 알 수 있다.
하상고 및 표고 비교는 수치지형도에 표시되어 있 는 표고점을 같은 위치의 측정자료 표고와 비교하는 방법으로 수행하였다.
그림 7의 (a)는 수치지형도 중 제내지에 표시되어 있는 23개 표고점을 본 연구에서 측정한 동일 위치 의 표고와 비교한 그림이다. 총 23개 지점 중 18개 지점에서 5% 미만의 오차가 발생하였고 5개 지점 (그림 7의 (a) 중 붉은 색 화살표)에서는 오차가 5%
를 초과하였다. 오차가 5%를 초과한 5개 지점은 모 두 보 관리시설 등 시설물이 위치한 지점으로 수치 지형도에 시설물의 높이가 제대로 반영되지 않은 결 과로 판단된다. 이상자료 5개 지점을 포함한 전체자 료에 대한 상대오차의 평균은 -4.8%, 이상자료를 제외한 18개 지점에 대한 상대오차의 평균은 -0.8%
로 나타났다.
그림 7의 (b)는 수치지형도 중 제외지에 표시되어 있는 34개 표고점을 본 연구에서 측정한 동일 위치 의 표고와 비교한 그림이다. 총 34개 지점 중 24개 지점에서 5% 미만의 오차가 발생하였다. 제방의 표 고는 정확히 일치했으나 하천측량이 담당해야할 제 방 외측의 10개 지점(그림 7의 (b) 중 붉은 색 화살 표)에서는 큰 오차가 발생하였다. 이상자료를 포함
그림 6. 수치지형도(2013)와 측정자료의 평면 위치 일치 정도
그림 7. 제내지 및 제외지의 표고 비교
(a) 제내지 (b) 제외지
한 전체자료에 대한 상대오차의 평균은 -6.8%, 이 상자료를 제외한 24개 지점에 대한 상대오차의 평 균은 -1.0%로 나타났다.
4.1 공인된 측정방법으로 측정한 지형정보와 비교
국토지리정보원에서 제공하고 있는 수치지형도는 하천측량의 성과가 반영되어 있지 않고 지표면의 표 고점도 제한적으로 제공하고 있어 보다 정밀한 정확 도 검증을 위해 본 연구단에서 공인된 측정방법으로 생산한 측정자료와 비교를 수행하였다. 하상표고 비 교에는 Multi-Beam Echo Sounder로 측정한 표고 를 30m 간격의 격자점으로 구성한 자료를 활용하였 으며, 고수부 지형표고 비교에는 RTK-GPS를 장착 한 Total Station으로 측정한 표고점을 활용하였다.
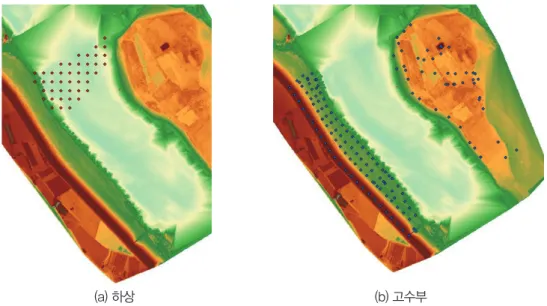
그림 8의 (a)는 Multi-Beam Echo Sounder로 측정한 하상표고를 30m 간격의 격자점으로 추출한
35개 표고점과 본 연구에서 측정한 동일 위치에서의 표고를 비교한 그림이다. 총 35개 지점 중 27개 지 점에서 5% 미만의 상대오차가 발생하였으며 상대오 차의 평균은 3.8%, RRMSE(Relative Root Mean Square Error)는 4.5%였다.
그림 8의 (b)는 Total Station으로 측정한 147개 고수부 지표를 본 연구에서 측정한 동일 위치에서의 표고와 비교한 그림이다. 총 147개 지점 중 136개 지점에서 5% 미만의 상대오차가 발생하였으며 상대 오차의 평균은 2.1%, RRMSE는 3.3%였다.
상대오차를 기준으로 하상표고 3.8%, 고수부 지 표고 2.1%의 오차는 활용목적에 따라서는 즉시 실 무에 적용할 수 있는 수준의 오차이며, 향후 측정방 법의 표준화 및 고도화에 대한 연구가 수행된다면 측량의 방법으로도 활용될 수 있는 가능성이 충분하 다고 판단된다.
그림 8. 공인된 방법으로 측정한 지형정보와 표고 비교
(a) 하상 (b) 고수부
5. 결론
하천지형정보는 하천관리를 위해 요구되는 다양
한 하천 정보의 기초가 되며 하천 내 수리·수문현 상을 이해하고 예측하는데 필수적인 자료이다. 기 존의 하천지형정보 취득 기술은 많은 인력과 시간이
소요되는 노동집약적 기술에 머무르고 있어 광범위 한 지역에 걸쳐 대규모로 진행된 하천 사업의 영향 을 계측하고 관리하기에는 한계가 있다. 본고에서는 첨단기술을 이용한 3차원 하천정보 조사 기술을 통 해 서로 다른 목적에 따라 개발된 두 가지 측정장비 를 활용하여 서로 다른 매질의 공간을 하나의 통합 된 3차원 지형도로 통합하는 방법을 소개하고 그 정 확도 평가를 통해 다양한 분야로의 활용 가능성을 살펴보았다.
본고에서 소개하고 있는 방법은 하천관리를 위한
정보를 3차원으로 입력할 수 있는 Base Map으로 활용될 수 있을 뿐 아니라 최근 브이월드 등을 통해 제공되고 있는 3차원 지형도 제작을 위한 솔루션으 로도 활용될 수 있을 것으로 판단된다.
ACKNOWLEDGMENTS
본 연구는 국토교통부 건설기술혁신사업의 연구 비지원(11기술혁신C06)에 의해 수행되었습니다.