Vol.14, No.3, pp.42-50 (2020)
11.. 서서 론론
위성용 적외선 영상센서의 경우 전자광학 탑재체 (EO; Electro Optical)와 달리 물체에서 방출되는 열적 외선을 감지하여 물체를 구별하기에 야간이나 악천후 에도 관측임무 수행이 가능하다. 그러나 적외선 영상센
우주용 영상센서 출력특성 교정용 흑체 설계의 해석적 유효성 검토
김혜인 1 ·최필경 2 ·조문신 2 ·오현웅 1, †
1
조선대학교 항공우주공학과 우주기술융합연구실2
한화 시스템 기계설계팀Numerical Investigation of Blackbody Design for Spaceborne Image Sensor Non-uniformity Characteristic Calibration
Hye-In Kim 1 , Pil-Gyeong Choi 2 , Mun-Shin Jo 2 , and Hyun-Ung Oh 1,†
1
Department of Aerospace Engineering, Chosun University2
Mechanical Design Team, Hanwha SystemsAbstract
For calibration of the non-uniformity characteristics of the space-borne infrared (IR) sensor, a black body system shall provide estimated representative surface temperature at various reference temperatures by using the limited number of temperature sensors. The black body system proposed in this study has an I/F flange integrated on the rear side of the black body for installation of the heat pipe to transfer the residual heat after the black body heat-up. This design allows for obtaining a circular symmetric thermal contour of black body with low surface temperature gradient, leading to much easier representative temperature estimation.
Additionally, this provides mechanically stable thermal I/F under launch and on-orbit environmental loads, as well as allowing a fail safe design by using the two heat pipes. Also, a highly accurate temperature estimation is possible even if the temperature sensors are attached on the surface on the rear side of the black body. The effectiveness of the thermal design of the proposed black body has been verified through the on-orbit thermal analysis. Based on the results, the representative surface temperature was estimated according to the number and position of the temperature sensors.
초 초 록록
우주용 적외선 센서의 탑재 교정용 흑체 시스템은 궤도상에서 센서 출력특성 교정을 위해 다양한 기 준온도에서 한정된 개수의 온도센서로부터 고정밀의 대표표면온도 추정이 가능해야 한다. 본 논문에서 제안된 흑체 시스템은 흑체 가열 후 잔열 수송을 위한 히트파이프를 흑체 후면 중앙의 일체형 플랜지 에 결합하는 방식을 적용하였다. 따라서 흑체 표면온도구배 최소화와 함께 원형 대칭 형태의 온도구배 를 얻을 수 있어 표면온도 추정이 용이하면서도 발사 및 궤도환경에서 하중이 가해지더라도 안정적인 히트파이프 접속부를 갖도록 하며, 복수의 히트파이프 적용에 따른 Fail Safe 설계가 가능하도록 한다.
또한 온도센서 부착작업이 용이하도록 센서를 흑체 외부 표면에 적용하더라도 높은 정확도로 표면온도 추정이 가능하다. 본 논문에서 제안된 흑체 시스템의 설계 유효성 입증을 위해 궤도 열해석을 수행하였 으며, 해석결과를 기반으로 온도센서 개수 및 위치에 따른 대표표면온도 추정을 실시하였다.
Key Words : Blackbody(흑체), Infrared Sensor(적외선 센서), Non-uniformity(비균일 출력특성), Estimation
Accuracy(추정정확도), Thermal Analysis(열해석)Received: Apr. 08, 2019 Revised: Feb. 07, 2020 Accepted: Feb. 12, 2020
† Corresponding Author
Tel: +82-62-230-7728, E-mail: [email protected]
Ⓒ The Society for Aerospace System Engineering
서는 반복적인 임무수행 및 센서의 구동시간 경과에 기인하여 동일한 광원에 대한 비균일 출력특성이 발생 한다. 센서의 비균일 출력특성은 영상품질을 저하시키 는 주된 요인으로 작용하기에 궤도상에서 고품질의 적 외선 영상데이터 획득을 위해서는 영상촬영 임무수행 전 탑재 교정용 흑체 시스템을 적용하여 비균일 출력 특성 보정 (NUC; Non-uniformity Correction)이 반드 시 수행되어야한다[1-2]. 비균일출력특성의 보정을 위 한 방식에는 일점교정, 이점교정 및 다점교정 등 다양 한 방식이 적용된다. 이 중, 두 온도 지점에서의 검출 기 응답으로부터 보정계수 산출에 있어 높은 정확도와 효율성을 갖는 이점교정법이 널리 적용되고 있다[3].
흑체 시스템의 주된 목적은 흑체 표면에서의 온도균일 화 및 온도센서로부터 흑체의 대표표면온도 추정이 가 능한 고 정밀 대표표면온도 제공에 있다. 흑체는 다양 한 온도 대역으로 적외선 영상센서의 비균일 출력특성 을 보정하기 위해 고온 및 저온의 다양한 온도정보를 제공해야한다. 이를 위해 일반적으로 복수의 흑체시스 템을 탑재한다. 기 개발된 흑체 시스템의 대표적인 예 로, Olschewsk et al. [4-6]은 GLORIA (Gimballed Limb Observer for Radiance Imaging of the Atmosphere)에 탑재된 흑체 시스템으로 저온에서 고 온에 이르는 온도정보 제공을 위해 복수의 흑체를 탑 재하며, 열전 소자를 적용하여 각각 저온 및 고온 온도 정보를 제공한다. Xiong et al. [7-8]은 NASA에서 개 발된 Terra 위성의 기상탑재체인 MODIS (Moderate Resolution Imaging Spectro-radiometer)에 탑재된 흑 체 시스템을 개발하였다. 이는 GLORIA와 마찬가지로 저온 및 고온의 온도정보 제공이 가능한 복수의 흑체 시스템을 탑재한다. 이처럼 종래의 흑체시스템은 복수 의 시스템을 탑재하고 다양한 온도정보를 제공하기 위 해 열전소자 등을 적용함으로써 시스템의 복잡화를 야 기하며, 종국에는 전체 시스템의 무게증가로 이어진다.
상기 흑체시스템의 단점을 보완하고자 Oh et al.
[9-12]은 단일 흑체로 저온에서 고온에 이르는 온도정 보 제공이 가능한 흑체시스템을 제안하였다. 상기 흑체 시스템은 교정 시 흑체 가열을 위한 히터, 흑체 표면온 도 추정용 온도센서, 흑체 가열 후 잔열을 외부로 수송 하기 위한 히트파이프로 구성된다. 이 중, 히트파이프는 흑체 표면에서의 대칭적인 온도구배를 얻기 위해 수직
으로 삽입되며, 효과적인 열전달을 위해 히트파이프 삽 입부에 써멀페이스트를 적용하였으나, 발사하중 및 궤 도 열환경에서의 열변형에 대한 안전성 보장에 있어 낮 은 신뢰도를 갖는다. 또한, 흑체 표면온도 추정을 위한 온도센서가 내장형이기에 흑체 부착 작업이 복잡해지 며, 흑체의 두께 증가가 요구되는 등의 한계점이 존재 한다.
본 연구에서는 종래의 흑체 시스템에 있어 전술한 기 술적 한계 극복이 가능한 흑체 시스템을 제안하였다.
제안된 흑체 시스템은 흑체와 일체형으로 구성된 플랜 지에 히트파이프를 결합하는 구조로, 발사 및 궤도 열 환경에서도 높은 신뢰도의 열수송부를 갖으며, 복수의 히트파이프 적용에 따른 Fail Safe 설계가 가능하도록 하는 것을 특징으로 한다. 또한, 온도센서를 삽입하지 않고 흑체 후면부에 장착된 온도센서를 사용하더라도 정밀한 대표표면온도 추정이 가능한 것을 특징으로 한 다. 본 연구에서는 제안된 흑체시스템의 설계 타당성을 해석적으로 입증하고자 궤도 열해석을 수행하였으며, 이를 통해 제안된 설계가 고온에서 저온에 이르는 교정 온도 정보 제공 및 흑체 표면온도 추정 측면에서 유효 함을 입증하였다.
22.. 본본 론론
22..11 기기존존 탑탑재재 교교정정용용 흑흑체체시시스스템템의의 한한계계점점
종래의 흑체시스템은 Fig. 1과 같이 교정반사경 구동
장치를 이용하여 적외선 영상센서 보정을 수행한다. 영
상센서의 교정을 위해 Fig. 1(a)와 같이 교정 반사경 구
동장치를 전개시켜 흑체를 지향하게 되며, 교정미러를
통해 흑체의 온도정보를 제공받는다. 교정임무 종료 시
Fig. 1(b)와 같이 교정 반사경 구동장치를 수납하여 영
상획득을 위한 주광경로를 확보한다. 이와 같이 적외선
영상센서의 보정을 수행하기 위해 제안된 종래의 흑체
시스템은 적외선 센서가 사용하는 온도 범위인 0 ゚C에
서 40 ゚C에 이르는 온도정보 제공이 가능해야하며 적
외선 영상센서를 균일하게 교정하기 위해 교정구간에서
1 ゚C 이하의 흑체 표면 온도구배가 얻어져야한다. 또
한, 고품질의 적외선 영상 획득을 위해서는 영상촬영
수행 전 한 번의 교정임무가 수행되어야 한다.
(a)
(b)
Fig. 1 Operation Concept for IR Sensor Calibration
((a) Calibration Mode, (b) Imaging Mode) [13]전술한 흑체의 요구조건을 충족시키기 위해 Oh et al. [9-12]은 Fig. 2와 같은 단일 흑체 시스템을 개발 하였다. 상기 흑체 시스템은 교정임무 수행을 위해 기 준온도 정보를 제공할 수 있는 흑체, 고온의 온도정보 제공을 위한 히터, 온도 상승 후 흑체표면을 저온으로 하강시키기 위한 히트파이프와 라디에이터, 표면온도 추정을 위한 온도센서, 원하는 시점에서 언제든지 교 정임무를 수행할 수 있도록 흑체 표면을 일정한 온도 로 유지할 수 있는 방열판 히터, 주변으로 부터의 잡 광을 차단하기 위한 Baffle로 구성되어있다. 그리고 히 트파이프 장착 시 흑체 표면에서 원형 대칭적인 온도 구배를 획득하기 위해 히트파이프의 기화부가 흑체 후 면부 중앙에 수직으로 삽입되며, 흑체와의 원활한 열 교환을 위해 삽입부에 써멀페이스트가 적용되었다. 그 러나 이와 같은 히트파이프 장착 형태는 발사하중 및 궤도상에서의 열변형 하중이 가해질 경우 발생할 수 있는 변형으로 인해 흑체와 히트파이프 간의 접촉 불 량이 발생할 수 있다. 또한, 흑체의 구조 상 하나의 히 트파이프만이 삽입되는 형태이기에 예비용 히트파이프 가 적용이 불가능하다. 따라서 흑체와의 접촉 불량이
발생하거나 히트파이프에 결함이 발생할 경우 전체 흑 체 시스템의 실패로 이어져 영상센서 교정임무 수행이 불가능할 수 있다. 또한 정밀한 흑체 표면온도 추정을 위해서는 온도센서를 흑체 표면에 가깝게 배치하는 것 이 중요하며, 이를 위해 흑체에 삽입되는 형태의 온도 센서를 탑재하였다. 그러나 흑체 내부에 온도센서를 삽입하게 될 경우 센서 부착 시 흑체에 제대로 밀착되 지 않을 수 있으며, 흑체의 두께 및 무게가 증가하는 단점이 존재한다. 따라서 종래에 개발된 흑체 시스템 의 한계점을 극복하기 위해 본 논문에서 제안하는 흑 체 시스템을 개발하였다.
Fig. 2 Conventional Blackbody System [9]
22..22 흑흑체체시시스스템템의의 설설계계 개개요요
본 흑체 시스템의 요구조건은 종래의 흑체시스템과
동일하나, 흑체표면온도 하강구간에서 교정임무를 수행
한다. 본 논문에서 제안된 흑체시스템은 Fig. 3(a)와 같
이 단일 시스템으로 0 ゚C에서 40 ゚C에 이르는 온도정
보를 제공하기 위한 히터, 흑체 표면 가열 후 발생되는
잔열을 위성체 외부로 방출하기 위한 히트파이프 및 방
열판으로 구성되어있으며, 흑체 전면부에는 주변으로부
터의 잡광 차단을 위한 Baffle이 장착된다. 히트파이프
의 경우 Fig. 3(b)와 같이 종래의 삽입형 히트파이프가
아닌 플랜지 체결형 히트파이프를 적용하였다. 이에 따
라 종래의 삽입형 히트파이프보다 흑체와의 접촉 면적
이 넓어지고, 흑체플랜지와 볼트로 체결되기에 발사진동 환경에서도 보다 안정된 열 접속부를 가지며, 보다 높은 신뢰도를 갖게 된다. 또한, 히트파이프가 플렌지에 장착 되는 형태이기에 예비 히트파이프를 포함하여 총 두 개 의 히트파이프가 장착될 수 있으며, 이에 따라 하나의 히트파이프에 결함이 발생하더라도 안정적인 성능 유지 가 가능하다. 아울러, 삽입형 온도센서의 단점을 극복하 기 위해 온도센서를 흑체 후면에 부착하였다. 이를 통해 흑체의 두께를 최소화시키며, 센서 부착 작업 시 종래의 흑체시스템보다 더욱 원활한 작업수행이 가능하다.
흑체의 전면부에는 0.88의 방사율을 갖는 Black Anodizing을 적용하였으며, 흑체 전면부 및 OSR면을 제외한 모든 부분은 다층박막단열재 (MLI, Multi-layer Insulation)가 적용되었다. 아울러, 흑체 표면에서 저온에서 고온에 이르는 온도정보를 제공하 기 위해 Fig. 3(b)와 같이 흑체 후면에 각각 20 W, 35 W의 용량을 갖는 히터를 적용하였다. 또한, 비운 용 시 흑체 표면온도를 일정 온도로 유지하기 위해 방 열판에 10 W의 용량을 갖는 히터가 4장 배치되며, – 15 ゚C에서 –10 ゚C의 온도범위에서 서모스탯으로 제 어된다.
(a)
(b)
Fig. 3 Proposed Blackbody System ((a) Overall
View, (b) Close-up View)Fig. 4 Thermal Mathematical Model of Blackbody
System22..33 열열해해석석 모모델델 및및 해해석석조조건건
Figure 4는 제안된 흑체시스템의 설계 요구조건 충 족 여부를 검토하고자 구축된 흑체시스템의 열해석 모 델을 나타낸다. 상기 열해석 모델은 적외선 센서 교정 용 흑체와 흑체에 열적 영향을 미치는 구성품으로 구 성되며, 흑체와 흑체방열판 사이의 히트파이프는 열모 델 단순화를 위해 별도의 모델링 없이 열전달 수치를 계산하여 Conductor로 모사하였다. 열해석에 사용된 재료 물성치 및 열적 광학 물성치를 Table 1에 나타 내었으며, 본 흑체시스템에 적용된 히터의 용량 및 On/Off 설정치를 Table 2에 나타내었다. 또한, 해석 시 적용된 Worst Hot 및 Cold에서의 궤도 조건은 Table 3과 같다. 상기 열해석 모델을 통해 흑체의 요 구조건 만족 가능성 판단을 위한 성능 분석을 수행하 였다. 또한, 흑체 후면에 장착되는 온도센서의 위치 및 개수에 따른 표면온도 추정정확도를 분석하였다.
상기의 열해석 모델 구축 및 열해석은 상용 소프트
웨어인 Thermal Desktop[14]과 RadCAD로 구축되었
으며, SINDA/FLUINT[15]를 통해 온도분포 해석을
수행하였다. 구축된 열해석 모델의 총 노드 수는 407
개이며, 히터의 발열을 모사하기 위한 Heater 및
Heat Load는 6개이다. 또한, 모델링 구축 시 각 구성
품간의 접촉을 모사하는 Conductor는 13개이다.
IItte em m T To otta all H He ea att D
Diis ss siip pa attiio on n [[W W]]
O On n//O Offff S
Se ett- -p po oiin ntt [[ ゚゚CC]]
BB Inner 20 -
Outer 35 -
Radiator 40 -15/-10
Table 2 Heat Dissipation & On/Off Set-point of
HeaterP
Pa arra am me ette err O Orrb biitt C Co on nd diittiio on n W
Wo orrs stt H Ho ott W Wo orrs stt C Co olld d Inclination [deg] 97.64
Period [sec] 5,752.67 Solar Flux [W/m
2] 1,420 1,284
Albedo 0.35 0.3
IR Flux [W/m
2] 249 227 Table 3 Orbit Parameter of Blackbody
-15 -10 -10 10 20 30 0
40
Heatpipe Normal OperationOne Heatpipe Failure
100,000 102,000 104,000 106,000 108,000
Te m pe ra tu re ( C)
oTime (sec) Blackbody
Radiator Cooling Range (Calibration Region) Heating
Range
Fig. 5 Temperature Profiles of Blackbody System at
Worst Cold Case22..44 열열해해석석 결결과과
Figure 3과 같이 구성된 흑체의 열설계 타당성을 검
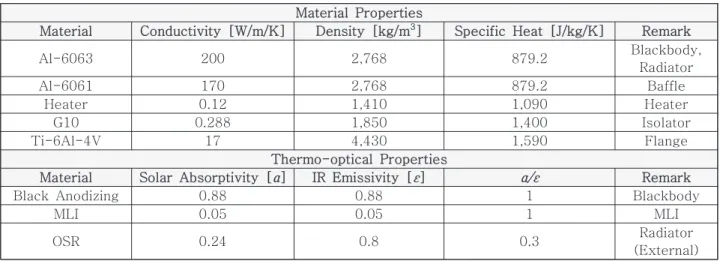
증하기 위해 구축된 열해석모델을 통해 궤도 열해석을 수행하였다. Figure 5는 두 개의 히트파이프가 모두 정상작동 할 경우 Worst Cold 조건에서 흑체표면의 온도프로파일을 나타낸다. 히트파이프가 모두 정상 운 용될 경우, 흑체 가열 시 42.1 °C까지 표면온도 상승 이 가능하며 0 °C로 회복되기까지 약 2,687초가 소요 됨을 알 수 있다. 또한, Worst Cold 조건에서 흑체의 표면온도가 상승 및 하강 구간에서의 흑체의 표면온도 구배를 Fig. 6에 나타내었다. Figure 6(a)는 흑체온도 상승구간에서의 온도구배를 나타내며, 최대 0.32 °C의 온도차를 보인다. 또한, 하강구간에서의 온도구배는 Fig. 6(b)과 같으며, 최대 0.56 °C의 온도구배를 나타 낸다. 이와 같이 본 흑체는 표면온도 상승구간에서 낮 은 온도구배를 보이지만 온도센서를 활용하여 표면 전 체의 온도분포를 고려한 추정정확도를 극대화하기 위 해서는 각 센서에 가중치를 적용하고, 흑체 표면에서 원형 대칭 형태의 온도분포가 획득되어야 한다. 따라 서 본 흑체 시스템에서는 원형 대칭 형태의 온도구배 가 획득되는 온도 하강구간에서 교정임무를 수행한다.
추가적으로, 흑체의 뒷단에 결합되어있는 두 개의 히트파이프 중 하나의 히트파이프에 결함이 발생할 경 우에 대한 해석을 수행하였다. 해석 결과를 Fig. 5에 나타내었으며, 히트파이프에 결함이 발생하더라도 흑 체의 표면온도는 42.12 °C까지 온도상승이 가능하고 흑체의 표면온도가 0 °C로 회복되는 시간은 3,057초 이다. 이에 따라 히트파이프 정상운용 시와 하나의 히 트파이프 파손 시 모두 목표로 하는 온도까지 흑체 표 면온도 상승이 가능하며, 두 궤도 내에 한 번의 교정 M
Ma atte erriia all P Prro op pe errttiie es s M
Ma atte erriia all C Co on nd du uc cttiiv viitty y [[W W//m m//K K]] D De en ns siitty y [[k kg g//m m
33]] S Sp pe ec ciiffiic c H He ea att [[JJ//k kg g//K K]] R Re em ma arrk k
Al-6063 200 2,768 879.2 Blackbody,
Radiator
Al-6061 170 2,768 879.2 Baffle
Heater 0.12 1,410 1,090 Heater
G10 0.288 1,850 1,400 Isolator
Ti-6Al-4V 17 4,430 1,590 Flange
T
Th he errm mo o- -o op pttiic ca all P Prro op pe errttiie es s M
Ma atte erriia all S So olla arr A Ab bs so orrp pttiiv viitty y [[
αα]] IIR R E Em miis ss siiv viitty y [[
εε]]
αα//εεR Re em ma arrk k
Black Anodizing 0.88 0.88 1 Blackbody
MLI 0.05 0.05 1 MLI
OSR 0.24 0.8 0.3 Radiator
(External)
Table 1 Thermal Properties used for Analysis
임무 수행이 가능할 것으로 판단된다. 또한, 히트파이 프 결함 시에도 흑체의 표면온도 상승구간에서는 비대 칭적인 온도구배가 나타나지만, Fig. 6(c)와 같이 흑체 표면온도 하강구간에서 원형 대칭 형태의 온도구배가 얻어지며, 최대 0.55 °C의 온도차가 나타난다. 이를 통해 하나의 히트파이프에 결함이 발생하더라도 모든 요구조건을 충족하며, 안정적으로 흑체의 성능을 유지 할 수 있음을 확인하였다.
(a)
(b)
Fig. 6 Temperature Distribution on Blackbody Surface
(c) in Worst Cold Case ((a) Heating Range, (b) Cooling Range, (c) One Heatpipe Failure Case at Cooling Range, AT: Average Temperature of Blackbody Surface, ∆T: Temperature Difference on Surface)Fig. 7 Candidate Position of Temperature Sensor
아울러, 흑체 표면온도를 정밀하게 대변할 수 있는 온도센서의 위치를 도출하기 위해 Fig. 7과 같이
T1 부 터
T10 까지 10군데의 온도센서 부착 지점을 선정하였 다. 이는 전술한 바와 같이 흑체의 표면 온도는 하강 구간에서 원형 대칭 형태의 온도분포가 나타나기에 반
Unit : °C A
Av vg g.. T Te em mp p..
o
on n B BB B S Su urrff.. T T
11T T
22T T
33T T
44T T
55T T
66T T
77T T
88T T
99T T
11004
40 0..0 03 3 35.96 38.99 39.65 39.91 4 40 0..0 05 5 40.12 40.17 40.19 40.18 40.14 3
30 0..0 01 1 26.83 29.19 29.71 29.92 3 30 0..0 02 2 30.09 30.13 30.15 30.15 30.13 1
19 9..9 99 9 17.51 19.35 19.75 19.91 2 20 0..0 00 0 20.05 20.08 20.10 20.11 20.10 9
9..9 99 9 8.13 9.51 9.81 9.93 1 10 0..0 00 0 10.04 10.06 10.08 10.08 10.08 0
0..0 00 04 4 -1.091 -0.283 -0.105 -0.034 0 0..0 00 05 5 0.029 0.045 0.055 0.061 0.064
Table 4 Sensor Temperature at Worst Cold Case
지름길이방향을 따라 온도센서 부착지점을 선정하였 다. 흑체의 표면온도 추정정확도는 흑체표면 가열 후 교정임무를 수행하는 하강구간에서 흑체 표면온도와 온도센서간의 차이로 계산되며, 온도센서의 출력값은 온도센서가 배치되는 노드에 대한 온도를 통해 흑체의 표면온도 추정을 수행하였다. 히트파이프 정상작동 시 Worst Cold 조건에서 흑체의 표면온도와 센서 위치의 노드에서 도출되는 온도를 Table 4에 나타내었다. 10 개의 온도센서 중 중간지점에 위치한
T5 에서 흑체 표 면의 평균온도와 가장 유사한 온도가 나타나기에
T5 를 사용하여 흑체의 표면온도를 추정하였다. 우선적으로 센서에 가중치를 적용하지 않고 센서 자체의 온도만으 로 흑체의 표면온도 추정을 수행하였으며, 흑체의 표 면온도 추정 결과 Worst Hot 및 Cold 조건에서 모두 최대 0.02 °C의 추정정확도를 나타낸다.
그러나 흑체의 표면온도 추정에 있어 더욱 정밀하게 추정하기 위해서는 각 센서에 가중치를 적용하여 흑체 의 표면온도를 대변하여야한다. 또한, 전술한 바와 같 이 흑체의 표면온도구배는 대체로 세 구간으로 나타나 기에 더욱 높은 정확도로 표면온도를 추정하기 위해서 는 각 구간에 부착되는 온도센서로 추정을 수행하여야 한다. 그러나 본 논문에서 제안한 흑체의 경우 흑체의 뒷단에 히트파이프 연결을 위한 플렌지가 위치하여 흑 체의 중앙부에는 센서를 부착하기에 어려움이 존재하 기 때문에 비교적 흑체의 외곽에 위치한
T5 ,
T7 을 활 용하여 흑체의 표면온도 추정을 실시하였다. 가중치를 적용한 온도센서를 통해 추정할 수 있는 흑체의 표면 온도는 식 (1)을 통해 산출 가능하다.
×
×
(1) 여기서
Tes 는 센서를 통해 추정된 흑체의 표면온도 를 의미하며,
T5
, T7 는 각 센서의 온도를 의미한다. 이 때 가중치
A,
B,
C는 식 (2)와 같이 회귀분석에서 사 용되는 최소자승법으로 산출이 가능하다.
≡
(2) 여기서
ns 는 추정하기 위한 데이터의 개수이며,
Ts
는 흑체의 표면온도의 평균값이다. 상기의 최소자승법 을 활용하여 도출된 A, B, C 수치는 각각 0.90638, 0.09298, -0.00344이며, 수식을 활용하여 도출된 추 정정확도는 Worst Hot 및 Cold 조건에서 각각 최대
0.0029 °C, 0.0025 °C로 산출되었다. Figure 8은 Worst Hot/Cold 조건에서의 추정정확도를 나타내며, 이를 통해 센서에 가중치를 적용할 경우 더욱 높은 정 확도로 흑체의 표면온도 추정이 가능한 것을 확인하였 다. Table 5는 Worst Hot/Cold조건에서의 열해석 결 과를 나타낸다. 상기 결과를 통해 본 논문에서 제안한 흑체 시스템은 최대 표면온도, 표면온도구배 등의 요 구조건을 만족할 수 있으며, 흑체의 후면에 부착된 온 도센서를 통해서도 높은 정확도로 표면온도를 추정이 가능함을 알 수 있다.
-0.005 0 0.005 0.01 0.015 0.02 0.025
0 10
20 30
40
Ts-T5 (Worst Hot) Ts-Tes (Worst Hot) Ts-T5 (Worst Cold) Ts-Tes (Worst Cold)
Es tim at io n A ccu racy
Average Temperature on BB Surface ( C)
oFig. 8 Estimation Accuracy of Blackbody in
Cooling Range
IItte em ms s W Wo orrs stt H Ho ott W Wo orrs stt C Co olld d Heating Time [sec] 390 411
Operation
Temperature [°C] -8~41.4 -9.7~42.1
∆T max in Cooling
Duration [°C] 0.60 0.56 Cooling Time [sec] 2,892 2,637 Estimation Accuracy
(T
s-T
es) [°C] 0.0029 0.0025 Blackbody Heater
Duty Cycle [%] 6.78 7.14 Radiator Heater
Duty Cycle [%] 14.24 22.76
Table 5 Thermal Analysis Results Summary
33.. 결결 론론
본 연구에서는 국내에서 기 개발된 흑체시스템의 단 점을 보완하고자 단일 흑체시스템으로도 발사 및 궤도 열환경에서도 안정적인 히트파이프 접속부를 갖으며, 온도센서를 흑체에 삽입하지 않고 후면에 부착하더라 도 흑체의 표면온도를 정밀하게 대변 가능한 흑체시스 템을 제안하였다. 제안된 흑체시스템이 궤도 열환경인 Worst Hot 및 Cold 조건에서 흑체의 성능분석을 위 해 궤도 열해석을 실시하였다. 해석 결과 흑체 시스템 은 궤도 열환경에서 목표하는 고온 및 저온의 온도정 보를 제공이 가능하며, Worst Cold 조건에서 상승 및 하강 구간에서의 흑체의 표면온도구배는 각각 최대 0.32 °C, 0.56 °C로 나타난다. 상승 구간에서 더욱 낮 은 온도구배를 보이나, 하강구간에서 원형대칭 형태의 온도구배가 나타남에 따라 하강구간에서 교정임무를 수행하는 것이 표면온도 추정 측면에서 센서 가중치 적용 시 높은 추정정확도로 표면온도 추정이 가능할 것으로 판단된다. 아울러, 하나의 히트파이프에 결함이 발생할 경우에도 마찬가지로 온도하강구간에서 원형대 칭형의 온도구배가 얻어지며, 온도구배 또한 0.55 °C 로 획득됨에 따라 히트파이프 결함 시에도 큰 성능변 화 없이 흑체의 운용이 가능할 것으로 판단된다.
또한, 흑체 후면에 장착되는 온도센서의 위치 선정 을 위해 여러 위치에서 흑체의 표면온도 추정을 실시 하였다. 흑체의 표면온도와 가장 유사한 온도가 도출 되는 센서의 위치는
T5 로, 센서값에 가중치 미적용 시 Worst Hot 과 Cold 조건에서 모두 0.02 °C의 추정정 확도를 가짐을 확인하였다. 그러나 센서에 가중치를 적용하게 될 경우 더욱 정확하게 추정이 가능하기에 온도구배가 발생하는 구간 중 센서 부착이 가능한
T5 ,
T7 에 가중치를 적용하여 흑체표면온도를 추정하였으 며, Worst Hot 및 Cold에서 각각 0.0029 °C, 0.0025
°C의 추정정확도를 갖는다. 따라서 센서
T5 ,
T7 에 가 중치를 적용할 경우 하나의 온도센서를 사용할 경우보 다 흑체의 표면온도를 더욱 높은 정확도로 추정이 가 능하였다. 따라서 본 논문에서 제안한 흑체 시스템은 모든 요구조건을 충족이 가능하며, 흑체의 후면부에 부착된 온도센서를 활용하더라도 높은 정밀도로 흑체 의 표면온도 추정이 가능함을 입증하였다.
RReeffeerreenncceess
![Fig. 2 Conventional Blackbody System [9]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5101348.326639/3.892.470.797.440.782/fig-conventional-blackbody.webp)