Article
Double Gyre
모형 해양에서 앙상블 칼만필터를 이용한 자료동화와 쌍둥이 실험들을 통한 민감도 시험김영호
1*
·유상진2
·최병주3
·조양기4
·김영규5
1한국해양연구원 기후·연안재해연구부 (425-600) 경기도 안산시 안산우체국 사서함 29
2기상청
(156-720) 서울시 동작구 기상청길 45
3군산대학교 해양학과
(573-701) 전라북도 군산시 미룡동 산 68
4전남대학교 지구환경과학부 (500-750) 광주시 북구 용봉동 333
5국방과학연구소
(645-600) 경상남도 진해시 사서함 18
Implementation of the Ensemble Kalman Filter to a Double Gyre Ocean and Sensitivity Test using Twin Experiments
Young Ho Kim 1* , Sang Jin Lyu 2 , Byoung-Ju Choi 3 , Yang-Ki Cho 4 , and Young-Gyu Kim 5
1
Climate Change & Coastal Disaster Research Department, KORDI Ansan P.O. Box 29, Seoul 425-600, Korea
2
Korea Meteorological Administration Seoul 156-720, Korea
3
Department of Oceanography
Kusan National University, Gunsan 573-701, Korea
4
Department of Oceanography
Chonnam National University, Gwangju 500-757, Korea
5
Agency for Defense Development Jinhae P.O. Box 18, GyungNam 645-600, Korea
Abstract : As a preliminary effort to establish a data assimilative ocean forecasting system, we reviewed the theory of the Ensemble Kamlan Filter (EnKF) and developed practical techniques to apply the EnKF algorithm in a real ocean circulation modeling system. To verify the performance of the developed EnKF algorithm, a wind-driven double gyre was established in a rectangular ocean using the Regional Ocean Modeling System (ROMS) and the EnKF algorithm was implemented. In the ideal ocean, sea surface temperature and sea surface height were assimilated. The results showed that the multivariate background error covariance is useful in the EnKF system. We also tested the sensitivity of the EnKF algorithm to the localization and inflation of the background error covariance and the number of ensemble members. In the sensitivity tests, the ensemble spread as well as the root-mean square (RMS) error of the ensemble mean
*Corresponding author. E-mail : [email protected]
was assessed. The EnKF produces the optimal solution as the ensemble spread approaches the RMS error of the ensemble mean because the ensembles are well distributed so that they may include the true state. The localization and inflation of the background error covariance increased the ensemble spread while building up well-distributed ensembles. Without the localization of the background error covariance, the ensemble spread tended to decrease continuously over time. In addition, the ensemble spread is proportional to the number of ensemble members. However, it is difficult to increase the ensemble members because of the computational cost.
Key words : data assimilation, Ensemble Kalman Filter, ocean modeling, ensemble spread, localization and inflation of the background error covariance
1. 소 개
해양예보체계란해양수치모델 결과와관측자료를이용 하여현재에가장가까운해양의상태를추출하고수치모 델에 입력한 후해양의 현재와 미래를예측하는 기술이 다
.
수온,
염분및해류등해양의물리적특성을예측·예보함으로해군작전에응용할수있으며
,
자연재해및해난사고에신속히대응할 수있는 기초자료를제공함으 로해양의안전적및효율적이용에기여할수있다
.
해양예보체계를이용하여광범위한해역에준관측장에해당하 는고해상도해양자료를생산함으로써
,
엘리뇨와같은수년주기의기후변동뿐아니라십년이상의장주기적인기 후변화에대한원인을파악하고예측하는연구에자료동
화기법이필수적인수단이되고있다
(Smith 2006).
그리고해양예보체계는해양물리적특성이해양생태계에미치 는영향을고려하여해양생태계의보호및복원과해양 오염물질의확산과정연구와 방재를포함한해양환경문 제를해결하는데응용되고있다
(Bahurel
et al.2006).
이와같이다양한분야에해양예보체계가응용될수있어 그경제적인가치 및중요성이 크다고할수있다
.
예보체계를현업에적용하기시작한지반세기가지난 기상분야와는달리해양분야의예보체계는기초적인수준 에머무르고있다
.
그첫번째 요인은대기분야에비해부족한실시간해양관측자료이다
.
해양관측자료가부족하다보니지금까지해양모델은 수십년동안수집되었던 자료로부터얻은월평균이나연평균자료를입력자료로 이용하여지금까지알려진해양현상의재현이나역학적인 해석에주로사용되어왔다
.
최근해양변동을관측하고예측하기위해전지구해양자료동화실험
(GODAE; Global Ocean Data Assimilation Experiment)
등의일환으로 국제공동관측망이구성되어획득된자료를실시간으로배 포하기 시작하면서자료동화에대한 관심과수요가커지 고있다
.
인공위성을이용하여광범위한영역의해수면온도
,
해면고도및해상풍을관측하고있으며, ARGO
라는profiling float
를이용하여대양의수온염분수직구조를실시간으로관측하고있다
.
또한,
컴퓨터성능향상으로사실적인고해상도해양순환모델들이개발되었고
,
이로인해 해양예보체계의실현가능성은 더욱높아졌다
.
기본적으로 수치모델을 이용한 예보는 초기값 문제
(initial value problem)
이다(Bjerknes
et al.1934).
즉,
해양의현재 상태에대한 추정이주어지면모델은해양의시 간적변화를모의
(
예보)
한다.
예보모델을위한초기값을결정하는것은매우중요하면서도복잡한문제이다
.
이를위해자료동화의개념이정립되었고
,
그자체로서한과학분야를이루고있다
(Daley 1991).
넓은의미에서자료동화는공간적으로 불규칙하게배치된관측점에서얻은 관 측자료들을모델 격자점에할당하기위한 가중치를결정
하는객관분석
(objective analysis)
과 모델의변수들과적절한균형을이루게 만들어주는초기화과정
(initialization)
이복합된개념이다
.
따라서,
자료동화기법연구분야는해양예보체계를수립하기위해필수적으로선행되어야할 연구주제이다
.
국내에서는안등(2005)
이해양대순환모형의초기장을 생산하기위해공간필터를 사용한변분법
을적용한예와송등
(2000)
이조석모델에변분동화기법을적용한 예가있다
.
그러나,
지금까지국내에서는 해양현상을관찰하고순환역학을이해하기위한 수치모델연 구가주로이루어졌으며해양자료동화기법에대한기초적 인연구가부족하여국내및국제공동관측망구성과더 불어자료동화기법과예보모델에 대한연구가 시급한실 정이다
.
자료동화기법으로단순한내삽
/
외삽(interpolation, extrap-
olation)
과 너징(Nudging)
의 방법에서부터 변분동화기법(variational method)
이나 칼만필터(Kalman Filter)
까지다양한방법이시도되어왔다
.
관측자료를이용하여모델의격자별자료를구성하기위해서는객관분석법
(Objective
analysis)
이요구된다.
초기에는모델결과를시공간적으로불균일한관측자료에맞추는너징방법이이용되었다
.
하지만
,
그과정이객관적이지못하여그결과가통계적으로최적의해
(Optimal solution)
라는 보장이없다.
이를 개선하기 위한객관분석법으로
OI(Optimal Interpolation)
와3
차원변분동화기법(3 dimensional variational assimilation)
이제안되었다
. OI
와3
차원변분동화기법은계산비용이저렴하고통계적으로최적의 해를 얻어내기때문에아직 까지전세계적으로현업에많이사용되고있다
(De Mey and Benkiran 2002).
모델결과와관측자료사이의가중치를결정하는과정이 객관적이며동시에통계적으로최적의해를얻어낼수있 다는장점에도불구하고
, OI
와3
차원변분동화기법은시간적연속성을고려할수없다는점과고려할수있는해양 역학의 범위가제한적이라는 점이 단점으로지적되고있 다
(Weaver
et al.2002).
이러한단점을 극복하기위해일정한시간간격안에관측된모든자료를동시에고려하는
4
차원변분동화기법(4 dimensional variational assimilation)
이개발되었다
(Marotzke
et al.1999). 4
차원변분동화기법을적용하기위해서는수반모델
(Adjoint model)
이필요하다
.
자동으로예보모델코드에서수반모델코드를생성해주는
TAMC(Tangent linear and Adjoint Model Compiler)
와같은프로그램이개발되고있으나
,
수만줄의모델코드를확인하면서수반모델코드를만드는데는어려움이있다
.
또한최적의해를구하기위해서는반복적인계산이필요 한데이때많은연산량이요구된다
.
더욱이지금까지소개한
3
차원변분동화기법과4
차원변분동화기법은모델이완벽하다는가정 하에이루어지므로 모델자체의에러를 고려할 수없다는단점이 있다
(Weaver
et al.2002).
칼만필터
(Kalman Filter)
는배경오차공분산(Background
Error Covariance)
이전단계의분석장으로부터예보모델에의해발전해가는효과적인순차적
(sequential)
자료동화체계이다
.
그러나칼만필터를이론그대로 실제해양자료동화에적용하는데는여러가지어려움이있다
.
첫째,
일반적으로 해양에서사용되는수치모델은비선형항을포함 하고있어서칼만필터를적용하기위해서는선형화하는 작업이필요하다
.
이전시간에추정된격자별자료주위에서수치모델을선형화하는방법을확장칼만필터
(Extended
Kalman Filter)
에서사용하고있으며대부분이방법이해양예보모델에적용되고있다
.
관측자료가시간적으로조밀하게 제공되면칼만필터를이용하여격자별자료를 얻 는데는비선형효과가작아서이방법을적용하는데문제 가적다
.
하지만관측자료의시간간격이크거나,
비선형효과가중요해지는곳에서는그효과를보정해줄필요가 있다
.
이러한선형화의문제는4
차원변분동화기법에서도동일하게발생하는문제이다
.
둘째는칼만필터를적용할때연산량과연산과정중에저장해야할자료량이매우 커배경오차공분산을계산하거나 물리적으로저장할 수 있는한계를벗어나기때문에
,
이방법이그동안기상및해양학 분야에서는관심을얻지 못하였다
.
이러한칼만필터의한계를극복하기위한몇가지대안 들이제시되어왔다
.
배경오차공분산행렬의차원을줄이기위해모델 격자간격을 크게하여 칼만필터를적용하
고거기서 얻은큰격자별자료로부터작은 격자별자료 를
OI
등을통해서얻는reduced-rank Kalman Filter
가있다
(Fukumori and Malanotte-Rizzoli 1995).
경험직교함수로부터얻은고유벡터와주성분
(principal component)
중에서고유치가 큰모드만을선택하여칼만필터를수행하 는방법도적용되고있다
(Cane
et al.1996).
배경오차공분산의시간변화를계산하는연산량을줄이기 위하여배 경오차공분산이시간에따라기하급수적으로정상상태
(steady state)
에이른다는이론을 적용하여매시간마다배경오차 공분산을 계산할 필요가 없는
steady state
Kalman Filter
방법이있다(Fukumori
et al.1993).
다른방법으로는수치모델에 의해발전해가는 제한된수의 앙 상블들로부터직접배경오차공분산을계산하는앙상블 칼만필터
(Ensemble Kalman Filter; Evensen 1994; Burgers
et al.1998)
나,
이와 유사한 방법으로SEEK(Singular Evolutive Extended Kalman Filter)
가 있다(Pham
et al.1998).
그중에서도앙상블칼만필터는
Evensen(1994)
에의해제안되어대기분야에성공적으로 적용된 바가있으며해 양분야에서도 적용범위를 넓혀가고있다
(Brusdal
et al.
2003).
앙상블칼만필터는앙상블멤버에대해수치모델을이용한시간적분만을수행하기때문에복잡한해양모델 이나비선형모델에적용하기가용이하며
,
배경오차공분산을직접 계산할수있기때문에자료동화체계의검증 이나관측망 구성 등다양한적용이가능한것으로알려 져있다
.
본연구에서는 대표적인지역해양모델이라 할수있는
ROMS(Regional Ocean Modeling System)
로구성된단순해양모델에앙상블칼만필터를 적용하고민감도시험을 실시하였다
. Evensen(1994)
에의해제안되고Houtekamer
and Mitchell(1998)
에의해수정된알고리즘을사용하였으며
,
이는2
장에기술하였다. 3
장에서는Double Gyre
순환이형성된이상적인사각형바다에앙상블칼만필터를사 용하여해면수온과해면고도자료를동화한다
.
그리고4
장에서앙상블멤버의개수와배경오차공분산의지역화·팽 창에대한앙상블칼만필터의민감도시험결과를제시한 다
.
마지막으로5
장에서요약과 토의가 이루어진다. 2. 앙상블 칼만필터의 개념
기본 방정식
앙상블칼만필터는앙상블들을이용하여배경오차공분
산을추정하는방법을사용하고있다
.
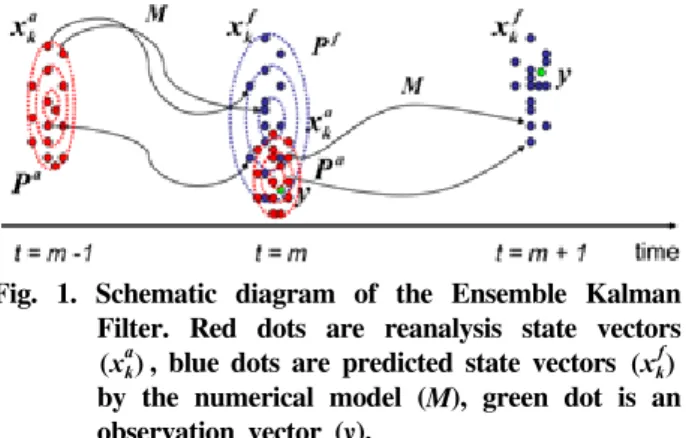
개념도(Fig. 1)
에서보는바와같이자료동화체계에서초기의Ne개의앙상블 멤버들
(
t=
m−1
의적색점들)
은수치모델 M으로부터Ne개의앙상블멤버에해당하는예보장
(
t=
m의청색점들)
을생성하게되며 얻어진예보장으로부터얻어진배경오 차공분산을이용하여주어진관측값 y로부터 Ne개의 앙 상블멤버에해당하는분석장
(
t=
m의적색점들)
을얻게된다
.
얻어진 분석장(
t=
m의적색 점들)
을다시 초기장으로하여모델 M으로부터예보장
(
t=
m+1
의청색점들)
을얻어다음 자료동화를 수행하게된다
.
이를식으로표현하면
,
Ψf와Ψa가예보장(prediction)
과분석장
(analysis)
의상태벡터(state vector)
를나타낼때기본방정식은다음과같다
(Evensen 1994).
(1)
H는관측격자점에서배경장을얻는관측연산자이며K와 di는각각칼만이득행렬
(Kalman gain matrix)
과랜덤함수에 의해교란된관측장을 나타낸다
.
예보배경오차공분산
(
Pf)
과관측오차공분산(
R, obser-
vation error covariance)
으로부터칼만이득행렬은다음과같이얻어진다
(Evensen 1994).
(2)
일반적으로예보배경오차공분산은이를표현하는행렬 의크기때문에추정하거나저장하는것이불가능하다
.
따라서앙상블칼만필터에서는예보배경오차 공분산을모든 격자점에대해직접추정하기보다는칼만이득행렬의계산 을위해관측점에투영한 와 를다음과같 이앙상블들로부터추정하게 된다
.
(3)
(4)
(5)
일반적으로연산자H는선형이라고가정하지만이경
우반드시선형일 필요는없다
.
최초 예측장 는완전한
(
비선형)
수치모델을적분하여 와 같이 직접적으로 얻어진다
.
Mi은 i번째앙상블멤버에적용된수치모델을나타낸다.
위와같이앙상블칼만필터는 Ne개의앙상블멤버에대 해예보모델 M을이용한시간적분만을수행하기때문에 예보모델이나물리적인모수화에대한단순화된모델이나 수반모델등을필요로하지않는다
.
또한Ne개의앙상블 멤버에대해서모든상태변수에대한정보를제공하기 때문에다변수배경오차공분산을고려하는것이용이하 다.
일반적으로상이한변수들간의공분산을나타내는다변수배경오차공분산은역학적인균형이나경험직교함수 등통계적인방법으로추정할 수있지만 사전분석 작업 에어려움이있을뿐아니라객관성을확보하기가쉽지 않다
.
일예로기존의자료동화체계는인공위성으로부터얻어진 해면고도자료
(sea surface height data)
를 수치모델에동화하는데어려움을겪어왔다
.
이는해면고도가인공위성에서관측할수있는해면의특성이지만결과적 으로해양의심층에서일어나는변동까지포함한특성이 기때문에단순히관측된해면고도를수치모델의해면고 도에동화할수없는어려움이있다
.
그러나앙상블칼만필터에서는앙상블들로부터다변수배경오차공분산을추 정하는 것이 용이하며 따라서해면고도자료를 수온이나 유속에 동화하기가 용이하다
. 3
차원 변분동화기법(3 dimensional variational assimilation)
등에서는잠재와도(Potential Vorticity)
의보존과해저면압력이보존된다는가정하에수온과염분의프로파일을수직이동시키는방
법이 제안된바 있다
(Cooper and Haines 1996).
반면에앙상블칼만필터에서는다변수배경오차공분산을계산하 여사용하기때문에역학적인균형을 유지하면서해면고 도를 모델에동화할 수있다
.
배경오차공분산의지역화(Localization of Background Error Covariance)
그러나 앞절에서 기술한 장점에도불구하고 앙상블 칼만필터는 유한의앙상블 멤버를이용하기 때문에 몇 가지문제점이발생하게된다
.
다시말해,
유한의앙상블멤버로구성된배경오차공분산은필연적으로자유도가 저평가되고 서로독립적일 가능성이 큰원거리에 놓여 있는변수간의상관성까지높게추정하는비정상적인형 태를가질수 있어이에대한해결책이 연구되어왔다
.
Gaspari and Cohn(1999)
는이러한자유도의저평가로인한문제를해결하고자배경오차공분산의지역화를적용
하였으며 이를 위하여
Schur Product
를 고안하였다.
Schur Product
는원거리의배경오차공분산을인위적으로낮춤으로자유도를높이는방안이다
. Schur Product
를Ψia=Ψif+K d( i–HΨif)
,
i=1
, ,… NeK P=[ fHT][HPfHT+R]–1
PfHT HPfHT PfHT
1
Ne–
1
---
(Ψif–Ψf)(HΨif–HΨf)Ti 1= Ne
∑
≡
HPfHT
1
Ne–1
---
(HΨif–HΨf)(HΨif–HΨf)Ti 1= Ne
∑
≡
Ψf
1
Ne---
( )Ψif,
HΨfi 1= Ne
∑
N---
e1
–1
(HΨif)i 1= Ne
∑
= =
Ψif Ψif(t+
1
)=Mi[Ψia( )t ]Fig. 1. Schematic diagram of the Ensemble Kalman Filter. Red dots are reanalysis state vectors
, blue dots are predicted state vectors by the numerical model (M), green dot is an observation vector (y).
x
ka( ) ( ) x
kf식
(6)
과같이 정의했을 때 칼만이득행렬은 식(7)
과 같이 주어진다
.
(6)
(7)
위에서 는
3
차원 공간에서 xi와 xj의 거리(
L)
로주어지는함수인 ρ에의해서얻어진다
(
식(6)).
함수 ρ는비상관거리에대한함수로주어지며
3
차원해양순환모델에서는수평비상관거리와수직비상관거리에대해서 함수 ρ가주어질수있다
.
수평비상관거리가600 km
일경우
Gaspri and Cohn(1999)
에 의하여 고안된 함수ρ는
Fig. 2
와 같다.
거리에대한 가우시안(Gaussian)
분포의형태를 나타내며비상관거리에 가까워질수록
0
에접근하고비상관거리이상의거리에대해서는
0
의값을갖는다
.
배경오차공분산의팽창(Inflation of background error covariance)
앙상블 칼만필터를적용함에있어또하나의 문제점으 로는순차적 자료동화를 진행하는동안일어나는배경오 차공분산의붕괴가있다
.
이론적으로예보장의배경오차공분산
(
Pf)
과 분석장의 배경오차 공분산(
Pa)
은 Pa= (
I−KH
)
Pf의관계를유지해야한다.
여기서 I는단위행렬을 나타낸다.
즉,
자료동화를 통해배경오차 공분산은(
I− KH)
정도감소하게되고이는재분석장의오차를줄이는효과를나타낸다
.
하지만표본추출의문제로인하여분석장의배경오차공분산이저평가되는 경향이있다
(Wang
and Bishop 2003).
결과적으로자료동화과정중에앙상블들이과도하게수렴하게됨으로인하여어느순간재분 석장이참값에서급격히멀어지는문제점을가진다
.
이러한문제점을해결하는방안으로
Wang and Bishop(2003)
은배경오차 공분산의팽창을제안하였다
.
Hollingsworth and Lönnberg(1986)
는배경오차와관측오차가상호관계성을갖지 않는다는가정하에관측값의 공분산을배경오차공분산과 관측오차공분산의합으로표 현하였다
.
이에따르면 일반적으로 쇄신벡터(Innovation
vector)
에대해(8)
을만족하게된다
.
이다.
그러나배경오차공분산의저평가로인하여식
(8)
의관계를만족하지않게된다
.
따라서식(8)
을만족시킬수있도록배경오차공분산을팽창시키는방법을생각할수있다
.
즉,
팽창계수 α에대해 다음을만족하게되며
(9)
식
(9)
로부터팽창계수는다음과 같다.
(10)
No는 관측자료의개수이다.
배경오차공분산의붕괴를 막는방안으로관측장의교 란이사용되기도한다
(Burgers
et al.1998).
이방안은주어진관측자료에가우시안분포의랜덤오차를더해각앙 상블에동화하여결과적으로각앙상블들이 수렴하는것 을막는다
.
3. 앙상블 칼만필터의 적용
수치모델개요
본연구에서는
ROMS(Regional Ocean Modeling System)
를이용한 직사각형영역의단순모형에앙상블칼만필터 를적용하였다
.
앙상블칼만필터가단순모형에적용되었으나
,
각모듈들은일반적인해역에적용될수있도록범용성을 갖추도록 하였다
. ROMS
는 정수압근사(Hydrostatic
approximation)
와Boussinesq
근사를기본으로사용하고있다
.
수평적으로는Arakawa C
격자체계를 기초로 직교곡선좌표계를적용하였으며
,
수직적으로자유수면정역학원시방정식을기본으로
S-
좌표계(stretched terrain-following
coordinate)
를적용하였다.
계산시간의효율성을높이기위해 경압모드와 순압모드를 사용한 시간 분할법
(split-
ρ°
b1 1,
..
bi 1,..
bM 1,.. .. .. .. ..
b1 j,
..
bi j,..
bM j,.. . . . ..
b1 M,
.
bi M,.
bM M,ρi j,[L x( i,xj)]×bi j,
=
K=[ρ°(PfHT)] ρ°[ (HPfHT)+R]–1 ρ °B
d′=R–1/2(y Hx– f)
Tr d(〈 ′d′T〉)=Tr H( ′PfH′T+I)
H′=R–1/2H
Tr d(〈 ′d′T〉)=Tr H( ′αPfH′T+I)
α d′Td′–No Tr H( ′PfH′)
---
= Fig. 2 . Gaussian weight function for Schur product to
localize the background error covariance.