http://dx.doi.org/10.5369/JSST.2015.24.1.47 pISSN 1225-5475/eISSN 2093-7563
서포트벡터머신을 이용한 충격전 낙상방향 판별
이정근+
Determination of Fall Direction Before Impact Using Support Vector Machine
Jung Keun Lee+
Abstract
Fall-related injuries in elderly people are a major health care problem. This paper introduces determination of fall direction before impact using support vector machine (SVM). Once a falling phase is detected, dynamic characteristic parameters measured by the accel- erometer and gyroscope and then processed by a Kalman filter are used in the SVM to determine the fall directions, i.e., forward (F), backward (B), rightward (R), and leftward (L). This paper compares the determination sensitivities according to the selected parameters for the SVM (velocities, tilt angles, vs. accelerations) and sensor attachment locations (waist vs. chest) with regards to the binary clas- sification (i.e., F vs. B and R vs. L) and the multi-class classification (i.e., F, B, R, vs. L). Based on the velocity of waist which was superior to other parameters, the SVM in the binary case achieved 100% sensitivities for both F vs. B and R vs. L, while the SVM in the multi-class case achieved the sensitivities of F 93.8%, B 91.3%, R 62.3%, and L 63.6%.
Keywords: Fall direction, Support vector machine, Pre-impact fall detection, Inertial sensor, Accelerometer, Gyroscope
1. 서 론
한국은 현재 세계에서 가장 빠른 노인인구 증가율을 보이는 국가 중 하나로, 2006년도 통계청 ‘장래인구 추계결과’에 따르 면 2050년에는 65세 이상의 노인인구가 전체인구 중 38.2%에 이를 것으로 전망되고 있다. 인구고령화에 따라 현재 낙상(fall) 은 주요한 보건문제로 인식되고 있다. 노인의 경우 낙상으로 인 해 골절 등의 신체적 손상, 기능장애가 발생하면 회복이 쉽지 않 다. 중상을 입지 않은 경우에도 일단 노인이 낙상을 경험하게 되면 낙상에 대한 공포라는 심리적 불안정이 유발되어 독립적 으로 활동하지 않으려는 경향이 생기고 신체활동이 저하되는 등 삶의 질이 저하되는 결과를 초래할 수 있다[1].
이에 고령화 사회를 맞이하는 세계각국은 센서-네트워크 기 술을 활용한 노인복지체계 구축의 일환으로 낙상감지 및 골절 예방을 위한 시스템개발에 노력하고 있다. 이런 노력의 일환으
로 웨어러블 센서 기술(wearable sensor technology)의 관점에서 가속도계(accelerometer) 및 자이로스코프(gyroscope)같은 관성 센서(inertial sensor)를 이용한 자동 낙상감지(automatic fall detection)가 연구되어 왔다[2].
자동 낙상감지는 센서계측된 낙상자의 동특성 파라미터(dynamic characteristic parameter)를 바탕으로 낙상여부를 판단하는 일종 의 이진 분류(binary classification) 문제로서 문턱값(threshold) 을 설정하여 감지하는 방법이 가장 대표적이다[3,4]. 또한 다중 인자의 효율적 활용을 위해 기계학습(machine learning)의 일종 인 서포트벡터머신(support vector machine, SVM)이 낙상감지 를 위해 많이 적용되고 있다[5,6].
최근 낙상 관련연구의 한 방향은 인플레이터블 에어백(inflatable airbag) 같은 신체충격 완화시스템[6,7]인데 이 시스템을 통해 1 차적으로는 골절예방을, 2차적으로는 낙상에 대한 공포해소 효 과를 얻을 수 있다. 이러한 시스템이 효율적으로 작동하기 위해 선 골절피해를 예방할 수 있도록 신체가 지면에 닿기 전에 낙 상을 감지하는 충격전 낙상감지(pre-impact fall detection) 기술 이 필요하며 참고문헌[8,9] 등에 소개되어 있다. 충격전 낙상감 지에 더하여, 낙상의 방향을 인지, 판별하는 것 역시 매우 중요 하다. 왜냐하면 낙상방향을 판별하므로써 낙상방향별로 위험한 골절부위를 파악하고 충격완화 시스템이 이에 대응할 수 있기 때문이다. 예를 들어 측면방향 낙상(sideways collapse)은 대퇴 골 경부골절(femoral neck fracture)을 일으킬 위험이 다른 방향 의 낙상에 비하여 높다[10].
한경대학교 기계공학과(Department of Mechanical Engineering, Hankyong National University)
327 Jungang-ro, Anseong, Gyeonggi 456-749, Korea +Corresponding author: [email protected]
(Received: Nov. 12, 2014, Revised: Jan. 14, 2015, Accepted: Jan. 15, 2015)
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/
licenses/bync/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
낙상방향에 대한 기존 연구로 Tolkiehn 등[10]은 3축 가속 도계의 신호를 바탕으로 정적조건에서의 기울기를 통해 전방, 후방, 측방의 세 방향으로 낙상방향을 판별하였으며 평균 94.1%
의 정확도를 얻었다. 전아영 외[11]는 낙상발생후 1초부터 가 속도계 신호를 분석하고 퍼지분류기를 이용하여 전후좌우 네 방향으로 분류를 하였으며 평균 94.8 %의 정확도를 얻은 바 있다. 이 외에도[12] 등의 낙상방향 판별에 대한 연구가 있으 나 기존연구는 모두 관성센서(=가속도계+자이로)가 아닌 가속 도계만을 이용하여 지면과의 ‘충격후’에 낙상방향이 어떠하였 는지를 판단하는 연구로 낙상후의 진단에 도움을 주기 위한 목적이다.
본 논문은 SVM기법을 이용한 충격전 낙상방향 판별기법을 제시한다. 본 연구를 통해, 낙상방향 분류별(이진분류 및 다중 분류), 센서의 부착위치별(허리 및 가슴), 그리고 SVM의 입력 파라미터별(속도, 기울기, 및 가속도) 분류성능을 확인하고자 한다.
2. 낙상방향 판별법 및 실험방법
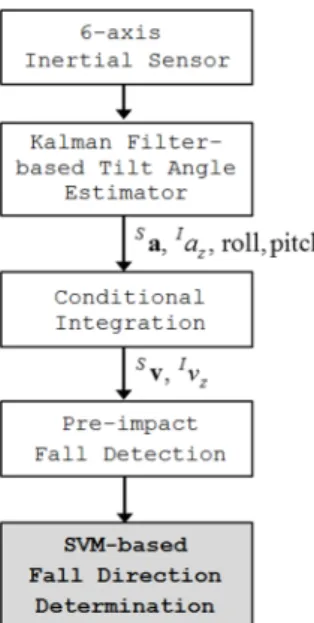
2.1 SVM을 이용한 낙상방향 판별법 2.1.1 낙상방향 판별을 위한 사전 신호처리
이 절에서는 낙상방향 판별을 위해 필요한 6축 관성센서 신 호의 전처리과정을 설명한다.
본 연구에서 사용되는 6축 관성센서는 3축 가속도계와 3축 자이로스코프의 조합이다. 가속도계와 자이로스코프의 센서신호 는 [13]에 소개된 칼만필터에 입력되어 센서의 자세가 구해진다.
여기서의 자세는 구체적으로 수직축 즉, 중력축에 대한 기울기 정보를 갖고 있는 로써 수직방향으로 설정된 고정 관성좌표 계(inertial reference frame)의 Z축 단위벡터를 센서좌표계(sensor reference frame)에서 표기한 것이다. 위첨자 S는 해당 벡터가 센 서좌표계에서 표현되었음을 의미한다. 가 구해지면 낙상탐지
및 낙상방향 판별에 필요한 동특성 파라미터들이 다음과 같이 구해진다. 우선 본 연구에서 기울기 각도 (tilt)와 관련된 파라미 터인 roll과 pitch는 다음과 같다: roll = , pitch =
, 여기서 가 사용되었다.
가속도계의 신호는 Fig. 1에서 보여지는 와 같은 센서
의 자체가속도 에 더하여 중력가속도 가 포
함된다. 위에서 구한 는 와 의 관계를 가짐을
이용하여 가속도계신호에서 를 빼면 를 구할 수 있다.
또한, 낙상방향 판별의 시점을 결정하는 충격전 낙상탐지는 [9]
에 설명된 바와 같이 수직방향 하강속도 를 가지고 판단된 다. 이 수직속도는 수직가속도 를 수치적분하여 얻는 것이므 로 우선 가 필요하며 를 통해 얻어진다.
다음으로 충격전 낙상감지를 위한 와 낙상방향 판별을 위
한 는 각각 와 를 적분하여 구하는데, 이
때 적분에 따른 표류오차(drift error)를 제거하기 위해 [9]에 소 개된 방법으로 선택적 적분(conditional integration)이 적용되었 다. 수직속도 가 설정된 문턱값을 넘는 경우 낙상으로 결정 이 되고 다음 절의 낙상방향 판별이 수행된다.
2.1.2 SVM을 통한 낙상방향 판별
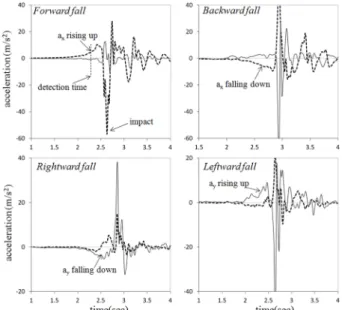
낙상으로 감지가 되면 감지 시점의 동특성 파라미터값이 낙 상방향 판별을 위한 SVM의 입력값이 된다. 본 연구에서 고려 되는 파라미터는 앞 절에서 설명된 속도 vx(= )와 vy(= ), 기 울기 roll과 pitch, 가속도 ax(= )와 ay(= ) 이다. 이 중 vx, pitch, ax는 전후방 낙상과 연관되어 모두 전방시 +값을 가지며, vy, roll, ay는 좌우측 낙상과 연관되어 vy, ay는 좌측시 roll은 우측시 +값 을 갖는다 (Fig. 1참조). 각 방향 낙상시 관련 가속도가 + 또는
sZ
sZ
sZ
y⁄sZz
sZ
x⁄ s 2Zy+s 2Zz
– sZ=[sZx, ,sZy sZz]T
sa
x say
sa=[sax, ,say saz]T sg
sZ sg sg=g×sZ g×sZ sa
Iv
z Ia
z Ia
z Iaz=s Ta Zs
Iv
z sv=[svx, ,svy svz]T Iaz sa
Iv
z
sv
x svy
sa
x say
Fig. 1. Illustration of directional accelerations and velocities: forward fall case.
Fig. 2. x- and y- accelerations for each fall direction (ax: black dashed, ay: gray solid).
−의 값으로 변화되는것이 Fig. 2에서 보여진다.
SVM은 전후방 (F vs. B)과 좌우측 (R vs. L)을 별도로 분류 하기 위한 이진 분류(binary classification)와 전후좌우를 동시에 분류하기 위한 다중 분류(multi-class classification)로 나누어 수 행되었다.
SVM은 지도 학습(scripted learning)에서 사용되는 방법으로, 주어진 자료에 대해서 그 자료들을 분리하는 초평면(hyperplane) 중에서, 자료들과 가장 거리가 먼, 즉 최대 마진(margin) 초평면 을 찾는 방법이다[14,15]. 본 연구에서는 초평면을 찾는 방법으 로 SMO(Sequential Minimal Optimization)이 적용되었고, SMO 연습과정을 검증하기 위하여 KKT(Karush-Kuhn-Tucker) 조건 이 적용되었다.
비선형 훈련데이터(training data)에 대해서는 커널함수(Kernel function)를 이용하여 훈련데이터를 고차원의 특징공간에 매핑시 킨다. 커널함수는 선형(linear), 이차항(quadratic), 다항(polynomial), 가우시안 RBF(Gaussian Radial Basis Function) 등의 종류가 있 으며 본 연구에서는 내적(dot product)을 의미하는 선형이 적용 되었다.
SVM은 기본적으로 이진분류를 위해 고안되었으나 이를 확장 하여 세 개 이상의 클래스를 분류하는 다중 분류로도 사용되고 있다. 이는 기본적으로 여러개의 이진분류 SVM을 구성하고 이 진분류결과들을 조합하여 다중분류 결과를 도출하는 방식으로, 대표적인 방법으로 one-against-all, one-against-one, 그리고 directed acyclic graph 방식 등이 있다[16].
이 중 본 연구를 위하여 one-against-all방식의 multi-class SVM 이 활용되었다. 낙상방향 판별법의 전체 순서도는 Fig. 3에서 보 여진다.
2.2 낙상 시험
낙상시험은 총 11명의 남성 피시험자를 대상으로 하였으며 피 시험자 정보는 다음과 같다: 평균연령 24±1세; 평균 신장 173.5±7.1 cm; 평균체중 67.8±9.8 kg. 피시험자는 모두 전정기 관 및 근골격 기능에 이상이 없었으며, 이전에 본 연구와 유사 한 실험에 참가한 경험이 없었다. 실험전(실험결과에 영향을 끼 칠 수 있는) 실험목적을 제외하고, 실험절차에 대해 충분한 설 명을 들었다. 안전을 위하여 넓은 공간의 가운데 지면에 매트리 스를 설치한 후 시험되었다.
데이터 수집을 위하여 네덜란드 Xsens Technology사 (www.
xsens.com)의 MTw 무선 관성센서가 사용되었다. MTw 센서모듈 은 3축 가속도계 (측정구간 ±160 m/s2, 잡음수준 0.003 ) 와 3축 자이로스코프 (측정구간 ±1200 deg/s, 잡음수준 0.05 )를 포함하고 있다. 센서는 배꼽아래 부근 정중앙허 리와 유두높이의 정중앙가슴에 벨크로밴드를 이용하여 부착되 었으며 100 Hz 주기로 샘플링되었다.
낙상시험은 4가지 방향(전방, 후방, 좌측면, 우측면)에 대하여 각 방향으로 3가지로 구성되어 총 12가지 유형의 낙상이 실시 되었다. 각 낙상방향의 1번과 2번은 [17]을, 3번은 [18]을 참조 하여 시험유형이 설정되었다. 모든 테스트는 두번씩 계측이 되 어 총 264개의 데이터가 해석에 사용되었다 (Table 1 참조).
2.3 데이터 분석
낙상방향 판별에 앞서 낙상감지를 위한 수직속도는 허리의 경 우 −2.51±0.41 m/s (max -1.68, min -3.55), 가슴의 경우 -2.92±0.49 m/s (max -1.63, min -4.09)로 3σ 기준에서 outlier는 없었으며, 각 낙상유형별로도 outlier는 존재하지 않았다. 따라서, 허리와 가슴 모두 수직속도 문턱값 (threshold)을 -1.6 m/s로 설정하면 m s⁄ 2⁄ Hz
deg s⁄ ⁄ Hz Fig. 3. Flowchart of the fall detection and fall direction determi-
nation.
Table 1. Protocol of the simulated falls
Code Fall Direction Description F1 Forward No step without knee flexion
F2 No step with knee flexion
F3 Sit-to-stand, short step, and trip B1 Backward No step without knee flexion
B2 No step with knee flexion
B3 One leg swing to front
R1 Rightward No step without knee flexion
R2 No step with knee flexion
R3 Start falling back and turn to side L1 Leftward No step without knee flexion
L2 No step with knee flexion
L3 Start falling back and turn to side
100% 정확하게 낙상으로 감지되었다. 따라서, 본 논문의 주제 인 낙상방향 인식을 위한 SVM입력 파라미터들은 허리와 가슴 모두 수직속도 −1.6 m/s인 순간 추출되었다. 낙상 유형별 수직 속도는 Fig. 4에 보여진다.
SVM의 분류 성능은 훈련데이터와 테스트데이터의 선정에 따 라 달라질 수 있다. 데이터 선정에 따른 판별결과에의 영향성을 최소화하기 위하여 이분할 교차검증(two-fold cross validation) 이 적용되었다. 따라서, 우선 임의의 선정된 5명의 데이터가 훈 련데이터로, 나머지 6명의 데이터가 테스트데이터로 사용되어 SVM이 적용되었다. 다음으로 훈련데이터와 테스트데이터가 맞 바꾸어져 다시 SVM을 적용하였으며 최종적으로 판별정확도상 sensitivity(예: 전방낙상을 전방낙상으로 판별하는 비율)는 두 경 우의 평균으로 산출되었다.
낙상방향 판별은 전후방분류와 좌우측분류를 위한 이진분류 와 전후좌우 네방향분류를 위한 다중분류로 나누어졌다. 각 분 류에 대하여 속도, 기울기, 가속도가 조합되어 총 7 경우에 센 서부착위치에 따른 조합 2경우로 총 14경우가 수행되었다.
3. 결 과
3.1 이진 분류 결과
Table 2와 Table 3은 각각 전방대 후방과 우측 대 좌측에 대 한 이진 분류 결과이다.
Table 2를 보면 vx, pitch, ax의 순으로 판별정확도가 우수하다.
상대적으로 판별력이 떨어지는 pitch와 ax를 조합한 pitch & ax
는 pitch와 ax 별개를 이용한 경우보다 향상된 결과가 도출되지
않은 반면 판별력이 뛰어난 vx가 포함된 거의 모든 조합에서 100%의 sensitivity가 얻어졌다. 따라서, 입력 파라미터간 상호 보완적 관계는 관찰되지 않았으며, 이는 가장 우수한 파라미터 를 단독으로 사용하는 것이 여러 파라미터를 조합하는 경우보 다 나음을 의미한다. 한편, 센서의 부착위치에 따른 비교에 있 어 (즉 허리 vs. 가슴) 유의미한 차이는 없었다.
Table 3의 결과도 Table 2의 결과와 비슷한 경향을 보였다. vy, roll, ay의 순으로 판별정확도가 우수했으며 vy가 포함된 거의 모 든 조합에서 100%의 sensitivity가 얻어졌다. 또한, 센서부착위 치에 따른 영향성은 좌우측 분류에서도 뚜렷히 없었다.
전후방 및 좌우측 분류 모두 (가슴부착센서의 전후방분류를 제외하면) 속도라는 단일 파라미터 (즉, 전후방에서 vx와 좌우측 에서 vy)를 이용하여 100%의 sensitivity를 얻을 수 있었으므로, 이진분류의 경우 SVM이 아닌 보다 간단한 문턱값(threshold)방 식도 충분히 가능함을 알 수 있었다.
3.2 다중 분류 결과
Table 4와 Table 5는 각각 허리부착센서와 가슴부착센서를 이 용하여 전후좌우방향으로 다중분류를 하였을 때의 sensitivity결 과이다.
파라미터별로 보면 Table 2와 Table 3의 이진분류와 마찬가 Fig. 4. Boxplots of the vertical velocities for the waist- and chest
attached sensors.
Table 2. Sensitivities (%) of binary classification for forward vs.
backward falls
Input Parameter Waist Chest
F B F B
vx 100.0 100.0 100.0 93.9
pitch 83.4 87.9 87.9 83.4
ax 81.8 80.3 90.9 94.0
vx & pitch 100.0 100.0 100.0 100.0
vx & ax 100.0 100.0 100.0 95.5
pitch & ax 83.3 83.3 90.9 90.9
vx & pitch & ax 100.0 100.0 98.5 100.0 Table 3. Sensitivities (%) of binary classification for rightward vs.
leftward falls
Input Parameter Waist Chest
F B F B
vy 100.0 100.0 100.0 100.0
roll 96.9 90.9 98.5 86.8
ay 89.4 84.8 90.9 80.3
vy & roll 100.0 100.0 100.0 100.0
vy & ay 100.0 100.0 100.0 100.0
roll & ay 98.5 87.9 97.0 86.4
vy & roll & ay 100.0 100.0 100.0 96.9
지로 속도, 기울기각, 가속도 순으로 sensitivity가 높았다. F, B, R, L의 네 경우 sensitivity를 평균한 결과를 기준으로 정확도 순 서를 정해보면: Table 4의 허리부착 센서의 경우 vel, vel & tilt, vel & accel, vel & tilt & accel 순으로 상위권을 형성했으며, Table 5의 가슴부착 센서의 경우 vel, vel & tilt & accel, vel & tilt, vel
& accel 순이었다. 이를 통해 속도파라미터의 중요성을 다시한 번 확인할 수 있었다.
Table 4. Sensitivities (%) of multi-class classification based on the waist-attached sensor
Input Parameter F B R L Ave.
vel (= vx & vy) 93.8 91.3 62.3 63.6 77.8 tilt (= pitch & roll) 77.0 74.2 43.2 56.2 62.7 accel (= ax & ay) 68.3 66.3 39.0 42.7 54.1 vel & tilt 88.3 90.0 65.4 65.4 77.3 vel & accel 92.0 87.0 61.8 64.2 76.3 tilt & accel 77.0 71.7 33.9 56.2 59.7 vel & tilt & accel 92.0 86.4 58.7 64.2 75.3 Table 5. Sensitivities (%) of multi-class classification based on the
chest-attached sensor
Input Parameter F B R L Ave.
vel (= vx & vy) 87.7 83.5 52.5 66.0 72.4 tilt (= pitch & roll) 80.8 79.5 36.4 48.2 61.2 accel (= ax & ay) 83.2 83.3 35.7 43.7 61.5 vel & tilt 87.1 84.6 53.8 62.3 72.0 vel & accel 87.7 79.1 46.3 66.0 69.8 tilt & accel 80.8 87.0 29.5 37.1 58.6 vel & tilt & accel 85.8 84.6 56.3 62.9 72.4
Fig. 5. Distribution of the velocities (νx and νy) for each fall direction.
Table 6. Confusion matrix showing the actual and determined fall directions (%) based on the waist-attached sensor
vel Determined
F B R L
Actual
F 94.4 0.0 0.0 5.6
B 0.0 88.9 0.0 11.1
R 5.6 33.3 61.1 0.0
L 2.8 37.3 0.0 63.9
tilt Determined
F B R L
Actual
F 69.4 8.3 2.8 19.4
B 2.8 83.3 0.0 13.9
R 19.4 36.1 38.9 5.6
L 0.0 44.4 0.0 55.6
accel Determined
F B R L
Actual
F 58.3 11.1 11.1 19.4
B 8.3 77.8 5.6 8.3
R 11.1 25.0 41.7 22.2
L 8.3 36.1 5.6 50.0
vel & tilt Determined
F B R L
Actual
F 94.4 0.0 0.0 5.6
B 0.0 86.1 2.8 11.1
R 2.8 33.3 63.9 0
L 2.8 33.3 0.0 63.9
vel & accel Determined
F B R L
Actual
F 94.4 0.0 0.0 5.6
B 0.0 83.3 0.0 16.7
R 2.8 33.3 63.9 0.0
L 5.6 33.3 0.0 61.1
tilt & accel Determined
F B R L
Actual
F 69.4 8.3 5.6 16.7
B 5.6 77.8 2.8 13.9
R 22.2 33.3 30.5 13.9
L 2.8 41.7 0.0 55.6
vel & tilt & accel Determined
F B R L
Actual
F 94.4 0.0 0.0 5.6
B 0.0 86.1 0.0 13.9
R 2.8 36.1 61.1 0.0
L 5.6 33.3 0.0 61.1
한편, 센서부착위치에 따른 영향성을 보면 (즉, Table 4 vs.
Table 5), accel을 단독으로 사용한 경우만을 제외하면 모두 허 리부착 센서가 우수한 성능을 보였다.
모든 경우에서 F, B에 대한 판별이 R, L에 대한 판별보다 정 확성이 높았다 (예를 들어, Table 4 중 vel의 경우 F 93.8%, B 91.3%로 R 62.3%와 L 63.6%보다 우수). 이는 전후방 낙상시험 의 경우 낙상 움직임이 대체로 시상면(sagittal plane)에서 크게 벗 어나지 않게 이루어 졌으나, 좌우측 낙상의 경우 낙상개시는 관 상면(coronal plane)에서 이루어 졌어도 낙상감지시점에서는 (즉, 수직하강속도가 문턱값 -1.6 m/s에 도달했을때) 관상면에서 벗 어나 시상면방향으로의 움직임이 많이 있기 때문이다. Fig. 2를 보면 우측낙상의 겨우 ay뿐 아니라 ax도 많은 변화가 있음이 보 여진다. 결과적으로 Fig. 5의 속도분포를 보면 좌우측 낙상시의 속도가 위·아래 (즉 전·후방향)로 넓게 퍼져 있다. 특히 Table 1의 R3과 L3유형을 보면 뒤로 넘어지기 시작해서 낙상중 우측 또는 좌측으로 넘어지는 시험이어서 Fig. 5를 보면 낙상의 속도 가 음의vx를 많이 가졌으며 이로 인해 후방 낙상의 경우와 혼재 되었다. 결과적으로 Table 6의 vel 파라미터 결과를 보면 R과 L 의 분류에 있어 FP 중 B가 각각 33%와 37.3%로 대다수를 형 성하였음을 볼 수 있다. 여기서 FP는 false positive로 예를 들어 후방낙상을 후방이 아닌 다른 방향으로 판별하는 경우이다.
다중분류의 경우 보다 자세한 결과는 Table 6의 각 파라미터 별 오분류 행렬(confusion matrix)에 보여진다. Table 6은 최초 5명의 데이터를 SVM 훈련데이터로, 나머지 6명의 데이터를 SVM 테스트데이터로 설정한 경우의 결과이다. 참고로 Table 6 의 각 경우에서 대각성분(diagonal component)이 sensitivity를 의미하는데 이 sensitivity는 교차검증을 위한 평균값이 아니므 로 Table 4에 있는 평균값과는 다소 다르다.
Table 6의 오분류 행렬에서 속도가 포함된 파라미터에 의한 결과와 그 외의 결과 (즉, tilt, accel, tilt & accel)에서 판별의 정 확성외에 중요한 차이점이 있다. 속도파라미터가 포함된 조합의 경우 FP는 존재하지만 이진분류 (즉, F vs. B 또는 R vs. L)관 점에서는 여전히 100%의 sensitivity가 유지되고 있다. 예를 들 어 첫번째인 속도 파라미터의 경우 F(전방)에 대한 잘못된 판단 (FP)으로 B (후방)은 없으며 B에 대한 FP 중 F는 없다. 마찬가 지로 R과 L에 대한 FP로 각각 L과 R은 없다. 반면 vel파라미 터가 포함되지 않은 분류에서는 이진분류관점에서도 100%의 sensitivity 가 유지되지 않는 문제가 관찰된다.
4. 고찰 및 결론
본 논문에서는 이진분류와 다중분류에 대하여, 두가지 센서부 착위치와 세가지 동특성 파라미터가 낙상방향 판별력에 미치는 영향이 아래와 같이 관찰되었다.
1. 낙상방향을 감지하기 위한 SVM입력파라미터로써 이진분
류 (즉, F vs. B 또는 R vs. L)와 다중분류(F, B, R, L 분류)에 상 관없이 속도, 기울기, 가속도의 순으로 우수하였다.
2. 이진분류시 속도성분을 이용하여 100%의 sensitivity가 얻 어졌다. 파라미터간 상호보완성이 적어 다수개의 파라미터를 조 합함에 따른 판별력 향상은 없었다. 따라서, 속도성분 한가지를 이용한 판별이 해석의 간편성은 물론 정확성에서도 가장 우수하였다.
3. 다중분류시 허리부착 센서가 가슴부착 센서에 비해 다소 우수한 판별력을 보였다. F와 B가 R과 L에 비해 높은 sensitivity 를 보였으며 허리부착 센서의 속도만을 이용한 판별이 F 93.8%, B 91.3%, R 62.3%, L 63.6%로 비교대상 중 가장 높은 판별력 을 보였다.
다중분류에서 F와 B에 비해 R과 L 분류의 sensitivity 저하는 SVM분류기법의 문제라기 보다는 측면낙상 시험 자체가 적지않 은 정도의 전후방 움직임을 동반하였기 때문으로 판단된다. 이 는 시험중 피시험자들은 시험프로토콜을 준수하는 범위내에서 는 자연스럽게 낙상을 연기하였기 때문이다. Bagala 등 [3]에 따 르면 낙상방향은 backward (56%), forward (25%), sideward (19%) 순으로 전후방이 합계 81%로 좌우측방 19%보다 훨씬 빈번하 였다. 하지만, 측방 낙상이 골반 및 대퇴골 골절 등을 일으킬 확 률이 많아 가장 치명적이라는 연구도 발표된 바 있다[10]. 따라 서, 측면낙상 판별에 대한 보다 많은 연구가 필요하다고 생각한다.
본 연구를 통하여 관성센서 신호와 support vector machine 기법을 이용하여 충격전 낙상방향 판별방법을 제시하였다. 저자 가 아는 한에서는 SVM을 낙상방향 판별에 적용한 점과 충격전 낙상방향 판별을 시도한 점 모두 최초로 제안되는 것이다. 제시 된 방법은 충격전 낙상탐지 기법과 연동되어 낙상자가 지면에 부딪치기 전에 낙상방향을 판별한다는 특징을 가지므로 인플레 이터블 에어백 등 충격완화시스템에 중요하게 사용될 수 있다.
REFERENCES
[1] M. E. Tinetti, C. F. Mendes De Leon, J. T. Doucette, and D.
I. Baker, “Fear of falling and fall-related efficacy in rela- tionship to functioning among community-living elders”, J.
Gerontol., Vol. 49, No. 3, pp. M140-M147, 1994.
[2] T. Shany, S. J. Redmond, M. R. Narayanan, N. H. Lovell,
“Sensors-based wearable systems for monitoring of human movement and falls”, IEEE Sensors J., Vol. 12, No. 3, pp.
658-670, 2012.
[3] F. Bagala, C. Becker, A. Cappello, L. Chiari, K. Aminian, J. M. Hausdorff, W. Zijlstra, and J. Klenk “Evaluation of accelerometer-based fall detection algorithms on real world falls”, PLoS One, Vol. 7, No. 5, p. e37062, 2012.
[4] G. C. Park, A. Y. Jeon, S. H. Lee, J. M. Son, M. C. Kim, and G. R. Jeon, “Implementation of a falls recognition system using acceleration and angular velocity signals”, J. Sensor Sci. & Tech., Vol. 22, No. 1, pp. 54-64, 2013.
[5] S. H. Liu and W. C. Cheng, “Fall detection with the support vector machine during scripted and continuous unscripted
activities”, Sensors, Vol. 12, pp. 12301-12316, 2012.
[6] G. Shi, C. S. Chan, W. J. Li, K. S. Leung, Y. Zou, and Y. Jin,
“Mobile human airbag system for fall protection using MEMS sensors and embedded SVM classifier”, IEEE Sen- sors J., Vol. 9, No. 5, pp. 495-503, 2009.
[7] T. Tamura, T. Yoshimura, M. Sekine, M. Uchida, and O.
Tanaka, “A wearable airbag to prevent fall injuries”, IEEE Trans. Inf Technol Biomed, Vol. 13, No. 6, pp. 910-914, 2009.
[8] G. Wu and S. Xue, “Portable preimpact fall detector with inertial sensors”, IEEE Trans. Neural Syst. Rehab. Eng., Vol. 16, No. 2, pp. 178-183, 2008.
[9] J. K. Lee, “Study on vertical velocity-based pre-impact fall detection”, J. Sensor Sci. & Tech., Vol. 23, No. 4, pp. 251- 258, 2014.
[10] M. Tolkiehn, L. Atallah, B. Lo, Y. Guang-Zhong, “Direc- tion sensitive fall detection using a triaxial accelerometer and a barometric pressure sensor", IEEE EMBC, pp. 369- 372. 2011.
[11] A. Y. Jeon, J. Y. Yoo, G. C. Park, and G. R. Jeon, “Imple- mentation of falls detection system using 3-axial acceler- ometer sensor”, J. Korea Academia-Industrial Cooperation Soc., Vol. 11, No. 5, pp. 1564-1572, 2010.
[12] Y. J. Lee, P. J. Lee, H. K. Yang, C. H. Kim, and J. W. Lee,
“Research for effective accelerometer signal processing to detect the falling activity”, in Summer Annual Conf. of the
Korean Institute of Electrical Engineers, pp. 1794-1795, 2011.
[13] J. K. Lee, E. J. Park, and S. N. Robinovitch, “Estimation of attitude and external acceleration using inertial sensor mea- surement during various dynamic conditions”, IEEE Trans.
Instrum. Meas., Vol. 61, No. 8, pp. 2262-2273, 2012.
[14] V. N. Vapnik, “An overview of statistical learning theory”, IEEE Trans. Neural Networks, Vol. 10, No. 5, pp. 988-999, 1999.
[15] N. Cristianini and J. Shawe-Taylor, An Introduction to Sup- port Vector Machines and Other Kernel-based Learning Methods, Cambridge University Press, Cambridge, 2000.
[16] C. W. Hsu and C. J. Lin, “A comparison of methods for multiclass support vector machines”, IEEE Trans. Neural Networks, Vol. 13, No. 2, pp. 415-425, 2002.
[17] A. K. Bourke, P. van de Ven, M. Gamble, R. O'Connor, K.
Murphy, E. Bogan, E. McQuade, P. Finucane, G. Olaighin, and J. Nelson, “Evaluation of waist-mounted tri-axial accel- erometer based fall-detection algorithms during scripted and continuous unscripted activities”, J. Biomech., Vol. 43, pp.
3051-3057, 2010.
[18] M. Kangas, A. Konttila, P. Lindgren, I. Winblad, and T.
Jamsa, “Comparison of low-complexity fall detection algo- rithms for body attached accelerometers”, Gait & Posture, Vol. 28, pp. 285-291, 2008.