http://dx.doi.org/10.5369/JSST.2018.27.2.86 pISSN 1225-5475/eISSN 2093-7563
Paddling Posture Correction System Using IMU Sensors
Kyungjin Kim and Chan Won Park
+Abstract
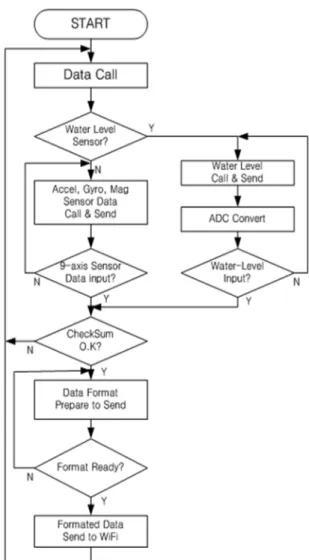
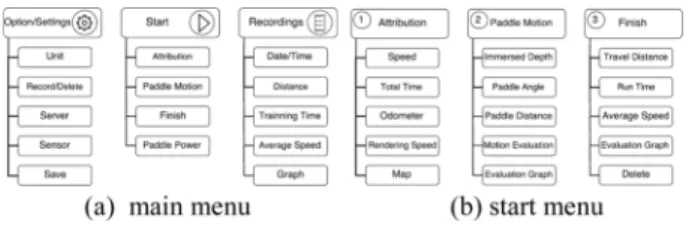
In recent times, motion capture technology using inertial measurement unit (IMU) sensors has been actively used in sports. In this study, we developed a canoe paddle, installed with an IMU and a water level sensor, as a system tool for training and calibration pur- poses in water sports. The hardware was fabricated to control an attitude heading reference system (AHRS) module, a water level sensor, a communication module, and a wireless charging circuit. We also developed an application program for the mobile device that pro- cesses paddling motion data from the paddling operation and also visualizes it. An AHRS module with acceleration, gyro, and geo- magnetic sensors each having three axes, and a resistive water level sensor that senses the immersion depth in the water of the paddle represented the paddle motion. The motion data transmitted from the paddle device is internally decoded and classified by the appli- cation program in the mobile device to perform visualization and to operate functions of the mobile training/correction system. To con- clude, we tried to provide mobile knowledge service through paddle sport data using this technique. The developed system works reasonably well to be used as a basic training and posture correction tool for paddle sports; the transmission delay time of the sensor system is measured within 90 ms, and it shows that there is no complication in its practical usage.
Keywords: IMU sensor, AHRS, Posture correction system, Paddle Sports, Mobile knowledge service.
1. INTRODUCTION
With the development of semiconductor manufacturing technology and microfabrication technology based on this, the technology and application fields of inertial measurement unit (IMU) sensors using microelectromechanical systems (MEMS) sensor elements are expanding widely [1-3]. Therefore, the scientific analysis of sports training using motion sensing technology has been attempted to acquire and analyze sensor signals by attaching specific sensors to various parts of sports equipment [4,5].
In recent years, high-speed IMU sensors have been developed and employed in robot and drone technologies. Remote control devices for three-dimensional (3D) games using these sensors have been popularized and the introduction of technologies for transmitting swing motion for baseball and golf suggests that the
era of sports science is fast approaching [6-9]. In addition, Microsoft's Kinect technology [10] and Leap motion technology [11], which have similar principles, are the leading technologies in the realization of motion capture.
Although various motion sensing techniques have been developed, in the case of paddling movement in water sports such as boats, canoes, and kayaks, the analysis method in the existing studio environment is difficult for use in the field on the real water surface. There is a lack of realism and a device with sensor is yet to be developed which can be placed directly on the water to detect motion in real time as well as the depth of in-water [12,13].
The paddling operation must be performed at the appropriate motion and timing with respect to the intake angle, the depth of entry of the paddle, and the watering operations to the surface of the paddle so that the hull can move effectively. However, only a certain degree of approximate measurement of the simple paddling operation is required to acquire the basic operation pattern reference without requiring high speed and accurate positional measurement such as motion detection of golf or baseball [7-9].
In this study, we have developed a device that can transmit the paddling operation of the user wirelessly by attaching a sensor, signal processing circuit, communication circuit, power circuit, etc. to the paddle. In addition, the obtained paddling motion state is compared with the motion patterns of existing athletes so that Dept. of Electrical and Electronics Engineering, Kangwon National University,
1 Kangwondaehak-gil, Chuncheon-si, Gangwon-do 24341, Korea
+