Copyright
Ⓒ2015 KSAE / 135-12 pISSN 1225-6382 / eISSN 2234-0149
DOI http://dx.doi.org/10.7467/KSAE.2015.23.2.239Transactions of KSAE, Vol. 23, No. 2, pp.239-245 (2015)
하이브리드 농업용 트랙터의 제어 전략 개발을 위한 작업 부하 분석
김 진 성․박 영 일*
서울과학기술대학교 기계시스템디자인공학과
Analysis of Work Load for Developing the Control Strategy of Hybrid Agricultural Tractor
Jinseong Kim․Yeongil Park*
Department of Mechanical System Design Engineering, Seoul National University of Science and Technology, Seoul 139-743, Korea
(Received 4 December 2014 / Revised 26 December 2014 / Accepted 13 January 2015)
Abstract : In order to control the hybrid power system efficiently, the knowledge for the required load of the system is important. The agricultural tractor performs various farm works such as plow, rotary, and baler. When it performs rotary tillage and baler operation, the generated work load is analyzed. To analyze trend of work load, moving average technique is applied to the measurement data. Optimal control inputs for the two works are obtained from simulation using the dynamic programming. The novel fundamental control strategy for parallel hybrid tractor called Max. SOC is proposed.
Key words : Hybrid agricultural tractor(하이브리드 농업용 트랙터), Control strategy(제어 전략), Work load(작업 부하), Power-take-off(동력 인출 장치), Dynamic programming(동적 계획법), Rotary work(로터리 작업), Baler work(베일러 작업)
1. 서 론1)
최근 국제 유가의 상승과 배기가스 규제가 강화 됨에 따라 농업기계에 대한 친환경/고효율 기술 개 발이 시급하며 특히 농업기계 중 큰 비중을 차지하 는 트랙터에도 친환경 기술로서 하이브리드 기술의 적용이 시도되고 있다. 하이브리드 트랙터는 모터 의 전기에너지를 동력원으로 추가하여 트랙터 작업 에 따라 엔진과 모터의 동력을 효율적으로 이용하 므로 고효율의 에너지 사용이 가능하고 배기가스의 감소를 통해 환경규제에 대응이 가능하다.
트랙터의 하이브리드 기술은 일본, 미국 등 선진 트랙터 업체에서는 전기자동차 또는 하이브리드 자 동차와 같은 미래형 자동차의 기술 개발을 농업용
*
Corresponding author, E-mail: [email protected]
차량으로 적극 개발 추진하고 있다. Kubota, Yanmar, CASE IH, Schmetz 등 선진 트랙터 회사를 중심으로 하이브리드 트랙터 개발이 시작되고 있으며 John- Deere의 경우에는 하이브리드 기술을 일부 적용한 모델을 양산 중이다. 국내에서는 LS엠트론이 PHEV 트랙터를 개발하고 있고 병렬형 하이브리드 트랙터 개발은 시작하고 있는 실정이다.
트랙터는 트랙터 구동, 견인력 또는 인출 동력원 을 모두 엔진을 동력원으로 이용하며 작업의 요구 에 따라 각종 작업기를 부착하여 농작업을 수행할 수 있도록 고안된 기계이다.
하이브리드 트랙터의 경우에는 하이브리드 시스 템 구성과 최적 제어 적용을 통해 연료 절약이 가능 하므로 유가상승에 따른 농가의 경제적 부담을 감 소시켜주며 트랙터의 작업 효율을 높여 농민의 작
김진성․박영일
업환경을 개선시킬 수 있다.
트랙터는 일반 자동차와 달리 차량의 진행 뿐 아 니라 동시에 다양한 작업을 수행하게 된다. 하이브 리드 자동차를 위해 제안된 제어 전략들을 그대로 하이브리드 트랙터에 적용할 수 없는 실정이다.
트랙터의 작업 시 요구되는 부하에 대해 다양한 연구가 진행되어 왔다.1,2) 하지만 대부분 트랙터의 성능 검증 및 용량 설계를 위한 분석만 이루어졌으 며 하이브리드 트랙터의 제어 전략을 개발하기 위 한 분석은 미비하다.
본 논문에서는 하이브리드 트랙터에 적용할 수 있는 제어 전략을 개발하기 위해 트랙터의 로터리 작업 및 베일러 작업 시 작용되는 작업 부하에 대 한 분석을 수행한다. 부하 부석을 이용하여 병렬형 하이브리드 트랙터의 기본적인 제어 전략을 개발 한다.
2. 대상 트랙터와 작업 부하
트랙터의 경우 상대적으로 부하 변동의 폭이 크 기 때문에 작업 시 작용하는 부하의 크기를 기준으 로 제어전략을 세우기에 어려움이 있다.
적용 대상 트랙터를 소개하고 트랙터 작업 부하 에 대한 분석을 수행하고자 한다.
2.1 병렬형 하이브리드 트랙터
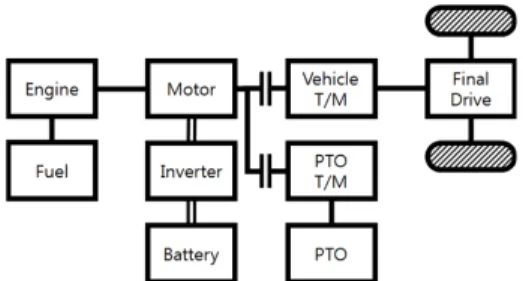
일반적으로 트랙터는 엔진과 같은 동력원을 이용 해 차량의 주행과 함께 농작업을 동시에 수행하게 된다. 이를 위해 트랙터에는 주행을 위한 출력축 이 외에 PTO(Power take off)라는 농작업을 위한 출력 축이 하나 더 존재한다. 이 출력축은 농작업을 수행 할 때 적당한 작업기를 부착하여 사용한다.
병렬형 하이브리드 트랙터는 엔진 이외에 모터와 배터리를 추가하여 동력을 제공한다. Fig. 1은 하이 브리드 트랙터의 기본 구조이다.
적용된 병렬형 하이브리드 트랙터는 엔진의 용량 에 비해 모터와 배터리의 용량이 작으며 모터의 축 이 엔진의 축과 분리될 수 없는 구조로서 모터만을 이용하여 구동할 수 없다. 또한 트랙터는 특성상 작 업부하의 크기가 주행에서의 요구 동력보다 매우 크기 때문에 차량의 감속 또는 제동 시 회생 제동을
Fig. 1 Power train of parallel hybrid tractor
Table 1 Specification of target tractor
무게 2570 [kg]
전단면적 3.2 [m2]
타이어의 반경 0.64 [m]
공기 저항 계수 0.45
구름 저항 계수 0.02
변속기의 효율 85 %
엔진 용량 55 [kW]
모터 용량 7 [kW]
배터리 용량 15 [kW], 9.7 [Ah]
하기는 어려움이 있어 엔진 구동 모드, 모터 어시스 트(하이브리드) 모드, 충전 모드 등 3가지 모드만을 사용하게 된다.
대상 트랙터의 제원은 Table 1과 같다.
2.2 작업 부하
트랙터는 일반적으로 농지에서 쟁기(Plow), 로터 리(Rotary), 베일러(Baler) 작업 등을 수행한다. 쟁기 작업은 작업에 PTO를 사용하지 않으며 트랙터의 견인력을 이용하여 작업을 수행한다. 반면에 로터 리와 베일러 작업은 PTO 출력축에 작업기를 장착 하여 주로 PTO를 통해 동력이 소요된다. 본 논문에 서는 PTO를 사용하는 로터리와 베일러 작업에 대 해 분석하였다.
2.2.1 로터리 작업
로터리 작업은 트랙터의 PTO를 통해 전달되는 동력을 통해 로터리 날을 회전시켜 밭을 갈아엎는 작업이다. 밭의 상태, 로터리 작업기의 크기, 로터리 날의 상태, 유압 장치의 압력, 변속기의 설정 상태 등 요구 부하에 관여하는 상당히 많은 요인이 있다.
특히, 밭의 상태와 같이 언제든 변할 수 있는 외적인 요인이 있어 작업부하를 예측하기 어렵다. 로터리
하이브리드 농업용 트랙터의 제어 전략 개발을 위한 작업 부하 분석
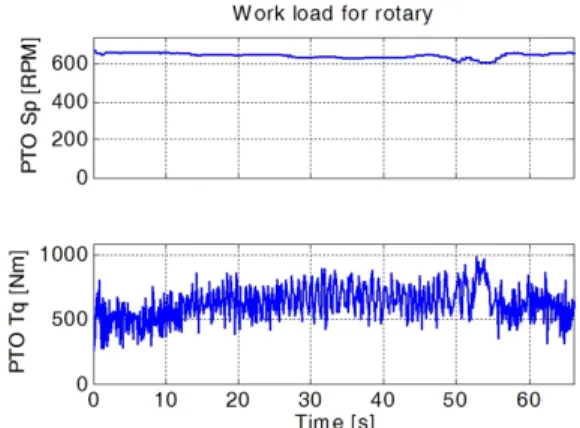
Fig. 2 Work load for rotary
작업의 부하에 대한 분석을 위해, M사로부터 실험 을 통해 얻은 부하 계측 데이터를 제공받았고 Fig. 2 는 해당 데이터이다.
PTO의 작업토크가 예측하기 어려운 형태로 매우 불규칙하게 요동치고 있는 것을 확인할 수 있다. 그 이유는 로터리 작업의 특성을 통해 이해할 수 있다.
로터리 날이 굳은 토양을 쇄토하기 위해 충돌하게 되고 충돌로 인해 발생된 과도 상태가 안정되기 이 전에 반복적으로 다음 로터리 날이 충돌을 하게 된 다. 또한 토양의 특성이 일정하지 않으므로 PTO의 작업토크가 불규칙하게 나타나는 것이다. 또한 안 정되지 않는 과도상태가 반복적으로 일어남으로서 PTO에 요구되는 토크를 예측하는 것은 매우 어렵다.
2.2.2 베일러 작업
베일러 작업은 트랙터의 PTO를 통해 전달되는 동력을 이용하여 농지에 건초를 처리, 운반, 저장하 기 위해 압축하여 묶어주는 작업이다.
이 작업은 실측 데이터를 입수하기 어려워 문헌 을 통해 베일러 작업에 대한 부하 계측 결과를 얻었 다.3) 문헌에는 시간에 따른 소요 동력으로 나타나 있으나, 계측 시 목표로 잡았던 PTO의 회전 속도인 585[rpm]으로 설정하여 속도와 토크를 얻어 내었다.
Fig. 3은 베일러 작업에 대한 PTO의 속도와 토크 를 나타낸 것이다.
베일러 작업도 건초의 종류나 상태, 변속기의 설정 등 다양한 환경의 영향을 받을 것이다. 하지만 Fig. 3 에 나타난 것과 같이 특정한 패턴을 가지며 이는 추 후 제어 전략을 개발하는 과정에서 장점이 될 수 있다.
Fig. 3 Workload for baler work
3. 부하 분석 및 제어 전략
하이브리드 동력 시스템의 효율적인 제어 전략을 세우기 위해서는 부하를 예측할 수 있어야 한다. 하 지만 앞서 기술한 것과 같이, 로터리 작업의 부하는 예측하기 매우 어렵다. 이동 평균 기법을 이용하여 계측된 로터리 부하 데이터에서 과도상태를 제거하 여 분석하였다. 분석된 부하 데이터를 이용하여 하 이브리드 제어 전략을 제안한다.
3.1 부하 분석
베일러 작업 부하는 특정한 패턴을 가지므로 별 도의 분석이 요구되지 않는다. 이에 본 논문에서는 이동 평균 기법과 선형 회귀 기법을 통해 로터리 작 업 부하에 대해 분석하였다.
3.1.1 이동 평균 기법
이동 평균 기법은 일반적으로 계측 신호의 노이 즈를 제거하거나 불규칙한 신호의 추세를 알아보기 위해 사용된다. 이동 평균 기법에는 단순 이동 평균, 가중 이동 평균, 지수 가중 이동 평균 등 다양한 종 류가 있으며 추세 변화에 대한 감도가 좋은 지수 가 중 이동 평균을 사용한다.
지수 가중 이동 평균은 오래된 값일수록 기하급 수적으로 가중치를 낮게 주어 이동 평균을 구한다.
지수 가중 평균의 재귀 식은 식 (1)과 같이 표현될 수 있다.4)
(1)여기서,
는
번째
이고
는 초기
부터
번째Jinseong Kim․Yeongil Park
까지의 평균을 나타낸다. 또한
는 가중치이며
이다. 본 논문에서 적용된
의 값은 0.9이다.3.1.2 이동 평균 기법의 적용
이동 평균 기법을 적용하면 일반적으로 데이터에 시간 지연이 발생하게 된다.
PTO의 토크에만 이동 평균을 적용하면 PTO의 속 도와 서로 동기화된 분석이 이루어질 수 없으므로 PTO의 속도에도 이동 평균 기법을 적용하였다.
Fig. 4는 2.2.1절에서 Fig. 2로 소개된 데이터에 이 동 평균 기법을 적용한 것이다.
Fig. 4 Work load for PTO using the moving average
3.1.3 부하의 가혹도 분석
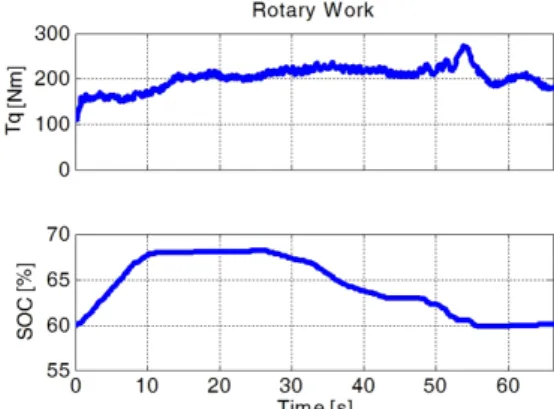
각 부하 데이터를 비교하기 위해 로터리 작업에 서 각 단수별로 PTO의 토크와 속도를 시간에 대해 수치적으로 적분하여 Fig. 5로 나타내었다.
PTO의 각 변화에 따른 작업량으로서 PTO의 회전 각이 동일함에도 기어의 설정 상태에 따라서 PTO의
Fig. 5 Severeness of work load for PTO
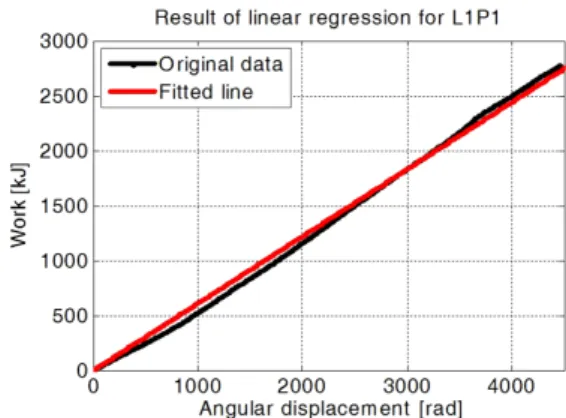
Fig. 6 Result of linear regression for L1P1
Table 2 Results of linear regression for each gear set 부 변속
단수
주 변속 단수
PTO 변속
단수 회귀식 R-square
L 1 1
0.9953L 1 2
0.9969L 2 1
0.9953L 2 2
0.9983작업량이 다름을 알 수 있다. 또한, 각 결과가 상당 히 선형적으로 나타나는 것을 확인할 수 있다. 이동 평균 기법을 통해 알아낸 로터리 부하의 추세가 큰 변화 없이 거의 일정함을 통해 알 수 있다. 각각의 데이터를 Fig. 6과 같이 선형 회귀를 통해 기울기를 계산하였다.
곡선의 기울기는 작업의 가혹도를 나타내어 추후 트랙터의 제어에서 부하의 크기 분석 대상으로 사 용될 수 있다. 각 기어 설정 상태에 대하여 선형 회 귀 결과는 Table 2와 같다. 여기서, 는 PTO의 일 량이고
는 PTO의 변위 각이다.3.1.4 기어의 설정 상태에 따른 로터리 작업 부하 이동 평균 기법을 이용하여 불규칙한 로터리 부 하 사이클의 추세를 예측할 수 있게 되었다. 하지만 토양의 상태나 기어의 설정에 따라서 부하의 형태 와 크기가 달라진다. 기어의 설정 상태 변화가 부하 의 크기에 미치는 영향을 알기 위해 앞서 구한 회귀 식의 기울기를 이용해 선형 회귀 기법을 통해 분석 하였다. 여기서, 기어 설정 상태는 트랙터의 이동 속 도와 로터리 날의 속도비로 나타낼 수 있으며 식 (2) 와 같이 표현될 수 있다.
Analysis of Work Load for Developing the Control Strategy of Hybrid Agricultural Tractor
(2)
여기서,
는 PTO의 기어 비이며
은 트랙 터의 주행 기어 비이다.Fig. 7은 4가지 기어 설정 상태에 따른 평균 부하 를 나타낸 것이다. 여기서 얻어진 회귀 식은 식 (3)과 같다.
(3)회귀 모델의 정확도를 평가하는 R- square는 0.9553이다. 여기서, 는 해당 속도비에 대한 평 균 토크이다. 이를 통해 기어 변속 시에 부하 토크의 스케일링이 가능하다.
Fig. 7 Mean torque for work speed ratio
물론, 해당 결과를 신뢰하기에는 표본의 개수가 너무 부족할 수도 있으며 추후 더 많은 실험을 통해 채워져 나아가야할 부분이다. 위 결과를 통해 PTO 속도에 비해 트랙터의 주행 속도가 빨라질수록 토 크가 증가함을 알 수 있다.
3.2 제어 전략
널리 알려진 전역 최적화 기법중 하나인 다이나 믹 프로그래밍 기법을 이용하여 연비 해석을 수행 하였다. 다이나믹 프로그래밍 기법은 원하는 결과 가 정해져 있고 이를 얻기 위해 요구되는 최적의 제어 입력 값을 찾을 때 매우 유용하다. 본 장에서 는 다이나믹 프로그래밍을 통해 얻어진 결과를 보 여주고 그에 따라 기본적인 제어 전략을 제안하고 자 한다.
3.2.1 로터리 작업
빠르게 변하는 로터리 작업의 변동 부하보다는 부하의 큰 추세에 따라 제어 전략을 제시하는 것이 중요하다. 이동 평균 기법을 통해 얻은 부하의 추세 를 실제 부하로 가정하였다. Fig. 8은 다이나믹 프로 그래밍을 통해 얻어낸 로터리 작업에 대한 최적 SOC 경로이다.
처음에 부하가 특정 수준이하일 때, 충전 모드인 것을 확인하였다. 그 이후 부하가 특정 수준 이상으 로 올라가면 모터 어시스트 모드를 이용한다. 또한, 다시 특정 수준 이하로 떨어질 때, 엔진만으로 구동 하거나 충전 모드를 이용한다. 요구되는 부하 토크 의 수준에 따라 모드를 변환하는 전략을 제안한다.
그리고 약 65초간의 짧은 작업임에도 배터리의 SOC가 10% 정도 충전되다가 방전되는 것을 알 수 있다. 높은 부하가 지속적으로 작용하는 일이 발생 하게 되면 배터리가 급속히 소모되어 작업을 중단 해야할 상황이 생길 수 있다. 그러므로 가급적이면 SOC를 높은 수준으로 유지할 필요가 있다. Fig. 9와 Fig. 10은 로터리 작업을 할 때 나타난 작동점을 표 현한 것이다. 모터를 구동할 때는 전 영역의 토크를 사용하는 반면에 발전할 때는 효율이 좋은 지점만 을 사용했다. 엔진은 속도가 동일하고 최적의 효율 을 가진 OOL(Optimal operating line) 부근에서 작동 되기 위해 낮은 부하가 요구될 때 더 높은 토크로 작 동하여 배터리를 충전하게 된다. 엔진의 OOL이나 최대 토크 영역 이상의 토크가 요구되는 경우에는 분명하게 모터를 추가적으로 구동하게 된다. 하이 브리드 동력 시스템의 공정한 평가를 위해 배터리
Fig. 8 Optimal SOC management result of rotary work
김진성․박영일
Fig. 9 Operating point of motor for rotary work
Fig. 10 Operating point of engine for rotary work
의 초기 SOC와 말기 SOC를 동일하게 하는 조건을 가진다. 그리고 모터의 용량이 엔진의 용량보다 현 저히 작은 시스템으로 출력이 한정되므로 엔진의 모든 작동점이 OOL 위에 있지는 않다.
3.2.2 베일러 작업
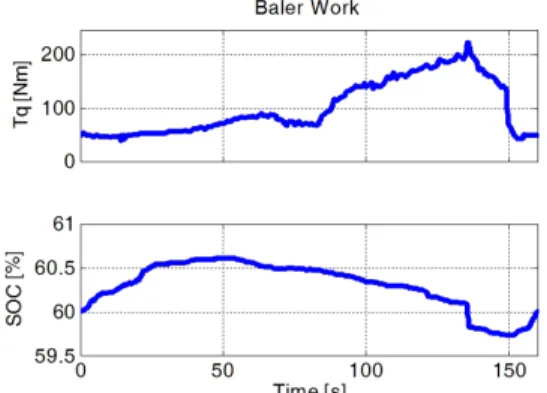
특정한 부하 패턴을 가지는 베일러 작업은 다이 나믹 프로그래밍을 이용한 최적 제어 결과로부터 제어전략을 이끌어 내기에 매우 유리하다. Fig. 11은 다이나믹 프로그래밍을 통해 얻어낸 베일러 작업에 대한 최적 SOC 경로이다.
엔진부하에 여유가 있는 작업 초기에는 충전 모 드로 배터리를 충전하면서 구동 하다가 부하가 특 정 수준 이상이 될 때 모터를 구동하여 하이브리드 모드가 시작된다. 140초 부근에서 상당히 높은 토크 가 요구되면서 배터리를 급격하게 소모하는 모습을 볼 수 있다. 그 이후 부하가 특정 수준 이하로 떨어
Fig. 11 Optimal SOC management result of baler work
Fig. 12 Operating point of motor for baler work
Fig. 13 Operating point of engine for baler work
질 때부터 충전 모드로 들어가 초기 SOC와 동등한 수준인 60%로 유지하도록 작업하는 것을 확인할 수 있다. 이러한 모드 변화를 제어 패턴으로 제공한다 면 충분히 좋은 전략을 모사할 수 있다. Fig. 12와 Fig. 13은 베일러 작업을 할 때 나타난 작동점을 표 현한 것이다. 모터의 작동이 부진한 이유는 베일러
하이브리드 농업용 트랙터의 제어 전략 개발을 위한 작업 부하 분석
작업을 위해서 요구되는 토크를 대부분 엔진만으로 감당할 수 있으므로 굳이 많은 에너지 변환을 통해 동력 소모를 하지 않은 것이다. 그 밖의 전반적인 내 용은 로터리 작업과 크게 다르지 않다.
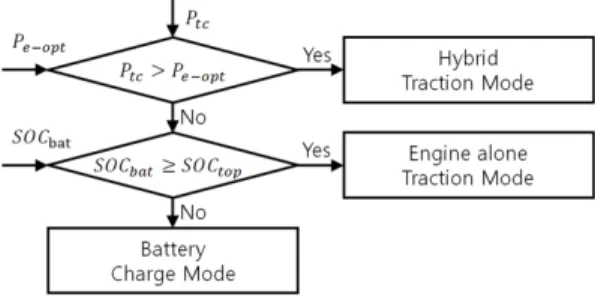
3.2.3 기본적인 제어 전략
앞서 분석된 두 작업에 대한 내용을 종합해 보면, 모드를 전환하기 위한 기준은 부하로 들어오는 부 하토크이다. 또한 짧은 시간의 모터 어시스트 모드 로도 배터리 소모량이 크기 때문에 부하의 크기가 작을 때는 언제든지 충전 모드를 이용해 충전을 하 면서 작업하는 것이 필요하다.
이미 하이브리드 자동차 분야에 널리 알려진 Max. SOC 제어 전략과 일치한다.5) Fig. 14는 하이브 리드 트랙터에 적용하기 위한 Max. SOC 제어 전략 의 플로우 차트이다.
Fig. 14 Flow chart of Max. SOC strategy
4. 결 론
1) 병렬형 하이브리드 트랙터의 제어 전략을 개발 하기 위해 트랙터의 베일러와 로터리에 대한 작 업 부하를 이동 평균 기법과 선형 회귀법을 통해 분석하였다.
분석결과를 보면 토크와 속도의 적분값들이 선 형적으로 표현되며, 이 곡선의 기울기는 작업의 가혹도를 나타내어 트랙터 제어에서 부하의 크 기 분석 대상으로 사용될 수 있다.
2) 다이나믹 프로그래밍을 이용한 최적 제어 시뮬 레이션을 통해 트랙터의 작업을 위한 최적의 입 력조건을 얻었다. 로터리 작업과 베일러 작업은
부하가 작은 작업 초기와 말기에서 충전 모드를 이용하고 각각 부하가 특정 수준 이상이 되면 어 시스트 모드를 이용하고 있다.
3) 최적 입력에 대한 분석을 보면 효율적인 제어를 위해 엔진의 여유가 있을 시 항상 최대 SOC를 유 지하도록 제어하는 제어 전략이 필요하다.
향후, 다양한 작업별 부하에 대한 분석을 위하여 트랙터 작업시험 자료가 필요하며 이를 통해 트랙 터의 다양한 작업 조건에 적용이 가능한 제어 전략 을 개발이 요구된다.
후 기
위 논문은 서울과학기술대학교 교내 학술 연구비 (일부)지원으로 수행되었습니다.
References
1) K. J. Sim, W. Y. Cho, T. G. Park, S. H. Oh, G.
J. Choi and Y. J. Lee, “A Study on the Working Data Measuring and Analysis Technology according to the Tractor Duty Mode,” KSAE Spring Conference Proceedings, pp.159-163, 2011.
2) J. Y. Kim and Y. I. Park, “Analysis of Agricul- tural Working Load Experiments for Reduction Gear Ratio Design of an Electric Tractor Powertrain,” Transactions of KSAE, Vol.20, No.5, pp.138-144, 2012.
3) H. W. Yun, Development of Working Cycle for Performance Evaluation of Tractor Field Ope- rations, M. S. Thesis, Sungkyunkwan University, Suwon, Korea, 2013.
4) S. P. Kim, Essential Kalman Filter, A-JIN, Seoul, 2010.
5) M. Ehsani, Y. Gao and A. Emadi, Modern Electric, Hybrid Electric, and Fuel Cell Vehi- cle, 2nd Edn., pp.284-287, CRC Press, New York, 2007.