Copyright ⓒ The Korean Society for Aeronautical & Space Sciences
Received: January 18, 2016 Revised: December 14, 2017 Accepted: December 14, 2017
688
http://ijass.org pISSN: 2093-274x eISSN: 2093-2480 Int’l J. of Aeronautical & Space Sci. 18(4), 688–696 (2017)DOI: http://dx.doi.org/10.5139/IJASS.2017.18.4.688
Integrated Roll-Pitch-Yaw Autopilot via Equivalent Based Sliding Mode
Control for Uncertain Nonlinear Time-Varying Missile
Ahmed AWAD* and Haoping WANG**
Sino-French International Joint Laboratory of Automatic Control and Signal Processing (LaFCAS), Automation School, Nanjing University of Science & Technology, Nanjing 210094, China
Abstract
This paper presents an integrated roll-pitch-yaw autopilot using an equivalent based sliding mode control for skid-to-turn nonlinear time-varying missile system with lumped disturbances in its six-equations of motion. The considered missile model are developed to integrate the model uncertainties, external disturbances, and parameters perturbation as lumped disturbances. Moreover, it considers the coupling effect between channels, the variation of missile velocity and parameters, and the aerodynamics nonlinearity. The presented approach is employed to achieve a good tracking performance with robustness in all missile channels simultaneously during the entire flight envelope without demand of accurate modeling or output derivative to avoid the noise existence in the real missile system. The proposed autopilot consisting of a two-loop structure, controls pitch and yaw accelerations, and stabilizes the roll angle simultaneously. The Closed two-loop stability is studied. Numerical simulation is provided to evaluate performance of the suggested autopilot and to compare it with an existing autopilot in the literature concerning the robustness against the lumped disturbances, and the aforesaid considerations. Finally, the proposed autopilot is integrated in a six degree of freedom flight simulation model to evaluate it with several target scenarios, and the results are shown.
Key words: Roll-pitch-yaw missile autopilot, Sliding mode control, Flight control system, Robust control
1. Introduction
The design of skid-to-turn missile autopilot is considered as a quite attractive issue in the control field due to its immense nonlinear dynamics, coupling effect between channels, disturbances, and its fast parameters' variation [1]. Unfortunately in high maneuver missiles, the design of autopilot for each plane separately is failed as well. The disturbances including external disturbances, uncertain dynamics, and parameters' perturbation, are extensively existing in missiles and greatly affecting the control performance [2]. The most significant variation of missile parameters is the missile velocity which changes quickly when exposing the missile to sudden acceleration during the boosting phase and deceleration during the gliding phase [3].
Researchers paid considerable amount of attention in
the missile autopilot design field since 1944s [4]. One of the frequently used autopilots was the three-loop autopilot topology [4]. A gain-scheduling design was presented in [5, 6] to overcome the missile dynamics during the entire envelope. Furthermore, robustness issues were proposed with proper developments of H∞ techniques in [7]. The gain scheduling
autopilot ensures global stability only when the missile dynamics are small. In the last two decades, the autopilot based on linear parameter-varying (LPV) techniques was developed as a new, systematic, and strict methodology. An acceleration autopilot design based on LPV reference model was introduced in [8]. These techniques increase the conservative level and most of them except quasi-LPV technique, were still based on the linearization.
The conditions of high maneuverability, and the progress of nonlinear control theory led to the first generation
This is an Open Access article distributed under the terms of the Creative Com-mons Attribution Non-Commercial License (http://creativecomCom-mons.org/licenses/by- (http://creativecommons.org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduc-tion in any medium, provided the original work is properly cited.
* Ph.D. Student
** Professor, Corresponding author: [email protected]
689
Ahmed AWAD Integrated Roll-Pitch-Yaw Autopilot via Equivalent Based Sliding Mode Control for Uncertain Nonlinear ...
http://ijass.org of nonlinear autopilots, which were based on both the
inversion of dynamics [9], and the feedback linearization techniques [10]. New approaches were presented recently based on immediate control techniques: such as Lyapunov stabilization techniques [11], l1 adaptive control [12, 13],
simple adaptive control algorithm [14], backstepping control [15], adaptive control using filtered signals [16], equivalent-input-disturbance approach [17], neural network based dynamic inversion [18], and the state-dependent Riccati equation approach [19]. The approaches introduced in a nonlinear and/or an adaptive context failed when huge unstructured uncertain dynamics existed, and the strict requirements on response speed cannot often be achieved due to adaptation laws. Therefore, robust nonlinear approaches based on the extensive use of Lyapunov direct criterion as in [20], time delay control [21, 22], and sliding mode control (SMC) techniques as in [23], were introduced, demonstrating good performance. All approaches based on these methods have been only applied for single-input/ single-output models, disregarding the coupling effect. A few works considered the coupling effect between missile channels. For example, a robust backstepping technique was applied to multi-input/multi-output (MIMO) model [1], a axis autopilot design using the classical three-loop autopilot approach [24], and an integrated acceleration autopilot based on a linear robust control [25]. These studies show a good performance while keeping missile velocity constant and the controller design is still based on linearization except [1]. A sliding mode based integrated attitude and acceleration autopilot for a time-varying velocity missile was presented in [3]. It showed a good performance in MIMO way but the disturbances, and missile parameters' variation were neglected.
Thus, in this paper, a design of integrated roll-pitch-yaw autopilot using an equivalent based sliding mode control (EBSMC) approach for a skid-to-turn nonlinear time-varying (STTNTV) missile system with lumped disturbances in its six-equations of motion, is proposed to achieve a good tracking performance in the presence of disturbances during the entire flight envelope in MIMO way without seeking for accurate modeling. The suggested approach consists of equivalent, and switching control where the norm of lumped disturbances is used to robustify the controller against the disturbances. The proposed autopilot employs multi proposed sliding surfaces to overcome the model complexity , and to avoid the output derivative in the obtained control laws to avoid the noise existence in the real output measurements.
The remaining paper is organized as follows. In section II, system modeling, and problem statements are provided. In
section III, roll-pitch-autopilot design based on EBSMC, and the closed loop stability analysis are presented. In section IV, numerical simulations are illustrated, and section V is devoted to summary and concluding remarks.
2. System Description and Modeling
The description of missile system, and its mathematical modeling are shown as follows.
2.1 System Description
The STTNTV missile system with lumped disturbances in its six-equations of motion, is axis-symmetric, cruciform shape, and aerodynamically controlled via canard control. Therefore, the functions of missile moments of inertia Iyy(t),
and Izz(t) are identical, and products of inertia moments can
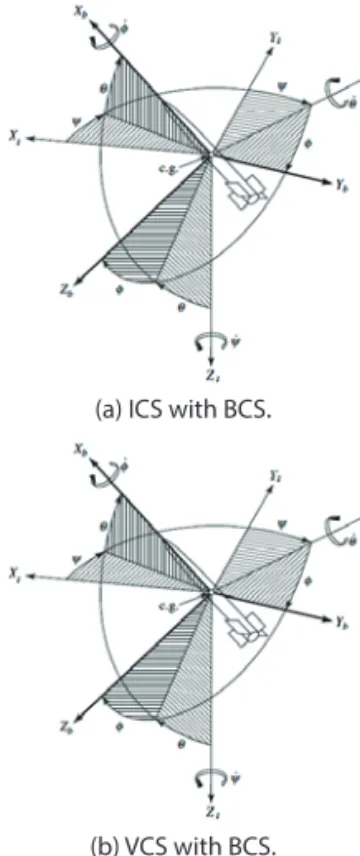
be discarded. Gravity effect can be neglected but considered in the guidance loop. The coefficients of aerodynamic forces and moments obtained from aerodynamic coefficients' database based on experimental data, are functions of mach number M, angle of attack α, side slip angle β, roll fin deflection δr, pitch fin deflection δp, and yaw fin deflections
δy. As a result of measuring the missile states and its dynamic
parameters in different coordinates; the orientation of inertial coordinate system (ICS), body coordinate system (BCS), and velocity coordinate system (VCS) and the related
single-input/single-output models, disregarding the
coupling effect. A few works considered the coupling effect
between missile channels. For example, a robust
backstepping
technique
was
applied
to
multi-input/multi-output (MIMO) model [1], a three-axis
autopilot design using the classical three-loop autopilot
approach [24], and an integrated acceleration autopilot
based on a linear robust control [25]. These studies show a
good performance while keeping missile velocity constant
and the controller design is still based on linearization
except [1]. A sliding mode based integrated attitude and
acceleration autopilot for a time-varying velocity missile
was presented in [3]. It showed a good performance in
MIMO way but the disturbances, and missile parameters'
variation were neglected.
Thus, in this paper, a design of integrated roll-pitch-yaw
autopilot using an equivalent based sliding mode control
(EBSMC) approach for a skid-to-turn nonlinear
time-varying (STTNTV) missile system with lumped
disturbances in its six-equations of motion, is proposed to
achieve a good tracking performance in the presence of
disturbances during the entire flight envelope in MIMO way
without seeking for accurate modeling. The suggested
approach consists of equivalent, and switching control
where the norm of lumped disturbances is used to robustify
the controller against the disturbances. The proposed
autopilot employs multi proposed sliding surfaces to
overcome the model complexity , and to avoid the output
derivative in the obtained control laws to avoid the noise
existence in the real output measurements.
The remaining paper is organized as follows. In section II,
system modeling, and problem statements are provided. In
section III, roll-pitch-autopilot design based on EBSMC,
and the closed loop stability analysis are presented. In
section IV, numerical simulations are illustrated, and section
V is devoted to summary and concluding remarks.
2
System Description and Modeling
The description of missile system, and its mathematical
modeling are shown as follows.
2.1 System Description
The STTNTV missile system with lumped disturbances in
its six-equations of motion, is axis-symmetric, cruciform
shape, and aerodynamically controlled via canard control.
Therefore, the functions of missile moments of inertia I
yy(t),
and I
zz(t) are identical, and products of inertia moments can
be discarded. Gravity effect can be neglected but considered
in the guidance loop. The coefficients of aerodynamic forces
and moments obtained from aerodynamic coefficients'
database based on experimental data, are functions of mach
number M, angle of attack α, side slip angle β, roll fin
deflection δ
r, pitch fin deflection δ
p, and yaw fin deflections
δ
y. As a result of measuring the missile states and its
dynamic parameters in different coordinates; the orientation
of inertial coordinate system (ICS), body coordinate system
(BCS), and velocity coordinate system (VCS) and the
related angles between them, are depicted in Fig. 1.
a) ICS with BCS.
b) VCS with BCS.
Fig. 1: Coordinate systems orientation, and their angular relations.
2.2 Mathematical Modeling
The missile models in [26-28] are developed and the
STTNTV missile system with lumped disturbances in its
six-equations of motion, are expressed as follows:
,
( )
( )
x x xF
a x x xa
d F T t sQC
m t
, (1)
,
( )
y y y yF
a y ya
d F
sQ C
C
m t
, (2)
,
( )
z p z zF
a z pa
d F
sQ C
C
m t
, (3)
( )
2
p r l l r p xx msQl
C pl
p
C
d
I t
V
, (4)
( )
2
q p m m m p q yy msQl
C ql
q
C
C
d
I t
V
, (5)
( )
2
r y z n n n y r z msQl
C rl
r
C
C
d
I t
V
, (6)
1 cos sin sin tan cos tan
cos z x m q a a r p V
, (7)
1cos ycos xcos sin zsin sin sin
m
r a a a p
V
,
(8)
sin tan
cos tan
p q
r
, (9)
cos
sin
q
r
, (10)
with
0 2 2 2 , 0 .5 2 m m V u v w Q V, (11)
, , x y z u a rv qw v a pw ru w a pv qu, (12)
where I
xx(t) is the function of missile moment of inertia
around BCS x-axis. p, q, and r are missile angular rates in
roll, pitch, and yaw planes, respectively. φ and θ are missile
(a) ICS with BCS.
single-input/single-output models, disregarding the
coupling effect. A few works considered the coupling effect
between missile channels. For example, a robust
backstepping
technique
was
applied
to
multi-input/multi-output (MIMO) model [1], a three-axis
autopilot design using the classical three-loop autopilot
approach [24], and an integrated acceleration autopilot
based on a linear robust control [25]. These studies show a
good performance while keeping missile velocity constant
and the controller design is still based on linearization
except [1]. A sliding mode based integrated attitude and
acceleration autopilot for a time-varying velocity missile
was presented in [3]. It showed a good performance in
MIMO way but the disturbances, and missile parameters'
variation were neglected.
Thus, in this paper, a design of integrated roll-pitch-yaw
autopilot using an equivalent based sliding mode control
(EBSMC) approach for a skid-to-turn nonlinear
time-varying (STTNTV) missile system with lumped
disturbances in its six-equations of motion, is proposed to
achieve a good tracking performance in the presence of
disturbances during the entire flight envelope in MIMO way
without seeking for accurate modeling. The suggested
approach consists of equivalent, and switching control
where the norm of lumped disturbances is used to robustify
the controller against the disturbances. The proposed
autopilot employs multi proposed sliding surfaces to
overcome the model complexity , and to avoid the output
derivative in the obtained control laws to avoid the noise
existence in the real output measurements.
The remaining paper is organized as follows. In section II,
system modeling, and problem statements are provided. In
section III, roll-pitch-autopilot design based on EBSMC,
and the closed loop stability analysis are presented. In
section IV, numerical simulations are illustrated, and section
V is devoted to summary and concluding remarks.
2
System Description and Modeling
The description of missile system, and its mathematical
modeling are shown as follows.
2.1 System Description
The STTNTV missile system with lumped disturbances in
its six-equations of motion, is axis-symmetric, cruciform
shape, and aerodynamically controlled via canard control.
Therefore, the functions of missile moments of inertia I
yy(t),
and I
zz(t) are identical, and products of inertia moments can
be discarded. Gravity effect can be neglected but considered
in the guidance loop. The coefficients of aerodynamic forces
and moments obtained from aerodynamic coefficients'
database based on experimental data, are functions of mach
number M, angle of attack α, side slip angle β, roll fin
deflection δ
r, pitch fin deflection δ
p, and yaw fin deflections
δ
y. As a result of measuring the missile states and its
dynamic parameters in different coordinates; the orientation
of inertial coordinate system (ICS), body coordinate system
(BCS), and velocity coordinate system (VCS) and the
related angles between them, are depicted in Fig. 1.
a) ICS with BCS.
b) VCS with BCS.
Fig. 1: Coordinate systems orientation, and their angular relations.
2.2 Mathematical Modeling
The missile models in [26-28] are developed and the
STTNTV missile system with lumped disturbances in its
six-equations of motion, are expressed as follows:
,
( )
( )
x x xF
a x x xa
d F T t sQC
m t
, (1)
,
( )
y y y yF
a y ya
d F
sQ C
C
m t
, (2)
,
( )
z p z zF
a z pa
d F
sQ C
C
m t
, (3)
( )
2
p r l l r p xx msQl
C pl
p
C
d
I t
V
, (4)
( )
2
q p m m m p q yy msQl
C ql
q
C
C
d
I t
V
, (5)
( )
2
r y z n n n y r z msQl
C rl
r
C
C
d
I t
V
, (6)
1 cos sin sin tan cos tan
cos z x m q a a r p V
, (7)
1cos ycos xcos sin zsin sin sin
m
r a a a p
V
,
(8)
sin tan
cos tan
p q
r
, (9)
cos
sin
q
r
, (10)
with
0 2 2 2 , 0 .5 2 m m V u v w Q V, (11)
, , x y z u a rv qw v a pw ru w a pv qu, (12)
where I
xx(t) is the function of missile moment of inertia
around BCS x-axis. p, q, and r are missile angular rates in
roll, pitch, and yaw planes, respectively. φ and θ are missile
(b) VCS with BCS.
Fig. 1. Coordinate systems orientation, and their angular relations.