탄성지지된 가동코일형 능동마운트의 성능 분석
A Performance Analysis of Active Mount with Moving-Coil type
Electromagnetic Actuator Installed on the Elastic Foundation
정우진
†‡
․ 배수룡
* ․ 전재진*
Woo-Jin Jung, Soo-Ryong Bae and Jae-Jin Jeon
Key Words : Active Mount(능동 마운트), Moving-Coil type Electromagnetic Actuator(가동코일형 전자기식 작동기),
Elastic Foundation(탄성 받침대), Underwater Radiated Noise(수중 방사소음) ABSTRACT
Underwater radiated noise is one of the vital factors in underwater weapon systems like submarine. A passive elastic mount is an effective reduction method for the vibration from a ship-board machinery transmitted to the hull which is radiated as noise outside the hull. A passive elastic mount shows the limitation on the vibration reduction and needs multi stage mounting system includ-ing double stage one to meet the required underwater radiated noise criteria. It is necessary for the multi stage mounting system to consider the large displacement in the underwater shock explosion. So it is difficult to apply the multi stage mounting system in submarine because of space limitation. Also recent navy sonar system are trying to have the capability to detect the ship-borne acoustic signals in the low frequency range. An alternative to the passive mount is an active mount with moving-coil type electromagnetic actuator based on a conventional rubber mount in the low frequency range. In the previous paper, 4 active mounts with moving-coil type electromagnetic actuator based on the rub-ber mount were installed on the hard floor of the facility, which means no consideration on the elastic foundation effect for the control of the active mounts was taken into account.
In this study, an experimental performance analysis on the active mount was carried out using 4 active mounts installed on the cylindrical structure to investigate the elastic foundation effect.
1) 1. 서 론 잠수함을 포함한 수중무기체계에서 발생되어 외 부로 전파되는 수중 방사소음은 중요한 피탐성분 및 식별인자로 작용하고 있으며, 현대 수중음향 탐지체 계의 지속적인 발전으로 수중 방사소음 저감은 더욱 중요하게 되었다. † 교신저자; 정회원, 교신저자 소속 E-mail : 교신저자 E-mail Tel : , Fax : ‡ 발표자; 발표자 소속 * 공동저자의 소속 수중무기체계로부터 발생되는 수중 방사소음 저 감대책으로는 아래와 같이 나눌 수 있다. 1) 소음원으로 작용하는 탑재장비들의 저소음화 2) 탄성마운트를 이용한 선체전달 진동저감 현재 기술수준을 고려할 때 획기적인 탑재장비 저소음화 구현은 당분간 어려울 것으로 예상되나, 고무마운트로 대표되는 수동형 탄성마운트를 이용한 진동저감 대책은 매우 효과적인 방법임이 입증되어 잠수함을 포함한 수중무기체계의 저소음화를 위한 필수적인 진동감소대책으로 적용되고 있다. 그러나 수동형 탄성마운트를 이용한 진동저감 성 능은 기술적 한계에 도달하여 잠수함과 같은 수중무 기체계에서 요구하는 높은 수준의 수중방사소음 기 한국소음진동공학회 2014년 추계학술대회
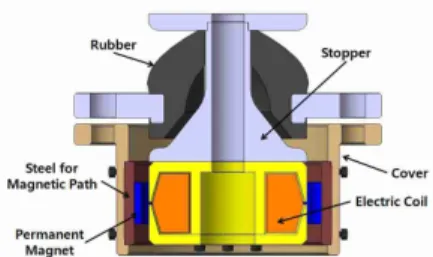
준을 만족하기 위해서는 2단 마운팅 시스템을 포함 한 다단 마운팅 시스템(multi stage mounting system)을 적용해야 한다. 다단 마운팅 시스템은 수 중폭발 충격과 같은 외부 충격력이 작용하는 경우에 는 큰 허용변위를 고려해야 하므로 잠수함과 같이 제한된 공간에서 적용하기는 곤란하다. 또한 현대 수중음향 탐지체계들은 저주파대역에서 발생하는 수 중 방사소음도 탐지하려는 추세이므로 저주파대역에 서의 저소음화도 필요하다. 수동형 탄성마운트의 진동저감 성능을 증대시키 기 위한 대안으로 수동형 탄성마운트를 기반으로 액 츄에이터를 결합한 능동마운트들이 연구되고 있으 며, 특히 함정분야에서는 고무마운트를 기반으로 100Hz 대역 이상부터 능동제어 효과가 발생되는 압 전작동기를 이용한 고주파 대역용 능동마운트(1)(2)와 20Hz 대역부터 능동제어가 가능한 영구자석을 이용 한 전자기식 작동기를 이용한 저주파 대역용 능동마 운트가 연구되어 왔다(3)~(5). 저자를 포함한 연구자들이 제시한 저주파 대역용 능동마운트의 진동저감 성능은 능동마운트를 단단한 구조물에 설치하여 개별적으로 작동하는 환경에서 제시된 결과들이다. 그런데 잠수함과 같은 수중무기 체계에 탑재될 수 있는 경우를 고려하면 능동마운트 는 잠수함 선체 또는 받침대위에 설치될 가능성이 매우 높으므로 능동마운트 하부에 탄성받침대의 영 향을 고려해야 한다. 본 논문에서는 능동마운트 하부에 탄성구조물이 존재할 경우에 능동마운트의 진동저감 성능 분석을 위하여 가동코일형 능동마운트 4개를 소형 원통구조 물 내부에 설치하고, 그 위에 소형 모터를 가진원으 로 작동되도록 실험체계를 구성한 후 이들을 이용한 능동마운트 성능분석을 수행하였다. 2. 실험 구성 2.1 가동코일형 능동마운트 본 연구에서는 참고문헌(5)에 제시된 능동마운트 와 동일한 방식의 가동코일형 작동기와 SC-6K100 이라는 고무마운트(6)를 결합한 능동마운트를 이용하 였으며, Fig. 1에는 본 논문에서 적용한 능동마운트 단면을 나타내었다. Fig. 1에 나타낸 바와 같이 원형구조물 주위로 전 기코일(Electric Coil)이 감겨져 있으며, 이 전기코일 에 전류를 인가하면 1mm 간극으로 이격되어 있는 영구자석과 상호작용으로 인하여 수직방향으로 전기 코일이 설치된 구조물이 수직방향으로 이동하게 되 어 진동제어력을 발생시키는 구조이다. 이때 고무마 운트의 허용하중이 22kg~45kg 으로 본 논문에서는 고무마운트에 발생하는 정적하중이 22kg 이 되도록 구성하였다.
Fig. 1 The Cross Section of Active Mount 2.2 실험 구성 일반적으로 함정 내부에서 마운트가 설치되는 형 태를 고려하여 Fig. 2 와 같이 직경 600mm, 길이 608mm 인 소형 원통구조물 내부에 4개의 가동코일 형 능동마운트를 설치하였다. 이때 능동마운트 상부 에는 가진원으로 사용할 모터와 이를 지지하는 받침 대 구조물의 총 무게가 88kg 수준으로 설계하여 설 치하였다. 모터가 작동하면 모터 앞부분에 설치된 불평형 무게에 의한 기진력이 발생하여 모터 하부에 있는 받침대와 능동마운트를 통하여 소형 원통구조 물에 진동이 전달되게 된다. 따라서 모터가 작동할 때 발생하는 진동이 능동마운트를 통해 소형 원통구 조물에 전달되는 진동을 저감하는 것이 능동마운트 목표이다.
(a) Drawing (b) Photo Fig. 2 Experimental Structure with 4 Active Mount
먼저 첫 번째 가진주파수로 28Hz가 되도록 모터 에 전압을 인가하여 회전수를 조정하였다. 모터가 작동하는 동안에 첫 번째 가진주파수의 하모닉성분 들도 출현하며 본 논문에서는 진동제어 대상으로 첫 번째 가진주파수의 3차 하모닉 성분인 84Hz 까지를 제어대상으로 하였다. 모터로부터 소형 원통구조물에 전달되는 진동 저 감을 확인하기 위하여 4개 능동마운트별 하단에 가 속도계를 설치하였으며, 가속도 신호는 제어기와 모 니터링 장치로 보내진다.
Fig. 3 Experimental Active Control Configuration 능동마운트 성능실험을 위한 능동제어 구성도는 Fig. 3과 같다. 제어기의 H/W는 dSpace사 제품을 사용하였으며, 생성된 제어신호는 전자기식 작동기 용 DC Driver를 통해 가동코일형 능동마운트에 전 류형태로 전달된다. 제어 알고리즘은 참고문헌 (5)에 서 사용한 Multiple Channel Filtered-X LMS 알고 리즘을 이용하였으며, Fig. 4에 나타내었다.
Fig. 4 Experimental Active Control Configuration
3. 실험 결과
실험은 28Hz를 첫 번째 가진주파수가 되도록 모
터 회전수를 조정하여 수행하였다. 능동마운트의 가 동코일형 전자기식 작동기를 작동하지 않은 경우를 ‘Control OFF’라 하고, 작동할 경우에는 ‘Control ON’ 이라고 하였다. Fig. 5는 모터가 작동하고 있 는 상태에서 가동코일형 능동마운트 한 개씩 개별적 으로 전자기식 작동기를 작동시켜 제어하였을 경우 에 능동마운트 하부의 소형 원통구조물에서 계측한 가속도 신호를 주파수 영역에서 보여주고 있다. 이때 본 논문에서 적용한 제어알고리즘은 두 개 의 파라미터값을 사용자가 입력하게 되어있는데 능 동마운트 개별 제어 시 적용한 파라미터값들은 아래 의 Table 1에 수록하였다. Mount No. 1st:28(Hz) 2nd:56(Hz) 3rd:84(Hz) P1 P2 P1 P2 P1 P2 1 0.1 10 -0.1 10 -0.1 5 2 -0.1 10 0.1 10 0.1 10 3 -0.1 10 -0.1 10 0.1 5 4 0.1 10 -0.1 10 -0.1 5
Table 1 Parameters for Individual Control
Fig. 5 Test Results for Individual Control Fig. 5를 살펴보면 100Hz이하의 영역에서 28Hz, 56Hz, 84Hz에서 피크가 나타나고 있음을 확인할 수 있으며, 이들 주파수가 본 논문에서 제어대상 주 파수들이다. 또한 Table 2에는 제어대상인 3개의 가 진주파수에서 능동마운트를 개별적으로 제어할 경우 에 나타난 가속도 신호를 제어전과 제어후로 나누어 서 값으로 나타내었다.
Mount No. Control Target Frequency 1st:28(Hz) 2nd:56(Hz) 3rd:84(Hz) 1 OFF 83.85 71.29 69.08 ON 68.63 45.57 50.16 Results 15.22 25.72 18.92 2 OFF 71.36 68.78 53.28 ON 53.37 50.88 41.35 Results 17.99 17.89 11.93 3 OFF 83.21 80.71 74.58 ON 54.40 51.92 56.85 Results 28.80 28.79 17.73 4 OFF 86.98 64.92 68.74 ON 54.45 44.90 52.54 Results 32.53 20.02 16.20
Table 2 Test Results for Individual Control
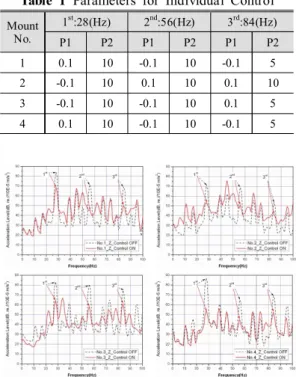
이 결과 능동마운트를 개별적으로 제어할 경우에 소형 원통구조물로 전달되는 진동수준을 고무마운트 만 있을 경우에 비하여 최저 11.93dB 이상 저감시 키고 있음을 알 수 있다. 다음으로는 개별적인 제어대신 소형 원통구조물 에 설치된 4개의 능동마운트를 동시에 제어하는 실 험을 수행하였다. 이때 적용한 능동제어용 파라미터 값들은 아래의 Table 3에 수록하였다. Mount No. 1st:28(Hz) 2nd:56(Hz) 3rd:84(Hz) P1 P2 P1 P2 P1 P2 1 0.1 10 -0.1 5 -0.01 5.5 2 -0.1 10 0.1 7 0.1 10 3 -0.1 20 -0.1 15 0.1 7 4 0.1 15 -0.01 15 -0.1 5
Table 3 Parameters for Simultaneous Control
Fig. 6 Test Results for Simultaneous Control
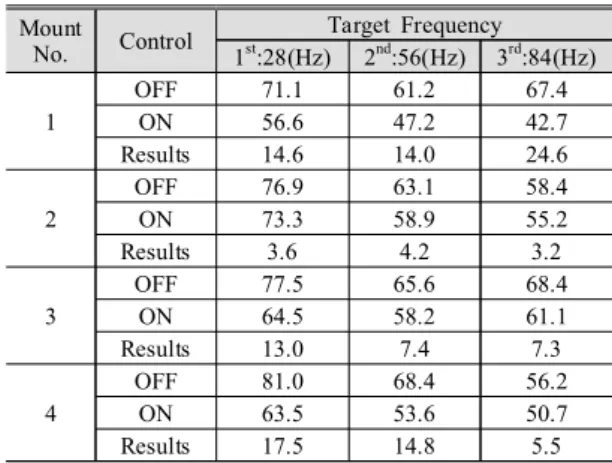
Mount No. Control Target Frequency 1st:28(Hz) 2nd:56(Hz) 3rd:84(Hz) 1 OFF 71.1 61.2 67.4 ON 56.6 47.2 42.7 Results 14.6 14.0 24.6 2 OFF 76.9 63.1 58.4 ON 73.3 58.9 55.2 Results 3.6 4.2 3.2 3 OFF 77.5 65.6 68.4 ON 64.5 58.2 61.1 Results 13.0 7.4 7.3 4 OFF 81.0 68.4 56.2 ON 63.5 53.6 50.7 Results 17.5 14.8 5.5
Table 4 Test Results for Simultaneous Control
Fig. 6과 Table 4를 살펴보면 3개의 가진주파수에 서 제어전과 제어후의 차이가 No.1 능동마운트는 최소 14dB 이상 제어효과가 있음을 알 수 있으나, No.2 능동마운트에서는 최소 3.2dB, No.3 능동마운 트에서는 최소 7.3dB, No.4 능동마운트에서는 최소 5.5dB의 제어효과가 있음을 보여주고 있어 각 능동 마운트 위치별로 제어효과가 많은 차이가 발생하고 있는 것도 확인할 수 있어 소형 원통구조물의 탄성 효과를 포함한 추가적인 검토가 필요할 것으로 보인 다. 선체진동에 의한 수중방사소음에 따른 수중피탐 거리를 고려하면 능동마운트를 적용하여 6dB 이상 의 진동저감효과가 필요할 것으로 생각된다. 그리고 제어대상이 아닌 주파수 대역에서는 오히 려 제어후의 진동수준이 높아지는 역효과 현상도 발 생하고 있는 것으로 나타나고 있다. 제어후의 진동 수준이 높아지는 주파수 대역에서는 높아진 진동수 준으로 인하여 수중방사소음 수준이 높아질 가능성 이 매우 크므로 이들 역효과 감소를 위한 상세한 검 토도 필요할 것으로 보인다. 4. 결 론 본 연구에서는 4개의 가동코일형 능동마운트를 이용하여 모터 진동이 소형 원통구조물로 전달되는 시스템의 진동저감 성능 실험을 수행하였다. 가동코일형 능동마운트를 각각 독립적으로 제어 한 결과 각 마운트위치에서의 진동이 저감된 것을 확인할 수 있었다. 각 능동마운트별 진동제어를 통 한 진동저감 성능은 평균 10dB 이상인 것으로 확인
되었다. 그러나 4개 능동마운트를 동시에 제어하는 경우에는 진동저감 성능이 평균 3dB 수준으로 떨어 지는 것으로 나타났다. 이는 능동마운트 하단부가 하나의 원통구조물위에 설치되어 상호 영향을 미치 는 경우의 진동제어에는 개별적으로 능동마운트를 제어하는 알고리즘은 적합하지 않을 수도 있다는 것 을 보여주는 것으로 생각된다. 향후 능동마운트 하부가 하나의 탄성구조물상에 설치되는 경우에 대한 효과적인 진동저감 성능 구현 과 제어대상 주파수 이외에서 진동수준이 높아지는 역효과 억제 및 수평방향의 진동성분도 저감할 수 있는 능동마운트 개발계획을 수립하고 추진할 예정 이다. 참 고 문 헌
(1) Moon, S. J., Choi, S. M., Jeong, J. A., Choi, S. B., Jung, W. J and Koo, J. Y., 2010, A Study on Development of an Active Hybrid Mount for Naval Shipboard Equipment, Transactions of the Korean Society for Noise and Vibration Engineering. Vol. 20, No. 7, pp. 685~692.
(2) Moon, S. J., Choi, S. M., Nguyen, V. Q., Oh, J. S., Choi, S. B., Chung, J. H., Kwon, J. I and Jung, W. J., 2013, An Inertia-type Hybrid Mount Combining a Rubber Mount and a Piezostack Actuator for Naval Shipboard Equipment, International Journal of Naval Architecture and Ocean Engineering, Vol. 5, pp. 62~80.
(3) Cho, H. Y., Shin, Y. H., Moon, S. J., Jung, W. J. and Won, M. C., 2012, Concept Design of Electro-magnetic Actuator for Development of Active Hybrid Mount Applied to Naval Shipboard Equipment, Proceedings of the KSNVE Annual Spring Conference, pp. 650~651
(4) Cho, H. Y., Moon, S. J., Shin, Y. H., Jung, W. J. and Won, M. C., 2012, A Comparative Study on the Dynamic Characteristics and Control Performances of Hybrid Mounts according to Element Configuration, Transactions of the Korean Society for Noise and Vibration Engineering. Vol. 22, No. 6, pp. 551~558.
(5) Shin, Y. H., Moon, S. J., Cho, H. Y., Jung, W. J., Jeon, J. J. and Won, M. C., 2013, A New Mount with Moving-Coil Type Electromagnetic Actuator for Naval Shipboard Equipment, Transactions of the Korean Society for Noise and Vibration Engineering. Vol. 23, No. 10, pp. 885~894.