굴삭기의 정적/동적 응력 및 구동 특성 계측
김규성†· 정준모†· 장영식†· 최익흥†· 이준희*
Measurement of Static and Dynamic Stress and Motion Characteristics of Excavators
Gyu-Sung Kim, Joon-Mo Choung, Young-Sik Jang, Ick-Hung Choe and Joon-Hee Lee
Key Words : Excavator(굴삭기), Hydraulic cylinder(유압 실린더), Stress measurement(응력계측), Max. digging force(최대 굴삭력), Natural frequency(고유 진동수)
Abstract
This paper presents static and dynamic measurement of the stress and motion characteristics for crawler type excavators. Eight scenarios were prepared for static measurement based on two extreme digging positions, maximum digging reach position and maximum digging force position. The measured items for static motion included stress, cylinder pressure, cylinder stroke and digging force. The measured static stresses showed that asymmetric digging force acting on a bucket induced higher stress level than symmetric one. The measured static pressures and digging forces also agreed with design pressures and design digging forces, respectively. The dynamic measurement was performed for two types of motion, that is, simple reciprocation of each cylinder and actual digging motion. The measured items for dynamic motion were stroke and pressure of each cylinder, stresses on the working device and acceleration on the upper plate of an arm. The measured data showed that the natural frequency of the excavator highly depended on the hydraulic stiffness of cylinders. Digging motion tests revealed that digging motion was closer to static motion rather than dynamic one.
1. 서 론
굴삭기(Excavator)는 다양한 작업이 가능한 대표 적인 건설장비 중의 하나로서 최근의 대형화, 고 성능화, 다목적화 경향에 따라 기능적 품질뿐만 아니라 구조적 신뢰성의 향상 및 편의성, 환경친 화성의 요구도 증대되고 있는 실정이다. 또한, 작 업의 특성상 다양한 하중을 경험하므로 명확한 구 조안전성 평가 및 수명 예측을 위해서는 정적/동 적 강도 특성 및 구동 특성의 파악이 필요하다.
그러므로, 본 연구에서는 유압 실린더(Hydraulic cylinder)와 유압 모터로 구동되는 중형급 궤도형 (Crawler type) 굴삭기를 대상으로 정적/동적 응력, 유 압 실린더 압력 및 변위, 작업장치(Working device)의
가속도 등을 계측하고 이를 분석함으로써 굴삭기의 강도 특성 및 구동 특성을 파악하고자 한다. 또한, 이러한 계측 자료는 향후 강도 해석(Strength analysis) 및 동작 해석(Motion analysis)에 기반한 설계/해석 기 법의 정립에 유용한 자료로 활용될 수 있다.
2. 계측 자세의 선정
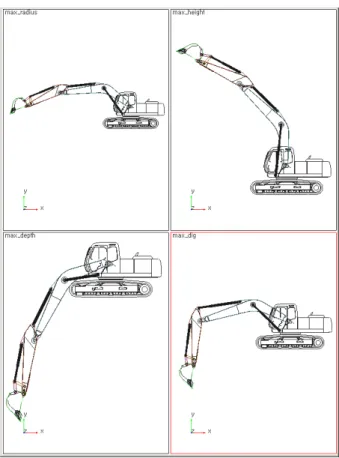
다관절로 이루어진 굴삭기의 작업 형태는 매우 다 양하지만 가장 일반적인 기능인 굴삭 작업은 굴삭 (Digging), 인양(Lifting), 선회(Swing), 상차(Dumping) 를 포함하는 일련의 연속 작업으로 구성된다. 또한 굴삭 작업시 작업장치의 위치에 따라 최대 굴삭 반 경(Max. digging reach) 자세, 최대 굴삭 깊이(Max.
digging depth) 자세, 최대 굴삭 높이(Max. digging height) 자세로 구분할 수 있으며 굴삭력 관점에서 최대 굴삭력(Max. digging force) 자세도 계측 대상 자 세로서 고려될 수 있다 (1) (Fig. 1 참조).
† 현대중공업 구조연구실 E-mail : [email protected]
TEL : (052)230-5549 FAX : (052)250-9580 * 현대중공업 건설장비건장설계부
Fig. 1 Working positions of an Excavator
2.1 정적 계측 자세
앞에서 언급한 4 가지의 자세 중에서 시험장의 여건 등을 감안하여 최대 굴삭 반경 자세와 최대 굴삭력 자세를 선정하였다. 또한 구동 실린더를 버킷(Bucket) 실린더 및 암(Arm) 실린더로 구분하 여 계측을 수행하였으며 굴삭 동작시 버킷 끝단에 작용하는 하중의 대칭성 여부에 따라 대칭 굴삭 및 비대칭 굴삭으로 구분하였다. Fig. 2 는 대칭 굴 삭을 나타내고 있으며, 버킷의 한 쪽 측면에 와이 어를 걸 경우에는 비대칭 굴삭 조건이 된다. 따라 서 정적 계측을 위하여 Table 1 과 같이 8 가지 시 나리오가 마련되었다.
Fig. 2 Symmetric digging position
Table 1 Scenarios for static measurement Load
case
Working position
Actuated cylinder
Symmetry / Asymmetry SLC1 Max. digging
reach Bucket Symmetry SLC2 Max. digging
reach Arm Symmetry SLC3 Max. digging
reach Bucket Asymmetry SLC4 Max. digging
reach Arm Asymmetry SLC5 Max. digging
force Arm Asymmetry SLC6 Max. digging
force Bucket Asymmetry SLC7 Max. digging
force Arm Symmetry SLC8 Max. digging
force Bucket Symmetry 2.2 동적 계측 자세
굴삭기의 유압 실린더를 각각 단독으로 구동하 는 단독 동작(Cylinder reciprocation)과 실제로 토사 를 굴삭하여 상차하는 연속 굴삭 작업(Continuous digging motion)으로 나누어 계측을 수행하였다.
2.2.1 단독 동작
단독 동작이란 붐(Boom) 실린더, 암 실린더, 버 킷 실린더를 각각 독립적으로 작동시켜 각각의 작 업 장치의 성능을 계측하기 위한 동작이다.
2.2.2 연속 굴삭 작업
연속 굴삭 동작은 굴삭기의 실제 작업 자세 중에 서 가장 많은 시간을 점유하는 자세로서 Fig. 1 에 나 타낸 4 가지의 최대 자세 중에서 최대 굴삭 높이 자세를 제외한 3 가지 자세를 계측하였다. 이때 선 회는 약 90 도, 엔진 회전수는 2200 rpm 의 고속 모드에 대해서 계측을 실시하였다. Fig. 3 은 연속 굴삭 동작 중 굴삭 후 인양하는 모습을 나타내고 있다.
Fig. 3 Continuous digging motion
3. 정적 계측
3.1 계측 항목 및 계측 지점
작업장치 및 본체(Base machine)의 응력, 버킷 의 정지 굴삭력, 버킷 및 암 실린더의 대실 (Large chamber) 및 소실(Small chamber) 압력, 각 실린더 길이의 4 가지 항목이 계측되었다.
응력 계측을 위한 스트레인 게이지의 부착 위 치는 응력의 구배가 심하지 않은 부분을 위주로 선정하였으며, 채널 No. 1~6 은 암, 채널 No. 7~15 는 붐, 채널 No. 16~20 은 상부 선회체(Upper structure), 채널 No. 21~26 은 하부 주행체(Under carriage)에서 계측된 응력이다. 채널 No. 17~19, No.
21~23 및 No. 24~26 은 로제트를 구성하고, 나머지 는 1 축 게이지이다. Fig. 4 는 부착된 스트레인 게 이지 중에서 상부 선회체에 부착된 일부이다.
압력 계측을 위해 암 실린더 및 버킷 실린더 의 확장 및 수축 포트에 각각 압력계를 설치하 였으며, 로드셀을 사용하여 버킷 끝단에 작용하 는 굴삭력을 계측하였다. 실린더 길이는 줄자를 이용하여 실린더 핀 사이의 거리를 직접 계측하 였다.
3.2 계측 결과
Table 2 는 각각의 하중 시나리오에 대하여 계측된 실린더 압력과 버킷 굴삭력을 나타내며, 버킷과 암 실린더의 설계 압력이 32 MPa 내외임을 감안하면 구동 실린더의 압력이 설계 압력에 거의 일치함을 볼 수 있다. 또한, 최대 굴삭력 자세에서 버킷 실린 더를 구동하는 경우에 가장 큰 굴삭력을 나타냈다.
SCL1 과 SCL3 의 암 실린더 압력이 나타나지 않는 이유는 암 실린더가 완전히 접힌 상태에서 암 실 린더의 압력이 정확히 계측되지 못했기 때문이다.
17 18 19
20 50mm 16
Fig. 4 Position of strain gages at upper structure
Table 2 Cylinder pressures and digging forces from static measurement
Load Case
Bucket cylinder Pressure [MPa]
Arm cylinder Pressure [MPa]
Digging Force [ton]
SLC1 30.9 0.3 11.0
SLC2 23.3 31.1 9.1
SLC3 30.5 0.1 10.7
SLC4 23.5 31.2 9.1
SLC5 23.3 32.4 10.7
SLC6 31.1 28.2 10.5
SLC7 23.6 32.1 11.0
SLC8 31.2 26.4 12.0
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 Channel number
-40 0 40 80 120
Stress [MPa]
SLC1 SLC2 SLC3 SLC4
(a) Max. digging reach position
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 Channel number
-80 -40 0 40 80 120 160
Stress [MPa]
SLC5 SLC6 SLC7 SLC8
(b) Max. digging force position
Fig. 5 Stress comparison for various measurement conditions
Fig. 5 는 각 시나리오에 대한 응력 계측 결과를 나타낸다. 굴삭력의 대칭성과 구동 실린더가 같은 조건이라도 최대 굴삭 반경 자세보다 최대 굴삭력 자세에서 큰 굴삭 하중과 높은 응력 수준을 나타 낸다. 자세와 대칭성이 같은 조건 이라도 암 실린 더 구동보다 버킷 실린더를 구동하는 경우 큰 굴 삭 하중과 높은 응력 수준을 나타낸다. 그리고 자 세와 구동 실린더가 같은 조건이라도 대칭 굴삭보 다 비대칭 굴삭의 경우에 높은 응력 수준을 나타
냄을 알 수 있다. 또한 모든 시나리오에 대하여 본체에서의 응력은 작업장치에 비해 매우 낮은 수 준으로 계측되었다.
4. 동적 계측
4.1 계측 항목 및 계측 지점
유압 실린더의 압력 및 변위, 작업장치의 응력 및 가속도를 계측하였다. 동적 응력은 정적 응력 계측을 위하여 설치하였던 게이지 중에서 작업장 치에 설치된 게이지를 사용하였다. 가속도 계측을 위하여 2 개의 3 축 가속도계를 암의 상판과 카운 터 웨이트(Counter-weight) 중심에 각각 설치하였다.
압력 계측을 위하여 붐, 암 및 버킷 실린더의 대 실, 소실 및 쿠션 포트에 압력계를 각각 설치하였 다. 작업 자세(위치)에 따른 응력, 압력 그리고 가 속도 등의 응답을 분석하기 위하여 3 개의 변위계 를 붐 실린더, 암 실린더 및 버킷 실린더에 각각 설치하였다. Fig. 6 은 암 실린더의 압력과 변위를 측정하기 위해 압력계와 변위계를 부착한 모습이 다.
4.2 단독 동작 계측 결과
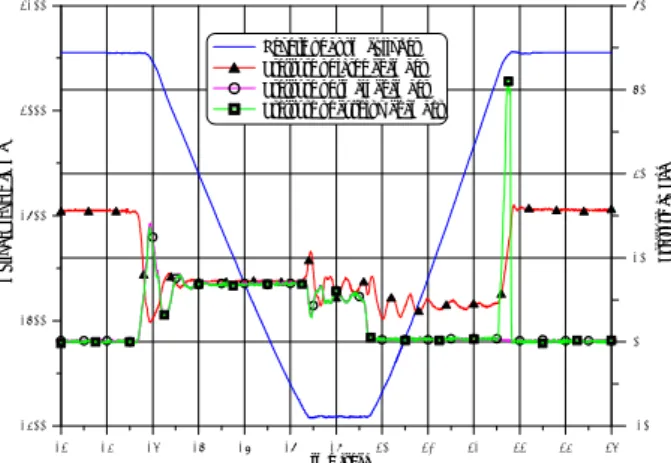
Fig. 7 은 암과 버킷을 완전히 접은 상태로 붐 실린더를 단독 동작할 때 계측되어진 붐 실린더의 변위 및 압력을 나타낸다. 붐 실린더의 설계 속도 는 확장 및 수축시 각각 300 ㎜/sec, 650 ㎜/sec 으로 서 수축 속도가 약 2 배정도이며 계측 속도는 수 축시 198 ㎜/sec, 확장시 227 ㎜/sec 로서 계측 속도 는 설계 속도에 미달하고 있다. 계측된 수축 속도 가 설계 수축 속도보다 현저히 작은 이유는 붐 실 린더가 수축할 경우에는 지면과의 충돌을 우려하 여 최대 속도로 수축하지 못했기 때문이다. 붐의 확장/수축에 따른 붐 실린더 내부의 압력 변화를 살펴보면, 대실의 압력은 붐이 확장 상태로 있는 구간에서 약 31.5 MPa 정도로서 설계 압력(약 32.3
Fig. 6 Measurement of displacement and pressure for an arm cylinder
MPa)과 큰 차이를 보이지 않는다. 쿠션 압력과 소 실 압력은 동일한 거동을 보이다가 쿠션력이 작용 하는 순간부터 약 63 MPa 정도의 최고 압력이 발 생하며 쿠션 시간(cushion time)은 0.29 sec 로서 설 계 쿠션 시간(0.3 sec)과 거의 일치하였다.
Fig. 8 은 붐이 수축한 상태에서 완전 확장하여 쿠션이 일어난 후 붐이 자유 진동 할 때, 암에서 계측된 가속도 성분을 FFT 분석 결과와 같이 나타 내고 있다. 여기에서 x 방향은 암의 상판과 평행 한 방향, y 방향은 선회 방향, z 방향은 암의 상판과 직교하는 방향이다. x 방향 가속도 성분을 분석하 여 보면 0.39 Hz, 2.34 Hz, 3.43 Hz 의 순서로, y 방향 가속도 성분을 분석하여 보면 명확하게 구별되지 는 않으나 1.56 Hz, 2.34 Hz, 3.91 Hz 의 순으로 주파 수가 나타나고 있다. z 방향 가속도 성분을 분석하 여 보면 1.95 Hz 만이 명확하게 나타나고 있다. 따 라서 작업 장치는 가속도계의 z 방향(굴삭 모드)으 로 1.95 Hz 의 1 차 모드, x-y 평면(선회 모드)상에서 2.34 Hz 의 2 차 모드로 진동하고 있음을 보여주고 있다. 좀더 정확한 가속도 분석을 위하여 동일한 자세에 대하여 소형 고무 망치(Impact hammer)를 이용한 모드 시험(Modal test)을 실시한 결과, 선회 방향으로 7.0 Hz 의 1 차 모드, 굴삭 방향으로 10.3 Hz 의 2 차 모드가 계측되었다. 동일한 자세를 가 지는 동일한 굴삭기에 대하여 서로 다른 진동 모 드 및 진동수를 나타내는 원인은 붐 실린더의 작 동유를 가진시킬 만큼의 하중이 작용하는 경우, 작동유의 압축성으로 인하여 저주파수가 나타나는 것으로 추정할 수 있다(2,3). 즉 일반적인 모드 시험 에서는 작은 가진 후 가속도를 계측하기 때문에 강구조물 자체의 고주파수만 검출되는 것으로 추 정된다.
카운터 웨이트에 부착된 가속도계의 가속도 성 분을 분석한 결과 주로 5.0 Hz 이상의 고주파를 나타냈으므로 엔진 기계류에서 발생한 진동이 작
23 24 25 26 27 28 29 30 31 32 33 34 35
Time [sec]
2400 2600 2800 3000 3200
Cylinder length [mm]
-20 0 20 40 60 80
Pressure [MPa]
Length of boom cylinder Pressure of large chamber Pressure of small chamber Pressure of cushion chamber
Fig. 7 Displacement and pressures of a boom cylinder
22 22.5 23 23.5 24 24.5 Time [sec]
0 2 4 6 8
Frequency [Hz] 10
-0.8 -0.4 0 0.4 0.8
Acceleration [g]
0 100000 200000 300000 400000
PSD [Hz -1]
(a) x direction
22 22.5 23 23.5 24 24.5
Time [sec]
0 2 4 6 8
Frequency [Hz] 10
-0.8 -0.4 0 0.4 0.8
Acceleration [g]
0 40000 80000 120000 160000
PSD [Hz -1]
(b) y direction
22 22.5 23 23.5 24 24.
Time [sec] 5
0 2 4 6 8
Frequency [Hz] 10
-1.2 -0.8 -0.4 0 0.4 0.8 1.2 1.6
Acceleration [g]
0 4000000 8000000 12000000 16000000
PSD [Hz -1]
(c) z direction
Fig. 8 FFT of acceleration at arm
업장치를 가진시키는 영향은 매우 적을 것으로 예 측되며 작업 장치에서 검출된 진동수는 작업 장치 장치만의 고유 진동수를 나타내는 것으로 예측된 다.
4.3 연속 굴삭 작업 계측 결과
최대 굴삭 반경 자세, 최대 굴삭력 자세 및 최 대 굴삭 깊이 자세의 3 가지 자세에 대하여 굴삭, 인양, 선회, 상차로 구성되는 연속 굴삭 작업을 계 측하였다. Fig. 9 는 연속 굴삭 작업시의 붐 실린더 및 버킷 실린더 변위를 나타내고 있다.
Fig. 10 은 Fig. 9 와 동일한 시간대에서 계측된 동적 응력 변화를 나타낸다. 굴삭하는 자세에서
0 10 20 30 40 50 60 70 80 9
Time [sec] 0
-100 0 100 200 300 400 500
Displacement [mm]
Displacement of boom cylinder Displacement of bucket cylinder
boom up start boom up end boom down startboom down end digging at max. radius boom up start
swing boom up end boom down start
dump
swing swing boom down end boom up start
digging at max. digging force boom up end boom down startdump
swing swing boom down end boom up start
digging at max. depth boom up end boom down start
dump
swing swing boom down end
Fig. 9 Displacement of boom & bucket cylinder at the continuous digging motion
높은 응력이 발생하며 특히 최대 굴삭력 자세로 굴삭하는 순간에 최대의 응력이 계측되었다.
Fig. 11 은 Fig. 10 에서 최대 굴삭력 자세로 굴 삭할 때의 응력 상태 및 각 실린더의 변위 상태를 확대하여 나타내고 있다. 굴삭 시작 전후를 비롯 하여 실질적으로 굴삭이 이루어지는 시간 동안에 도 동적인 응력 상태는 거의 없음을 볼 수 있다.
0 20 40 No.1 - No.3 60 80
T
100 ime [sec]
No.4 - No.6 No.7 - No.9 No.10 - No.12 No.13 - No.15
-40 0 40 80 120
Stress [MPa]
-80 -40 0 40 80 120
Stress [MPa]
-80 -40 0 40 80 120
Stress [MPa]
-80 -40 0 40 80 120
Stress [MPa]
-40 0 40 80 120
Stress [MPa]
Fig. 10 Dynamic stress comparison during the conti- nuous digging motion
35 36 37 38 39 40 41 42 43
Time [sec]
-10 0 10 20 30 40 50 60 70 80 90 100 110 120
Stress [MPa]
0 50 100 150 200 250 300 350 400
Displacement [mm]
Stress at Ch. 1 Stress at Ch. 2 Stress at Ch. 3 Displacement of boom cylinder Displacement of arm cylinder Displacement of bucket cylinder
Fig. 11 Dynamic stresses at the motion of digging
5. 결 론
본 연구에서는 실제 굴삭기의 정적/동적 응력 및 유압 실린더의 압력, 작업장치의 변위 및 가속 도 등을 계측하고 이를 분석함으로써 아래와 같은 굴삭기의 응력 특성 및 구동 특성을 파악하였다.
(1) 정적 계측 결과를 분석한 결과, 전반적으로 최대 굴삭 반경 자세보다 최대 굴삭력 자세에서, 암 실린더보다 버킷 실린더 구동시에, 대칭 굴삭 보다는 비대칭 굴삭에서 더 높은 응력 및 굴삭력 이 계측되었다. 본체에서의 응력은 모든 자세에서 작업장치에 비해 낮은 수준으로 계측되었다.
(2) 단독 동작에 대한 계측 결과를 분석한 결과, 유압 실린더의 속도 및 압력에 대한 성능을 파악 할 수 있었다. 또한 주파수 분석을 통하여 실린더 작동유의 압축 강성이 작업장치의 고유 진동수 및 고유 진동 모드를 결정하는 주요 인자임을 확인하 였다. 엔진 등의 기기류는 작업 장치의 고유 진동 수에 영향을 미치지 않는 것으로 판단된다.
(3) 연속 굴삭 동작에 대한 계측 결과를 분석한 결과, 최대 굴삭력 자세에서 가장 높은 수준의 응 력이 작업 장치에서 발생하였으며, 굴삭 동작 중 의 응력 상태는 거의 정적인 상태로 파악되었다.
(4) 본 계측 결과는 향후 기구동역학해석 및 구 조강도해석에 기반한 설계/해석 기법의 정립에 유 용한 자료로 활용 가능하다.
참고문헌
(1) “Hydraulic excavator and backhoe digging forces”, 1996, Society of Automotive Engineers, SAE J179 (2) Kim, D.Y., 1989, Hydraulic Technical Handbook,
DaeGwang, pp.55-83
(3) Lee, J.S., 2000, Hydraulic Control System, BoMun- Dang, pp.43-85
![Table 2 Cylinder pressures and digging forces from static measurement Load Case Bucket cylinderPressure [MPa] Arm cylinder Pressure [MPa] Digging Force [ton] SLC1 30.9 0.3 11.0 SLC2 23.3 31.1 9.1 SLC3 30.5 0.1 10.7 SLC4 23.5 31.2 9.1 SLC5 23](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5221968.356769/3.892.85.426.873.1130/cylinder-pressures-digging-measurement-cylinderpressure-cylinder-pressure-digging.webp)