일정속도 매크로 모델 Strip-off CDR 속도분석법의 개발
최윤경1)* · 신창수2)· 이성철3)
Development of the Strip-off CDR Velocity Analysis for a Constant Velocity Macro-model
Yun Gyeong Choi*, Changsoo Shin and Sungchul Lee
(Received 9 November 2013; Final version Received 27 January 2014; Accepted 10 April 2014)
Abstract : The velocity analysis method with CDR(Controlled Directional Reception) ray-tracing are developed.
With the local slant stack method traveltimes and ray-parameters are autopicked. We have developed a method for selecting velocities and boundaries of the constant velocity macro-model using CDR ray-tracing. We have applied the CDR ray-tracing with velocity scanning. The focusing conditions of the end points of two rays are used to determine the velocity of the block. With selected velocity, we choose interactively the boundary points within the selected upper and lower limits. We have obtained the slopes of the boundary simultaneously, which are used to calculate the angles of rays of the next block with Snell’s law. In this way, we can determine the velocities and layer boundaries of all blocks step by step successively. In this study, we have applied this strip-off CDR velocity analysis for constant velocity macro-model to a two-dimensional synthetic data.
Key words : CDR(Controlled Directional Reception) ray-tracing, Velocity analysis, Constant velocity Macro-model, Local slant stack, Velocity scanning
요 약 : CDR(Controlled Directional Reception) 파선추적을 사용하는 속도분석법을 개발하였다. 국소 경사 겹쌓 기(local slant stack)을 적용하여 탄성파의 주시와 파선 매개변수를 자동추출할 수 있도록 프로그램을 구현하였고 일정속도 매크로모델에 CDR 파선추적을 수행하여 블록의 속도와 경계를 결정하는 방법을 개발하였다. 빠른 파선추적 계산속도로 인해 속도 훓기(velocity scanning) CDR 파선추적을 수행할 수 있었고, 두 파선의 종착점이 가장 잘 근접하는 속도를 그 블록의 최적속도로 결정하였다. 결정된 블록의 최적속도로 CDR 파선추적을 수행한 후 선택된 상한-하한 심도범위 내의 경계점의 위치를 결정하였다. 동시에 경계점에서의 경사각을 구하여 다음 블록의 파선의 방향 설정시 스넬의 법칙을 사용할 수 있도록 하였다. 이와 같은 방법을 각 블록에 순차적으로 적용하면 모든 블록의 속도와 경계면을 결정할 수 있다. 본 연구에서 개발한 일정속도 매크로 모델 strip-off CDR 속도분석법을 합성 탄성파자료에 적용해서 좋은 결과를 얻을 수 있었다.
주요어 : CDR(Controlled Directional Reception) 파선추적, 속도분석, 일정속도 매크로모델, 국소 경사 겹쌓기, 속도 훓기
1) 서울대학교 에너지시스템공학부 2) 서울대학교 에너지자원공학과 3) 강릉원주대학교 물리학과
*Corresponding Author(최윤경) E-mail; [email protected]
Address; Department of energy systems engineering, College of engineering, Seoul National University, Seoul, Korea
ISSN 2288-2790(online) Vol. 51, No. 2 (2014) pp. 178-192, http://dx.doi.org/10.12972/ksmer.2014.51.2.178
서 론
탄성파 탐사 자료를 지하구조로 영상화하기 위해 NMO (Normal Moveout), DMO(Dip Moveout), 겹쌓기전 참 반사보정(Prestack migration) 등의 자료처리 과정에서
속도분석이 필수적이다. 일반적으로 NMO를 이용한 속 도분석법(Dix, 1955)이 가장 많이 사용되는데, 층서가 수평하다는 1차원적인 가정이 필요하며, 어느 정도의 층 서 구조에서는 적용이 가능하지만, 복잡한 지형의 경우 에는 적용이 불가능하다. 국내의 속도분석에 관한 연구 는 주로 NMO의 닮음(semblance)을 이용한 방법을 사용 하고 있으며(Ji and Choi, 2010; Cheong et al., 2013), 최근에는 이를 이방성 매질에 적용한 연구가 수행되었다 (Kwon et al., 2013). NMO의 수평층서 가정을 보완하는 DMO는 경사층에 대해서는 속도 분석이 가능하지만, 수 평적인 속도변화를 고려할 수 없다. 두 방법에 비해 겹쌓 기전 참반사보정에 사용되는 속도분석법은 경사와 수평 연구논문
적인 속도변화를 모두 고려할 수 있고, 속도 오차에 매우 민감하다는 점 때문에 강력한 속도분석법이라 말할 수 있 다(Liu, 1995). 참반사보정 속도 분석(Migration velocity analysis; MVA)는 크게 Residual-curvature analysis(RCA) 와 Depth focusing analysis(DFS)로 나눌 수 있다. 이 중 RCA는 겹쌓기전 자료에서 속도가 맞게 참반사보정이 되면 벌림(offset)에 따라 심도의 변화가 없는 수평선을 이룬다는 점을 이용하여, 여러 속도에 대해 참반사보정 을 수행하여 동일 영상점 모음(common image gather;
CIG)에서 벌림에 따른 심도의 변화, 즉 잔여 무브아웃 (Residual-Moveout; RMO)이 “0”이 되는 속도를 그 블록 의 속도로 결정하는 방법이다(Al-Yahya, 1989; Deregowski, 1990; Lafond and Levander, 1993; Liu and Bleistein, 1995; Liu, 1995). 이러한 참반사보정 속도분석법의 목 표는 속도의 변화를 RMO로 표현하는 것이며, 참반사보 정, 분석, 속도변화의 과정을 반복적으로 수행한다. DFA 는 속도 분석을 위해 겹쌓기 파워(stacking power)를 이 용하는 방법으로 참반사보정 속도가 맞는 경우, 영시간 (zero time; =0), 영벌림(zero offset)에서 근접(focusing) 된 이미지를 형성하게 된다(Doherty and Claerbout, 1976;
Yilmaz and Chambers, 1984; Faye and Jeannot, 1986;
MacKay and Abma, 1992; 1993).
CDR(Controlled Directional Reception)법은 주어진 송신원에서 발생되어 수진기로 관측되는 탄성파의 왕복 주시와 파선 매개변수(ray parameters)를 결정하는 방법 중 하나이다. 이 방법의 개념은 미국에서 Rieber(1936) 가 제안한 탄성파의 directional selection의 원리에서 시 작되었으나, 모스코바의 Gubkin 석유 및 가스 개발 연구 소에서 L.A. Riabinkin에 의해 CDR이라 명명되어지며, 심화 발전되었고(Riabinkin et al., 1962), 이 후 Sword는 CDR에 의한 속도분석법을 서방 세계에 소개하였다 (Sword, 1984; Zavalishin, 1982). Sword가 제안한 CDR 에 의한 속도분석법은 공통 송신점 모음 및 공통 수신점 모음 자료에 대해 국소 경사 겹쌓기(local slant stack)을 수행하여 자동추출(autopicking)된 반사 이벤트의 파선 매개변수를 계산하여, 이벤트에 해당하는 시간 동안 동 일 심도의 조건으로 파선추적을 시킨 후 종착점의 수평 거리 차이를 비용 함수(cost function)로 하여 반복적으 로 속도를 update하여 적합한 속도를 결정하는 방법이다 (Sword, 1984; 1986; 1987). 그러나 비용 함수가 속도에 비선형적으로 의존하기 때문에 항상 안정적으로 수렴하 기 어려운 문제가 있다. 이를 보완하기 위해 Biondi(1990;
1992)는 추출(picking)을 하지 않고 자동으로 속도를 결 정하는 방법을 도입하였고, Billette와 Lambaré(1998)는 속도 뿐 아니라 반사점의 위치, 파선의 방향 등도 비용
함수의 변수로 적용하여 불안정성을 제거하려 하였으나, 비용과 시간이 많이 들 뿐 아니라, 속도 모델의 경계면을 명확하게 구하기 어렵다는 단점이 있다. 본 연구에서는 느린 계산 속도와 명확하지 않은 경계면의 문제점을 해 결하기 위하여, 일정속도 매크로 모델을 사용한 strip-off 방식의 CDR 속도분석법을 개발하여 합성 자료에 적용 하였다.
이론: Modeling Equation and Imaging Equation of CSG and CRG Data
매질 속을 이동하는 파동을 파선으로 생각하고 매질의 각 지점에서의 파동의 속도가 주어지는 경우, 시간 =0 에서 송신원을 출발한 파동이 수신점에 도착할 때의 주 시 를 계산할 수 있다. 반사면 등에서 반사되지 않고 직 접 파동이 도달한 경우, 송신원과 수신점 사이의 가능한 경로에 대해 주어진 매질의 파동속도로부터 총 경과시간 (주시)을 계산하여 이 중 최소주시가 수신점에서의 관측 시간이 된다. 만일 매질에서의 파동속도가 일정하다면 최단주시가 되는 경로는 두 점을 잇는 직선이 되고, 주시 는 이 거리를 매질에서의 파동속도로 나눈 값이 된다. 반 사면에 반사된 경우도 Fermat의 원리에 의해 주시를 쉽 게 계산할 수 있다. 이 경우 왕복주시 는 송신원 에서 반사점까지의 경과시간 와 반사점에서 수신점 까지 의 경과시간 를 합한 시간이 되는데 이를 식으로 나타 내면(송, 수신점의 심도가 0인 경우),
(1)
로 나타낼 수 있다. 여기서 는 반사면상 위의 반사가 일어나는 반사점으로, 이 점이 결정되어야 위 식 으로부터 주시 를 구할 수 있다. 이 반사점은 Fermat의 원리 즉 최소경과시간의 조건으로부터 다음의 식으로 결 정된다.
∇ ⋅ (2)
송신원과 수신점이 정해져 있는 경우 두 점사이의 경 로는 오직 반사점에 의해서만 정해지게 되므로 반사점의 변화 가 바로 경로변화를 나타내는데, 위 식의 의미 는 바로 경로변화에 대해 총시간변화가 “0”, 즉 최소시 간 경로의 조건이 된다. 위의 두 식을 사용하면 주어진 반사면에 대해서 반사점을 구할 수 있고, 수신점에서의 주시도 계산할 수 있기 때문에 모델링 방정식(Modeling
equation)이라고 부른다.
위의 경우와 달리 여러 송신원과 여러 수신점의 주시 자료가 주어진다면 위의 두 식을 조금 변형하여 반사점 을 구할 수도 있다. 먼저 공통 송신점 모음(common-shot gather; CSG) 경우를 생각해보자. 우리는 CSG 자료로부 터 특정한 반사면에 반사되어 측정된 주시가 수신점의 위치에 따라 어떻게 변하는지, 즉 주시 의 수 신점의 위치에 대해 변화율
을 구할 수 있다. 이 변
화율을 이용하기 위해서는 식 (1)을 로 미분한 식이 필요한데, 수신점이 변하면 반사면상의 반사점의 위치도 따라서 변하기 때문에, 실제 식 (1)을 수신점의 위치 로 미분하면 반사점의 변화에 의한 미분효과도 포함하여 야 하며, 아래와 같이 된다.
∇⋅
∇⋅
(3)
위 식에 식 (2)를 대입하면 다음과 같다.
(4a)
같은 방법으로 공통 수신점 모음(common-receiver gather;
CRG) 자료로부터 송신원의 위치변화에 따른 주시변화 를 구한다면 이 값은
(4b)
이 되며, 이 두 식은 공통 송신점 모음(또는 공통 수신점 모음)의 주시 의 수신점(혹은 송신원)의 위치변화에 따 른 변화율이 파선이 실제 반사되는 반사점의 변화에 상 관없이 오직 수신점(혹은 송신원)의 변화(파선의 변화를 의미)에 따른 시간변화에만 의존한다는 것을 나타내고 있다. 즉 CSG의 경우 파선이 송신원으로부터 반사점에 도달하는 과정은 고려할 필요가 없고, CRG의 경우는 파 선이 반사점으로부터 수신점에 도달하는 과정은 고려할 필요 없이, 각각 반사점으로부터 수신점까지의 파선, 송 신원으로 부터 반사점까지의 파선변화에 따른 시간변화 가 어떻게 변하는지를 고려하면 된다. 그런데 송신원에서
반사점까지의 파선은 바로 파선 매개변수 값 sin
가 되기 때문에 매질의 속도 가 주어진다면 파선의 방 향을 결정할 수 있게 된다. 즉 주시 와 CSG와 CRG에 서의 주시 의 공간미분이 주어지면 송신원과 수신점으 로부터의 파선의 방향을 알 수 있고, 식 (1)로부터 이 두 파선이 진행하는 시간의 합이 주어지면 파선의 반사점을 구할 수 있게 된다. 즉 식 (1)과 식 (4)을 이용하면 송신 원과 수신점 사이의 주시와 주시의 공간미분 값으로부터 반사점을 구할 수 있다. Liu는 이 두 식을 이미징 방정식 (Imaging equation)이라고 불렀으며(Liu, 1995), CDR을 이용한 속도분석이나 참반사보정법의 이론적 핵심이 된다.
일정속도 매크로모델 Stripe-off CDR 속도분석법
첫 번째 단계 : 국소 경사 겹쌓기 과정
매질의 속도를 일정하다고 간주한다면, 다섯 가지 매개변수로 CDR을 이용하여 매질의 속도를 결정할 수 있다(Sword, 1987). 파선 매개변수 혹은
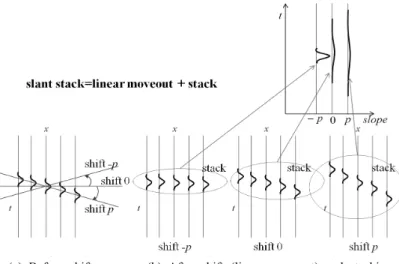
를 구하기 위해서는, 공통 송신점 자료 혹은 공통 수 신점 자료에서 국소 경사 겹쌓기를 수행하여 주시 의 공간변화율로부터 혹은 를 결정한다. 경사 겹쌓기 를 간단하게 정의하면 “linear moveout+stack”이라고 말 할 수 있다(Fig. 1).
전역 경사 겹쌓기(global slant stack)가 전체 트레이스 에 대해 적용되는 것에 비해, 국소 경사 겹쌓기는 Fig.
1에서 도시하는 것과 같이 중심 트레이스 에서 반사 이벤트의 또는 를 구하기 위하여 중심 트레이스 주 변의 몇 개의 트레이스만을 사용하며, 트레이스 간의 단면에서 이벤트의 경사는 식 (4a) 또는 (4b)에 의해 파선 매개변수와 연결된다. 본 연구에서는 SU(Seismic Unix) 에서 제공하는 전역 경사 겹쌓기 프로그램을 국소 경사 겹쌓기에 맞게 변형하여 사용하였다. 공통 송신점 자료 는 수신점의 변화율만을 포함하므로 를, 공통 수신점 자료는 송신점의 변화율만을 포함하므로 를 제공한다.
변화율을 구하는 데 있어서 사용되는 트레이스들에 거리 에 따른 해밍(Hamming) 함수를 사용하였는데, 중심 트 레이스는 가중치가 “1”이 되고, 거리가 멀어질수록 “0”
에 가깝게 되도록 구성하였다.
cos (5)
(a) Before shift (b) After shift (linear moveout) and stacking Fig. 1. Concept of local slant stack.
Fig. 2. Linear moveout and stacking of local traces. All traces except reference one are shifted by the time-delay depending on ray parameter. For stacking at the same time along traces, the amplitude of the other traces at the nearest two time-steps, tr[itref+id] and tr[itref+id+1] are interpolated to time step of the reference one.
여기서,
∆, 이때
그리고 ∆는 트레이스간의 거리이다. 식 (5)의 는 국소 경사 겹쌓기를 위한 트레이스의 개수인데, 이를 결 정하는 문제도 고려해야 할 부분이다. 본 연구에서는
로 하였는데, 이는 중심 트레이스 좌우에 각각 세 개의 트레이스를 사용하여 공간미분을 구하는 방식이 된 다. 중심 트레이스는 에서 시작되며, 가 장자리 트레이스들은 계산에 필요한 주변 트레이스가 모 자라기 때문에 국소 경사 겹쌓기 계산에서 제외된다. 선 택된 중심 트레이스 좌우의 주변 트레이스에 대해 혹 은 만큼 이동시키기 위해서, 식 (6)과 같이 주변 트레 이스에서 경사도의 음수값과 중심 트레이스와 주변 트레
이스의 송신원(CRG 경우) 혹은 수신점(CSG 경우)의 위 치차이를 곱하여 지연시간(delayed time) ∆를 적용하 였다.
∆ ∆ (6)
여기서, 또는 그리고 또는 이다.
앞에서 기술한 시간지연, 즉 선형이동(linear moveout)을 수행한 후, 겹쌓기(stacking)를 하기 위하여 국소 트레이 스 간의 시간 간격을 맞추어야 한다. 시간 지연된 트레이 스의 시간 간격이 중심 트레이스의 시간 간격과 일치하지 않을 때, 중심 트레이스의 시간 간격과 가장 가까운 두 점 와 을 내삽(interpolation)
Fig. 3. It shows how find maxima ray parameters in local slant stack panel. At first, sum over for every time step, and find the maximum amplitude of sum over along time. And pick all starting times of local maxima within threshold (percentage) of maximum amplitude, having ending times with half amplitude of starting times of local maxima and duration time step “it_len”.
하여 중심 트레이스의 시간 간격을 일치시킨 후 겹쌓기 를 수행하였다(Fig. 2). 이 때 국소 경사 겹쌓기 값의 제 곱을 취함으로(squared sum of local slant stack over ) 부호에 상관없이 의 최대값을 찾도록 하였다.
×
(7) 여기서, 는 트레이스의 진폭이며, 는 파선 매개변수,는 기준 트레이스의 위치, 와 나머지 변수들은 식 (5)와 같다.
일반적으로 공통 송신점 모음의 자료에 비해 공통 수 신점 모음의 자료의 수가 적은 경우가 많다. 이 문제를 해결하기 위해, 상반성 원리(principle of reciprocity)를 이용하여 공통 송신점 모음을 공통 수신점 모음으로 바 꾸어 계산하기도 한다(Sword, 1984), 그러나 이 방법은 양측전개 취득자료(split-spread recording scheme)에서 만 적용이 가능하며, 전환 파동(converted waves)까지 확장하여 사용할 수 없다는 단점이 있다. 본 연구에서는 공통 수신점 모음을 그대로 사용하면서, 상대적으로 듬 성듬성한 공통 수신점 모음의 국소 경사 겹쌓기 계산을 위한 파선 매개변수의 간격 ∆를 공통 수신점의 ∆보 다 좁게, 즉 파선 매개변수 계산을 촘촘하게 함으로써 이 를 해결하고자 하였다.
두 번째 단계 : 국소 경사 겹쌓기 자료에서 최대 파선 매개변수 결정 과정
첫 번째 단계에서는 공통 송신점 모음 자료와 공통 수 신점 자료의 모든 트레이스에 대해, 국소 경사 겹쌓기된 각 트레이스의 5개의 매개변수(송,수신 위치, 시간, 파선 매개변수 또는 , squared sum of local slant stack over )를 저장하였다. 이 저장된 파일을 이용하여 각 트 레이스의 영역에서 극대가 되는 파선 매개변수를 자동추출하는 것이 두 번째 단계이다.
파선 매개변수를 자동추출하기 위해서 먼저 기준값을 정해야 한다. 이 값은 사용자가 자료의 특성에 따라 결정 해야 하는 값이다. 이를 위해 먼저 영역에서 전체 최대값(max_amp)을 구한다. 한 이벤트의 파선 매개변수 는 같은 시간일 때 선형성을 보이기 때문에, 2차원 영역
에서 최대값을 구하기 위해 축으로 합한 값인 sum_over_p() 중 축의 최대를 1차원적으로 구한 후, 그 시간에서 축의 1차원적 최대를 구하여도 무방하다
(Fig. 3). 반사 이벤트에 의한 파선 매개변수는 영역 에서 극대를 이루며, 이를 찾기 위해서 영역의 전체 최대값을 기준으로 사용자가 최소 기준값(threshold)을 지정한다. 1차적으로 sum_over_p() 트레이스에서 축 을 따라 최소 기준값보다 큰 시간을 이벤트가 시작되는 점으로 인식하며, 이 점을 자동추출되는 이벤트의 시작 시간으로 정한다. 본 연구에서 도시한 자료의 경우에는 최소 기준값이 전체 최대값의 2% 이상인 점으로 하였다.
이는 전체 최대값의 2% 이상이 되는 값은 모두 이벤트 의 시작점으로 본다는 뜻이다. 이벤트가 끝나는 점은 자 동추출된 시작점의 sum_over_p()값의 1/2이 되는 시간 으로 간주한다(circle in Fig. 3). 송신 파형이 여러 개의 위글로 이루어지는 경우가 많기 때문에, 하나의 이벤트 가 여러 개로 추출될 가능성이 있다. 이를 위해 it_len(파 형의 길이)을 도입하였으며(circle in Fig. 3), 이벤트의 시작점에서부터 ∆ ×it_len 시간만큼은 최대점을 찾지 않도록 하였다. 앞에서 기술한 합성 자료의 송신 파형의 길이가 약 0.2 초이고 ∆=0.001 초이기 때문에 it_len
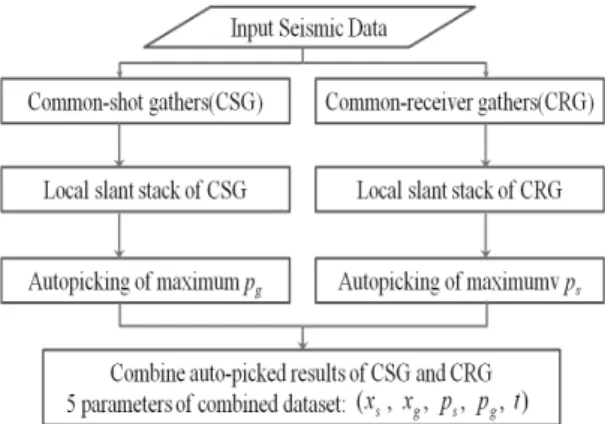
Fig. 4. Flowchart of getting 5 parameters from autopicking of CSG and CRG data.
=200으로 하였다.
일단 이벤트가 존재하는 시간구간이 정해지면, 그 구 간 내에서 이벤트가 최대(local maximum)가 되는 시간
를 결정한 후, 그 시간에서 축의 최대값을 찾는다. 축 이 조밀한데 비해 축은 상대적으로 조밀하지 않으며,
의 분포는 일반적으로 가우시안 형태를 이루므로, 의 분포를 포물선으로 가정하고, Gauss-Jordan법을 사용하 여 포물선의 꼭지점의 위치를 구함으로 국소 최대를 찾 았다.
세 번째 단계 : 자동추출된 CSG 이벤트와 CRG 이벤 트 결합 과정
두 번째 단계에서는 와 혹은 로 4개의 매개변수만을 구할 수 있었다. 속도분석에 필요한 5개의 매개변수를 구하기 위해서는, 각 트레이스의 각 이벤트 의 와 를 결합하여야 한다. 그러므로 이번 단계는 공통 송신점 모음에서 구한 와 공통 수신점 모음에서 구한 가 동일한 이벤트인 경우를 결합하기 위한 단계 이다. 같은 이벤트는 동일한 송수신점에서 같은 시간에 존재하므로, 의 세 변수를 비교하여 결합하였다.
먼저 두 모음 자료의 자동추출 결과 중 가 동일 한 트레이스를 찾고, 이 중 같은 시간의 이벤트는 결합한 다. 같은 시간이란 일정 간격의 시간을 의미하며, 그 한 계 내에 들어오는 이벤트는 같은 이벤트로 간주하였다.
이와 같은 과정을 거치면 자동추출된 모든 이벤트는 4개 의 변수에서 5개 변수 를 갖게 된다. 지금 까지의 과정을 정리하여 도시하였다(Fig. 4). 속도 분석 을 위한 자료를 CSG모음과 CRG모음으로 각각 정리하 여, 국소 경사 겹쌓기를 수행하고, 거기에서 최대가 되는
파선 매개변수를 자동추출한 후, 두 추출 자료를 결합하 여, 최종적으로 5개의 매개변수를 구한다.
네 번째 단계 : 속도 훓기를 이용한 속도와 경계면 결 정 과정
지하 구조를 여러 개의 블록으로 분리한 후 각 블록의 속도를 일정하다고 가정하면(일정속도 매크로 모델), 앞 에서 자동추출된 주시와 두 파선 매개변수로부터 간단히 기하학적인 선분계산만으로 CDR 파선추적을 수행할 수 있다. 이와 같은 빠른 파선추적 계산시간으로 인해 일정 간격의 많은 속도에 대해서 CDR 파선추적을 수행할 수 있기 때문에 어떤 속도에 대해 두 파선의 종착점이 한 점으로 가장 잘 근접하는지를 판단한다면 그 블록의 최 적속도를 어렵지 않게 결정할 수 있다. 이 때 두 가지 경 우로 근접조건을 생각할 수 있는데, 먼저 두 파선의 종착 점의 심도가 같다고 가정하고 이 심도까지의 주행시간을 합한 값이 자동추출된 주시와 같다는 조건을 적용하면 각 파선의 종착점의 심도와 수평위치를 결정할 수 있다.
이 경우 근접조건은 두 파선의 종착점의 수평위치의 차 이의 절대값이 된다. 두 번째로 두 파선이 교차하는 점을 구한 후 이 점까지의 두 파선의 주행시간을 구하여 합한 값과 추출된 주시와 차이의 절대값을 근접조건으로 사용 하였다. 실제 속도분석 과정에서는 두 근접조건을 다 계 산하여 그림으로 나타낸 후, 이 중 첫 번째 근접조건을 만족하는 종착점들의 개수가 최대인 속도를 해당 블록의 속도로 결정하였으며, 시간에 대한 근접조건은 보조적인 확인과정으로만 사용하였다.
이와 같이 블록의 속도가 결정되면 해당 속도로 CDR 파선추적을 수행하였을 때 근접된 점들로부터 블록의 경 계를 결정할 수 있다. 실제로는 추출 오차로 인해 실제 블록 경계 이외에 전 블록이나 다음 블록의 점들도 일부 포함될 수 있기 때문에 수평위치에 따른 경계점의 상한- 하한 심도를 설정할 수 있도록 하여 명확한 경계점을 결 정하도록 하였다. 이 때 경계점의 위치뿐 아니라 두 파선 의 파선 매개변수로부터 경계면 상의 반사각을 동시에 구하였다. 이 반사각으로부터 파선이 반사된 경계면의 경사각을 구하면, 스넬의 법칙으로부터 파선이 현 블록 과 다음 블록의 경계를 지나갈 때의 굴절각을 구할 수 있다.
현 블록의 경계가 설정되면 다음 블록의 속도분석을 위하여 근접되지 않은 파선들과 현 블록의 경계와의 교 점을 구하였다. 실제 블록의 경계는 선이 아니라 두 파선 이 근접된 종착점(focusing endpoints)들로 구성되어 있 기 때문에 먼저 다음 블록으로 진행하는 파선과 가장 가 까운 두 경계점을 구한 후 이 두 점을 잇는 직선과 파선
Fig. 5. Flowchart of iterative strip-off velocity analysis using CDR ray-tracing.
Table 1. Description of synthetic modeling parameters no. of total traces 80,400
no. of shots 201
shot spacing 50 m
no. of receivers 400
receiver spacing 10 m
min. offset -10 m
max. offset -4,000 m
sampling interval 1 ms
record length 6 sec
total memory 1.95 Gbytes
과의 교점을 구하였으며, 이 때 교점 뿐 아니라 교점에서 의 경계면 경사도 구하였는데, 가까운 두 경계점과 교점 간의 거리의 비에 따라 두 경계점의 경사를 내삽하여 파 선이 지나가는 교점의 경사를 구하였다. 이 교점들을 다 음 블록의 파선의 시작점으로 설정하면 반복적인 방법으 로 한 블록씩 지금까지의 과정을 적용하여 순차적으로 (strip-off) 모든 블록에서의 속도와 경계면을 결정할 수 있다. 이와 같이 반복적인 방법을 적용하기 위해 5개의 파라메타 외에 각 파선 시작 심도값( ), 두 파선이 경계면과 교차하는 점의 경사값( ), 파선의 전 블록 속도( )로 최소 11개의 파라메타가 필요하다. 실제 프로그램에서는 경계면에서의 굴절계산이 잘 수행되는 확인하기 위해 이전 블록에서의 두 파선의 시작위치 ( )도 파라미터로 사용하여 총 15개의 파 라메타를 사용하였다.
앞에서와 같이 모든 블록에서의 속도와 경계면을 이루 는 점들이 결정되면 이로부터 속도모델을 구한다. 양 끝 점 사이의 경계면은 각 종착점들을 잇는 선분으로 설정하 였으며, 끝점을 벗어나는 부분의 경계점은 다른 블록과 경계점이 만나는 경우에는 위 블록을 따라가도록 설정하 였고, 만나지 않는 경우는 끝 값을 외삽(extrapolation)하 여 주어진 속도모델 범위내의 모든 곳에 속도를 설정하 였다.
지금까지의 속도분석 과정을 순서도로 도시하였다(Fig.
5). 앞에서 기술한 속도분석 방법은 순차적이고 반복적
인 과정으로 진행될 수 있고, 경계면을 설정할 때 심도의 상한 및 하한을 설정해주는 과정이 필요하기 때문에, 속 도분석의 모든 과정을 처리할 수 있는 GUI(Graphic User Interface)를 개발하여 쉽게 속도분석을 수행할 수 있도 록 하였다.
합성탄성파 탐사자료에의 적용
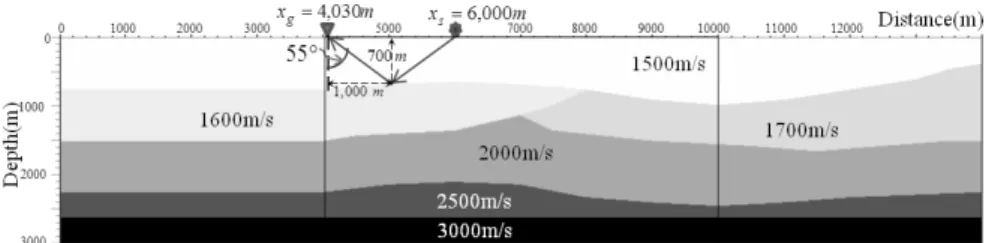
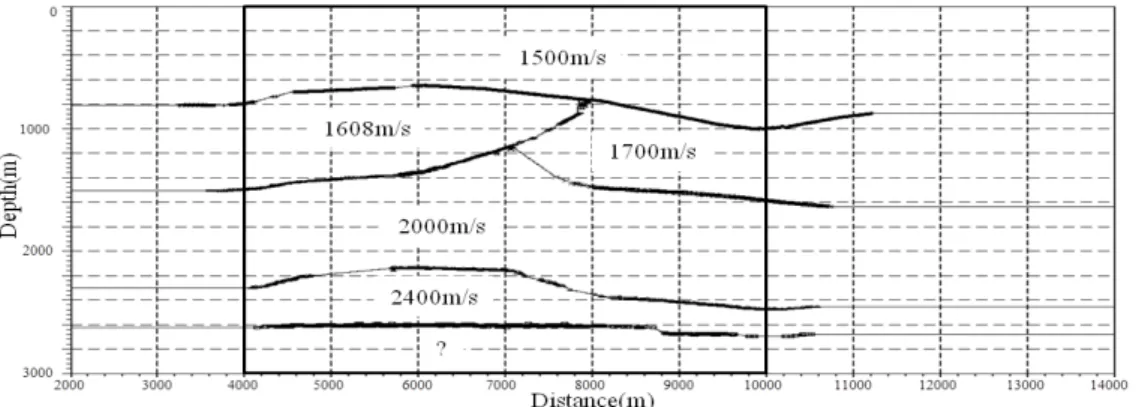
본 연구를 검증하기 위하여, 2차원 시간영역 유한차분 (Finite Difference Time-Domain; FDTD) 모델링 알고 리듬으로 합성탄성파 탐사자료를 생성하여 속도분석을 적용해 보았다. 모사한 속도 모델은 Fig. 6과 같고 실제 분석에 사용된 구간은 검은 색 실선 사각형으로 표시된 최대 겹쌓기(full fold) 구간이다. 속도는 1,500 m/s에서 3,000 m/s까지 순차적으로 증가하도록 구성하였고, 해저 면 지층은 횡적 변화를 위해, 좌측은 1,600 m/s, 우측은 1,700 m/s로 하였다. 본 모형자료는 송신원의 간격이 50 m이고, 수진기가 송신원을 기준으로 -10 m에서 - 4000 m까지 10 m 간격으로 400개 위치하므로(Table 1), 공통 송신점 모음(CSG)의 트레이스의 수는 400이다 (Fig. 7(a)). 공통 수신점 모음(CRG)의 자료는 공통 송신 점 모음 개수의 1/5인 80개가 최대이다(Fig. 7(b)). 이 중 국소 경사 겹쌓기 도시를 위해 사용된 트레이스는 송신 점의 위치 6,000 m, 수신점의 위치는 4,030 m이다(Fig.
6 and 7).
국소 경사 겹쌓기 결과를 설명하기 위하여, 트레이스 에 나타난 4개의 이벤트 중 해저면 경계에서 반사된 이 벤트에 대해서만 국한하여 설명하고자 한다(Fig. 8 and Fig. 9). 공통 송신점 모음(Fig. 8(a))과 공통 수신점 모음 (Fig. 9(a)) 자료 모두 국소 경사 겹쌓기를 위해 7개의 트 레이스를 사용하였고, 트레이스의 위치에 따라 Hamming 함수를 적용하였다. 트레이스의 공통 송신점 모음과 공
Fig. 6. Layered macro velocity model used for local slant stack. For display, one trace are chosen (=6,000 m and =4,030 m). The solid lines indicate the zone of full folds.
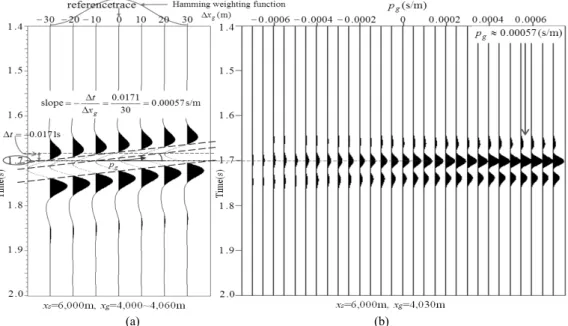
통 수신점 모음 자료의 국소 경사 겹쌓기의 계산 전체영 역은 동일하게 -0.0007 s/m(1,429 m/s의 역수)∼0.0007 s/m으로 하고, 공통 송신점 모음에서는 파선 매개변수의 총 개수 로(∆ s/m) (Fig. 8(b)), 공 통 수신점 모음에서는 (∆ s/m)를 사용하여 파선 매개변수 계산을 촘촘하게 하고자 하였다 (Fig. 9(b)). Fig. 8(b)는 공통 송신점 모음으로
m에서 를 구하는 방법을, Fig. 9(b) 공통 수신점 모음 자 료로 에서 를 구하는 방법을 도시하고 있다.
해저면이 거의 편평하다고 가정했을 때 송신점
m에서 반사점을 지나 수신점 m으로 가는 파 선의 각도는 대략 이며 (Fig. 6), 이 경우 파선 매개변 수 는
sin
sin
s/m가 된다. 공통 송신점 모음에서 단면에서의 경사는
∆
∆
s/m이며, 단면에서 동 일 시간의 최대 값이 0.00057 근처에 존재하므로 국소 경사 겹쌓기가 제대로 작동됨을 알 수 있었다(Fig. 8).
이와 마찬가지 방법으로 공통 수신점 모음에서 단면 에서의 경사를 계산하면 ∆
∆
=-0.000533이며 단면에서 동일 시간의 최대 값 이 -0.000525 근처에 존재함을 볼 수 있다(Fig. 9). 와 값이 약간 다른 것은 입사각이 다름을 보여 주며, 이는 반사면이 완전히 수평하지는 않다는 것을 알려 준 다. 송신점에서 반사점으로 가는 입사각 와 반사점에 서 수신점으로 가는 입사각 를 다음과 같이 구할 수 있다.
sin sin ×
sin sin ×
(8)
와 는 반사점 의 경사각에 대한 정보를 제공한다.
(9)
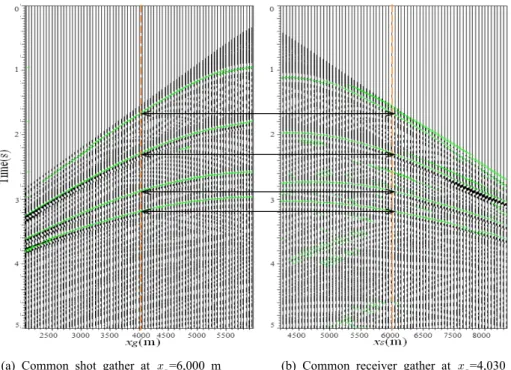
와 는 축을 기준으로 시계반대 방향이 (+)가 되며, 반사점의 경사각는 축을 기준으로 시계반대 방향이 (+)가 된다. 결과의 일부 중 앞에서 사용한 중심 트레이 스(=6,000 m, =4,030 m)에서의 자동추출된 이벤트 는 Table 2와 같다. 각 이벤트마다 5개의 매개변수 ( squared amp.)가 기록되며, 4개의 이벤트가 자동추출 되었음을 알 수 있었다. 여기에서 첫 번째 이벤 트(no. of event=1)의 시간 와 파선 매개변수 가 Fig.
7과 앞에서 계산된 값, 즉 왕복주시 s일 때 파선 매개변수 값 s/m과 거의 일치함을 볼 수 있었다.
각 트레이스에서 자동추출된 최대 파선 매개변수를 그 림으로 검증할 필요가 있다. 검증해야 할 사항은 잡음이 나 다중반사파(multiples) 등과 섞인 신호 중에서 이벤트 가 제대로 자동추출 되었는지의 여부이며, 자동추출된 이벤트의 연속성과 자료의 이벤트의 연속성이 일치하는 가도 고려해야 한다. 이를 위하여 트레이스에서 자동추 출된 최대 파선 매개변수를 경사로 하는 미소 접선을 원 래 트레이스에 겹쳐 도시하여 알고리듬의 타당성을 검증 하고자 하였다. 먼저 Fig. 8에 도시한 공통 송신점 모음 과 공통 수신점 모음의 자동추출 결과를 보면(Fig. 10), 탄성파의 주이벤트가 4개인데, 4개가 모두 자동추출 되 었음을 알 수 있고, 이는 Table 2의 값과 동일한 결과이 다. 그리고 자동추출된 이벤트는 초록색 실선의 미소 접 선으로 표현하였는데, 이 선과 탄성파 이벤트의 연결성
(a) (b)
Fig. 7. Synthetic seismograms using FDTD(Finite difference time-domain) modeling algorithm (a) common shot gather at =6,000 m (no. of receivers=400) and (b) common receiver gather at =4,030 m (no. of shots=80).
(a) (b)
Fig. 8. Determining of ray parameter for common-shot gather at =6,000 m of the synthetic data of Fig. 7 of velocity model Fig. 6 (a) Time-windowed trace gather section for sea-bottom layer indicating slope (b) Time-windowed local slant stack panel ( section) weighted around the reference trace using a Hamming window of (a).
이 어느 정도 일치함도 볼 수 있었다. 그리고 4개의 층의 경계를 나타내는 4개의 이벤트 중에서 동일한 송신점
=6000 m와 동일한 수신점 =4030 m인 트레이스의 자 동추출 결과가 같은 시간에서 추출된 것도 확인하였다 (Fig. 10에서 화살표로 표시). 공통 송신점 모음 트레이
스에서 이격거리가 큰 영역에서는(Fig. 10(a)) 두 번째 이벤트의 크기가 상대적으로 커서 첫 번째 이벤트가 2%
의 최소 기준값에 미치지 못하여서 자동추출이 되지 않 았음을 볼 수 있었다. 이격거리가 큰 영역은 속도 분석에 유용하지 못한 경우도 있기 때문에, 큰 문제가 되지는 않
(a) (b)
Fig. 9. Determining of ray parameter for common-receiver gather for synthetic data (a) Time-windowed trace gather section for sea-bottom layer indicating slope (b) Time-windowed local slant stack panel ( section) weighted around the reference trace using a Hamming window of (a).
Table 2. Autopicked parameters at =4,030 m of common shot gathers at =6,000 m
no. of event time (s) (s/m) squared amp.
1 1.668 0.000568 4.340568e-14
2 2.291 0.000400 8.941537e-13
3 2.876 0.000291 8.121993e-13
4 3.188 0.000211 1.053059e-12
는다고 판단된다.
앞에서 공통 송신점 모음에서 구한 와 공통 수신점 모음에서 구한 가 동일한 이벤트인 경우를 결합하였 다(Fig. 11). 같은 이벤트란 동일한 송수신점에서 같은 시간에 존재하는데, 이 때 같은 시간이란 일정 간격의 시 간을 의미하며, 송신 파형 길이의 1/10에 해당되는 0.02 초를 t_tolerance로 하여 그 한계 내에 들어오는 이벤트 는 같은 이벤트로 간주하였다. Fig. 11의 축의 점들은 송신원과 수진기의 공심점이며 결합된 자동추출 점들은 속도 모형의 경계와 비슷한 양상을 띰을 알 수 있었다.
왼쪽의 해저면에서 자동추출 결과가 오른쪽 해저면에 비 해 굴곡이 있는 이유는 오른쪽 부분의 속도차이가 200 m/s인데 비해 왼쪽 부분의 속도차이가 100 m/s 밖에 되 지 않아서(Fig. 6 참조) 다른 이벤트에 비해 반사계수가 크지 않기 때문인 것과 송신파형이 여러 개의 위글로 이
루어져 있기 때문에 첫 번째 위글에서 자동추출된 경우 와 두 번째 위글에서 자동추출된 경우가 섞여서 나타나 는 현상으로 판단되며, 이런 문제는 속도분석하는 데에 큰 영향을 미치지 않았다.
반복적인 속도분석은 송신원과 수진기가 있는 심도에 서 시작된다. 본 모형자료의 송수신기는 해수면에 위치 하며, 1,300 m/s에서 1,800 m/s까지 5 m/s간격으로 100 개의 속도로 CDR 파선추적하여 두 파선이 근접하는 종 착점이 가장 많은 속도를 첫 번째 속도롤 결정하였다 (Fig. 12). 그림에서 실선은 파선의 근접기준 중 수평거 리에 대한 것으로 5 m로 하였고, 점선은 시간에 대한 근 접기준으로 본 연구에서 사용된 합성 탄성파 자료의 샘 플링 간격(sampling interval)과 같은 0.001초로 하였다.
첫 번째 기준과 두 번째 기준이 거의 같은 양상을 보였 으며, 그림에서 첫 번째 피크에 해당되는 1,500 m/s를
(a) Common shot gather at =6,000 m (b) Common receiver gather at =4,030 m
Fig. 10. Traces and automatically picked events of common shot gather and common receiver gather. Short dip-bars show automatically picked events. Arrows show the same time steps of the autopicked four events between CSG and CRG.
Fig. 11. Combined points of CSG and CRG data. X positions are the midpoints of sources and receivers. The black box is a zone of full folds.
해수의 속도로 결정하였다. 두 파선이 근접되었는지를 확인하기 위하여, 결정된 해수 속도로 CDR 파선추적된 두 파선들을 도시하였다(Fig. 13). 연속된 50쌍만 선택하 여 도시하였는데, 해수면에서 반사된 두 파선의 종착점 은 근접하며 해수면 하부의 파선 쌍들은 속도가 다르기 때문에 근접하기 못함을 확인할 수 있었다. 또한 결정된 속도층의 경계를 정하기 위하여, 일정속도 참반사보정 단면에서(Fig. 14(a)) 경계면의 상한과 하한을 사용자가 지정하면(Fig. 14(b)), 속도를 결정한 블록의 최종적인
경계를 정할 수 있다(Fig. 14(c)). 해저면의 경계를 정하 는데 사용된 두 파선의 근접 종착점의 수는 718개였다.
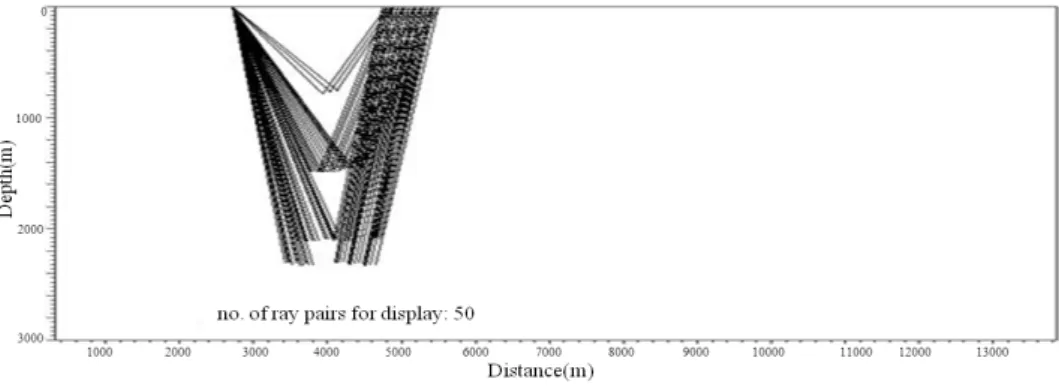
현재 블록의 경계를 정하는 데 사용하지 않았던, 근접 하지 않은 파선들과 경계면과의 교점을 구하였다(Fig.
15). 편의를 위해 1,000개 간격으로 파선과 그에 따른 교 점을 도시하였다. 이 점들을 시작점으로 하여 상부층부 터 순차적으로(strip-off) 속도분석을 수행하게 된다. 해 저면 아래 첫 번째 층에 대한 속도 스캔으로 층의 속도 를 선택하였는데, 모형의 속도와 거의 일치하는 1,608
Fig. 12. Result of scanned velocities versus number of focused points of CDR ray-tracing for a velocity of 0th layer (sea-water layer). Solid line is for distance criterion, xerr, and dotted line is for time criterion, terr. For this case, we selected 0.5 m as xerr , 0.001s as terr, minimum velocity for CDR ray-tracing is 1,300 m/s, and maximum velocity is 1,800 m/s, and the number of scanning velocities is 100. We chose the first peak, 1,500 m/s, as the velocity of 0th layer.
Fig. 13. Plot of ray pairs migrated with the selected velocity, 1,500 m/s, of the water layer. Ray pairs of 0th layer are focused well, those of the others are not focused because velocities below the current layer are different.
(a) Layer boundary points (b) Max. and min. cuts (c) Selected points of thelayer Fig. 14. Interactive selection of the points of 0th layer with constant velocity.
m/s가 되었고, 이 때의 파선을 도시하면 스넬의 법칙을 따라 해저면에서 굴절되는 것을 볼 수 있었다(Fig. 16).
이와 같이 최상층에서부터 하부로 각 층에 대하여 반 복적으로 속도분석을 수행한 후 각 층의 계산된 경계점 을 도시하였다(Fig. 17). 경계점이 없는 부분 중 양 끝 경
계점 내부에 있는 부분은 내삽으로, 양 끝 경계점 외부는 외삽으로 구하여 이를 실선으로 도시하였다(Fig. 17). 최 하부 경계의 우측 부분은 원래 경계면 2,600 m보다 최 대 100 m 정도 낮게 결정되었다. 이는 송신파형의 폭이 0.2초이며 몇 개의 위글로 이루어져 있기 때문에, 지하
Fig. 15. Plot of rays and intersection points with 0th layer boundary.
Fig. 16. Plot of ray pairs migrated with the selected velocity, 1,600 m/s, of the first layer. Rays are refracted on the 1st layer by Snell’s law. Ray pairs of 1st layer are focused well, those of the others are not focused because velocities below the current layer are different.
Fig. 17. Calculated velocity layers. Solid lines between points show interpolation and outer solid lines show extrapolation from end points.
하부로 내려갈수록 속도가 커질 때 속도와 송신파형의 폭의 곱만큼 영상이 퍼지게 된다. 최하부 경계의 우측 부 분의 상부 층의 두께는 180∼200 m 정도로 얇기 때문
에, 직상부 블록의 속도가 2,000 m/s이므로 400 m만큼 영상이 늘어질 수 있으며, 이런 효과가 최하부 경계의 우 측 부분의 영상을 왜곡시킨 것으로 생각된다.
결 론
본 연구에서 개발된 속도분석 방법은 기존의 CDR 속 도 분석법과 여러 면에서 차이점이 있다. 먼저 블록단위 의 일정속도를 가정하는 매크로 모델을 적용함으로써 직 선의 식으로 간단히 파선추적을 수행할 수 있기 때문에 CDR 파선추적 계산시간을 급격히 줄일 수 있어 속도를 스캔하면서 적합한 속도추정이 가능하다. 속도 결정시에 도 기존 CDR 속도분석 방법에서는 비용함수를 최소화 하는 방법을 사용하였으나, 본 연구에서는 정해진 최대 근접범위 안에 모인의 파선들의 종착점의 개수를 스캔된 속도의 따라 구함으로써 적합한 속도를 구하는 방법을 사용한다. 비용함수를 사용하는 기존의 CDR 방법에서 는 유한개의 파라미터로 가정하여 속도를 설정하기 때문 에 경계면을 모호하게 추정할 수밖에 없었으나, 본 연구 의 방법에서는 명확한 경계면을 설정이 가능하고 또한 경계면에서의 경사각도 같이 구할 수 있다. 또한 기존의 방법에서는 파선 추적을 수행할 때 속도가 변하는 영역 에서의 파선의 굴절을 계산하기 위해 paraxial 근사를 사 용할 수 밖에 없지만 본 연구에 사용된 방법에서는 블록 내의 일정속도를 사용하고 경계면의 경사를 구하기 때문 에 스넬의 법칙을 직접 적용하여 파선의 굴절을 처리할 수 있다.
합성 탄성파자료에 국소 경사 겹쌓기를 적용하여 자동 추출한 결과, 트레이스의 반사 이벤트를 잘 찾아가는 것 을 확인할 수 있었으며, 파선 매개변수 값도 잘 결정될 수 있음을 확인하였다. 또한 자동추출된 자료에 본 연구 에서 개발한 일정속도 매크로 모델 strip-off CDR 속도 분석법을 적용한 결과 파선 범위 내에서의 경계면이 명 확히 설정되는 것을 확인할 수 있었다.
결론적으로 본 연구에서 개발된 속도분석법은 효율적 인 계산시간과 명확한 속도경계 결정이 가능한 안정적인 속도분석법이며, 합성 탄성파 자료에 적용해서 좋은 결 과를 얻을 수 있었다. 또한 이 방법은 특성상 3차원 탄성 파 자료에도 쉽게 확장이 가능하기 때문에 잠재성이 큰 방법이다.
사 사
이 연구는 2013년도 산업통상자원부의 재원으로 한국 에너지기술평가원(KETEP)의 지원을 받아 수행한 연구 과제입니다(20132510100060). 저자 중 이성철은 2013 년도 강릉원주대학교 교수연구년 연구지원에 의하여 연 구에 참여하였습니다. 그리고 합성탄성파 탐사자료를 모 사해준 조용채에게 감사드립니다.
References
Al-Yahya, K., 1989, “Velocity analysis by iterative profile migration,” Geophysics, Vol. 54, No. 6, pp. 718-729.
Billette, F. and Lambaré, G., 1998, “Velocity macro-model estimation from seismic reflection data by stereotomo- graphy,” Geophys. J. Internat., Vol. 135, No. 2, pp. 671-680.
Biondi, B., 1990, Seismic velocity estimation by beam stack, PhD thesis, Stanford University, USA.
Biondi, B., 1992, “Velocity estimation by beam stack,”
Geophysics, Vol. 57, No. 8, pp. 1034-1047.
Cheong, S., Kim, Y.J., Kim, W.S., Koo, N.H., Kim, J.H.
and Lee, H.Y., 2013, “Long offset seismic data processing for deep water hydrocarbon survey of Ulleung basin, East sea, Korea,” J. of The Korean Society of Mineral and Energy Resources Engineers, Vol. 50, No. 1, pp. 1-10.
Deregowski, S.M., 1990, “Common-offset migration and velocity analysis,” First break, Vol. 8, No. 6, pp. 225-234.
Dix, C.H., 1955, “Seismic velocities from surface measurements,”
Geophysics, Vol. 20, No. 1, pp. 68-86.
Doherty, S. and Claerbout, J., 1976, “Structure independent velocity estimation,” Geophysics, Vol. 41, No. 5, pp.
850-881.
Faye, J.P. and Jeannot, J.P., 1986, “Prestack migration velocities from focusing depth analysis,” Expanded Abstract of SEG 52th Annual International Meeting, Houston, Soc. Expl. Geophys., Expanded Abstracts, pp.
438-440.
Ji, J. and Choi, Y.G., 2010, “3D seismic data processing methodology using public domain software system,”
Geophysics and Geophysical Exploration, Vol. 13, No.
2, pp. 159-168.
Kwon, T., Byun, J. and Seol, S.J., 2013, “Automatic velocity analysis considering anisotropy,” J. of The Korean Society of Mineral and Energy Resources Engineers, Vol. 50, No.
1, pp. 11-20.
Lafond, C.F. and Levander, A.R., 1993, “Migration moveout analysis and depth focusing,” Geophysics, Vol. 58, No.
1, pp. 91-100.
Liu, Z., 1995, Migration velocity anlaysis, PhD Thesis, Center for Wave Phenomena, Colorado School of Mines, Golden CO, USA.
Liu, Z. and Bleistein, N., 1995, “Migration velocity analysis:
theory and an iterative algorithm,” Geophysics, Vol. 60, No. 1, pp. 142-153.
MacKay, S. and Abma, R., 1992, “Imaging and velocity estimation with depth-focusing analysis,” Geophysics, Vol.
57, No. 12, pp. 1608-1622.
MacKay, S. and Abma, R., 1993, “Depth-focusing analysis
최 윤 경
1986년 서울대학교 자원공학과 공학사 1992년 서울대학교 대학원 자원공학과
공학석사
2001년 서울대학교 대학원 자원공학과 물리탐사전공 공학박사
현재 서울대학교 대학원 에너지시스템공학부 겸임교수 (E-mail; [email protected])
이 성 철
1983년 서울대학교 물리학과 이학사 1985년 서울대학교 대학원 물리학과
석사
1989년 서울대학교 대학원 물리학과 이학박사
현재 강릉원주대학교 물리학과 교수 (E-mail; [email protected])
신 창 수
1979년 한양대학교 자원공학과 공학사 1981년 한양대학교 대학원 지구물리학
공학석사
1988년 University of Tulsa, U.S.A. 지구 물리학 공학박사
현재 서울대학교 공과대학 에너지자원공학과 교수 (E-mail; [email protected])
using a wavefront-curvature criterion,” Geophysics, Vol.
58, No. 8, pp. 1148-1156.
Riabinkin, L.A., Napalkov, Yu.V., Znamenskiy, V.V., Voskresenskiy, Yu.N. and Rapoport, M.C., 1962, “Teoriya i praktika seysmicheskogo metoda RNP (Theory and practice of the CDR seismic method),” Transaction of the Gubkin Institute of Petrochemical and Gas Production, Vol. 39, Gostoptekhizdat, Moscow (in Russian).
Rieber, F., 1936, “A new reflection system with controlled directional sensitivity,” Geophysics, Vol. 1, No. 1, pp.
97-106.
Sword, C.H., 1984, “The method of controlled directional reception,” SEP-41, Stanford University, pp. 369-393.
Sword, C.H., 1986, “Tomographic determination of interval velocities from picked reflection seismic data,” Expanded
Abstract of SEG 56th Annual International Meeting, Houston, Soc. Expl. Geophys., Expanded Abstracts, pp.
657-660.
Sword, C.H., 1987, Tomographic determination of interval velocities from reflection seismic data: The method of controlled directional reception, PhD Thesis, Stanford University, USA.
Yilmaz, O. and Chambers, R., 1984, “Migration velocity analysis by wave-field extrapolation,” Geophysics, Vol.
49, No. 10, pp. 1664-1674.
Zavalishin, B.R., 1982, “Improvements in constructing seismic images using the method of controlled directional reception,” Expanded Abstract of SEG 52th Annual International Meeting, Dallas, Soc. Expl. Geophys., pp.
121-122.