http://dx.doi.org/10.7839/ksfc.2014.11.4.001
반복 학습제어를 이용한 전기유압액추에이터의 위치제어 Position Control of Electro Hydraulic Actuator (EHA)
using an Iterative Learning Control
도안녹치남
1․우엔민트리
1․박형규
1․안경관
1*D. N. C. Nam, N. M. Tri, H. G. Park and K. K. Ahn
Received: 26 May. 2014, Revised: 12 Aug. 2014, Accepted: 17 Sep. 2014
Key Words:Learning Control(학습제어), Iterative PID Control(반복PID제어), Embedded Computer(임베디드컴퓨터), Electro–Hydraulic Actuator (EHA)
Abstract: This paper presents the development of a compact position generator to be used for industrial purposes based on a pump controlled Electro-Hydraulic Actuator (EHA), which is closed-loop controlled by an embedded based Iterative PID controller. The controller is designed by combining the PID controller and the iterative learning scheme to perform tracking control for periodically desired references. Control algorithm is implemented on an embedded computer (AD 7011-EVA) which makes the implementation and application in industrial environments easier.
* Corresponding author: [email protected], Tel:052-259-2282 1 School of Mechanical and Automotive Engineering, University of Ulsan, Ulsan, Korea
Copyright Ⓒ 2014, KSFC
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://
creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
기호설명
: external loading force (N)
: desired command (mm)
: position of cylinder (mm)
: control signal to the DC motor (V)
*: control signal modifier (V)
: control signal modifier
: adaptation gain
1. Introduction
Hydraulic systems have played an important role in modern industry due to its durability, high power, and reliability. In most of previous
industrial applications, hydraulic actuators have been operated using valve controlled systems.
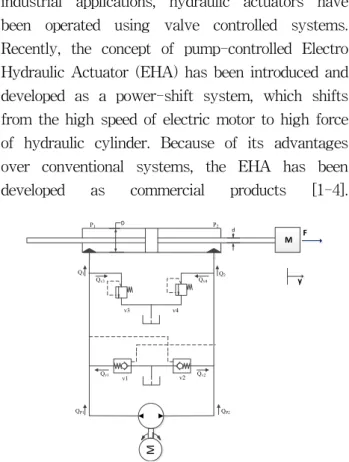
Recently, the concept of pump-controlled Electro Hydraulic Actuator (EHA) has been introduced and developed as a power-shift system, which shifts from the high speed of electric motor to high force of hydraulic cylinder. Because of its advantages over conventional systems, the EHA has been developed as commercial products [1-4].
y
M
d
P1 D P2
Q1 Q2
QP2 QP1
Qv4 Qv3
Qv2
Qv1 v1 v2
v3 v4
M F
Fig. 1 Structure of the pump-controlled Electro
Hydraulic Actuator (EHA)
Motor driver Linear encoder
Embedded AD7011-EVA Load
Cell
Weigh
Computer y
M
D d
P
1P
2Q
1Q
2Q
P2Q
P1Q
v4Q
v3Q
v2Q
v1v
1v
2v
3v
4M F
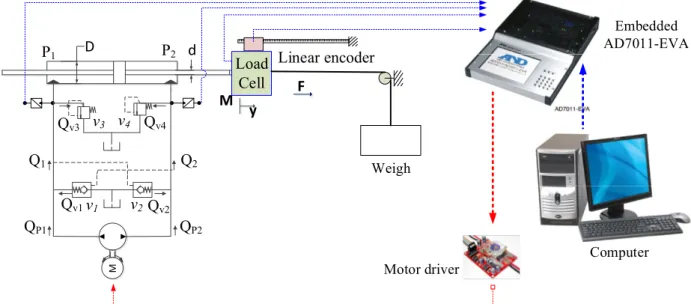
Fig. 2 Structure of experimental test rig Consequently, EHAs, as position or force
generators, have been employed to a wide range of application fields such as plastic injection-molding, metal forming technology, aeronautics, etc. The EHA configuration is shown in Fig. 1.
For most industrial applications, especially for assembly lines, hydraulic actuators are usually employed as motion generators for accurate tracking of various periodic or non – periodic trajectories. The control problem of pump–
controlled EHA systems faces challenges of high nonlinearities and uncertainties due to the nonlinear dynamics of cylinder and uncertain fluid parameters. However, simple control algorithms with robust performances are usually preferred for use in industrial environments due to reliability features. Hence, it is important to figure out a simple control algorithm, yet can handle performance of EHA system with high accuracy.
In order to implement control algorithms;
embedded based systems are preferred over the computer based system due to low cost, compactness, and high reliability. However, the development and updating for computer based systems are much simpler. Consequently, there are several trends of developing new generations of embedded computer system which can ensure both the characteristics of embedded system and
computer systems for best implementation and performance.
This paper presents the development of a new position generating system for use in industrial environments. Actuating system is based on the commercial EHA manufactured by Bosch Rexroth and a symmetrical double acting hydraulic cylinder.
In this paper, performance of the conventional PID controller is improved with the iterative learning scheme [5-6] to provide accurate tracking performance for desired periodic references. All the control system is implemented on an embedded computer, named as A&D EVA-7011, which runs on linux operating system with a real-time extension (Xenomai). Advantage of this embedded system is that it allows to be programed directly from Matlab/Simulink environment of a host PC.
This makes the development process become more convenient and maintain robust response for the industrial applications.
The remains of this paper is organized as
follows. In section 2, configuration of experimental
system is described. Section 3 presents the control
algorithm and its implementation procedures for
the embedded computer. Next, experimental results
are carried out to evaluate the effectiveness of the
proposed control method in section 4. Finally, some
conclusions are made in section 5.
2
3
5 6
8 7 1
4
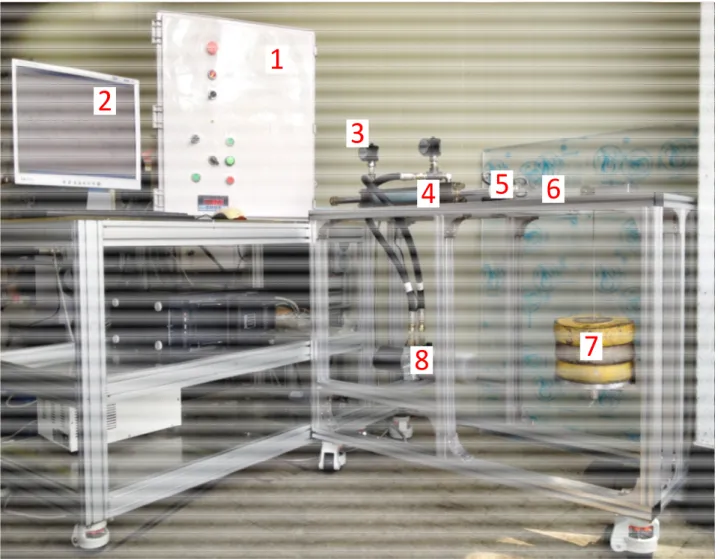
Fig. 3 Experimental apparatus: 1-control system with AD-EVA 7011; 2-Program computer with Simulink; 3-Pressure transducers; 4-Cylinder; 5-Load ceil; 6- Linear encoder; 7-Attached weight;
8-Bosch Rexroth EHA.
2. Experimental test rig
In this paper, the EHA system is manufactured by Bosch Rexroth, which includes a gear pump, supplement valves system, and a symmetrical double acting cylinder. The whole system is driven by a 24V – 20A DC servo motor. In this configuration, the movement of the cylinder is adjusted directly by the speed of the servo motor.
One linear encoder, two pressure transducers and one load cell are installed to the system to measure the cylinder position, the pressure in two chambers of main EHA and the loading force, respectively. The load simulator part is a gravity loading system which can adjust the loading force easily by changing the attached mass. This is a
simple yet efficient method to simulate the variation of working condition for the EHA system.
The developed controller is implemented on a DSP based system, named as AD7011-EVA [7].
This is an embedded computer run on linux OS with a real-time extension (Xenomai), and allow to be programed directly from Matlab/Simulink, environment of a host PC. Some key features of this embedded computer are the tele-programing via Ethernet environment, Visual Touch Screen for observation purposes, 8 channels Analog I/O and 12 channels Digital I/O, and several communication standards.
The compact size of embedded computer and
flexible programing capabilities together with the
compact EHA system bring advantages to the
Fig. 4 Simulink diagram of the proposed controller industrial application for this new hydraulic control
system. Schematic diagram of the whole pump–
controlled EHA system is shown as Fig. 2, setting parameters for the EHA system are shown in Table 1, while the apparatus is setup as Fig. 3.
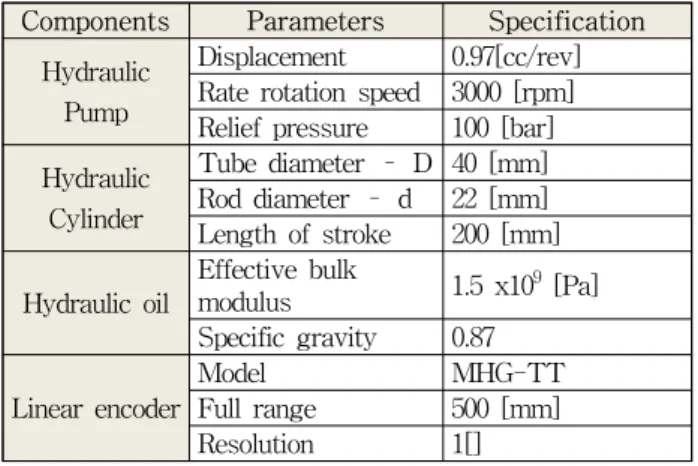
Table 1 Setting parameters for the EHA system Components Parameters Specification
Hydraulic Pump
Displacement 0.97[cc/rev]
Rate rotation speed 3000 [rpm]
Relief pressure 100 [bar]
Hydraulic Cylinder
Tube diameter – D 40 [mm]
Rod diameter – d 22 [mm]
Length of stroke 200 [mm]
Hydraulic oil
Effective bulk
modulus 1.5 x10
9[Pa]
Specific gravity 0.87
Linear encoder
Model MHG-TT
Full range 500 [mm]
Resolution 1[]
3. Control system development
In this paper, the EHA system is closed loop control for various periodic desired trajectories.
The control signal is developed based on the combination of the conventional PID controller with an iterative learning mechanism. The control system is built on Matlab/Simulink environment of a personal computer. Then, the algorithm is
compiled into C code and programmed to the AD EVA7011 directly via Ethernet environment. The whole procedure is discussed by two subsections as follows.
3.1 Control algorithm
Given a bounded desired trajectory
, the objective of this section is to determine the input speed command for the AC servo motor to control the output position track as closed as possible to
.
Define the tracking error as:
(1)
The control signal modifier in this paper is calculated by the conventional PID controller
(2)
where,
are control gains of the modifier.
Employing a modified Iterative Learning Control (ILC) scheme, the control signal of EHA system in the
iteration is defined as follow:
(3)
here, is the adaptation gain,
is the last iteration, and the modifier term of control signal
is calculated by equation (2). It is the control signal of the conventional PID controller.
It is noted that the iterative learning based controller is designed only for periodic desired references. The convergence analysis for this controller for a linear time varying model has been done by Ali Madady in (6). Inspired by this result, we follow the procedure and find optimal controller gain for position tracking purpose of the EHA system.
3.2 Implementation to the AD 7011-EVA
The development of the proposed controller is done on Matlab/Simulink environment of a Host PC for eases of modifying or optimizing with various working conditions. Simulink model of the developed controller is carried out as shown in Fig. 4. Then the Simulink diagram is compiled into C code. Here, inputs and outputs of the real-time window targets and the embedded compiler for Matlab/Simulink are provided by A&D Company Ltd[7]. Then the Human Machine Interface (HMI) on AD7011-EVA board is developed and displayed in Fig. 5. Once the controller had been developed, modifications and improvements can be done easily with simple procedures and tele-programming can be done via internet. This is a great advantage AD7011-EVA provides.
Fig. 5 Design of HMI for AD7001-EVA
4. Experiment implementation
4.1 Experimental parameters:
For the designed experimental test rig, the control parameters of the developed iterative PID controller are selected as:
-1.0 -0.5 0.0 0.5 1.0
Pos error [mm]
0 20 40 60 80 100
120 REF
Response
Sin Response [mm]
-2 0 2 4 6
8 P1
P2
Pressure [bar]
0 5 10 15 20
-12 -8 -4 0 4 8 12
Control Signal [V]
Time [s]
Fig. 6 System response for 0.1Hz sinusoidal trajectory, no load condition
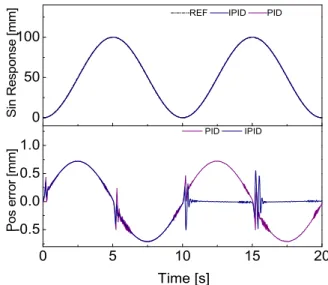
0 5 10 15 20
-0.5 0.0 0.5
1.0
PID IPIDTime [s]
Pos error [mm]
0 50 100
REF IPID PID
Sin Response [mm]
Fig. 7 Comparison for 0.1Hz sinusoidal trajectory,
no load condition
Meanwhile, parameters of PID controller are obtained easily by choosing the adaptation gain.
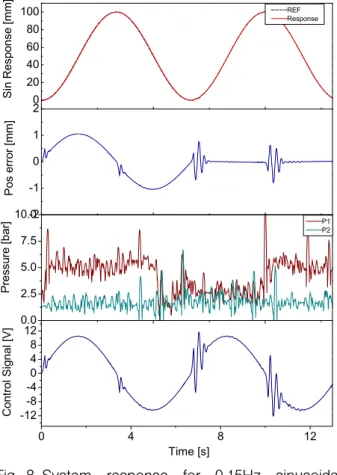
-2 -1 0 1 2
Pos error [mm]
0 20 40 60 80
100 REFResponse
Sin Response [mm]
0.0 2.5 5.0 7.5
10.0 P1
P2
Pressure [bar]
0 4 8 12
-12 -8 -4 0 4 8 12
Control Signal [V]
Time [s]
Fig. 8 System response for 0.15Hz sinusoidal trajectory, 30 kgf loading force
0 5 10
-1 0 1 2
Time [s]
PID IPID
Pos error [mm]
0 50 100
REF IPID PID
Sin Response [mm]