CopyrightⒸ2012 KSAE / 120-12 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2012.20.6.083 Transactions of KSAE, Vol. 20, No. 6, pp.83-91 (2012)
HILS 기반 Series HEV 버스 주행 전략 개발에 대한 연구
정 대 봉1)․김 민 재1)․강 형 묵1)․민 경 덕*1)․조 용 래2)․이 춘 범3)
서울대학교 기계항공공학부1)․대우버스 선행개발팀2)․자동차부품연구원 그린카파워트레인연구본부3)
Study on the Development of Control Strategy for Series Hybrid Electric Bus based on HILS
Daebong Jung1)․Minjae Kim1)․Hyungmook Kang1)․Kyoungdoug Min*1)․ Yongrae Cho2)․Chunbeom Lee3)
1)School of Mechanical and Aerospace Engineering, Seoul National University, Seoul 151-744, Korea
2)Advanced Development Team, Daewoo Bus Corporation, 1-26 Gilcheon-ri, Sangbuk-myeon, Ulju-gun, Ulsan 689-821, Korea
3)Department of Green Car Powertrain Research, Korea Automotive Technology Institute, 74 Yongjeong-ri, Pungse-myeon, Cheonan-si, Chungnam 330-912, Korea
(Received 28 November 2011 / Revised 22 May 2012 / Accepted 18 June 2012)
Abstract : In recent days, the study on hybridization of the heavy-duty is going on, actively. Especially, the improve- ment of fuel economy can be maximized in the intra-city bus because it drives the fixed route. For developing the hybrid electric intra-city bus, optimized control strategy which is possible to be applied with real vehicle is necessary. If the real-time control strategy is developed based on the HILS, it is possible to verify the real-time ability and fail-safety function which has the vehicle stay in safe state when the functional errors are occurred. In this study, the HILS system of series hybrid electric intra-city bus is developed to verify the real time control strategy and the fail-safety functions.
The main objective of the paper is to build the HILS system for verifying the control strategy (rule-based control) which is implemented to reflect the Dynamic Programming results and fail-safety functions.
Key words : Series hybrid electric bus(직렬형 하이브리드 전기 버스), Hardware in the loop simulation(하드웨어 인 더 룹 시뮬레이션), Control strategy(제어전략), Rapid control prototyping(래피드 컨트롤 프로토타이핑), Controller area network(계측 제어기 통신망)
Nomenclature1) ACC : Acceleration signal SOC : State of charge VSPD : Vehicle speed
Subscripts upper : upper limitation lower : lower limitation com : command
*Corresponding author, E-mail: [email protected]
1. 서 론
최근들어 일반 승용 자동차 뿐만 아니라 대형 차 량에 대해서도 하이브리드화를 진행하려는 움직임 이 활발하다. 다양한 하이브리드 차량 동력원 구성 중, 직렬형 하이브리드 차량의 경우 엔진을 최적의 상태에서 작동 시킬 수 있으며, 대형 모터를 사용하 므로 회생 제동을 통하여 병렬형 하이브리드 자동 차에 비하여 많이 운동에너지를 회수할 수 있다. 이 는 정차가 많은 시내 버스의 경우 직렬형 하이브리 드 차량이 병렬형 하이브리드 차량과 비교하였을
정대봉․김민재․강형묵․민경덕․조용래․이춘범
경우 갖는 큰 장점이다. 또한 시내 버스는 주행 패턴 이 거의 정해져 있으므로 최적의 주행 전략을 적용 하여 높은 연비 개선 효과를 얻을 수 있다. 즉, 일반 승용차의 경우 주행 상황을 예측하기 힘들어 최적 제어 이론을 적용한 주행 전략을 적용하기 힘들지 만 시내 버스와 같이 일정 구간을 운행하는 차량의 경우 최적 제어 이론을 적용한 주행 전략을 적용하 여 최고의 연비 성능을 구현할 수 있다.
주행 전략의 경우 Off-Line 시뮬레이션 환경에서 개발하는 경우가 대부분인데, 이는 실차에 적용하 기 어렵다는 단점이 있다. 이와 같은 단점을 극복하 여 바로 차량에 적용 시킬 수 있을 정도의 주행 전략 을 개발하기 위하여 본 연구에서는 HILS(Hardware In the Loop Simulation)를 기반으로 주행전략을 개 발하였다. HILS 기반 병렬형 하이브리드 시내 버스 에 대한 연구1)가 진행된 적이 있으나 직렬형 하이브 리드 시내버스에 대한 연구는 미비한 실정이다.
일정 주행 모드에서 최대 연비 성능을 도출 해 낼 수 있는 최적 제어 이론(Dynamic Programming)을 이 용하여 얻은 결과를 바탕으로 Rule-Based 제어 전략 을 구현하여 HILS 시스템에 적용, 주행 전략의 실시 간 성능과 Dynamic Programming 결과와 연비 성능 을 비교/검증하였다. 또한 Fail-Safety Function을 구 현하여 차량에 이상이 생겼을 경우, 주행 전략과의 연동을 통하여 차량의 주행 성능을 확보하고 안전 한 상태로 유지할 수 있도록 하였다.
2. HILS 시스템 구성
HILS 시스템은 크게 3가지로 구성된다. 먼저, HILS 시스템를 제어하고 결과값을 모니터링 할 수 있는 HOST PC, 실시간 모델의 계산을 수행하며 외 부 Hardware와 통신을 하는 Target PC, 실시간 주행 전략을 적용하여 차량의 제어를 수행하는 RCP(Rapid Control Prototyping)가 바로 그것이다.
2.1 시뮬레이션 대상 차량
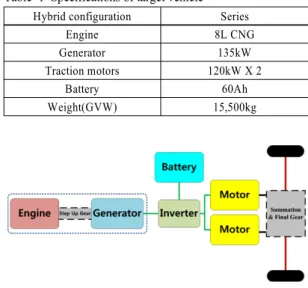
본 연구에서 개발 대상으로 삼고 있는 차량의 제 원은 Table 1과 같다.
연구 대상 차량의 동력원 구성은 Fig. 1과 같으며 배터리와 CNG 탱크는 차량 상부에 장착된다. 일반
Table 1 Specifications of target vehicle Hybrid configuration Series
Engine 8L CNG
Generator 135kW
Traction motors 120kW X 2
Battery 60Ah
Weight(GVW) 15,500kg
Fig. 1 Configuration of target City Bus
적으로 버스에서는 브레이크 작동과 출입문의 개폐 를 위하여 공압을 사용하나 본 연구에서는 공압 사 용은 없다고 가정하였다.
2.2 실시간 시뮬레이션 모델
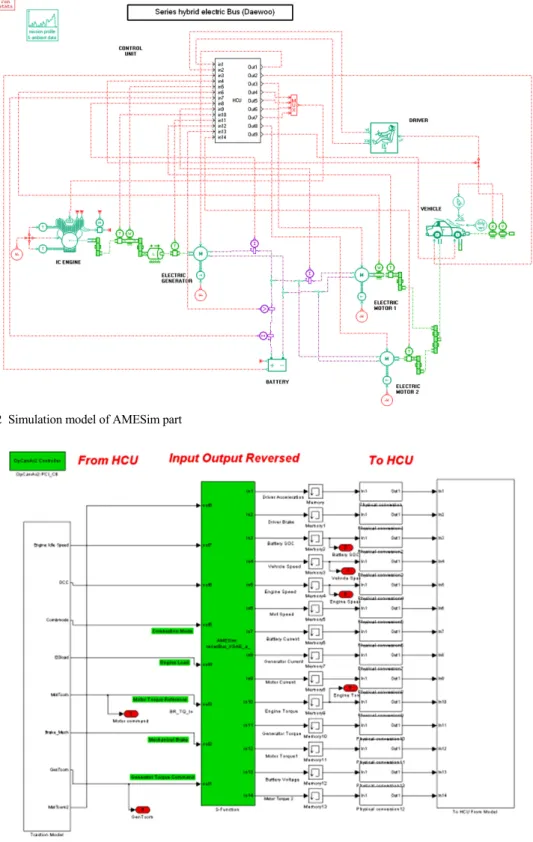
본 연구에서 사용한 실시간 시뮬레이션 모델은 AMESim과 Matlab/Simulink를 기반으로 하고 있다.
AMESim을 기반으로 개발한 이전 연구에서 검증된 Fixed Step 차량 모델을 사용하였다.2) 차량 모델에는 운전자 모델, 엔진 모델, 발전기 모델, 구동 모터 모 델, 배터리 모델, 종방향 차량 동역학 모델 등이 포 함되어 있다. Matlab/Simulink의 경우 외부 하드웨어 인 RCP 장비와의 통신을 위한 인터페이스 모델을 구현하는데 사용하였다. 두 모델은 Matlab/Simulink 의 S-Function을 이용하여 연동된다.3) AMESim 모델 부분과 Matlab/Simulink 모델 부분은 Figs. 2, 3과 같다.
2.3 Hardware 구성
본 연구에서 사용한 HOST PC와 Target PC는 OPAL-RT 사의 RT-LAB과 QNX를 기반으로 하고 있다. HOST PC는 HILS 시스템을 전체적으로 제어 하며, 실시간 시뮬레이션 모델을 Target PC에 맞게 컴파일하여 전송하는 기능을 수행한다. 또한 시뮬 레이션 수행 시, 시뮬레이션 결과를 모니터링 할 수 있는 기능도 수행한다. Target PC는 실제로 시뮬레
HILS 기반 Series HEV 버스 주행 전략 개발에 대한 연구
Fig. 2 Simulation model of AMESim part
Fig. 3 Simulation model of Matlab/Simulink part
Daebong Jung․Minjae Kim․Hyungmook Kang․Kyoungdoug Min․Yongrae Cho․Chunbeom Lee
Fig. 4 Configuration of HILS system
Fig. 5 Schematic diagram of HILS system
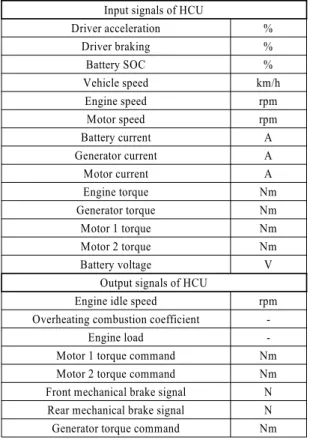
Table 2 CAN I/O List
Input signals of HCU
Driver acceleration %
Driver braking %
Battery SOC %
Vehicle speed km/h
Engine speed rpm
Motor speed rpm
Battery current A
Generator current A
Motor current A
Engine torque Nm
Generator torque Nm
Motor 1 torque Nm
Motor 2 torque Nm
Battery voltage V
Output signals of HCU
Engine idle speed rpm
Overheating combustion coefficient -
Engine load -
Motor 1 torque command Nm
Motor 2 torque command Nm
Front mechanical brake signal N Rear mechanical brake signal N
Generator torque command Nm
이션이 수행되는 PC이며 RCP 장비와의 통신을 위 한 CAN 모듈이 장착되어 있다. 실시간 주행전략이
실행되는 장비인 RCP는 ETAS 사의 ES1000을 이용 하였다. RCP 역시 Target PC와의 통신을 위한 CAN 모듈을 장착하고 있으며, RCP를 제어하는 PC와의 통신을 위한 모듈도 장착하고 있다. 본 연구에서 구 성한 HILS 시스템을 Fig. 4에 나타내었다. HILS 시 스템의 전반적인 구동 개념도는 Fig. 5에 나타내었다.
Fig. 5에서 확인할 수 있듯이 RCP 장비와 RT-LAB (Target PC)는 CAN을 통하여 정보를 주고받는다.
CAN은 Standard 형태의 프로토콜을 이용하였으며, 본 연구에서 이용한 CAN I/O는 시뮬레이션 모델에 서 얻을 수 있는 제어 파라미터 및 제어를 위해 필요 한 신호를 고려하여 설정하였다. CAN I/O 목록은 Table 2와 같다.
3. 주행 전략 및 Fail-Safety Function 앞에서 언급하였듯, 본 연구에서 대상으로 하고 있는 시내 버스의 경우는 일정 주행 구간을 운행한 다. 따라서 주행 패턴이 거의 일정하므로 특정 주행 패턴에 최적화된 주행 전략을 적용하여 연비 향상 을 이룰 수 있다. 따라서 본 연구에서는 서울 시내를 주행하는 150번 버스의 주행 패턴에 최적화된 주행 전략을 구현하는데 중점을 두었다. 이를 위하여 Dynamic Programming 결과를 기반으로 제어 규칙 을 수립하였다.4) 본 연구에서 사용한 150번 버스의 실제 주행 노선과 주행 패턴, 주요 특징은 Figs. 6, 7 과 Table 3에 표시하였다. 이 주행 패턴은 실제로 운 행한 150번 버스의 실측 데이터를 통계적 방법을 이 용하여 구성한 것이다.
3.1 주행 전략
본 연구에서는 주행 전략을 구현하기 위하여 Dynamic Programming 결과를 바탕으로 얻은 제어 파라미터 와 제어 규칙 등을 이용하였다. Dynamic Program- ming의 경우 엔진의 동력학을 고려하지 않으므로 잦은 On/Off 현상이 나타나고 초기 SOC와 최종 SOC를 같게 만들기 위한 제한 조건 안에서 최적의 동력원 운용을 찾는 것이므로 이를 완벽하게 재현 하기는 매우 어려운 일이다. 따라서 Dynamic Pro- gramming 결과를 추종하기 위하여 이 결과를 바탕 으로 엔진의 On/Off 시기 및 엔진의 작동점을 찾아
Study on the Development of Control Strategy for Series Hybrid Electric Bus based on HILS
Table 3 Specification of no.150 City Bus route
Maximum speed 74.73 km/h
Average speed 14.54 km/h
Time 1719 sec
Distance 6.95 km
Fig. 6 Route of no. 150 City Bus
Fig. 7 Speed profile of no.150 City Bus route
이를 제어 규칙화 하여 주행 전략에 적용하였다.
제어 규칙을 설계하기 위하여 Dynamic Program- ming 결과 중 엔진이 작동 할 경우의 차량 동력, 속 도, 배터리 SOC 값을 분석하였다. 엔진 작동 시의 차량 동력은 모터의 작동 속도와 최대 토크를 이용 하여 가속 페달 신호로 변환 하였다. 이를 바탕으로 설계 된 제어 규칙은 Fig. 8과 같은 순서도로 설계되 었으며 주요 제어 규칙은 가속 페달 신호, 차량 속 도, 배터리 SOC이다.
이와 같은 제어 규칙은 ASCET의 State Machine을 이용하여 상태를 정의한 후, 엔진의 가동 여부를 결 정하는 구조로 구현하였다.5)
위의 순서도에서 EV Mode는 배터리만을 이용하 여 차량을 구동하는 순수 전기차 모드를 의미하며,
Fig. 8 Flow chart of real-time control strategy
Hybrid Mode는 엔진을 가동시켜 전기를 발전시키 며 차량을 구동하는 모드를 의미한다. Hybrid Mode 에서는 가장 효율이 좋은 지점에서 엔진과 발전기 를 작동 시킨다.
회생 제동의 경우 최적 제동 선도를 Fig. 9와 같이 계산하여 적용하였다.6) 최적 제동 선도는 아래와 같 은 식을 이용하여 계산하였다.
(1)
(2)
(3)
여기서 은 차량 중량, 는 중력가속도, 은 전 륜과 후륜 차축 사이의 거리, 는 무게 중심과 전륜 차축사이의 거리, 는 무게 중심과 후륜 차축 사이 의 거리, 는 무게 중심의 높이, 는 차량의 가속도,
는 전륜에 가해지는 힘, 은 후륜 차축에 가해지 는 힘을 의미한다.
Fig. 9 Optimal braking force distribution line
정대봉․김민재․강형묵․민경덕․조용래․이춘범
대상 차량은 후륜에만 모터를 장착하고 있으므로 후륜 제동을 회생 제동과 마찰 제동으로 나누어 적 용하였다. 또한 차속이 감소되면 모터의 회전 속도 가 너무 느려져 모터 제어가 어려우므로 일정 속도 이하에서는 마찰 제동만을 적용하도록 하였다.
3.2 Fail-Safety Function
Fail-Safety Function은 실제 차량에 문제가 발생하 였을 경우 운전자에게 이상 유무를 알리며 정비가 끝나 정상적인 상태가 될 때까지 차량을 안전한 상 태로 유지하기 위한 기능이다. 또한 차량이 위험 상 태로 빠지지 않게 하기 위한 기능도 수행한다. 본 연 구에서는 각각의 대표적인 Fail 상황 2가지에 대하 여 Fail-Safety Function을 구현하여 HILS를 통하여 검증하였다.
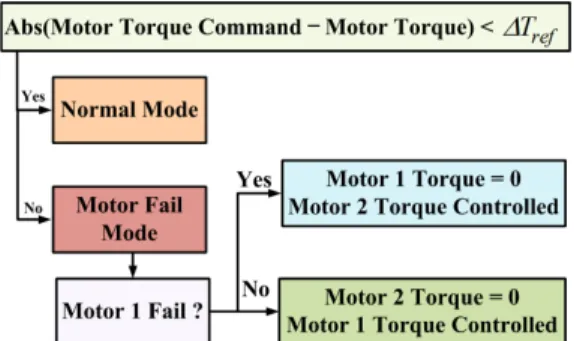
3.2.1 구동 모터 고장 시 Fail-Safety Function 개발 대상 차량의 경우 후륜에 2개의 구동 모터를 장착한다. 이러한 차량에서 가장 대표적인 기능 고 장은 2개의 구동 모터 중 1개의 구동 모터가 고장 나 는 경우라 할 수 있다. 따라서 차량 구동 중 1개의 모 터가 고장 났을 경우, 이를 인지하고 차량을 정상적 인 주행상태로 유지하기 위한 Fail-Safety Function을 구현하여 적용하였다. 이 역시 ASCET의 State Machine 을 이용하여 고장 상태를 파악하였고, 이 정보를 통 하여 나머지 모터의 제어를 결정하였다. 본 연구에 서 사용한 로직은 아래 순서도와 같다.
위의 순서도에서 확인 할 수 있듯이, 모터의 토크 명령과 실제 모터 토크의 차이의 절대값이 ∆보 다 클 경우 이를 모터 고장 상황으로 인지하며, 고장 상황이 인지되면 두 모터 중 고장난 모터를 찾아낸
Fig. 10 Algorithm for the fail-safety function of motor fail
다. 이 정보를 바탕으로, 고장난 모터의 토크 명령은 0으로 하고 고장 나지 않은 모터의 토크 명령을 2배 로 하여 기존의 차량 동력 성능을 최대한 유지할 수 있게 하였다.
3.2.2 경사로 밀림 방지 Fail-Safety Function 직렬형 하이브리드 차량의 경우 모터만을 이용하 여 차량을 구동하고 있으므로 경사로에서 차량이 출발 할 경우 차량이 뒤로 밀릴 가능성이 매우 크다.
더욱이 버스의 경우 중량이 매우 크므로 경사로에 서 정차 후 출발 시 뒤로 밀려 대형 사고를 유발할 가능성이 일반 승용차에 비하여 높다고 할 수 있다.
운전자의 의도와는 다르게 차가 뒤로 밀리는 경우, 고장은 아니지만 전방향으로만 주행을 원하는 운전 자의 의도에서 벗어나는 Fail 상황이라 할 수 있다.
따라서 밀림으로 인한 사고를 예방하기 위하여 경 사로 밀림 방지 Fail-Safety Function을 구현하여 제 어 로직에 적용하였다. 경사로임을 차량이 인지하 기 위해서는 각도센서를 이용하는 것이 유리하나 대상 차량에서는 각도센서가 없으므로 가속 및 제 동 페달, 모터의 속도를 이용하여 Fail-Safety Func- tion을 구현하였다. 본 연구에서 적용한 로직을 아래 순서도에 표현하였다.
위 그림에서 확인할 수 있듯이, Fail 상황 감지는 차량이 정지 한 상태에서 브레이크 신호가 0 이상인 경우부터 시작한다. 이후 엑셀 페달과 브레이크 신 호가 모두 0인 상황에서 모터의 속도가 0이 아닌 경 우, 이를 Fail 상황으로 감지하여 모터 토크 제어를 통하여 차량이 뒤로 밀리는 것을 방지한다.
Fig. 11 Algorithm for the fail-safety function of stop - start on the slope road
HILS 기반 Series HEV 버스 주행 전략 개발에 대한 연구
Fig. 12 Control strategy implemented in the ASCET
4. 실시간 시뮬레이션 결과 4.1 실시간 주행 전략 성능 검증
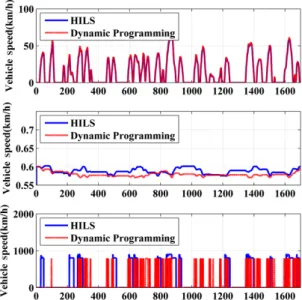
본 연구에서 구현한 실시간 주행 전략과 Dynamic Programming 결과를 비교하여 실시간 주행 전략의 성능을 검증하였다. ASCET을 이용하여 구현한 실 시간 주행 전략은 Fig. 12와 같다. 이와 같은 주행 전 략을 적용하여 실시간 시뮬레이션을 진행한 결과, 배터리의 SOC 거동 및 엔진 작동을 비교한 그래프 는 Fig. 13과 같다.
그래프에서 볼 수 있듯이 Dynamic Programming 의 경우 엔진을 자주 On/Off하고 있다. 하지만 이는 최적 동력원 운용을 위한 계산이므로 실제 실시간 주행 전략으로 구현하기에는 많은 어려움이 따른 다. 따라서 실시간 주행 전략에서는 이를 고려하여 최대한 엔진 On/Off를 억제하는 제어 규칙을 적용하 였다. 단, 엔진이 매우 잦은 On/Off를 하는 지점에서 는 엔진을 지속적으로 작동시키는 제어 규칙을 적 용하였다. 이와 같은 주행 전략을 적용시킨 결과 연 비 성능은 Dynamic Programming 결과를 1로 보았을 경우, HILS에 구현된 실시간 주행 전략으로부터 0.91의 표준화된 연비 결과를 얻을 수 있었다.
4.2 Fail-Safety Function
Fail-Safety Function의 정상적인 작동을 검증하기
Fig. 13 Comparison of HILS and dynamic programming
위하여 모터의 고장 상황과 경사로에서 출발 상황 을 모사하여 주었다. 이때의 Fail-Safety Function의 구동 여부와 차량 모델 상태를 계측하여 Fail-Safety Function을 검증하였다.
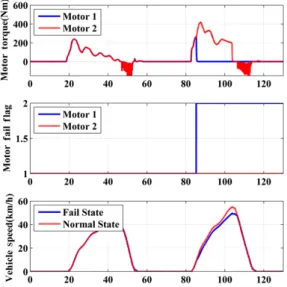
4.2.1 구동 모터 고장 시 Fail-Safety Function 검증 모터 고장을 모사하기 위하여 주행 중 2개의 모터 중 1개의 모터에서 발생하는 토크를 0으로 만들어 RCP 장비에 인가하였다. 이후 Fail-Safety Function
Daebong Jung․Minjae Kim․Hyungmook Kang․Kyoungdoug Min․Yongrae Cho․Chunbeom Lee
Fig. 14 Fail-safety function for motor fail
은 모터의 고장을 Fig. 14와 같이 인지하였으며, 차 량의 안전한 주행을 위하여 다른 모터를 제어하여 2 개의 모터를 사용하였을 경우와 거의 동등한 구동 성능을 확보하고 있음을 보여 주었다.
4.2.2 경사로 밀림 방지 Fail-Safety Function 검증 경사로에서의 출발 시, 밀림을 방지하는지를 검 증하기 위하여 가속 및 제동 페달의 신호를 제거하 였으며, 10% 경사로를 가정하였다. 밀림 방지 Fail- Safety Function은 Fig. 15와 같이 경사로 출발 시 밀 림을 인지하였으며, 가속 및 제동 페달의 신호 없이
Fig. 15 Fail-safety function for incline road start
차량을 정지 상태로 유지하고 있음을 확인할 수 있 었다.
5. 결 론
본 연구에서는 시리즈 HEV 버스용 HILS 시스템 을 구성하였으며, 이를 통하여 실시간 주행 전략 및 Fail-Safety Function의 성능을 테스트 하였다.
1) AMESim과 Matlab을 이용하여 실시간 시뮬레이 션 모델을 구성하였으며, 이를 RT-LAB 환경에 서 구현하였다.
2) 실시간 주행 전략의 경우 최적 제어 이론을 기반 으로 계산한 최적 동력원 운용을 모사할 수 있도 록 로직을 구성하였으며, 이를 ASCET을 이용하 여 구현하였다.
3) ASCET을 이용하여 구현한 실시간 주행 전략은 전반적으로 Dynamic Programming과 충/방전 경 향이 같음을 확인 할 수 있었다. 이와 같은 실시간 주행 전략 적용하였을 경우 Dynamic Program- ming의 연비 결과를 1로 표준화 하였을 경우, 0.91의 표준화된 연비 결과를 얻을 수 있었다.
4) Fail-Safety Function의 경우 경사로 밀림 방지, 모 터 고장 시 차량 구동 제어 전략 보정을 위하여 구성되었으며, HILS 시스템을 통하여 그 성능을 검증하였다.
5) 본 연구에서 구성한 HILS 시스템은 차후 시리즈 HEV 버스의 실제 HCU의 성능 테스트 및 Fail- Safety Function의 검증에 활용 될 수 있을 것이며 이를 통하여 실제 HCU의 신뢰성을 높일 수 있을 것으로 기대된다.
후 기
본 연구는 지식경제부 산업원천기술개발사업 (HEV/PHEV 시스템 성능 최적화 및 통합제어 원천 기술 개발/10033110-2011-13)의 일환으로 수행되었 습니다.
References
1) W. Park, H. Ham, K. Jin, H. Kim and H. Lee,
“The Study on HCU Test with HILS of HEV Commercial Bus System,” Annual Conference
Study on the Development of Control Strategy for Series Hybrid Electric Bus based on HILS
Proceedings, KSAE, pp.3007-3012, 2010.
2) M. Kim, D. Jung and K. Min, “Series Type Hybrid Bus Research of SILS System,” Annual Conference Proceedings, KSAE, pp.2929-2934, 2010.
3) LMS, AMESim-RT V9.0 Manual, 2009.
4) J. Jeong, D. Lee, C. Shin, W. Lim, Y. Park and S. Cha, “Analysis of Correlation of Fuel Effi-
ciency and Cost Depending on Component Size of Heavy-duty Parallel Hybrid System,” Trans- actions of KSAE, Vol.19, No.3, pp.73-82, 2011.
5) ETAS, ASCET-RP V6.0 Manual, 2008.
6) Y. Gao, L. Chen and M. Ehsani, “Investigation of the Effectiveness of Regeneration Braking for EV and HEV,” SAE 1999-01-2901, 1999.