CopyrightⒸ2016 KSAE / 142-15 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2016.24.3.372 Transactions of KSAE, Vol. 24, No. 3, pp.372-378 (2016)
자동화 수동변속기용 건식클러치의 속도기반 Kiss-Point 능동 보상에 관한 연구
최 우 석․이 교 범․임 원 식*
서울과학기술대학교 자동차공학과
A Study on the Speed-based Active Compensation of the Kiss-Point of Dry-type Clutch Equipped with Automated Manual Transmission
Woo-Seok Choi․Kyo-Bum Lee․Wonsik Lim*
Department of Automotive Engineering, Seoul National University of Science and Technology, Seoul 01811, Korea (Received 12 January 2016 / Revised 4 March 2016 / Accepted 4 March 2016)
Abstract : Clutch torque control is the key to the ride comfort improvement of a vehicle equipped with AMT (automated manual transmission). For such control, the torque transfer starting point, known as the “kiss point,” should be indicated or at least estimated to compensate for the clutch torque. The kiss point changes due to wear, high temperature, and fatigue; as such, it should be estimated while the vehicle is being driven. In this study, the method of kiss point active estimation for an AMT vehicle with a dry-type clutch was devised. The kiss point is learned while the engine is in an idle state and while the transmission is at a neutral gear position. It is determined when the input shaft of the transmission starts to rotate by slowly engaging the clutch. The noise of the shaft speed signal during the slow engagement process is filtered for accurate control. The kiss point estimation at various clutch engagement speeds was analyzed via a vehicle test.
Key words : Kiss-Point(키스 포인트), Touch point(접촉점), Automated manual transmission(자동화수동변속기), Dry-type clutch(건식클러치), Estimation(추정), Heavy duty vehicle(중 부하 차량)
Nomenclature1)
: speed ,
: radius,
: diameter,
: force,
: rotational speed,
: rotational inertia,
: torque,
: displacement,
: spring stiffness,
: gear ratio
*Corresponding author, E-mail: [email protected]
: lever ratio
: friction coefficient
1. 서 론
자동화수동변속기(AMT : Automated Manual Trans- mission) 차량의 발진 및 변속상황에서 승차감을 높 이기 위해서는 클러치 슬립과정에서의1) 전달토크 의 제어가 중요하다.2) 클러치 전달토크를 원활히 제 어하기 위해서는 클러치 결합과정에서 토크의 전달 이 시작되는 시점인 Kiss-Point의 위치를 반드시 알 고 있어야 한다. 또한 Kiss-Point는 클러치 디스크의 마모,3) 온도,4) 피로,5) 회전속도6) 등에 따라 수시로
자동화 수동변속기용 건식클러치의 속도기반 Kiss-Point 능동 보상에 관한 연구
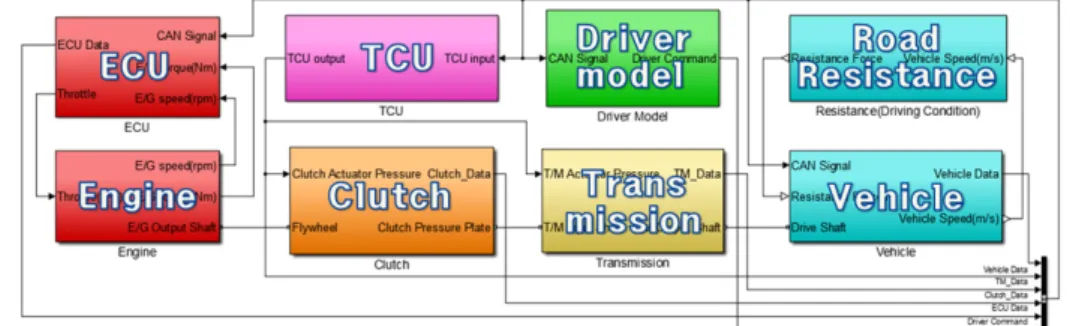
Fig. 3 Full vehicle simulator
변한다. 따라서 주행 중 수시로 Kiss-Point를 보상해 주어야 클러치 전달토크를 원활히 제어할 수 있다.7) 클러치를 결합하는 과정에서 회전속도의 변화나 토크의 변화를 측정하여 Kiss-Point를 인지하는 연 구들이 진행되어 왔다. 클러치 결합 과정에서 변속 기 입력축의 속도가 상승하기 시작하는 시점을 Kiss- Point로 결정하게 되는데 이때, 차량의 센서특성에 따라서, 축이 회전을 시작하는 낮은 회전속도 영역 의 계측이 불가능한 상황이 존재한다. 이때는 부득 이하게 센서에서 계측이 가능한 최소속도를 기준으 로 Kiss-Point를 결정해야한다.
본 연구에서는 건식클러치가 적용된 AMT차량의 Kiss-Point 능동보상 방법을 고안하였다. 변속기는 중립이고 엔진은 아이들인 상태에서 보상이 이루어 지며, 클러치를 결합하는 과정에서 변속기 입력축 의 속도가 일정 속도까지 상승 했을 때의 시점을 계 측 하여 Kiss-Point를 결정할 수 있도록 하였다. 이를 위해 건식 클러치가 적용된 AMT 차량을 모델링하 고 시뮬레이터를 구성하였으며,8) Kiss-Point 능동보 상 로직을 적용하여 시뮬레이션하였다. 차량 시험 을 통해 클러치 엑추에이터의 제어속도에 따라 변 화되는 보정 값을 분석하였으며, 이전 Kiss-Point를 새로 인지된 값으로 대체될 때 새로운 값이 바로 적 용되지 않고 일정 가중치를 주어 적용되도록 하였 다. 시뮬레이션과 실차 시험을 통해 Kiss-Point인지 로직을 검증하였다.
2. 시스템 모델링 2.1 차량 시스템 모델링
차량의 주행부하계를 Fig. 1과 같이 모델링 하였
으며 식 (1) ~ (2)와 같이 표현할 수 있다. 주행저항은 공기저항, 구름저항, 등판저항을 적용하였으며 타 이어 슬립은 없는 것으로 가정하였다.
(1)
(2)
파워트레인 부분을 세부 모델링하면 Fig. 2와 같 으며 식 (3) ~ (7)과 같이 표현된다.
(3)
(4)
(5)
(6)
(7)
Fig. 1 AMT Vehicle modeling
Fig. 2 Powertrain modeling
Woo-Seok Choi․Kyo-Bum Lee․Wonsik Lim
식 (1) ~ (7)을 이용하여 차량의 시뮬레이터를 MAT- LAB Simulink를 이용하여 Fig. 3과 같이 구성하였다.
2.2 건식클러치 모델링
연구대상 차량의 AMT에는 pull type의 건식클러 치가 적용되어 있으며 공압 엑추에이터를 통해 작 동된다. 공압 엑추에이터는 크기가 서로 다른(slow/
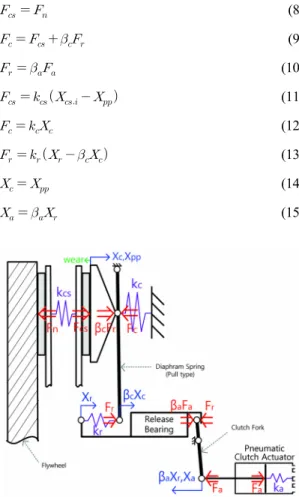
fast) 흡기밸브 2개, 배기밸브 2개로 총 4개가 적용되 어 있다. 흡기밸브를 작동하면 클러치가 분리되고, 배기밸브를 작동하면 클러치가 결합된다. 4개 밸브 의 개폐조합으로 클러치 변위를 제어하게 된다. 건 식클러치 시스템을 Fig. 4와 같이 모델링하였으며, 식 (8) ~ (15)와 같이 표현할 수 있다. 식 (8) ~ (15)를 통해 구한 클러치면 작용력을 식 (16)에 적용하면 클러치 전달토크를 구할 수 있으며 클러치 디스크 의 유효반경은 식 (17)과 같다.
(8)
(9)
(10)
(11)
(12)
(13)
(14)
(15)
Fig. 4 Clutch modeling
(16)
(17)
쿠션스프링, 다이어프램 스프링, 릴리스베어링 의 작용력을 압력판 변위 기준으로 표현하면 Fig. 5 와 같다. Initial point는 클러치의 완전 결합 상태를 위미하며, Kiss point는 클러치가 분리되기 직전인 지점으로 클러치 전달토크가 0이 되는 지점을 의미 한다. 클러치 면에 작용하는 힘을 엑추에이터 변위 에 대해 표현하면 Fig. 6과 같이 표현된다.
Fig. 5 Dry clutch force from pressure plate displacement
Fig. 6 Disk normal force from actuator displacement
3. 클러치 마찰시험 분석 3.1 클러치 성능 확인 시험
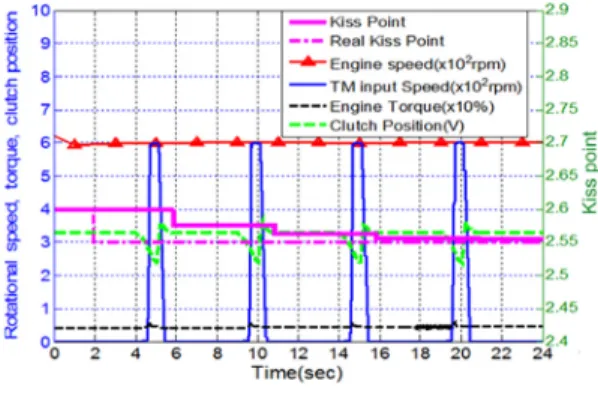
클러치의 특성을 파악하기 위해 Fig. 7과 같이 차 량시험을 수행하였다. 변속기는 중립이고 엔진은 아이들인 상태에서 클러치를 서서히 결합하였으며 시험 결과는 Fig. 8과 같다. Fig. 8을 보면 클러치 변 위가 감소함에 따라 변속기 입력축 속도가 증가하 여 엔진 회전속도와 동일해 지는 것을 확인할 수 있 다. 변속기 입력축 속도센서의 특성상 저속 영역은
A Study on the Speed-based Active Compensation of the Kiss-Point of Dry-type Clutch Equipped with Automated Manual Transmission
Fig. 7 Vehicle test
Fig. 8 Vehicle pretest result
계측이 불가능하기 때문에 150 rpm이하의 영역은 0 으로 출력되었다. 하지만 Fig. 8의 150 ~ 151초 구간 을 보면 변속기 입력축 회전속도가 비정상적으로 높은 값이 반복적으로 계측 되었다. 이 시점은 클러 치로부터 동력 전달이 시작되어 변속기 입력축이 회전을 시작하는 Kiss-Point로 볼 수 있으나, 이 시점 에서 센서의 노이즈가 크게 발생하였다. 따라서 변 속기 입력축의 속도가 150 rpm이 되는 시점을 측정 하여 Kiss-Point를 결정하였다.
3.2 Kiss-Point 능동보상 방법
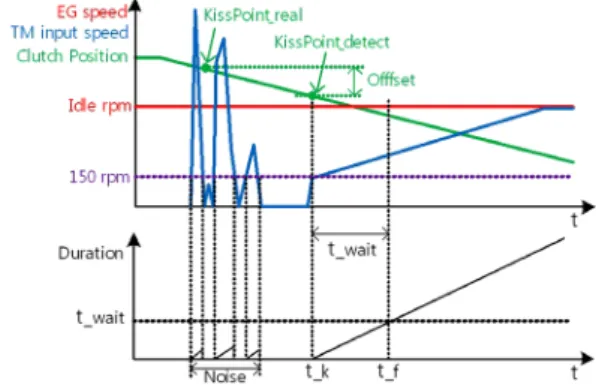
변속기 입력축이 회전을 시작하는 시점에서 발생 하는 노이즈를 걸러내기 위해 Fig. 9와 같이 변속기 입력축 회전속도가 150 rpm을 초과하여 유지되는 시간(duration)을 카운트 하였다. 이 유지시간이 특 정시간(t_wait) 이하일 때의 데이터는 무시하였다.
이 같은 방법으로 노이즈를 제외하고 150 rpm을 초
Fig. 9 Kiss-Point detection method (noise cancelling)
Fig. 10 Transmission input shaft modeling
과하는 시점(kisspoint_detect)을 찾을 수 있다. 이 값에 오차 보정 값을 더하면 실제 Kiss-Point를 알 수 있다.
Kiss-Point 보상은 중립상태에서 수행하기 때문에 Fig. 10과 같이 변속기 쪽에서 작용하는 부하토크는 0이며 입력축에서는 회전관성만이 회전을 방해하 는 요소로 존재한다. 따라서 식 (18)과 같이 표현할 수 있다. 또한 변속기 입력축 속도는 식 (19)과 같으 며 클러치 전달토크는 식 (20)과 같이 엑추에이터 변위에 대한 함수로 표현할 수 있다.
(18)
(19)
(20)
위 식을 이용하여 클러치 변위 제어 속도에 따른 변속기 입력축 회전속도를 표현하면 Fig. 11과 같다.
클러치 제어속도에 따라 변속이 입력축 속도가 150 rpm에 도달하는 시점과 Kiss-Point의 오차 값이 변화 하는 것을 확인할 수 있다.
3.3 클러치 제어속도에 따른 특성 분석 클러치 변위 제어속도에 따라 변화하는 Kiss-Point 의 에러 보정 값을 분석하기 위해 클러치 제어속도
최우석․이교범․임원식
Fig. 11 Kiss-Point learning at various clutch speed
Table 1 Clutch actuator engage signal pulse Test
condition
Pulse period (ms)
Pulse width (ms)
Duty ratio (%)
1 500 8 1.6
2 200 8 4
3 100 8 8
4 80 8 10
5 60 8 13.33
6 40 8 20
7 20 8 40
8 10 8 80
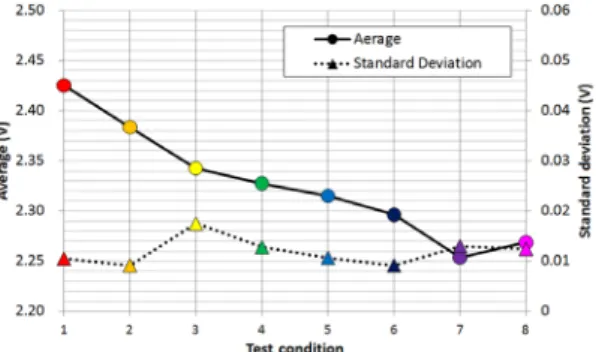
를 변경하며 시험을 수행하였다. Table 1과 같이 slow 배기밸브신호의 펄스폭은 8 ms로 고정하고 주 기를 변경하며 시험하였다. 각 시험조건마다 반복 시험을 수행하였으며 시험결과는 Fig. 12와 같고, 각 시험조건에 따른 결과 값의 평균과 표준편차는 Fig. 13 과 같다.
클러치의 결합속도가 빨라질수록 Kiss-Point 값이 작아지는 경향을 보였으며 모든 조건에서 0.017이 하의 표준편차를 보였다. 각 시험조건에 따른 Kiss- Point의 보정 값은 Fig. 14와 같다.
Fig. 12 Test result (Kiss-Point)
Fig. 13 Test result (average and standard deviation)
Fig. 14 Error compensation at various clutch speed
4. Kiss-Point 능동보상 로직
Kiss-Point 인지 과정에서 센서의 노이즈 등으로 인해 계측시마다 오차가 존재할 수 있다. 따라서 식 (21)과 같이 학습 값에 가중치를 곱하여 적용하 였다. 가중치를 통해 새로 학습한 값에 대한 민감도 를 조정할 수 있도록 하였다. 이를 통해 Fig. 15와 같 이 학습 값에 오차가 크더라도 안정적인 값을 사용 할 수 있다.
× Pr
× (21) Kiss-Point 인지 알고리즘은 Fig. 16과 같으며 Kiss-Point 능동보상 로직은 MATLAB Simulink를 이 용하여 Fig. 17과 같이 구성하였다. Fig. 3의 시뮬레 이터를 통해 Kiss-Point 보상 시뮬레이션을 한 결과 는 Fig. 18과 같다. 시뮬레이터 상에서 2초 시점에 임 의로 물리적인 Kiss-Point를 변경하였을 때 로직이 반복실행 되면서 Kiss-Point가 변경된 Kiss-Point에 수렴되어가는 것을 확인하였다.
실 차량에 Fig. 10의 Kiss-Point 능동보상 로직을
자동화 수동변속기용 건식클러치의 속도기반 Kiss-Point 능동 보상에 관한 연구
Fig. 15 Method of after filter
Fig. 16 Kiss-Point active compensation algorism
Fig. 17 Kiss-Point active compensator
적용하여 시험을 수행하였을 때 시험 결과는 Fig. 18
~ 19와 같다. Fig. 8의 대기시간(t_wait)은 0.3초로 설 정하고 시험하였다. 따라서 Fig. 17과 같이 변속기 입력축 속도가 150 rpm을 초과한 후 0.3초 후에 Kiss-Point가 인지되는 것을 확인할 수 있다. Fig. 14
Fig. 18 Simulation result
Fig. 19 Test result (individual phase)
Fig. 20 Test result (full phases)
의 가중치는 0.5로 설정하였다. Fig. 18을 보면 Kiss- Point를 모르는 상태에서 임의의 값을 초기 값으로
Woo-Seok Choi․Kyo-Bum Lee․Wonsik Lim
주었을 때, 로직이 반복 실행됨에 따라 실제 Kiss- Point에 수렴해가는 것을 확인하였다.
6. 결 론
본 논문에서는 AMT차량의 클러치 Kiss-Point 인 지 방법을 고안하였으며 시뮬레이션과 차량시험을 통해 다음과 같은 결론을 얻었다.
1) 변속기 입력축 회전속도가 150 rpm 이상부터 측 정되는 AMT차량의 클러치 Kiss-Point 측정방법 을 고안하였다.
2) 클러치 엑추에이터 제어속도에 따라 변속기 입 력축 속도가 150 rpm을 초과하는 시점의 엑추에 이터 변위가 달라졌으며, 제어속도가 빠를수록 변위가 낮아지는 경향을 보였다. 제어속도가 변 화하여도 동일 제어 조건에서는 0.017이하의 표 준편차를 보이며 Kiss-Point가 인지되는 것을 확 인하였다.
3) 클러치 엑추에이터 제어속도에 따라 변화되는 실제 Kiss-Point 위치에 대한 보정 값을 분석하였 으며, 제어속도가 빠를수록 보정 값이 커지는 경 향을 보였다.
4) 건식클러치 시스템과 AMT차량의 모델링을 통 해 시뮬레이터를 구성하고 Kiss-Point 능동보상 로직을 적용하였으며, 시뮬레이션과 차량시험 을 통해 미지의 Kiss-Point를 찾아지는 것을 확인 하였다.
후 기
본 연구는 산업통상자원부와 한국산업기술진흥 원의 “수출전략형 FGCV 연구개발사업”의 지원을 받아 수행된 연구결과임.
References
1) Y. J. Youn, D. P. Hong and T. J. Chung, “A
Study on the Stick-Slip Phenomenon of the Driveline System of a Vehicle in Consideration of Friction,” Transactions of KSAE, Vol.3, No.4, pp.19-29, 1995.
2) L. Gielmo and L. Iannelli, V. Vacca and F.
Vasca, “Speed Control for Automated Manual Transmission with Dry Clutch,” 43rd IEEE Con- ference on Decision and Control, Vol.2, pp.1709- 1714, 2004.
3) A. Myklebust and L. Eriksson, “Torque Model with Fast and Slow Temperature Dynamics of a Slipping Dry Clutch,” Vehicle Power and Pro- pulsion Conference, pp.851-856, 2012.
4) S. M. Kim, M. S. Kim, C. W. Shin, W. S. Lim and S. W. Cha, “Development of Contact Point Estimation Algorithm of Dry Type Clutch with Considering the Friction Pad Wear,” Journal of the Korean Society of Manufacturing Techno- logy Engineers, Vol.20, No.6, pp.692-696, 2011.
5) W. H. Nam, C. Y. Lee, Y. S. Chai, J. D. Kwon, Y. T. Bae and S. W. Woo, “A Study on Fatigue and Durability Characteristics of Clutch Diaph- ragm Spring According to Tempering Condition,”
Seoul 2000 FISITA World Automotive Congress, pp.12-15, 2000.
6) I. S. Cho and J. Y. Jung, “A Study on the Dynamic Characteristics of a Electric Motor Clutch for Commercial Vehicles,” Transactions of KSAE, Vol.22, No.1, pp.52-58, 2014.
7) G. Lucente, M. Montanari and C. Rossi, “Mo- delling of an Automated Manual Transmission System,” Mechatronics, Vol.17, No.2, pp.73-91, 2007.
8) W. S. Choi, K. B. Lee, S. H. Jang, W. S. Lim, C. K. Lee and K. H. Kim, “Development of the Simulator for the Estimation of the Perfor- mance of Automated Manual Transmission,”
KSAE Spring Conference Proceedings, p.223, 2014.