1. 서 론
강건설계는 시스템 수준에서 부품 및 운용환경의 변량이 시스템 응답에 미치는 영향을 줄일 수 있도록 설계변수를 최적화하여 시스템의 강건성(robustness)을 확보함으로써 품질 및 신뢰성을 향상시키는 설계 기 법이다 예를 들어 유도 포탄 체계 개발에 관련하여. , 등은 레이더 및 화포에 발생하는 노이 Kevin Massey
즈 등을 포함한 다양한 환경에서의 불확실성을 고려 하여 유도 포탄의 성능을 평가하였다.(1)
시스템 응답 모델을 기반으로 하는 강건설계는
시스템의 성능과 관련한 문제들에 다양하게 적용 되어왔다 정적 시스템과는 달리 동적 시스템은 시. 스템의 초기 조건 구성부품들의 생산과정 및 운용, 환경에서의 변량에 의하여 응답이 변화한다.(2) 또 한 차 이상의 동적 시스템의 경우 시스템 설계변3 , 수와 오버슈트(overshoot), 정착 시간(settling time)과 같은 시스템 성능과의 관계를 나타내는 성능 모델 을 구하는 것은 어려운 문제이다 따라서 성능 모. 델링의 어려움 때문에 동적 시스템의 강건설계에 대한 연구가 미진한 실정이다.
동적 시스템의 강건설계에 관련하여 Savage와 은 시정수와 정상상태 각속도와 같은 서보 시 Son
스템의 성능을 수리적 모델로 개발하고 시스템 응, 학술논문
< > DOI http://dx.doi.org/10.3795/KSME-A.2011.35.10.1171 ISSN 1226-4873
확률적 설계 방법을 이용한 동적 시스템의 강건 설계
류장희 최인상 김주성 손영갑
안동대학교 기계자동차공학과 주 한화 종합연구소 체계 실
* , ** ( ) 2
Robust Design of a Dynamic System Using a Probabilistic Design Method
Jang-Hee Ryu*, In-Sang Choi**, Joo-Sung Kim** and Young Kap Son*
* Dept. of Mechanical & Automotive Engineering, Andong Nat’l Univ.
** Dept. of Ammunition System, Hanwha Corporation R&D Center
(Received April 18, 2011 ; Revised August 2, 2011 ; Accepted August 9, 2011)
Key Words: Actuator System(구동기), Dynamic System(동적 시스템), Probabilistic Design(확률적 설계),
강건 설계 변량 반응표면법
Robust Design( ), Variation( ), Response Surface Method( )
초록 본 논문은 동적 시스템인 구동기의 강건설계를 수행한 결과를 제시한다 구동기를 구성하는 부품: . 들의 변량은 구동기의 성능에 변량을 유발한다 따라서 부품들의 변량에 둔감한 구동기의 성능을 확보. 하기 위해 구동기에 대해서 강건설계를 수행하였다 구동기를 구성하는 부품들을 전달함수로 표현하여. 시뮬링크 모델로 구축하였으며 시뮬링크 모델을 이용하여 설계 변수 조합에 따른 구동기의 응답을 얻, 었다 또한 반응표면법을 적용하여 구동기의 응답을 설계 변수들의. 2차 함수로 근사화하였다 구동기. 응답을 출력으로 하는 근사화된 모델에 확률적 설계방법을 적용하여 강건한 구동기의 성능을 위한 최 적 설계변수를 결정하고 기존 설계와 비교한 결과를 제시하였다.
Abstract: This paper shows the robust design results of an actuator, a kind of dynamic system. Variations in the components comprising the actuator cause uncertainties in the system’s dynamic performance. Therefore, a probabilistic design method is applied to ensure robust actuator performance to component variation. A Simulink model for the actuator was built using transfer functions for the components. The dynamic responses of the actuator were evaluated using the Simulink model. Performance indexes were approximated as quadratic functions of the design parameters through the application of the response surface methodology (RSM) with the Simulink model.
Then, a probabilistic design method was applied to the approximated performance indexes to obtain optimal design parameters that would provide robust actuator performance. The optimal design was compared to the present design in terms of the performance indexes and dynamic response characteristics over time.
Corresponding Author, [email protected]
2011 The Korean Society of Mechanical Engineers
Ⓒ
답을 모델링하여 성능을 최적화할 수 있는 설계변, 수를 선정하였다.(3) Seecharan은 시스템 응답에 대 한 메타모델(metamodel)을 구하여 설계변수 조합에 따른 임의 시점에서의 시스템 응답을 예측하였으 며 임의 시점에서 응답의 규격에 대한 순응도를, 최대화할 수 있는 설계인자를 선정하였다.(4)
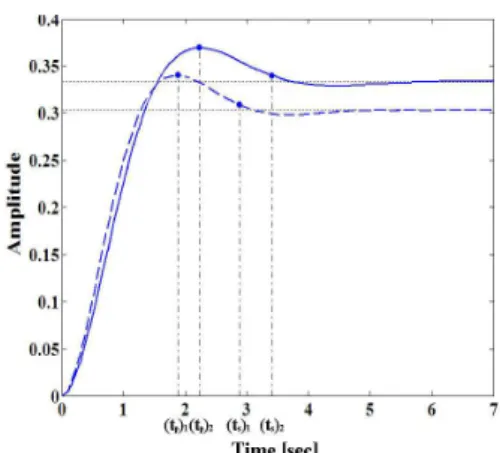
은 동일한 응답 모델식을 가지는 시스템 Fig. 1
의 단위 계단입력에 대한 설계변수에 따른 시스 템 응답특성의 변화를 나타낸다. Fig. 1에서 (tp)i
와 (ts)i는 각각의 설계 에 대한 시스템의 응답특i 성인 오버슈트가 발생하는 시간과 정착시간을 각 각 나타낸다. Fig. 1로 부터 임의의 한 시점에서 의 응답만을 이용하여 최적화한 설계 인자가 시 스템 응답에 대한 최적의 오버슈트와 정착시간을 제공한다고 평가할 수 없다 그러므로 동적 시스. 템의 성능을 최적화하기 위해서는 설계변수와 성 능과의 관계를 나타내는 성능모델을 구축하고 구 축된 성능모델을 이용하여 성능을 최적화할 수 있는 설계변수를 결정해야 한다.
본 연구의 대상 시스템인 유도 포탄의 구동기는 카나드(canard)의 각도를 제어하여 포탄의 궤적을 수 정하는 동적 시스템이다 유도 포탄의 구동기는 서보. 제어기(servo controller), BLDC 모터, 기어조립체 평( 기어 웜기어 카나드 전위차계, ), , (potentiometer)로 구성 되어 있으며 구동기에 대한 블록선도를 Fig. 2에 제 시하였다 구동기는. BLDC 모터에서 발생되어 기어 조립체를 통해 전달되는 동력을 이용하여 카나드의 각도를 변경한다 서보 제어기는. BLDC 모터에 대한 제어 입력을 조절하여 요구되는 카나드 각도와 전위 차계가 감지한 실제 카나드 각도와의 차이인 오차를 최소화 한다.
유도 포탄은 발사 후 비행하여 목표를 타격하 는 것이 짧은 시간에 이루어지는 시스템으로서 유도 포탄의 궤적을 수정하기 위한 장치인 구동 기 또한 짧은 시간에 동작하여야 한다 따라서. 구동기의 성능은 카나드가 빠른 시간 내에 요구 되는 각도에 도달하는 능력으로 평가할 수 있다.
그러므로 카나드가 단위각도에 도달하는 시간이, 빠를수록 임의 시점에서 카나드가 움직이는 각, 도가 클수록 빠른 시간에 동작하는 것이므로 구 동기의 성능이 우수하다고 판단할 수 있다 일반. 적으로 Fig. 2에 제시된 서보 제어기의 성능이 구 동기의 성능에 큰 영향을 미친다.(5) 그러나 제어 기 설계를 수행하기 전에 구동기의 응답 시간이
Fig. 1 Response characteristics for designs
Fig. 2 Block diagram of the actuator system 느릴 경우 제어기를 설계하더라도 카나드 각도, 에 대한 효율적인 제어를 기대하기는 어렵다 또. 한 구동기 부품에 변량이 존재할 경우 구동기 응 답에도 변량이 발생된다 따라서 본 연구에서는. 제어의 효율성을 높이고 부품들의 변량에 둔감하 며 빠르게 카나드의 각도를 변경할 수 있는 구동 기의 성능을 확보하기 위하여 제어기를 설계하기 전에 구동기의 출력인 카나드 각도의 응답특성을 최적화하고자 한다 본 연구에서는 카나드의 각. 도가 단위 각도에 도달하는 시간과 카나드의 반 응 목표 시간인 50 [ms]에서의 카나드 각도를 성 능지표로 정의하였다 또한. BLDC 모터는 모터 드라이브에 의해서 제어가 되기 때문에 모터의 시스템 변수에 대한 변량은 고려하지 않고 상수 로 가정하였다.
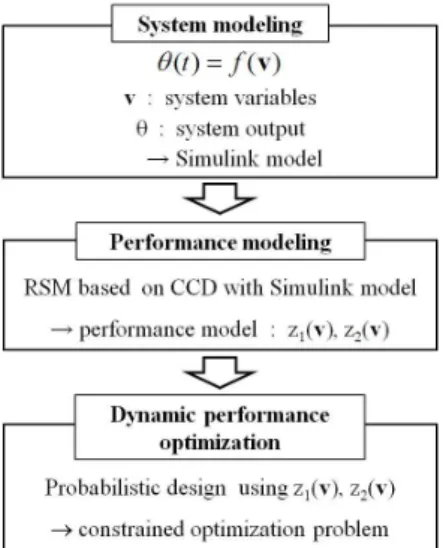
본 연구에서 제안하는 설계 방법론을 Fig. 3에 제시하였다 시스템 모델링 단계에서 구동기 구. 성품들(v 간의 상호관계를 고려하여 카나드의 각) 도(θ(t))에 대한 매틀랩 시뮬링크 모델을 구축한 다 성능 모델링 단계에서는 시뮬링크 모델과 중. 심합성계획법(CCD)을 기반으로 하는 반응표면법 을 이용하여 시스템 변수에 대한 구동기 (RSM)
성능지표를 출력으로 하는 응답 모델식, z(v 을) 도출하고 도출한 응답 모델식에 확률적 설계방법 을 적용하여 최적의 설계변수를 선정한다.
Fig. 3 Overview of proposed design methodology
시스템 모델링 및 확률적 설계 2.
동적 시스템 응답 모델링 2.1
본 연구에서는 3상 Y결선의 방식의 BLDC 모 터를 고려하였다. 3상 BLDC 모터는 모터 회전각 도에 따라 모터 드라이브에 의해 항상 2상이 통 전되도록 스위칭 되며 각 상의 전압 방정식은, 식 (1)과 같다.(6)
c c c c
b b b b
a a a a
V dt e
Ldi Ri
V dt e
Ldi Ri
V dt e
Ldi Ri
= + +
= + +
= + +
(1)
여기서 Vi(i = a, b, c)는 각 상의 전압, R은 저항, 은 인덕턴스
L , ii는 각상의 전류, ei는 역기전력상 수(Ke)와 모터 각속도의 곱으로 표현되는 역기전 력을 나타낸다.
모터에 전압이 공급되면 모터의 각 상에 BLDC
전류와 역기전력이 발생한다 따라서 모터 각속. 도를 ωr라 두면 모터가 발생하는 모터 토크(τm) 는 식 (2)로 정의할 수 있다.
r c c b b a a m
i e i e i e
τ = +ω + (2)
식 (2)에 정의된 모터 토크가 기어조립체로 전 달되어 카나드를 구동한다 구동기의 단순화된.
Fig. 4 Simplified actuator structure with system variables
연결구조와 카나드 구동에 영향을 미치는 시스템 변수들을 Fig. 4에 제시하였다 각 기어의 이수를. Ni(i = 1, 2,.. 4), 각 기어에서의 토크를 Ti, 각 기 어의 각속도를 ωi라 두고 기어에서 마찰이 없다, 고 가정하면 각 기어 축에 대한 운동방정식은, 다음과 같이 표현된다.
T m
b
J1θɺɺ1+ 1θɺ1+ 1=τ (3)
2 3 2 3 , 2 2 3 ,
2 b T T
J θɺɺ+ θɺ + = (4)
4 4
4 4
4 b T
J θɺɺ+ θɺ +τw= (5)
여기서 J1과 b1은 각각 기어 1의 관성모멘트와 베 어링 마찰계수, J2,3과 b2,3은 각각 동일 축에 존재 하는 기어 2와 기어 3의 관성모멘트의 합(=J2+J3) 과 베어링 마찰계수의 합(=b2+b3), J4와 b4는 각각 기어 4의 관성모멘트와 베어링 마찰계수, 토크 τw는 웜에 입력되는 토크를 나타낸다.
기어 1과 기어 2는 T1ω1= T2ω2, 기어 3과 기어 4는 T3ω3 = T4ω4, 기어 2와 기어 3은 동일 축 상에 존재하기 때문에 다음과 같은 관계가 성립 된다.
2 1 2 1 2 2 1 2 2
1 N
T N T T
T = = =
θ θ ω ω
ɺ ɺ
(6)
4 3 4 4 4 2 3 4 4
3 N
T N T T
T = = =
θ θ ω ω
ɺ ɺ
(7)
3 2 3
2 = T, ω =ω
T (8)
식 (6)∼(8)의 관계를 식 (3)∼(5)에 대입하여 모터 토크(τm)에 대한 기어 4의 운동방정식을 다음과 같이 정의할 수 있다.(7)
[ ]
[
b r b r r b]
r r w mJ r r J r J r
r τ
τ θ
θ =
+ +
+ +
+ +
2 2 2 1 4 4 2 2 2 1 3 , 2 2 1 1
4 4 2 2 2 1 3 , 2 2 1 1
2 1
1
ɺ ɺ ɺ
(9)
식 (9)에서 r1과 r2는 평기어의 기어비를 나타내 며 각각, N1/N2과 N3/N4이다 웜에 입력되는 토크. (τw)는 웜기어와 카나드로 전달되며 식 (10)과 같이 표현된다.(8)
(Jwiwg+C2Jg)θɺɺg+C2τc =τw (10)
여기서
( )
(cos( )cos( ) sin( ))
) cos(
) sin(
) cos(
2
l s l n g
l s l n w
l C l
λ µ λ φ
λ µ λ φ
−
= +
c c c c c c
c I θ bθ k θ
τ = ɺɺ + ɺ +
식 (10)에서 τc는 카나드에 입력되는 토크, Jw와 lw는 각각 웜의 관성모멘트와 피치 반경, Jg, ,
, lg, iwg는 각각 웜기어의 관성모멘트 압력각, , 리드각 피치반경 전송률, , , Ic, bc, kc는 각각 카나 드의 관성모멘트 감쇠계수 비틀림 스프링상수, , ,
는 정지마찰계수, θg와 θc는 각각 웜기어와 카나드의 각변위를 나타낸다.
카나드는 웜기어와 결합되어 있어 각변위가 같 으며 웜과 기어, 4는 동일 축에 존재하기 때문에 각변위가 같다 또한 웜기어의 전송률로부터. θ
4=iwgθg이므로 다음과 같은 관계가 성립된다.
c g g
iθwg =θ θ =θ
4 ,
(11)
식 (10)과 (11)을 식 (9)에 대입하여 입력 τm에 대한 카나드의 출력 각도 θc의 전달함수로 표현 하면 식 (12)와 같다.
3 2 2 1
2 1
) (
) (
a s a s a
r r s
T s
m c
+
= +
Θ (12)
여기서
(
J r J r r J)
iwg r r ((Jwiwg C Jg) C Ic)a1= 1+ 12 2,3+ 1222 4 + 1222 + 2 + 2
(
b r b r r b)
iwg r r C bca2= 1+ 12 2,3+ 12 22 4 + 12 22 2
(
r r C kc)
a 2
2 2 2 1 3=
상의 모터와 식 를 이용하여 시뮬 3 BLDC (12)
링크 모델을 구축하였으며 구축된 모델을, Fig. 5 에 제시하였다. Fig. 5에서 P는 모터의 자극(pole) 수, J는 관성모멘트, B는 점성마찰계수이며 제시, 된 시뮬링크 모델로부터 기어비 전송률 등 시스, 템 변수에 따라 구동기의 응답은 변화하기 때문 에 본 연구에서 정의한 성능지표인 카나드의 각 도가 단위 각도에 도달하는 시간(Y1)과 카나드의 반응 목표 시간인 50 [ms]에서의 카나드 각도(Y2) 가 변화한다 구동기의 시스템 변수 중. BLDC 모 터의 변수 평기어의 관성모멘트 웜기어의 관성, , 모멘트는 상수로 가정하고 응답모델의 총 14개 시스템 변수 v = [r1, r2, iwg, b1, b2,3, b4, V, kc, bc
, , lw, lg, ]에 대한 성능지표 Y1과 Y2를 2 차 함수로 근사화하였다. Y1과 Y2의 근사화된 함 수는 각각 식 (13)과 (14)로 표현된다.
∑∑ ∑
∑= = =+ =
+ +
+
=
13
1
14
1 2 14
1 14
1 0 1( )
i i
i ii i
j j i ij i
i
iv vv v
z v α α α α (13)
∑∑ ∑
∑= = =+ =
+ +
+
= 13
1
14
1 2 14
1 14
1 0 2( )
i i
i ii i
j j i ij i
i
iv vv v
z v γ γ γ γ (14)
여기서 z1은 Y1에 대한 2차 근사화 함수를, z2는 Y2에 대한 2차 근사화 함수를 나타내며, , .
, , . 는 추정할 모수이다. z1에 대한모수
, . 를 추정하기 위하여 중심합성계획법을 적용하여 14개 변수에 대한 수준을 5수준으로 고 려하여 총 8221개의 변수 조합으로 구성된 계획 행렬을 정의하였다 계획 행렬을 구성하는 변수. 조합들에 대해 Fig. 5의 시뮬링크 모델을 적용하 여 Y1을 구하였다 또한 시뮬링크 모델을 적용하. 여 구한 성능지표 Y1과 식 (13)으로 정의되는 성 능지표 z1과의 차이를 나타내는 오차를 최소화하 는 z1에 대한 모수를 추정하였다.
Fig. 5 Simulink model
식 (14)에서 z2에 대한 모수 , . 는 식 (13) 의 모수 , . 를 추정하는 방법과 동일한 방 식으로 추정하였다.
확률적 설계 2.2
구동기의 응답을 최적화하기 위하여 본 연구에 서 근사화한 성능지표 z1은 단위각도에 도달하는 시간으로서 z1이 적을수록 카나드의 응답이 빠르 기 때문에 망소특성을 가진다. z2는 카나드의 반 응 목표 시간인 50 [ms]에서 카나드가 도달하는 각도로서 z2가 클수록 구동기의 성능이 우수하다 고 할 수 있으므로 망대특성을 가진다 각 성능. 에 대한 요구되는 규격 즉 임계값을, 과 로 정의하면 식 (13)과 (14)에 정의된 성능지표에 대 한 임계상태함수는 다음과 같이 표현된다.
2 2 2
1 1 1
ζ ζ
−
=
−
= (v) (v)
(v) (v)
z g
z
g (15)
시스템 변수에 대한 변량(v 을 확률 분포로 고) 려하여 분포의 밀도함수를 fv(v 로 정의하면 성능) , 지표에 대한 규격을 만족시키지 못하는 변수들의 영역 실패 영역( , F 에 대한 확률) , Pr(F 는 식) (16) 으로 정의된다.
(
∪)
∪21 ) Pr 21(g ( ) ) (
Pr )
Pr(F = i= Fi = i= i v ≤0 (16)
식 (16)의 확률을 효율적으로 평가하기 위해, v를 분포 특성을 나타내는 모수인 p와 표준정규분포 를 나타내는 u를 이용하여 Γ u, v, p( ) = 0으로 표현되는 Rosenblatt 변환(transformation)(9)을 적용 하면 식 (16)은 식 (17)과 같이 표현된다.
≤
=
=
∪2
1( i( , ) ) Pr
)) ( Pr(
i
0 p u
p g
F (17)
본 연구에서는 FORM(First-Order Reliability 을 적용하여 식 로 정의된 확률을 평 Method) (17)
가한다. FORM을 적용하여 Pr(F(p 을 근사화하면)) 다음과 같다.
( ) ( ) 2( 1 1 2 2 1,2)
2 1
, , )
(
PrF aβ aβ aβ ρ
i∑Φ− i i −Φ − −
≅
=
p (18)
여기서 Φ는 1차원 표준정규누적분포함수, Φ2는 이변수(bivariate) 누적정규분포함수를 나타내며,
)]
0 (
[ =
= i ui
i signg
a , 는 u공간에서 원점으로부터 i 번째 임계상태표면의 u*i (MLFP, Most Likely
까지의 거리를 나타내며
Failure Point) , 는 원점 (u = 0)에서 u*i와 u*j에 이르는 벡터들의 직교성
을 나타내며 식 로 정의된다 (orthogonality) (19) .
2
* 2
*
*
*
,
) ( ) (
j j i i
j j i i j
i a a
a a
u u
u u ⋅
ρ = (19)
여기서 ⋅2는 벡터의 크기(Euclidean length)를 나 타낸다.
식 (19)로부터 구동기의 성능지표에 대한 규격 을 만족시키지 못하는 확률이 설계변수들의 함수 로 표현되므로 구동기의 강건설계를 위한 최적화 문제는 식 (20)으로 정의할 수 있다.
( ( ))
Pr MinRn
p
p
F
∈
subject to the constraints:
0 ) , (up =
g , u⋅null(−∇ug(u,p))=0, X
F( ))≤ Pr( p
U
L p p
p ≤ ≤
(20)
여기서 등식으로 표현되는 구속조건은 FORM을 적용할 때 MLFP에 대한 구속조건을 나타내며,
은 영 공간 를 나타낸다
null (null space) .(9) 또한 X
값은 성능에 대한 규격을 만족시키지 못할 확률 값을, pL과 pU는 설계변수 p에 대한 하한 및 상한 값을 나타낸다.
본 연구에서는 구동기의 성능에 대하여 규격 대 비 식스시그마(Six-Sigma) 수준을 만족시키는 설 계변수를 선정하기 위하여, X값을 3.4x10-6으로 정의하여 목적함수값에 대한 구속조건으로 정의 하였다.
최적화 설계 결과 3.
본 연구에서 고려한 BLDC 모터의 변수들은 상 수이며 각 변수들의 값을, {Ke, L, R, B, J, P} = {0.0827 [V/(rad/s)], 0.000733 [H], 3.4 [Ω], 0 [Nm-s], 0.0005 [Nm-s2], 2}로 정의하였다. BLDC 모터에 의해 발생되는 토크를 Fig. 6에 제시하였 으며 발생된 토크는 기어조립체로 전달된다 구. 동기를 구성하는 총 14개의 시스템 변수들은 평 균이 , 표준편차가 (=×toli/300, toli=10%)인,
여기서 i = 1, 2,…, 14, 정규분포를 따른다고 가 정하고 각 변수의 평균값을 Table 1에 제시하였 다 변수 조합에 따른 성능지표. Y1과 Y2를 Fig. 5 에 제시한 시뮬링크 모델을 이용하여 평가하였 다. 14개의 변수에 대하여 각 변수의 수준을 5수 준으로 하는 중심합성계획법을 이용하여 시뮬링 크 모델로부터 평가된 Y1과 Y2를 식 (13)과 (14) 로 표현된 시스템 변수의 2차 함수로 근사화하였 다.
시스템 변수가 시스템의 동적 성능에 미치는 영향도는 정규화된 민감도를 이용하여 평가할 수 있으며 시스템 변수를, vi, 동적 성능을 z라 두면 정규화된 민감도는 식 (21)로 표현된다.(4)
]
) [
( ) (
V
v v
v
E i i z vi
z v v S z
=
∂
= ∂ (21)
식 (21)에서 E[V]는 Table 1에 나타낸 변수들의 평균값을 나타낸다 식. (13)과 (14)로 표현된 성능 지표 z1과 z2에 대하여 식 (21)을 이용하여 민감 도를 평가한 결과를 Fig. 7에 제시하였다.
Table 1 Nominal values for system variables System
variable
Nominal
value System variable Nominal value v1 (r1) 0.47 v8 (kc)[N-m/rad] 0.5 v2 (r2) 0.7 v9(bc)
[N-m/(rad/s)] 0.1 v3 (iwg) 40 v10 ()[rad] 0.2531
v4 (b1) 0.0005 v11 (λl)[rad] 0.0625 v5 (b2,3) 0.001 v12 (lw)[m] 0.0042 v6 (b4) 0.0006 v13 (lg)[m] 0.0106 v7 (V)[V] 25 v14 () 0.2
Fig. 6 Motor torque
로부터 시스템 변수의
Fig. 7 z1에 대한 민감도 크기
는 v1 > v3 > v4 > v7 > v5 > v9 > v2 > v6 순이며, z2
에 대한 민감도 크기는 v7 > v3 > v2 > v4 > v1 > v5
> v6 순이다 또한. z1은 v2와 v7이 클수록 감소하며 v1과 v3, v4, v5, v6이 클수록 증가한다 그러나. z2는 v1, v2, 그리고 v7이 클수록 증가하며, v3, v4, v5, v6이 클수록 감소한다. v7을 나타내는 전압(V)은 z1과 z2 에 민감한 영향을 미치지만 본 연구에서 전압은 설 계변수가 아니므로 변량만을 고려하였다.
민감도 분석 결과로부터 z1과 z2에 민감한 영향 을 미치는 시스템 변수 6개(v1~v6)를 설계변수로 선정하여 p = [, , , , , ]라 정의하였 다 본 연구에서 고려한 설계 범위는. 0.14≤≤ 0.56, 0.2667≤≤1.067, 35.2≤≤44.8, 0.0001≤
≤0.002, 0.0001≤≤0.004, 0.0001≤≤0.002이 다 또한 구동기 성능에 대한 규격을 고려하여. 식 (15)에서 임계값을 = 6 [ms], = 10 로 선정하고 성능에 대한 임계상태함수를 [degree]
g1과 g2로 정의하였다 예를 들어 식. , (15)의 z1에 대한 임계상태함수 g1은 다음과 같이 표현된다.
+ +
+ +
+
+ +
−
=
∑
∑∑
∑
=
= =+
=
14
1
2 13
1 14
1 14
1 0
1 1
) (
) )(
(
) (
) , (
i
i i i ii i j i
j j j i i i ij i
i i i i
u
u u
u
g
σ µ α
σ µ σ µ α
σ µ α α
ζ u p
식 (20)으로 정의되는 최적화 문제에 대한 해를 방법을 기반 SQP(Sequential Quadratic Programming)
으로 하는 Matlab 프로그램의 fmincon 함수를 사 용하여 구한 결과를 Table 2에 제시하였다. Table 2에서 pi는 초기 설계를, po는 최적화된 설계를
(a) z1 (b) z2
Fig. 7 Normalized sensitivity of performances to system variables
나타낸다 설계변수를 제외한 시스템 변수가. Table 에 제시된 평균값을 가지는 경우 설계
1 pi와 po에
대하여 시간에 따른 카나드의 각도 변화를 Fig. 8에 제시하였다. Fig. 8로부터 po는 pi보다 카나드의 각 도가 단위 각도에 도달하는 시간(Y1)을 감소시켰으 며, 50 [ms]에서의 카나드 각도(Y2)를 증가시켰다. 설계 po가 pi보다 시스템 변수의 변량에 둔감한 구 동기 성능을 제공하는지를 평가하기 위해서 변수, 들의 변량을 고려하여 각 변수들을 10,000개씩 랜 덤 추출하여 변수들의 조합에 따른 Y1과 Y2에 대 한 히스토그램 그리고 평균값, (μ) 및 표준편차값
를 와 에 각각 제시하였다
(σ) Fig. 9 Table 3 . Fig. 9
와 Table 3으로부터 설계 po가 pi에 대비하여 Y1을 감소시켜 Y1의 평균값을 29.8%, 그리고 표준편차를
정도 감소시켰다
53.7% . Y2의 경우 설계, po는 pi에
대비하여 Y2를 증가시켰기 때문에 Y2의 평균값을 약 1.7배 그리고 표준편차를 약, 3.1배 정도 증가시 켰다 그러나. Table 3에서 Pr(F(p))는 규격을 만족시 키지 못하는 확률을 나타내는데 동일한 규격에 대, 하여 po가 을 나타내기 때문에0 po가 pi보다 변량에 둔감한 구동기 성능을 제공한다고 평가할 수 있다.
본 연구에서는 특정 BLDC 모터를 고려하여 연 구를 수행하였으나 모터가 변경되는 경우에는 기 어 조립체로 입력되는 토크가 변경된다 모터 토. 크가 변경될 경우에도 po가 pi에 대비하여 최적화 된 성능을 제공할 수 있는지 평가하기 위해 기어 조립체로 입력되는 토크를 단위 계단입력으로 설 정하였다 단위 계단입력에 대하여 상기의 방법. 과 동일하게 변수들을 10,000개씩 랜덤 추출하여 시뮬레이션을 수행하였으며 각 설계에 대한 결, 과를 Fig. 10과 Table 4에 나타내었다. Fig. 10은 각 설계의 Y1과 Y2에 대한 히스토그램 그리고, 각각의 평균값과 표준편차값을 Table 4에 제시하 였다. Fig. 10과 Table 4로부터 po가 pi에 대비하여 Y1은 감소시켰으며, Y2는 증가시켰다 따라서 기. 어조립체로 입력되는 토크가 변경되더라도 po
Table 2 Optimized design results
pi po
0.47 0.2307
0.7 0.4815
40 36.4122
0.0005 0.0001
0.001 0.001302
0.0006 0.0001
가 구성품들의 변량에 대해 둔감한 구동기의 성 능을 제공할 것으로 기대할 수 있다.
Table 3 Design comparisons
pi po
(,) for Y1 (6.0187, 0.0607) (4.2225, 0.0281) (,) for Y2 (10.6125,0.3737) (18.0167, 1.1726)
Pr(F(p)) 0.5245 0
Table 4 Design comparisons (step input)
pi po
(,) for Y1 (5.7409, 0.5932) (2.6403, 0.3486) (,) for Y2 (37.384, 1.6647) (54.1964, 2.1587)
Fig. 8 Response of canard angle over time
(a) pi
(b) po
Fig. 9 Histograms of Y1 and Y2 for each design
(a) pi
(b) po
Fig. 10 Histograms of Y1 and Y2 for step input
4. 결 론
본 연구에서는 동적 시스템인 유도 포탄의 구 동기에 대하여 성능지표를 카나드의 단위 각도에 이르는 시간과 임의 시점에서의 카나드 응답 각 도로 정의하고 확률적 설계방법을 적용하여 강, 건설계를 수행한 결과를 제시하였다.
실험계획법과 매틀랩 시뮬링크를 통합하여 구동 기 성능지표를 시스템 변수들의 함수로 모델링하 고 민감도 분석을 통해 14개의 시스템 변수 중 민 감한 영향을 미치는 평기어의 기어비와 웜기어의 전송률을 포함한 6개의 변수를 설계변수로 선정하 여 시스템 변수들의 변량에 둔감한 구동기 성능을 제공할 수 있는 설계변수 최적화를 수행하였다 최. 적화된 설계값은 시스템 변수들의 변량에 둔감하 며 카나드의 단위 각도에 이르는 시간을 감소시켰, 으며 임의 시점에서의 카나드 응답 각도를 증가시 킴으로써 구동기의 성능을 개선하였다.
본 연구에서는 서보 제어기에 의한 제어를 고 려하지 않았지만 본 연구에서 제안한 방법론은 제어기 설계에도 적용이 가능하며 향후에는 제, 어기에 대한 최적설계를 수행할 예정이다.
후 기
이 논문은 주 한화의 지원을 받아 수행된 연구( ) 이며 이에 감사드립니다.
참고문헌
(1) Massey, K. C., Heiges, M. W., DiFrancesco, B., Ender, T. R., and Mavris, D. N., 2006, “A System-of-Systems Design of a Guided Projectile Mortar Defense System,” 24th Applied Aerodynamics conference, SanFrancisco, California.
(2) Crespo, L. G. and Kenny, S. P., 2005, “Robust Control Design for Systems with Probabilistic Uncertainty, Langley Research Center at National Institute of Aerospace,” Hampton, Virginia (NASA/TP- 2005-213531).
(3) Savage, G. J. and Son, Y. K., 2008, “Design-for- Six-Sigma for Multiple Response Systems,” Interna- tional Journal of Product Development(Special Issue on building reliability into products during the product development process), 5(1/2), pp. 39~53 (4) Seecharan, T. S., 2007, “Probabilistic Robust
Design for Dynamic Systems Using Metamodelling,”
Master Thesis, Univ. of Waterloo.
(5) Siouris, G. M., 2003, “Missile Guidance and Control Systems,” Springer-Verlag.
(6) Pillay, P. and Krishnan, R., 1989, “Modeling, Simulation, and Analysis of Permanent-Magnet Motor Drives, Part II: The Brushless DC Motor Drive,” IEEE Transactions on Industry Applications, Vol. 25, No. 2, pp. 274~279.
(7) Juvinall, R. C. and Marshek, K. M., 2003,
“Fundamentals of Machine Component Design,” 3th Edition, Wiley.
(8) Yeh, T.-J. and Wu, F.-K., 2009, “Modeling and Robust Control of Worm-Gear Driven Systems,” Simulation Modelling Practice and Theory, Vol. 17 (5), pp. 767~777.
(9) Son, Y.K., 2010, "Derating Design for Improving System Reliability by Using a Probabilistic Approach,"
Transactions of the KSME A, Vol. 34, No. 6, pp.
743~749.