ISSN: 1738-7167
DOI: http://dx.doi.org/10.7731/KIFSE.2015.29.6.109
특수재난지역 정찰로봇 시제품의 성능평가연구
곽지현
방재시험연구원
Performance Evaluation of Search Robot Prototypes for Special Disaster Areas
Jihyun Kwark
Fire Insurers Laboratories of Korea
(Received June 24, 2015; Revised November 16, 2015; Accepted November 24, 2015)
요 약
고열과 다량의 연기, 유독가스, 방사능 등을 수반하는 사고 현장에서 소방관을 대신하여 시야확보가 가능하고 화염으 로 인한 고열을 극복하며 탐색 및 구조활동을 수행할 수 있는 3종의 특수한 정찰로봇이 최근 개발되었다. 이러한 로봇 은 내열성능과 다양한 장애물 극복성능이 있어야 하고 화재진압성능과 탐색성능도 갖추어야 한다. 본 연구에서는 이러한 특수재난지역 정찰로봇의 다양한 성능시험을 통해 실용성을 검증하고자 하였다. 시험결과 소형 및 중형 로봇은 100~
200
oC 의 주위환경에서, 소방관탑승형 로봇은 500
oC 의 환경에서도 30분 이상 활동이 가능한 것으로 나타났고, 특히 소 방관 탑승형 로봇은 A 10 단위 화재모형을 3분 이내에 소화하여 화재진압성능도 우수한 것으로 나타났다. 또한 3종 로 봇 모두 다양한 장애물 극복성능과 현장운용성능이 양호한 것으로 확인되어 특수재난현장에서의 활약이 기대된다.
ABSTRACT
Recently, three kinds of search robot prototypes were developed to assume the role of fire fighters for search and res- cue missions in special disaster areas with high heat, smoke, toxic gases, or radioactivity. To accomplish search missions, these robots should be able to endure heat, overcome various obstacles, suppress fires, and see through dense smoke. This study investigated the heat resistance, practicality, and fire fighting capacity of these robots. The results show that the small and middle-sized robots were resistant to surrounding temperatures of 100~200
oC, and the fire-fighter-riding robot could endure up to 500
oC for half an hour. The fire-fighter-riding robot showed excellent extinguishing performance on an A-10 class fire model, which was extinguished within 3 min. The robots also showed various capacities for overcom- ing obstacles and are expected to play an active role in various special disaster areas.
Keywords : Special disaster areas, Search robot, Field operation, Performance evaluation
1. 서 론
최근 급속한 도시화, 산업화에 따라 화재, 폭발, 원전사 고, 테러 등의 피해도 갈수록 증가하고 있으며, 지구온난 화와 이상기후 등의 영향으로 지진, 홍수와 같은 자연재난 도 점점 늘어나고 있다. 이에 따라 여러 국가에서는 고열, 방사능, 연기, 유독가스 등으로 소방대의 탐색이 어려운 특수재난지역에서 효과적인 탐색 및 인명구조활동을 수행 할 수 있는 특수재난지역 정찰로봇에 대한 연구개발을 진 행해 왔으며, 최근에는 국내에서도 이러한 로봇에 대한 개 발이 시도되었다(1-3). 이러한 로봇은 폐쇄된 공간에서의 심 리적 부담감이나 농연으로 인한 사물 인식력 저하, 유독가
스 중독, 화염으로 인한 고열 등으로부터 인간보다 훨씬 유리하기 때문에 재난현장에서 유용하게 활용될 수 있을 것으로 기대된다(4,5). 이 연구에서는 특수재난현장의 탐색 및 구조활동에 활용하기 위해 개발한 원격조종형 정찰로 봇의 개발 내용을 살펴보고 내열시험과 구동시험, 화재진 압성능시험 등을 통해 실용성을 평가하고자 한다.
2. 특수재난지역 정찰로봇 시제품의 개발
2.1 특수재난지역 정찰로봇 시제품의 종류 및 성능목표 본 연구에서 평가한 특수재난지역 정찰로봇은 인명탐색 및 내부정보수집이 주 용도인 소형정찰로봇(소형)과, 출입
E-Mail: [email protected]
TEL: +82-31-887-6600, FAX: +82-31-887-6660
문 파쇄 등 정찰활동 지원을 위한 중형정찰지원로봇(중형), 화재진압 및 재실자 구조를 위한 소방관탑승형로봇(대형) 등 3종을 대상으로 하였으며 각각의 정량적 성능목표는 Table 1과 같다(6).
2.2 특수재난지역 정찰로봇 시제품의 성능사양
개발된 정찰로봇은 3종으로 화재, 폭발, 붕괴, 침수 등 특 수재난지역에 소형과 중형 로봇이 먼저 함께 투입되는데 크기가 작고 민첩한 소형정찰로봇이 앞장서 탐색을 하게 되고, 현장에서 폐쇄된 구획실을 만나게 되는 경우 매니퓰
레이터에 파쇄장치를 장착한 중형정찰지원로봇이 출입문 을 개방하여 진입 및 탐색활동을 지원하게 된다. 건물 밖에 서 원격조종자는 정찰로봇에 장착된 CCD 및 열화상 카메 라를 이용하여 생존자 및 내부정보를 실시간으로 획득할 수 있으며, 중형정찰지원로봇에 설치된 가스센서나 온도센 서, 방사능탐지센서 등을 통해 환경정보를 취득할 수 있다.
정찰로봇을 통해 생존자 및 요구조자를 발견하게 되면 소 방관탑승형로봇을 투입하여 신속, 정확, 안전하게 구조작업 을 수행하게 된다. 3종의 로봇 모두 충전식 전동모터로 구 동되는 무한궤도(캐터필러) 형으로 소형과 중형은 플랫폼 Table 1. Search Robot Class and Developing Objective
Robot Item
Small searching robot
Searching support robot
Fire-fighter riding
robot Note
Weight 50 kg Up tp 250 kg Up to 700 kg Pay load (weight × 30%) Degree of freedom (DOF) 4 4 3 (Water monitor) Manipulator
Working time up to 2 hours Telecommunication type Wire/Wireless Telecommunication
distance
Wireless 300 m 300 m 300 m
Wire 100 m 200 m 200 m
Water proof 10 m deep IP54 Life water proof
Vertical obstacle 20 cm
Stairway/Inclined way 30 degree
Fire resistance - 20 min (100oC) 30 min (100oC) 1 hour (200oC) View height Up to 50 cm Up to 180 cm Up to 180 cm
Speed 4 km/h 4 km/h 10 km/h
Distance of visibility Up to 15 m in 100% smoke concentration
Shock resistance - - 10 kg at 5 m height
Table 2. Specification of Search Robot Prototypes Item Size(mm) Weight
(kg) DOF Climbing angle (degree)
Speed (km/h)
Seeing through
distance (m) Note
Small 825 × 660 × 490
045
4 30 6 15 Water proofMiddle 1,525 × 780 × 700 150 4 30 5.7 15 Door breaking Large 2,200 × 1,300 × 1,680 680 3 30 18 15 Man riding
Figure 1. Search robot prototypes for special disaster areas.
상부에 매니퓰레이터가 장착되어 있으며 소방관탑승형로 봇은 기본적으로 원격조종이 가능하나 필요 시 소방관이 직접 탑승하여 운행할 수 있도록 설계되어 있다. 각 정찰로 봇 시제품의 크기와 무게 등 세부사양은 Table 2와 같다.
2.3 특수재난지역 정찰로봇 주요 구성품의 개발 2.3.1 매니퓰레이터의 설계 및 개발
정찰로봇용 매니퓰레이터는 베벨기어박스로부터 미소한 백래쉬(Back-lash) 오차가 발생하기 쉬우므로 하단부에 구 동모터를 배치하고 각 링크의 말단부에 하모닉 드라이브 감속기를 배치하여 백래쉬 오차를 최소화 하였으며, 하단 부의 구동동력이 상단부로 전해 질 수 있도록 각 축에 중 공축 구조로 설계하였다. 소형정찰로봇 매니퓰레이터는 4 축, 중형정찰지원로봇 매니퓰레이터는 3축의 구조를 가진 다. 특히 소형정찰로봇 매니퓰레이터는 침수지역에 투입할 수 있도록 각 동력전달축과 회전구동부에 오일씰이 부착 되어 있고, 각 하모닉 드라이브 감속기 실린더에 가스켓을 이용하여 방수처리를 하였다. 4축 매니퓰레이터의 가반중 량 및 역학해석은 4축 매니퓰레이터의 설계 제약조건을 바탕으로 각 링크의 구동력 선정을 위한 관성모멘트 및 부
Figure 2. Structure of manipulators.
Figure 3. Platforms of small and middle search robot.
하 토크에 대한 역학적 해석과 각 관절의 부하 토크 및 구 동을 위한 용량선정 및 선정된 모터의 안정성 평가를 수행 하여 매니퓰레이터의 설계에 반영하였다.
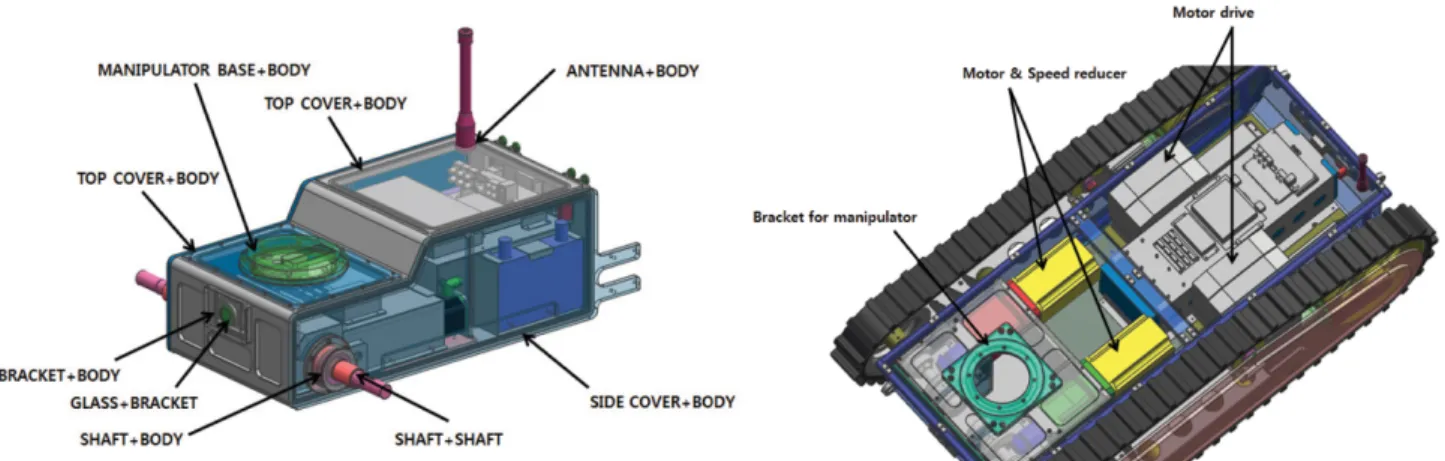
2.3.2 정찰로봇 플랫폼의 설계 및 개발
특수재난현장 정찰로봇의 몸체이자 구동력의 중심이 되 는 플랫폼의 설계를 위해 로봇의 형태, 동력장치, 중량, 장 애물 극복성능 등을 고려하였다. 우선적으로 플랫폼은 경 량화 되어야 하는데 재질면에서는 프레임을 경량화하기 위해 알루미늄을 적용하였다. 부품 측면에서는 트랙풀리 재료를 철제에서 경량재질인 알루미늄으로 변경하였고 보 조트랙 틸팅모터를 기존 2개에서 1개로 줄였다. 보조트랙 틸팅 모터가 2개인 경우 독립동작이 가능하지만 장애물 극복과 계단 및 경사로 등판 등에 있어 2개의 보조트랙이 동시에 같은 각도로 제어되는 것이 효율적이므로 보조트 랙이 동시에 동작 할 수 있도록 하였다.
2.3.3 제어장치와 원격조종기의 설계 및 개발
본 특수재난현장 정찰로봇의 개발에 있어 효율적인 배 선작업과 로봇에서 하드웨어 부품이 차지하는 비중을 줄 이기 위해 통합시스템 보드를 적용하였다. 전체적인 구성 은 통신부와 제어부로 나누어지며 양쪽간의 통신은 Serial Peripheral Interface (SPI) 방식으로 이루어진다. 통신부는 주행에 필요한 각종 데이터 및 영상, 음성의 송수신을 담 당하며, 제어부는 통신부로부터 수신한 각종 로봇 관련 데 이터에 따라 로봇의 운용모드 설정, 동작 및 관련 작업 등 을 담당한다. 제어부는 매니퓰레이터 관리모듈과 주행관 리모듈을 포함하는데 매니퓰레이터 관리모듈은 장착된 매 니퓰레이터의 수자동 조종 등 동작 및 자세 제어를 담당하 고, 주행관리모듈은 메인트랙 및 보조트랙의 구동을 포함 해 센서들의 데이터 처리와 같은 세부기능을 담당한다.
2.3.4 투척형 중계기의 설계 및 개발
건물 내부나 지하가 등의 재난현장은 무선통신이 자유
롭지 못한 조건이 대부분이므로 원활한 통신을 위하여 중 계기를 개발하였다. 개발한 중계기는 특수재난현장의 특성 에 맞추어 통신장애구역에 신속하게 투입할 수 있도록 Figure 4와 같이 투척형으로 설계하였으며 쉽게 던질 수 있도록 안테나를 손잡이 형태로 고안하였다. 투척용 중계 기는 회로기판, 구동용 배터리, 안테나로 구성되어 있고 이 부품들을 보호하기 위해 충격 흡수 브라켓 및 커버로 둘러싸여 있으며, 내열성능을 가지도록 피크(Peek) 재질의 커버에 세라믹 페이퍼를 붙여 제작하였다. 세라믹 페이퍼 는 벌크화이버에 소량의 유기결합체를 첨가하여 종이형태 로 만든 제품으로 단열성이 우수하며 두께 100 마이크론 이하로도 제작이 가능하다.
3. 특수재난지역 정찰로봇 시제품의 성능평가
개발된 특수재난지역 정찰로봇 시제품의 실용성을 평가 하기 위한 성능시험 항목은 앞 장에서 설명한 개발목표의 각 항목별 성능을 확인할 수 있도록 시험절차 및 시험방법 을 수립하여 실시하여야 한다. 3종의 정찰로봇에 요구되는 성능항목은 내열성능, 탐색성능, 통신성능을 비롯하여 각 종 장애물과 계단 및 경사로를 통과할 수 있는 구동성능과 화재진압성능 등 매우 다양하다. 이 논문에서는 선행연구 에서 다룬 탐색성능과 통신성능을 제외하고 내열성능과 각종 장애물 통과를 위한 구동성능, 소방관탑승형로봇의 화재진압성능에 대해 집중적으로 고찰하고자 하였다.
3.1 내열성능평가
특수재난지역에 투입되어 정찰 및 탐색임무를 수행하는
경우 화재나 폭발과 같은 고열 현장에서 로봇의 기능을 유 지하기 위해서는 일정한 내열성능이 필요하다. 본 정찰로 봇은 기본적으로 금속제품이나 기능 및 구조상 열에 취약 한 부분이 있으며, 특히 고무 재질의 캐터필러와 몸체 내 부의 전자장비 모듈상자, 플랫폼, 중계기 등이 일정한 내 열성능을 확보하고 있어야 한다. 각각에 대해 다음과 같이 시험환경 및 시험방법을 수립하여 내열성능을 평가하였다.
3.1.1 캐터필러
캐터필러는 구동부에 해당되며 금속 플랫폼과는 달리 고무와 심금(metal core), 스틸 코드(steel cord)가 조합된 크롤러 제품으로 열에 가장 취약한 부분 중 하나이다. 고 무는 천연고무와 합성고무가 혼합된 것으로 심금과 견고 하게 고정되어 있고, 심금 위에 스틸 코어가 보강되어 크 롤러의 총 강도를 강화시켜 준다. 캐터필러의 내열시험은 고온조를 이용하여 주위온도 250oC의 조건에서 1시간 동 안 유지한 후 이상 유무를 확인하였으며 시험결과 균열이 나 용융 등 이상이 없었다. 따라서 자체 냉각기능이 없는 소형정찰로봇 및 중형정찰지원로봇의 경우 화원과 일정한 거리만 유지하면 고열환경에서도 일정시간 동안 구동이 가능한 것으로 판단된다.
3.1.2 전자장비 모듈상자
정찰로봇의 구동을 위한 전자장비는 단열 재질의 모듈 상자 안에 탑재되어 플랫폼 내부 몸체에 장착된다. 모듈상 자는 2 mm 두께의 강판으로 제작하고 내부에 유리섬유로 코팅 하였으며 덮개 가장자리에는 내열 실리콘 시트(seat) Figure 4. A throwing type relay.
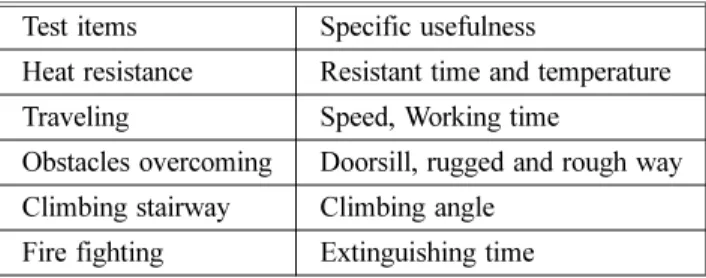
Table 3. Performance Test Items
Test items Specific usefulness
Heat resistance Resistant time and temperature Traveling Speed, Working time
Obstacles overcoming Doorsill, rugged and rough way Climbing stairway Climbing angle
Fire fighting Extinguishing time
Table 4. Test Method for Heat Resistance of Principal Modules Module Heating
method
Heating temperature (oC)
Heating
time (h) Test method Note
Caterpillar Heating
chamber 250 1 Maintain the specimen for 1 h at 250oC and check crack or melting
Electronic module box
Heating
chamber 100 0.5~1 Maintain the specimen for 30 min~1 h at 100oC and check the function
Platform Furnace 500 0.5~1 Maintain the specimen for 30 min~1 h at 500oC
and check the temperature variation Measuring 4 points Relay Heating
chamber 100~200 0.5~1 Maintain the specimen for 30 min~1 h at 100~200oC and check the function
처리를 하였다. 이 전자장비 모듈상자의 내열성능을 살펴 보기 위해 실제와 동일한 모듈상자에 회로기판과 전자부 품을 넣고, 온도변화 관찰을 위해 상자 안쪽 표면 부근과 중심에 각각 K형 열전대를 장착하고 100oC로 설정된 고 온조 속에 투입하여 내열시험을 실시하였다. 모듈상자의 크기는 800 mm (L) × 600 mm (W) × 800 mm (H)이며 실 제 장착되는 전자회로와 거의 유사하게 구성하였고 소형 카메라를 설치하여 가열하는 동안 회로가 정상적으로 동 작하여 영상정보를 무선으로 전송하여 주는지 관찰하였다.
고온조에 모듈상자를 넣고 가열한 결과 30분 동안 상자 내부의 온도는 전자회로의 일반적인 내열한계인 70oC 이 하로 유지되었다. 상자 내부표면과 중심부의 온도차는 크 지 않았으며 가열 후 약 45분경과 시 80oC까지 상승하였 고 이 때까지 정상적으로 영상이 전송되며 전자회로가 동 작하여 성능개발목표인 동작시간 30분을 달성하였다. 시 험기간 동안 모듈상자 내부의 온도변화는 Figure 6과 같다.
3.1.3 플랫폼
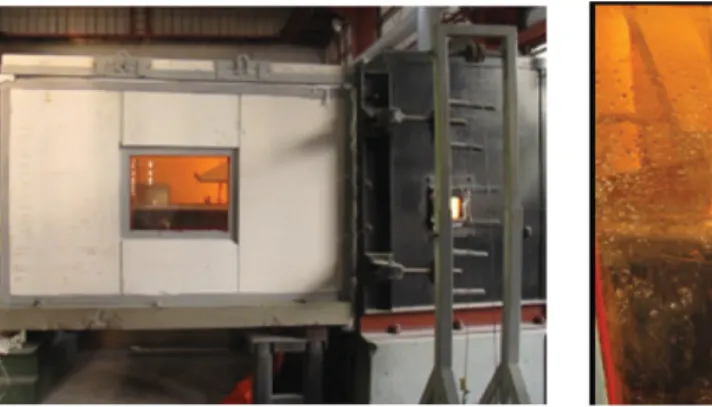
3종의 정찰로봇 중 소방관탑승형로봇은 화재발생구역 내에 직접 진입하여 화재를 진압하는 기능을 가지고 있으
므로 보다 우수한 내열성능을 요구하게 된다. 따라서 성능 개발목표인 200oC를 뛰어 넘어 주위온도 500oC의 환경 에서 30분 이상 정상가동하는 것을 목표로 하였다.
소방관탑승형로봇의 내열시험은 국제표준에 규정된 내열 시험방법을 준용하였는데 소형가열로를 이용하여 화재현 장의 최고주위온도로 알려진 500oC 이상의 환경을 모사하 고 그 안에 로봇 플랫폼을 투입하였을 때 플랫폼의 위치별 실시간 온도변화를 계측하였다. 시험은 1,600 mm (L) × 1,200 mm (W) × 1,200 mm (H) 크기의 콘크리트 챔버를 제작하여 수직가열로에 부착하고, 챔버 내부에 알루미늄 재질의 몸체를 가지는 1/2 스케일의 플랫폼을 설치하여 주 요 부위에 K형 열전대를 부착한 후 실시하였다. 수직가열 로는 ISO 834-1의 표준 온도-시간 가열곡선에 따라 제어 되며 챔버 내부온도가 500oC가 되면 일정하게 온도를 유 지하도록 하였다. 본 소방관탑승형로봇은 호스와 연결된 소화용수를 플랫폼에 설치된 배관과 노즐을 통해 분사하 며 자가분사방식으로 몸체를 냉각하여 내열성능을 확보하 도록 설계되어 있다. 플랫폼 주요 부위의 온도변화측정을 위한 열전대 위치는 Figure 7과 같다.
챔버 내의 최대온도를 500~550oC로 유지하며 플랫폼의 내열시험을 실시한 결과 가열로 쪽 화원에 제일 가까운 로 봇 전면부의 온도는 30분 경과 시 약 350oC까지 상승하였 으나 플랫폼 중앙 상부 및 측면 캐터필러 부위의 표면온도 는 100oC 이하로 유지되었고, 특히 플랫폼 내부의 최고온 도는 45oC 이하로 유지되었다. 또한 플랫폼과 캐터필러의 손상이나 탈락은 나타나지 않아 고온의 재난환경에서도 30 분 이상 로봇이 정상적으로 작동 가능한 것으로 판단된다.
3.1.4 투척용 중계기
개발된 투척형 중계기의 내열시험은 고온조를 이용하여 100oC와 200oC의 주위환경에 노출 시 정상동작 여부를 확인 하였으며, 화재현장 최고주위온도인 500oC의 환경 Figure 5. Caterpillar after fire resistant test.
Figure 6. Temperature variation inside module box. Figure 7. Thermocouple position.
에서도 최대통신시간을 확인하고자 하였다. 우선 고온조의 온도를 100oC로 설정하고 내부 중심부에 열전대를 장착 한 중계기를 투입한 뒤 PC를 이용해 무선통신상태와 온도 변화를 1초 간격으로 확인하였으며 신호가 전송되지 않을 때까지 가열하였고 설정온도 200oC와 500oC에 대해서도 똑같이 반복하여 실시간으로 관찰하였다. 투척용 중계기는 몸체가 피크(peek) 재질에 세라믹 페이퍼(ceramic paper) 를 부착하여 제작한 것으로 가볍고 단열성능이 우수하다.
시험결과 Figure 10과 같이 주위온도가 100oC와 200oC 인 경우에는 시험시작 후 20분 동안 중계기 내부온도가 70oC 이하로 유지되었고 전자회로에서 송신하는 신호도 정상적으로 감지되었다. 따라서 화재나 폭발로 가열된 건 물내부나 실내에서도 20분 이상 통신 중계가 가능한 것으 로 판단되며 실제 현장에서 유용하게 활용할 수 있을 것으 로 사료된다. 또한 주위온도가 500oC인 경우에는 시험시 작 후부터 온도가 급격하게 상승하여 8분 20초경에 70oC 를 넘어섰고 12분경 100oC를 넘었으며, 15분경에 120oC 까지 상승하여 전자회로로부터의 송신이 완전히 끊어졌다.
3.2 구동성능평가
특수재난지역 정찰로봇 시제품의 구동성능을 평가하기
위해 재난현장과 유사한 장애물과 계단, 경사로 등을 모사 하여 주행시험, 장애물 통과시험, 계단 및 경사로 등판시 험 등을 실시하였다.
3.2.1 주행시험
주행시험은 정찰로봇 시제품의 기본적인 구동성능을 평가하기 위한 것으로 30 m의 직선거리를 달려 주행속도 를 측정하였다. 각 정찰로봇의 주행시험을 각각 3회씩 실 시한 결과 주행속도는 Table 5와 같이 나타났으며 개발 목표인 4 km/h를 초과 달성하였다. 한편 소방대원의 진 입이 어려운 위험현장에 투입되어 유무선 원격조종을 통 해 내부 상황모니터링이 가능한 정찰로봇은 협소구간 및 침수지역 등을 극복하고 내부상황을 확인하는 것이 주목 적이므로 일정시간 끊임없이 움직일 수 있는 성능이 요 구된다. 따라서 재난현장을 모사한 시험장에서 각종 장애 물을 통과하고 카메라 등 주요 장치를 가동하는 상태로 시험한 결과 2시간 이상 연속작동이 가능한 것을 확인하 였다.
3.2.2 장애물 통과시험
장애물 통과시험의 목적은 정찰로봇의 원활한 현장진입 Figure 8. Heat resistant test of the platform.
Figure 9. Temperature variation of the platform. Figure 10. Inside temperature of the relay.
능력과 기동성을 검증하기 위한 것으로 재난현장에는 문 턱, 출입문, 가구, 집기, 무너진 천장, 협소구간, 침수구간 등 다양한 장애물들이 존재한다. 이를 모사하여 수직장애 물, 요철장애물, 험지장애물, 협소구간 모형 등을 제작하였 고 각각의 통과시험을 실시하였다.
3.2.2.1 수직장애물 통과
출입문의 문턱을 모사한 높이 20 cm의 수직장애물은 계 단 높이인 155 mm보다 45 mm 더 높게 설계되었고 로봇 이 장애물 상부에 있을 때 지지할 만한 구역이 작아 특히 소형로봇의 경우 계단 장애물보다 극복이 어려운 부분이 다. 최종 개발된 로봇은 10초 만에 수직장애물을 통과하는 양호한 성능을 보여주었으며 또한 중형로봇은 15초, 소방 관탑승형은 17초 만에 수직장애물을 극복하였다.
3.2.2.2 요철장애물 통과
요철장애물은 재난현장의 무너진 천장이나 쓰러진 집기 류 등을 모사한 장애물 중 들쭉날쭉 튀어나오거나 움푹 들 어간 구역을 모사한 장애물이다. 성능시험을 위해 길이 3 m, 너비 1 m로 제작하였으며 골과 산의 높이 차이는 300 mm로 하여 험난한 재난상황을 모사하고자 하였다. 시 험결과 소형정찰로봇은 24초, 중형정찰지원로봇은 40초 만에 장애물을 완전히 통과하였으며 소방관탑승형로봇은 43초가 소요되었다.
3.2.2.3 험지장애물 통과
험지장애물은 재난현장의 무너진 천장이나 쓰러진 집기 류 등을 모사한 장애물 중 여러 물체가 겹겹이 쌓여 울퉁 불퉁해진 통로를 모사한 장애물이다. 이를 모사하기 위해 철판을 휘거나 작은 물체들을 붙여 험로를 구현하였으며 길이 4 m, 너비 2 m, 경사각도는 최저 12도에서 최고 51 도로 하여 험난한 재난상황을 모사하고자 하였다. 시험결 과 소형정찰로봇은 28초, 중형정찰지원로봇은 44초 만에 장애물을 완전히 극복하였다.
3.2.2.4 협소구간 통과
재난현장의 장애물로 인해 좁아진 통로를 극복하기 위 한 성능을 확인하기 위해 높이 0.8 m, 길이 1 m의 철재판 여러 개를 조립식으로 이어 붙여 폭 1.5 m의 좁은 통로를 만들고, 일정간격으로 여러 차례 꺾어 원격조종에 의한 협 소구간 주행 및 선회 능력을 검증하고자 하였다. 협소구간 중간에는 수직장애물도 하나 설치해 두었는데 시험결과 3 종의 로봇 모두 약 1분 20초에서 2분 사이에 협소구간을 완전히 통과하였다.
3.2.3 계단 및 경사로 등판시험
본 연구에서 계단 및 경사로의 등판능력에 대한 정량적 목표는 경사도 30도이다. 계단모형은 건축법의 규정에 따라 실제 계단과 유사하게 제작하였다. 법에 의하면 한 단의 높 이는 18 cm 이하, 단의 너비는 26 cm 이상이 되어야 하는데 규정에 적합하고 정량적 목표인 30도를 충족시킬 수 있도록 높이 15.5 cm, 너비 26 cm, 경사도 31도로 제작하였다. 등판 성능시험은 정찰로봇이 계단 및 경사로를 정상적으로 오르 내리는지 여부를 확인하고 소요시간을 측정하였다.
시험결과 소형정찰로봇과 중형정찰지원로봇, 소방관탑승 형로봇 모두 무난히 등판 및 하강에 성공하였는데 각도 변 화가 큰 계단 장애물이 경사로 장애물에 비해 상대적으로 통과시간이 오래 걸렸다. 소형로봇의 경우 개발 초기에는 상승모드의 최종 탈출과정과 하강모드의 진입 과정에서 급 격한 무게중심의 변경으로 전복될 우려가 높아 소요시간이 길었으나, 최종 개발된 시제품은 매니퓰레이터의 위치변경 을 통한 무게중심 이동으로 소요시간을 상당히 단축하였으 며 특히 계단 하강 시의 성능개선이 두드러졌다.
3.2.4 종합운용시험
특수재난지역 정찰로봇의 주행시험이나 장애물 통과시 Table 5. Result of Travelling Test
Robot Distance (m)
Travelling time (s) Speed (km/h)
1st 2nd 3rd Average
Small 30 17.9 18.1 18.0 18.0
06.0
Middle 30 19.1 19.0 19.0 19.0
05.7
Large 30
06.0 06.0 06.1 06.0
18.0Figure 11. Various obstacles.
험 등을 통해 기본적인 구동성능을 확인하는 것도 중요하 지만 로봇을 현장에 투입하였을 때 전송되는 내부의 화상 정보를 통해 원격으로 로봇을 조종하고 통제하는 것은 고 도의 기술을 필요로 한다. 즉 실제 재난현장에는 다양한 장애물이 복합되어 존재하므로 실제와 유사하게 재난상황 을 모사한 시험장을 구축하여 정찰로봇의 임무수행능력을 검증해 보아야 한다. 정찰로봇의 종합운용능력을 평가하기 위해 이러한 점들을 고려하여 재난현장의 시나리오를 구 축하고 임무를 수행하기 위한 종합운용시험을 실시하였다.
시험절차는 다음과 같다.
① 험지, 경사로, 협소로 등을 모사한 장애물 모형을 종 합시험장 건물 내부에 설치한다.
② 시험장 건물 내부로 로봇과 중계기를 투입하고 조종 자는 일정거리의 시험장 밖에서 원격조종장치의 모니터를 통해 로봇을 조종한다.
③ 조종자는 사전정보 없이 마주치는 장애물들을 통과 하여 나아간다.
Table 6. Result of Climbing Stairway and Slope
Obstacle
Climbing time (s) Small
robot
Middle robot
Large robot
Stairway Up 28 50 30
Down 20 42 35
Slope Up 26 43 30
Down 19 40 31
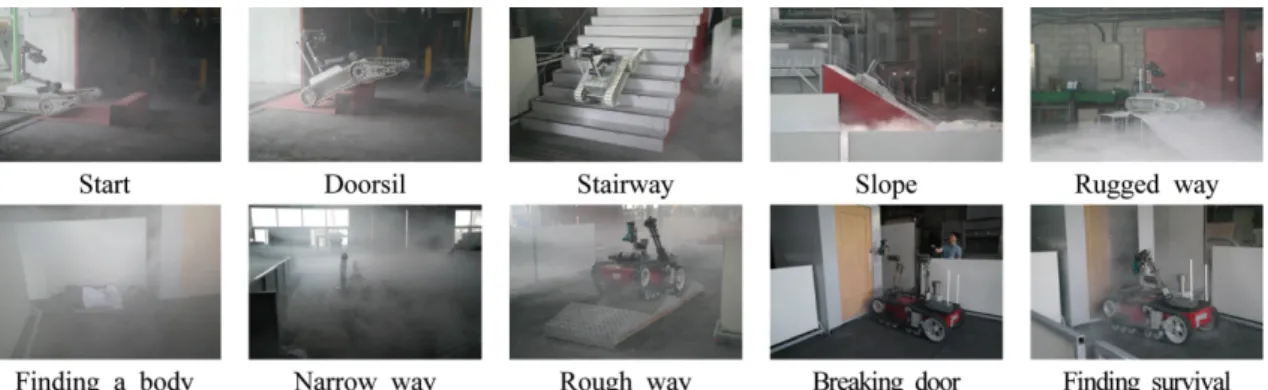
Table 7. Field Operation Scenario
1 2 3 4 5 6 7 8 9
Start Passing doorsill
Climbing stairway/
slope
Passing rugged obstacle
Finding 1st simulated
body
Passing narrow way
Passing rough obstacle
Passing flooded way
(small)
Breaking door (middle)
Finding 2nd body in an enclosure
Table 8. Result of Field Operation Test of Small Searching Robot
Step 1 2 3 4 5 6 7 8 9
Mission Start Doorsill Stairway/
slope
Rugged obstacle
1st body
Narrow way
Rough obstacle
Flooded way
2nd body in an enclosure Elapsed time
(min:s)
1st 0:00 0:20 1:06/1:59 2:32 3:24 6:25 7:22 8:36 9:14 2nd 0:00 0:24 0:59/1:50 2:19 3:09 4:45 5:12 6:08 6:50
Table 9. Result of Field Operation Test of Middle Searching Support Robot
Step 1 2 3 4 5 6 7 8 9
Mission Start Doorsill Stairway/
slope
Rugged obstacle
1st body
Narrow way
Rough obstacle
Breaking door
2nd body in an enclosure Elapsed time
(min:s)
1st 0:00 0:21 1:10/2:15 3:03 3:35 7:30 8:55 13:45 13:50 2nd 0:00 0:36 1:30/2:08 2:40 3:15 5:35 6:50 11:08 11:15
④ 각 장애물 통과시간과 인명탐색, 출입문 파쇄 등 임 무완료시간을 측정한다.
⑤ 각 정찰로봇에 대해 시험을 반복 수행하여 현장운용 능력을 평가한다.
각 정찰로봇의 현장운용시험을 위한 임무 시나리오는 다음과 같이 설정하였다.
소형정찰로봇의 경우 1차 시험결과 로봇이 진입한 뒤 곧바로 수직장애물이 나타났으며 약 20초 만에 통과한 후 계속 진입하였다. 그 후 2층으로 올라가는 계단이 나타나 계단을 등판하였으며 계단모형을 오른 뒤 다시 경사로를 내려오는데 약 1분 40초가 소요되어 진입한지 1분 59초가 경과하였다. 생존자를 찾기 위해 계속 진행하여 험지구간 을 약 30초 만에 통과하고, 건물 내부로 진입한지 3분 24 초가 경과하였을 때 첫 번째 인체모형을 발견하여 조종자 에게 알려주었다. 그리고 잠시 후 협소구간을 약 3분 만에 통과하고 다시 요철장애물을 만나 약 1분 만에 완전히 통 과하였고, 다시 깊이 30 cm, 길이 2 m의 침수구간을 약 1 분 15초 만에 통과하였다. 결국 로봇을 투입한 지 9분 14 초 경과 후 구획실 내의 두 번째 인체모형까지 발견하여 임무를 완수하였다. 똑같은 시나리오를 반복 수행한 2차 시험에서는 조종자의 조종능력이 개선되어 약 2분 20초 가량 임무완수시간이 단축되는 결과를 얻었다.
한편 중형정찰지원로봇은 개별 장애물 통과시험에서 보 여 졌듯이 크기와 중량 특성에 의해 소형로봇보다 민첩성 이 다소 떨어져 로봇의 투입부터 요철장애물 통과까지 소 형정찰로봇 보다 약 1분 30초가량 더 소요되는 것으로 나 타났으나 큰 차이는 나지 않았다. 매니퓰레이터에 장착된
회전톱날을 이용한 구획실의 출입문 파쇄는 평균 3분가량 소요되었으며 출입문 파쇄 후 곧바로 출입문을 개방하여 두 번째 인체모형을 발견하고 임무를 완수하였다.
3.3 화재진압성능평가
3.3.1 방수성능 및 화점조준성능
소방관탑승형로봇에 장착하는 전동방수총의 성능사양과 조준능력을 살펴보기 위해 화재진압시험에 앞서 방수시험 및 화점조준시험을 실시하였다. 먼저 방수압력에 따른 방 수량 및 방수거리는 다음과 같이 나타났다.
화점조준시험은 타겟판을 표적으로 하여 물을 방수하는 실험을 하였는데, 10회의 실험 결과 모두 방수시작 후 10 초 이내에 정확히 목표물을 타격하였으며 직사에서 방사, 방사에서 직사 형태로의 전환성능도 양호한 것으로 나타 났다.
Figure 12. Comprehensive field operation test scenes.
Table 10. Result of Water Discharge Pressure
(MPa)
Flow rate (L/min)
Flow distance (m)
Flow factor (K)
0.3 270 14 155.9
0.5 350 20 156.5
0.7 410 31 155.0
0.9 470 33 156.7
1.0 490 35 155.0
Average 156.0
Table 11. Result of Fire Extinguishing Test
Fire unit Elapsed time (min:sec)
Result Re-ignition Ignition Water discharge Extinguishment Discharge stop
A-20 0:00 3:00 3:35 - Extinguished None
A-40 - - 3:56 - Extinguished None
A-60 - - 4:18 - Extinguished None
A-80 - - 4:58 - Extinguished None
A-10 - - 5:20 5:30 Extinguished None
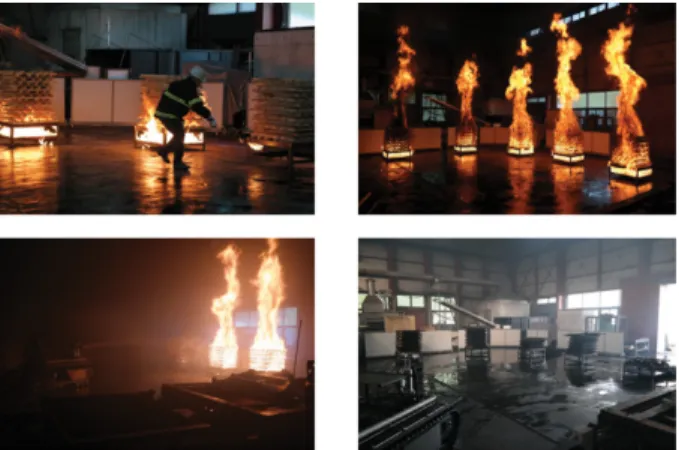
3.3.2 화재진압성능
소방관탑승형로봇의 화재진압성능은 소화기의 소화능력 단위를 측정하는 공인시험기준을 준용하였는데 일반가연 물을 모사한 표준화재모형 중 가장 큰 A급 10단위 모형에 대해 소화시험을 실시하여 성능을 평가하였다. A급 10단 위 소화시험은 2단위 모형 5개를 일정 간격으로 설치하고 연속적으로 화재를 진압하는 시험이므로 점화 후 연속적 인 단위모형별 소화시간을 측정하였다. 점화 후 3분간 자 유연소하고 3분이 경과하는 시점에 첫 번째 모형을 향해 소화수를 방출하기 시작하였으며 첫 번째 모형은 방수 후 35초 만에 소화되었다. 이어서 다음 모형에 계속 방수하여 두 번째 모형은 방수 후 56 만에 소화되었고, 계속하여 세 번째, 네 번째, 다섯 번째 모형까지 완전히 진압하는데 성 공하였고 재발화되지 않았다.
본 소방관탑승형 로봇은 내열성이 좋고 질식의 우려가 없으므로 화원에 더욱 근접하면서 화염 전체를 방호할 수 있는 각도로 물을 방출하며 일시에 화재를 진압하므로 소 화성능이 우수한 것으로 판단된다. 최종적으로 A급 10단 위 소화시험 결과 Table 11과 같이 방수한지 2분 20초 만 에 완전히 소화에 성공하였다.
4. 결 론
이상과 같이 화재, 폭발, 테러현장, 대형화재현장 등 특 수재난지역에 투입되어 재난상황이나 요구조자 정보를 탐 색하고 원격으로 정보를 전송해주는 정찰로봇을 개발하고
성능을 평가하기 위해 소형정찰로봇, 중형정찰지원로봇, 소방관탑승형로봇의 내열성능과 구동성능, 장애물 극복성 능, 재난현장의 종합운용성능 등을 고찰하였다.
실제 재난현장에 정찰로봇을 투입하여 운용하는 경우 조종자는 로봇의 움직임을 보지 못하고 원격조종장치의 모니터에 보이는 화면만을 이용해 조종해야 하므로 협소 구간이나 평지 주행의 경우에는 로봇의 무게중심의 변화 가 작아 안정적인 주행이 가능하였으나 그 밖의 장애물들 은 고도차를 극복해야 하기 때문에 로봇의 자세를 확인할 수 있는 영상이 제대로 제공되지 않는 경우 조종에 어려움 이 따랐다. 따라서 로봇의 기본위치와 주변물체의 위치를 확인할 수 있도록 로봇 몸체 내부 앞뒤에 카메라를 장착하 였고, 매니퓰레이터 말단에 CCD 및 열화상카메라를 설치 하였으며, 중형정찰지원로봇의 경우 몸체 상부에도 별도의 카메라를 설치하여 사각지대를 최소화하고자 하였다. 또한 이러한 개선 및 보완 후 건물의 벽이나 철문 등에 의해 무 선통신의 장애가 발생하는 상태에서 중계기를 이용한 추 가적인 운용시험을 함으로써 현장에 투입 가능한 정찰로 봇의 운용성능을 확인하였다. 내열시험 결과 고온의 재난
현장에서 30분 이상 활동이 가능한 것으로 나타났고, 높은 방수압과 다량의 방수량, 정확한 조준능력으로 화재진압성 능도 우수한 것으로 나타나 본 정찰로봇의 활용성은 우수 한 것으로 기대된다.
이번 연구개발과정을 통해 정찰로봇 자체의 기능과 성 능도 중요하지만 조종자의 숙련된 기술도 현장운용에 있 어 중요한 역할을 담당할 것으로 판단되며, 캐터필러 방식 외에 보다 다양한 형태의 정찰로봇에 대한 개발이 지속되 어야 할 것으로 사료된다.
References
1. DRB Fatec Co., “Development of a Robot for Indoor Fire-Fighting and Saving Life (Final Report)”, Ministry of Knowledge and Economics (2009).
2. DRB Fatec Co., “Development of the Applied Technol- ogy of an Intelligent Robot for Closed Space (Final Report)”, NEMA (2012).
3. J. Kwark and D. S. Kim, “Research Report of Perfor- mance Verification for a Water Mist Fire-Fighting Robot”, Fire Insurers Laboratories of Korea (2008).
4. J. Kwark, “Evaluating Field Working and Fire-fighting Capacity of an Indoor Fire-fighting Robot”, Proceedings of 2008 Spring Annual Conference, Korean Institute of Fire Science & Engineering, pp. 971-981 (2008).
5. H. J. Jeong and J. Kwark, “Field Working Evaluating Method of Searching Robots for Special Disaster Scenes”, Proceedings of 2013 Autumn Annual Conference, Korean Institute of Safety (2013).
6. “Annual Report of Emergency Correspondence Technol- ogy Developing Project for Special Disaster Scenes”, Fire Insurers Laboratories of Korea (2015).
Figure 13. Fire extinguishing test scenes.