† 교신저자, 과학기술연합대학원대학교, 미래첨단교통시스템공학과 E-mail : [email protected]
* 한국철도기술연구원 고속철도연구본부
MR
댐퍼를 이용한 철도차량 승차감 반능동 제어
(Semi-Active Control for Improving Ride Comfort in Railway Vehicle by
MR Damper)
신유정 유원희* 정흥채*
Yu-Jeong Shin Won-Hee You Heung-Chae Jung ABSTRACT
Recently the maximum speed becomes the most important performance in high speed train. But the speed up of train will not give the passenger good riding comfort. The semi-active suspension system by using variable damper with hydraulic solenoid valve is used to solve this problem. But the variable damper with hydraulic solenoid valve requires tank for supplying fluid.
In this study, the MR(Magneto Rheological) damper was considered instead of hydraulic variable damper in order to improve riding comfort.
Dynamic simulation was conducted for semi-active suspension system with MR damper was made by using Matlab-Simulink S/W. According to control strategy of MR damper for improving ride comfort in railway vehicle, The riding comfort of the railway vehicle with semi-active suspension system was analyzed and compared with conventional suspension system by using the program.
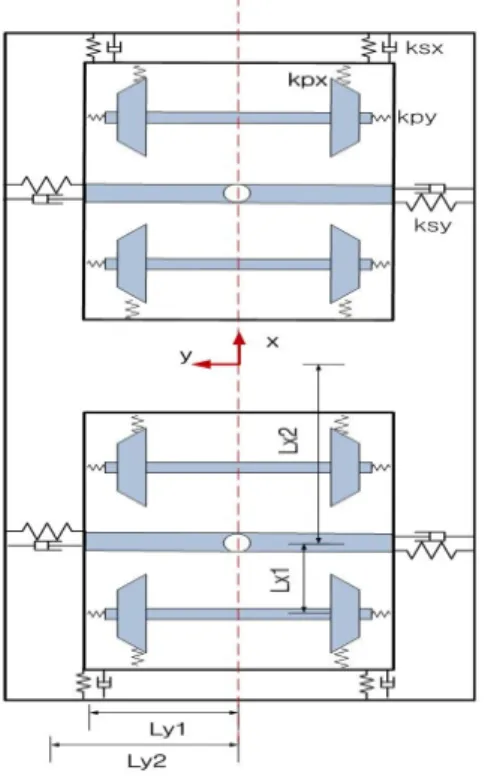
Fig. 1 Dynamic model of railway vehicle
Parameters Lateral Yaw Roll
Wheelset 1 y1 ψ1 -Wheelset 2 y2 ψ2 -Wheelset 3 y3 ψ3 -Wheelset 4 y4 ψ4 -Truck 1 yT1 ψT1 ΦT1 Truck 2 yT2 ψT2 ΦT2 Carbody yc ψc Φc
Table 2 Degree of freedom of vehicle model
(1) y Cx Du Bu Ax x + = + = , ⎥⎦ ⎤ ⎢ ⎣ ⎡ − − = ×− ×− C M K M I O A 17171 17171 , ⎥⎦ ⎤ ⎢ ⎣ ⎡ − = −× F M O B 1711 (2), (3), (4)
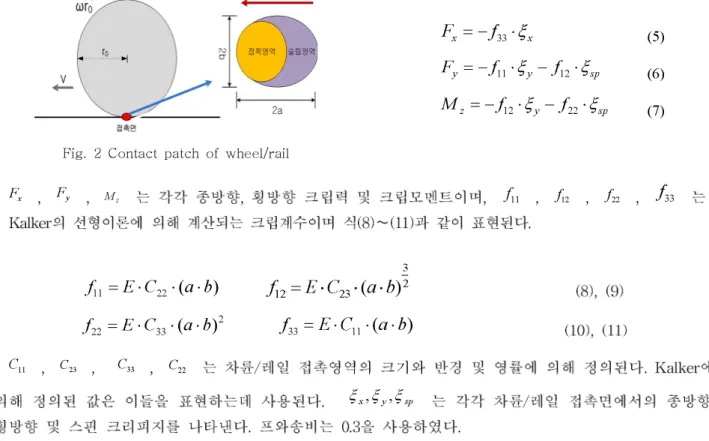
Fig. 2 Contact patch of wheel/rail x x f F =− 33⋅ξ (5) Fy =−f11⋅ξy− f12⋅ξsp (6) sp y z f f M =− 12⋅ξ − 22⋅ξ (7) x F Fy Mz f11 f12 f22 f33 ) ( 22 11 E C a b f = ⋅ ⋅ ⋅ 2 3 23 12 E C ( ba ) f = ⋅ ⋅ ⋅ 2 33 22 E C ( ba ) f = ⋅ ⋅ ⋅ f33 =E⋅C11⋅(a⋅b) 11 C C23 C33 C22 sp y x ξ ξ ξ , , 0 1 2 3 4 5 6 7 8 9 10 -4 -2 0 2 4 6x 10 -3 Time D is pl ac em en t
Full scale Vehicle model
-4 -3 -2 -1 0 1 2 3 4 5 x 10-3 -0.1 -0.05 0 0.05 0.1 Displacement V el oc ity 76.388(m/s) 79.166(m/s) 76.388(m/s) 79.166(m/s)
Fig. 5
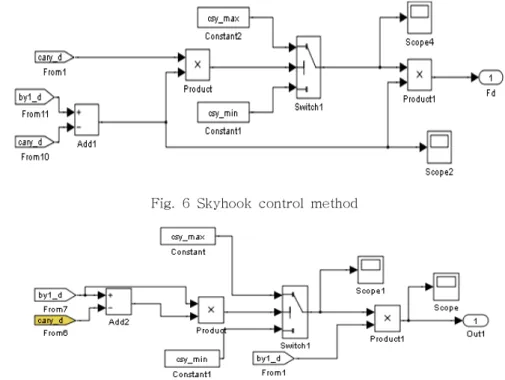
Fig. 6 Skyhook control method
Control Method Lateral Acceleration of Bogie Lateral Acceleration of Carbody Groundhook 2 4 6 8 10 12 14 16 18 20 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 Frequency(Hz) ac ce l A m p.
Full scale : 70km/h , Cmax (groundhook) Control Bogie accel.Y Uncontrol Bogie accel.Y
2 4 6 8 10 12 14 16 18 20 0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 Frequency(Hz) ac ce l A m p.
Full scale : 70km/h , Cmax (groundhook) Control carbody accel.Y Uncontrol carbody accel.Y
Skyhook 2 4 6 8 10 12 14 16 18 20 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 Frequency(Hz) ac ce l A m p.
Full scale : 70km/h , Cmax (skyhook) Control Bogie accel.Y Uncontrol Bogie accel.Y
2 4 6 8 10 12 14 16 18 20 0 0.005 0.01 0.015 0.02 0.025 Frequency(Hz) ac ce l A m p.
Full scale : 70km/h , Cmax (skyhook) Control carbody accel.Y
Uncontrol carbody accel.Y
hybrid 2 4 6 8 10 12 14 16 18 20 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 Frequency(Hz) ac ce l A m p.
Full scale : 70km/h , Cmax (hybrid) Control Bogie accel.Y
Uncontrol Bogie accel.Y
2 4 6 8 10 12 14 16 18 20 0 0.005 0.01 0.015 0.02 0.025 Frequency(Hz) ac ce l A m p.
Full scale : 70km/h , Cmax (hybrid) Control carbody accel.Y Uncontrol carbody accel.Y